水电站控制网复测与点位稳定性分析
2024-02-28 09:19陈昌耀
水利水电快报 2024年1期
收稿日期:
2023-07-06
作者简介:
陈昌耀,男,高级工程师,主要研究方向为工程测量。E-mail:123710709@qq.com
引用格式:
陈昌耀.水电站控制网复测与点位稳定性分析
[J].水利水电快报,2024,45(1):28-32.
摘要:
水电站边坡变形监测对于工程安全运行至关重要,控制网复测与点位稳定性分析是变形监测的基础。以浙江省仙居抽水蓄能电站控制网复测与点位稳定性分析为例,介绍了一级边角网水平角、边长、天顶距观测技术和方法,对观测数据采用测站平差计算、水平角中误差计算、边长观测结果改正计算、三角高程概算等预处理,并检验了观测数据的粗差、控制网粗平差、精密三角高程网平差、平面控制网平差等以判定测量精度,采用平均间隙法和单点位移分量法对控制点稳定性进行分析。结果表明:仙居抽水蓄能电站控制网采用的技术方法能够满足国家一等三角网精度指标,控制网点位误差和误差椭圆均符合精度要求;除TN01点未通过动点检验外,其余点均通过了稳定性检验,没有明显位移变化。
关键词:
控制网复测; 稳定性分析; 平均间隙法; 单点位移分量法
中图法分类号:TV743
文献标志码:A
DOI:10.15974/j.cnki.slsdkb.2024.01.005
文章编号:1006-0081(2024)01-0028-05
0 引 言
抽水蓄能电站被称为电网的“充电宝”,对电網系统具有“削峰填谷”的显著作用,近年来,抽水蓄能迎来黄金发展期[1-2]。为保障抽水蓄能电站上下水库和周边安全,需要定期对其进行变形监测[3-4]。在水电站变形监测中,基准点是建筑物变形的参考基准,需要保证基准点稳定不变。然而,在实际工作中,一些大坝建成后未进入稳定期,一些大坝受周期性水位或气候温度影响,基准点产生位移或变形,这将会使水电站变形监测结果失真,从而得到错误的结论[5-6]。因此,在水电站变形监测项目中,首先要对基准点进行稳定性监测[7],根据监测结果判定是否存在位移点,只有排除不稳定点后,才能实施变形监测,确保变形监测数据真实可靠。工程实践中,判定基准点稳定性的常用方法是把基准点纳入控制网中[8],对控制网进行多期观测,得到基准点坐标,再利用数理统计模型对点位稳定性进行分析。平均间隙法和单点位移分量法[9-10]是点位稳定性分析的常用方法,通过对所有基准点进行动点检验和单点检验,依次寻找不稳定点。本文以浙江省仙居抽水蓄能电站为例,对水电站控制网进行一级边角网复测,并采用四步预处理和四步平差法对观测数据进行处理,获得了高精度基准点位坐标,然后利用数理统计原理对点位进行稳定性分析。
1 工程概况
浙江省仙居抽水蓄能电站于2010年12月开工建设,2016年12月投产,总装机容量1 500 MW。该电站由上水库、下水库、输水系统等建筑物组成,图1为该水电站现场图。电站上水库大坝主体为钢筋混凝土面板堆石坝,坝顶高程679.20 m。为给上水库大坝及库区变形监测提供统一的基准,项目设计了上水库监测控制网,前期已进行了控制网测量,2022年10月对该控制网进行复测。
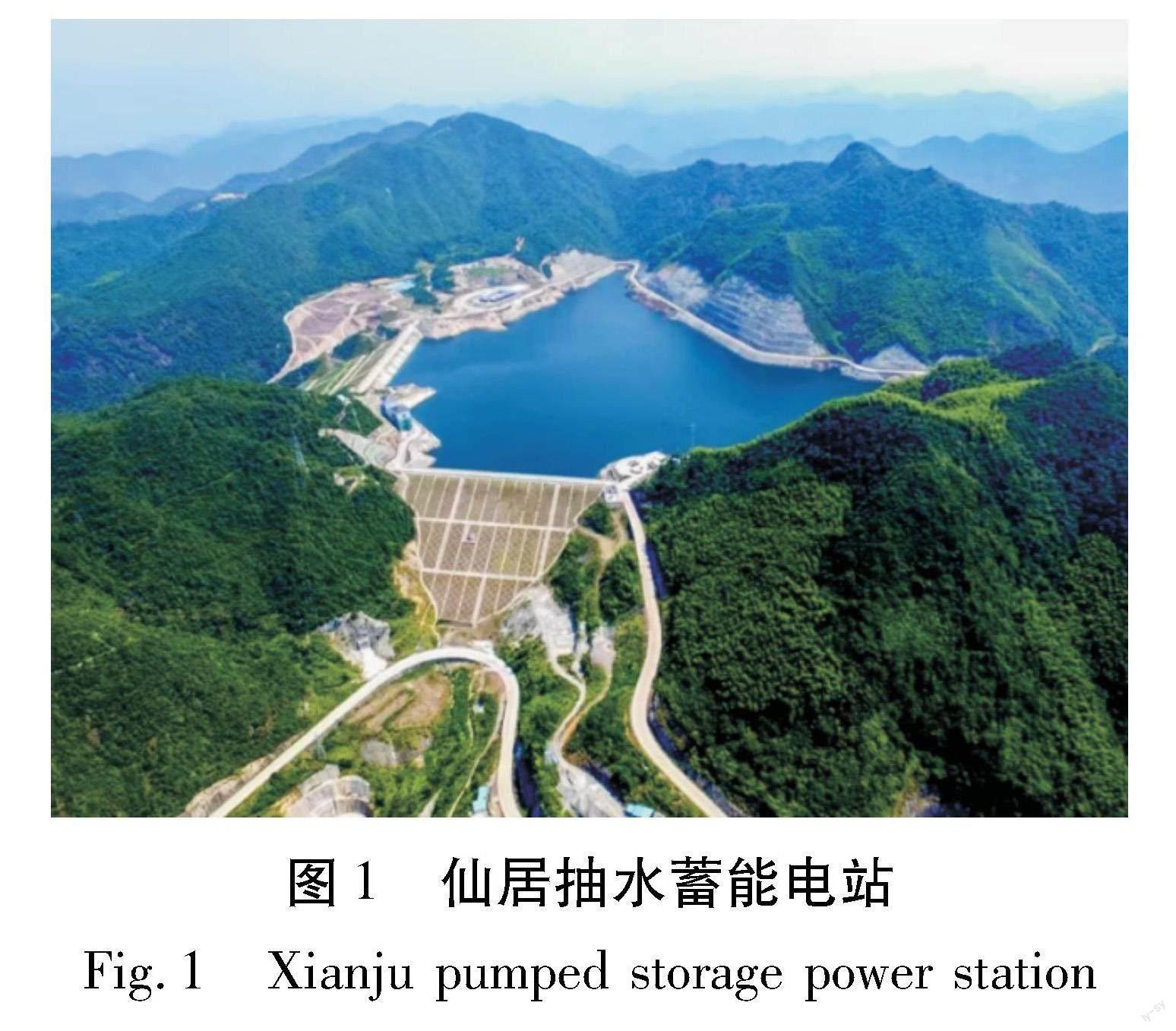
上水库监测平面控制网布设5个基准点,编号分别为TN01,TN02,TN03,TN04,TN05;布设4个工作基点,编号分别为TB01,TB02,TB03,TB04。9个点共同组成一等边角网,标石类型为普通钢筋混凝土观测墩,其网形见图2。
2 控制网复测
2.1 观测项目
观测按一等边角网进行,采用Leica TM30智能型全站仪,其测距中误差为±0.6+1×D×10-6 mm,D表示测量距离,测角中误差为±0.5″,照准标志使用徕卡配套的精密支架、棱镜、觇牌。采用TM3自动目标识别及定位功能进行观测,按照预先设置的指标进行自动识别测量。水平角、边长、天顶距观测具体如下。
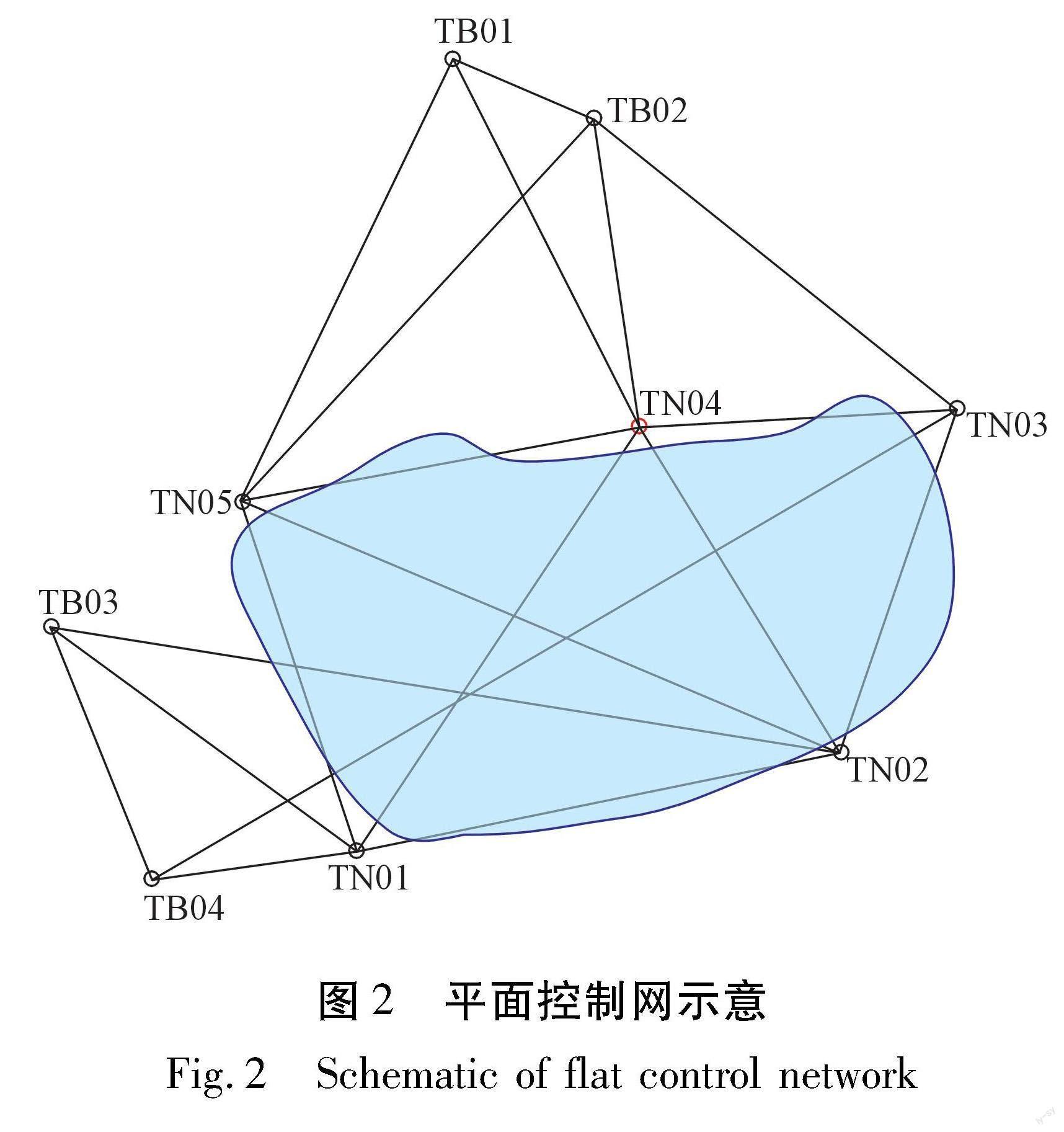
(1) 水平角观测。水平角采用全圆方向观测法,控制网共有38个方向,观测12测回。为提高观测精度,将观测分2个时段完成,每时段6测回。以标石中心为对中点,无测站归心和照准归心改正。观测时,选择全站仪呈像清晰的天气作业,观测均满足限差要求。水平方向观测技术要求见表1。
(2) 边长观测。边长采取对向观测,控制网共观测边长19条。每条边单向观测,分2组进行,每组6测回,观测均满足限差要求,在边长观测时,同时采用DHM2型机械通风干湿温度计和DYM3型空盒气压计测定测站点与镜站点的干温、湿温和气压,作为气象改正的参数。边长观测技术要求见表2。
(3)天顶距观测。每条边对向观测时均进行天顶距观测,共观测38个方向天顶距。观测分2个时段测量,每时段6测回,每个方向盘左、盘右分别观测,观测均满足限差要求。天顶距观测技术要求见表3。
2.2 控制网平差
2.2.1 数据预处理
(1) 测站平差计算。每个测站各个方向均观测了12个测回,同一方向在各测回中的观测值均符合限差要求。对每个测站分别进行测站平差,求得一测回方向中误差最小为±0.308″,最大为±0.675″;12测回方向中数的中误差最小为±0.089″,最大为±0.195″。计算表明此次测站观测中误差满足规范要求。
(2) 水平角中误差计算。控制网38个方向可组成12个三角形、13个极条件。经计算,12个三角形闭合差最大为2″,最小为-1.3″,均小于±2.5″的限差要求;构成的13个图形极条件均小于限差要求;按菲列罗公式m=ww3n(n表示观测的三角形的个数,w表示三角形的闭合差,m表示中误差)计算的测角中误差为0.6″,满足规范规定不大于0.7″的限差要求。上述计算表明此次水平角方向观测值满足国家一等三角网测角规范要求。
(3) 边长观测结果改正计算。在边长原始观测数据中进行了加、乘常数改正,气象改正,周期误差改正,斜距改平及投影改正。经改正后,各条边长对向观测值互差均小于国家一等三角网测边限差20.6+1×D×10-6 mm要求。
(4) 三角高程概算。按照GB/T 17942—2000《国家三角测量规范》要求,用三角高程测定的高差,其三角形三边的高差闭合差应该小于5.0″/105S21+S22+S23(S表示测量距离)。经计算,控制网12个独立三角形三边高差闭合差最小为-3.87 mm,最大为5.45 mm,均小于上述限差要求。
通过以上预处理,验证了本次外业观测成果能够满足国家一等三角网精度指标,也为平差计算提供了可靠的数据基础。
2.2.2 平差计算
(1) 粗差检验。为提高数据可靠性,在平差前对观测值进行粗差检验[11-14],判定是否存在粗差。采用U检验法以α=0.05为置信度,检验没有发现明显粗差。
(2) 控制网粗平差。平面控制网粗平差的目的是获得平面控制网的近似坐标,用于精密三角高程网严密平差,本次平差以TN05为已知点,TN05-TB01为已知方位,采用近似边长。
(3) 精密三角高程网平差。精密三角高程网平差以TN04高程为已知值,用平面近似坐标、近似边长和天顶距观测值为条件平差[15]。精密三角高程网平差后,获得了各测点的精确高程,即可对边长进行精确改正和归算。
(4) 平面控制网平差。控制网平差采用秩亏自由网平差法,利用科傻(COSA)软件,以TN05为固定点,TN05-TB01的方向為固定起算方向,按独立边角网计算。
表4列出了平差后各点位的精度指标,从表中可以看出所有点位的精度均很高,最弱点是TB04点,点位中误差为±1.4 mm,满足设计限差±2 mm的要求。全网最弱边是TB01-TB02,边长相对中误差为1/323 000。可以认为,本次平差结果均满足限差要求。
3 点位稳定性分析
3.1 平均间隙法
平均间隙法利用统计检验理论进行点位稳定性分析,将不同观测周期的观测数据看成是对同一观测网的连续两次观测[11],为了判断是否存在不稳定点,先进行两期观测的图形一致性检验,也就是整体检验。如果整体检验通过,则可以认为该网型中不存在不稳定点,否则,就说明存在不稳定点。为了找出不稳定点,该方法通过每次去掉一个点位,计算一次图形不一致性,然后将图形不一致性最大的点位视为不稳定点。在排除该点后,再计算图形一致性,若一致性通过则进一步验证了该点为不稳定点。具体计算方法如下:
某监测网完成第j期和第i期观测后,将两期观测数据按同一基准进行平差,求得网点位移向量和其协因数阵Qd。
根据点的坐标变化值d=Hj-Hi,进一步求得单位权方差估值:
2=dTPddfd(1)
式中:Pd为d的权阵,且Pd=Qd-1,fd为独立d的个数。
对单位权方差进行同一性检验,通过检验后,进一步求得综合方差估值:
μ2=VTPVi+VTPVfj(2)
式中:P为观测值改正数权矩阵,V为观测值改正数列矩阵,f为第i,j期多余观测总数。进一步可得:
T=2μ2(3)
式中:T是一个以自由度为f和fd的F分布变量。
在一致性检验中,若T<F(α,fd,f),则接受原假设,表明监测网点都是稳定的。反之,则认为网中存在不稳定的点。
接下来,采取分块间隙法寻找不稳定的点。将d和Pd分解为不稳定点与稳定点两部分
d=dMdF,Pd=PMPMFPFMPF(4)
式中:下标M,F分别表示动点与稳定点。令
dM=dM+P-1MPMFdFPF=PF-PFMP-1MPMF(5)
可得
dTPdd=dTMPMdM+dTFPFdF(6)
作统计量
FF=dTFPFdFfFμ20(7)
若FF≤F(fF,f0),认为上述分块是正确的。反之,说明上述分块是不正确的,稳定点的分块中还有动点。需要剔除其中位移量最大的点,然后重新进行上述检验,直到完全通过为止[12]。
3.2 单点位移分量法
单点位移分量法采用了巴尔达粗差探测理论。该方法认为在先验方差因子σ02已知的条件下,应先进行整体检验,整体检验的检验统计量如下:
T=dTPddσ20fd(8)
若T>F(α,fd,∞),则认为存在不稳定点[13],构造位移分量检验统计量如下:
ωi=eTiPddσ2eTiPdei(9)
式中:ei是一向量,以说明需要检验的i点在某一方向上的位移分量。若ωi>Fα,1,SymboleB@,则认为i点是动点。如果存在多个ωi满足式(8),则认为值最大的为动点,需要将它从监测网中剔除出去,然后重新进行检验,直到通过为止。
3.3 结果分析
基准网点位稳定性是基准网的关键,在控制网复测完成后,需要结合往期数据对基准点稳定性进行分析。为了确定点位是否存在位移,需要对本期(2022年10月)和上期(2021年10月)平差结果进行分析。首先使用平均间隙法做整体位移检验,以确定是否有位移存在,然后对各待定点的稳定性检验分别做两种检验,即动点检验和单点检验,检验过程中显著性水平α均取0.05,检验结果统计于表5。
从表5中可以看出,TN01点未通过动点检验,但通过了单点检验,该点的位移量较小(X方向为2.3 mm,Y方向为1 mm),其余点均通过了稳定性检验,没有明显位移变化。
4 結 论
本文以浙江省仙居抽水蓄能电站为例,对水电站控制网复测技术方法进行了介绍,在外业观测和内业处理中通过多种方式提高测量精度,相关技术方法可为相关工程应用提供参考。
(1) 基准网复测对精度要求极高,在外业观测时,水平角、边长和天顶距观测要分开进行,边长观测数据必须先进行投影归化、高程改化和斜距化平改正才能进行处理,除需要满足相关规范要求外,还要对外业观测数据进行四步预处理后,再进行平差处理。
(2) 点位平差时进行四步平差法可以有效提高数据处理精度,即先对观测值进行粗差检验和控制网粗平差后,再进行精密三角高程网平差和平面控制网平差。
(3) 点位稳定性分析能够判定点位位移究竟是测量误差引起的还是发生了实际的位移,先进行动点检验再进行单点检验法能够提高检验可靠性。
(4) 本次复测中,平面控制点中TN01点有微小水平位移,考虑到水电站大坝未进入稳定期,且位移方向是顺坡趋势,该点位位移在合理区间。建议后期按照相关规范要求进行定期监测,每年复测一次。
参考文献:
[1] 何可欣,马速良,马壮,等.储能技术发展态势及政策环境分析[J].分布式能源,2021,6(6):45-52.
[2] 路振刚,黄悦照,王洪玉,等.抽水蓄能及水电站项目群建设智慧管控系统总体构想[J].水电与抽水蓄能,2019,5(4):1-5.
[3] 李端有,叶斌,李波.高拱坝水垫塘运行期监测成果分析——以溪洛渡水电站为例[J].人民长江,2020,51(增2):329-333,379.
[4] 单海年.某抽蓄电站上水库主坝坝顶异常变形分析[J].人民黄河,2019,41(增2):128-130.
[5] 叶晓峰,周伟,马刚,等.基于反演参数的心墙堆石坝坝顶裂缝成因研究[J].武汉大学学报(工学版),2022,55(3):220-228.
[6] 苏培东,严磊,邱鹏,等.考虑水库岸坡特征的滑坡稳定性计算修正传递系数法[J].中国地质灾害与防治学报,2023,34(1):40-48.
[7] 李韧,杨久东,龚栎澎,等.监测网基准点稳定性检验方法与应用[J].华北理工大学学报(自然科学版),2020,42(4):56-60.
[8] 朱伟玺,唐小松,胡存宝.大型水电站枢纽区平面控制网复测及稳定性分析[C]∥中国大坝工程学会.水库大坝和水电站建设与运行管理新进展.北京:中国大坝工程学会,2022.
[9] 郭迎钢,李宗春,何华,等.变形监测网稳定点选取的平方型Msplit相似变换法[J].测绘学报,2020,49(11):1419-1429.
[10] 岳彩亚,党亚民,杨强,等.GNSS基准站网稳定性的误差椭圆法[J].测绘科学,2017,42(9):1-4,19.
[11] 徐益峰,袁豹.变形监测基准网稳定性分析方法研究——以苏州轨道交通4号线沿线国保单位变形监测为例[J].测绘通报,2019(增1):242-244,249.
[12] 葛文,何文峰,王英林,等.大坝平面变形控制网观测及稳定性分析[J].城市勘测,2018(2):123-127.
[13] 杨蕊.变形监测网平差基准的选择及点位稳定性分析[J].山西建筑,2019,45(3):204-206.
[14] 赵祥伟,陈正宇.一种基于粗差检验整体平差的周跳探测与修复方法[J].电力勘测设计,2022(7):48-52.
[15] 孙景领.精密三角高程测量在大坝外部垂直变形监测中的应用[J].水利与建筑工程学报,2012,10(4):35-37,73.
(编辑:江 文)
Point stability analysis and remeasurement of control network of hydropower station
CHEN Changyao
(Zhejiang Huadong Mapping And Engineering Safety Technology Co.,Ltd.,Hangzhou 310014,China)
Abstract:
Slide deformation monitoring of hydropower stations is vital to the safety operation of the project.The analysis of control network remeasurement and point stability analysis is the basis of deformation monitoring.Taking the Xianju pumping energy storage power station in Zhejiang Province as an example,the control network was remeasured and the point stability was analyzed.The horizontal corner,length of side,and sky-long observation technology and methods of the first-level corner network were introduced.Observation data were pre-processed by station adjustment calculation,horizontal angle error calculation,length observation results correction calculation,triangular elevation estimation,etc.The rough differences,rough flat difference between the control network,precision triangle high-profile mesh,and the flat control network level of observation data were tested to determine the measurement accuracy.The average gap method and single-point displacement component method were used to analyze the stability of the control point.The results showed that the technical method adopted in Xianju pumping energy storage power station can meet the national first-class triangular network accuracy indicators,and the control outlet position error and error elliptical can meet the accuracy requirements.Except for the TN01 point not passed the dynamic point inspection,the remaining points had all passed the stability test with no significant displacement.
Key words:
control network remeasurement; stability analysis; mean gap method; single point displacement component method
猜你喜欢
华中建筑(2022年4期)2022-04-14
小学生学习指导(中年级)(2021年10期)2021-11-01
装备制造技术(2021年4期)2021-08-05
现代测绘(2021年1期)2021-04-28
制造技术与机床(2018年12期)2018-12-23
数学小灵通·3-4年级(2017年12期)2018-01-23
测绘科学与工程(2016年4期)2016-04-17
中学数学杂志(高中版)(2015年3期)2015-05-28
化学分析计量(2013年3期)2013-03-11
全球定位系统(2010年2期)2010-07-18