基于激光扫描点云的脚手架杆件角度获取*
2024-02-26 08:50张雨鸣管东芝刘家彬
施工技术(中英文) 2024年2期
张雨鸣,管东芝,刘家彬
(东南大学土木工程学院,江苏 南京 211189)
0 引言
脚手架作为工程结构和施工人员在建造阶段的重要临时措施,可为作业人员提供操作平台,并保障工程结构在未成型阶段的安全。脚手架监测是保障其安全的重要措施,可有效减少施工事故,保证施工安全及进度[1-2],是降低脚手架安全事故发生概率的重要手段,受到了工程技术人员重视。
对于脚手架监测,大量学者和工程师开展了研究和工程应用。部分学者通过力传感器与位移传感器等对脚手架内力、变形和位移进行监测,确保其安全[3-6]。随着智能时代的到来,人工智能、物联网、云计算等智能分析技术被广泛应用于土木工程领域。少量学者利用三维激光扫描系统或双目相机,通过激光slam算法、卷积神经网络(CNN)、无迹卡尔曼滤波算法(UKF)等执行场景分割,并融合信息数据层与特征层,对脚手架进行特征与损伤识别[7-11]。当前对脚手架的监测主要有2类方法:①采用力、位移等常规传感器,监测脚手架关键部位内力、位移等变化量;②采用新兴设备和技术,包括三维激光扫描仪、激光雷达与计算机视觉相关技术等,监测脚手架变形。2类方法相比,前者技术比较成熟且应用广泛,但只能针对关键点位进行监测,监测效率和对脚手架整体监测的准确性有待提高;后者作为一种新兴技术,尚需进一步研究。
三维激光扫描技术突破了单点测量的局限,数据收集效率高,数据处理结果在可视化上有较大优势,可用于工程实施中的脚手架整体监测,有助于提高脚手架监测效率和整体准确性,但测试方法尚处于起步阶段,方法还不够成熟。
本文提出一种基于三维激光扫描点云数据的脚手架杆件角度获取方法,其对三维激光扫描得到的大量点云数据进行分析处理,提取选择范围内每根杆件圆柱体轴线方向向量,计算杆件方向向量间角度,可快速得到使用状态中的大规模脚手架杆件关键信息,并可进行杆件微小倾角的分析计算,为大规模脚手架变形监测奠定基础。
1 基于点云的脚手架杆件角度获取方法
脚手架是由细长杆件进行可靠连接而成,在发生坍塌事故前,往往会产生不可恢复的变形。利用三维激光扫描系统可获得整体脚手架模型,包含了所有单根杆件和连接节点的点云数据,数据量大,难以直接获得与脚手架安全相关的关键信息。因此,需基于脚手架特征,针对大量脚手架杆件点云数据进行处理计算。其中,脚手架杆件间的倾角是与脚手架坍塌事故紧密关联的关键指标,需引起重视。
考虑脚手架杆件及点云模型特点,基于点云的脚手架杆件角度获取方法如图1所示。主要步骤为:①利用三维激光扫描系统在不同位置对脚手架进行点云数据收集;②对获得的点云数据进行预处理,包括点云拼接、统计滤波及体素下采样,得到脚手架点云模型;③基于RANSAC算法拟合脚手架杆件圆柱体,得到杆件圆柱体方程与轴线方向向量;④计算杆件圆柱体轴线方向向量间的角度。
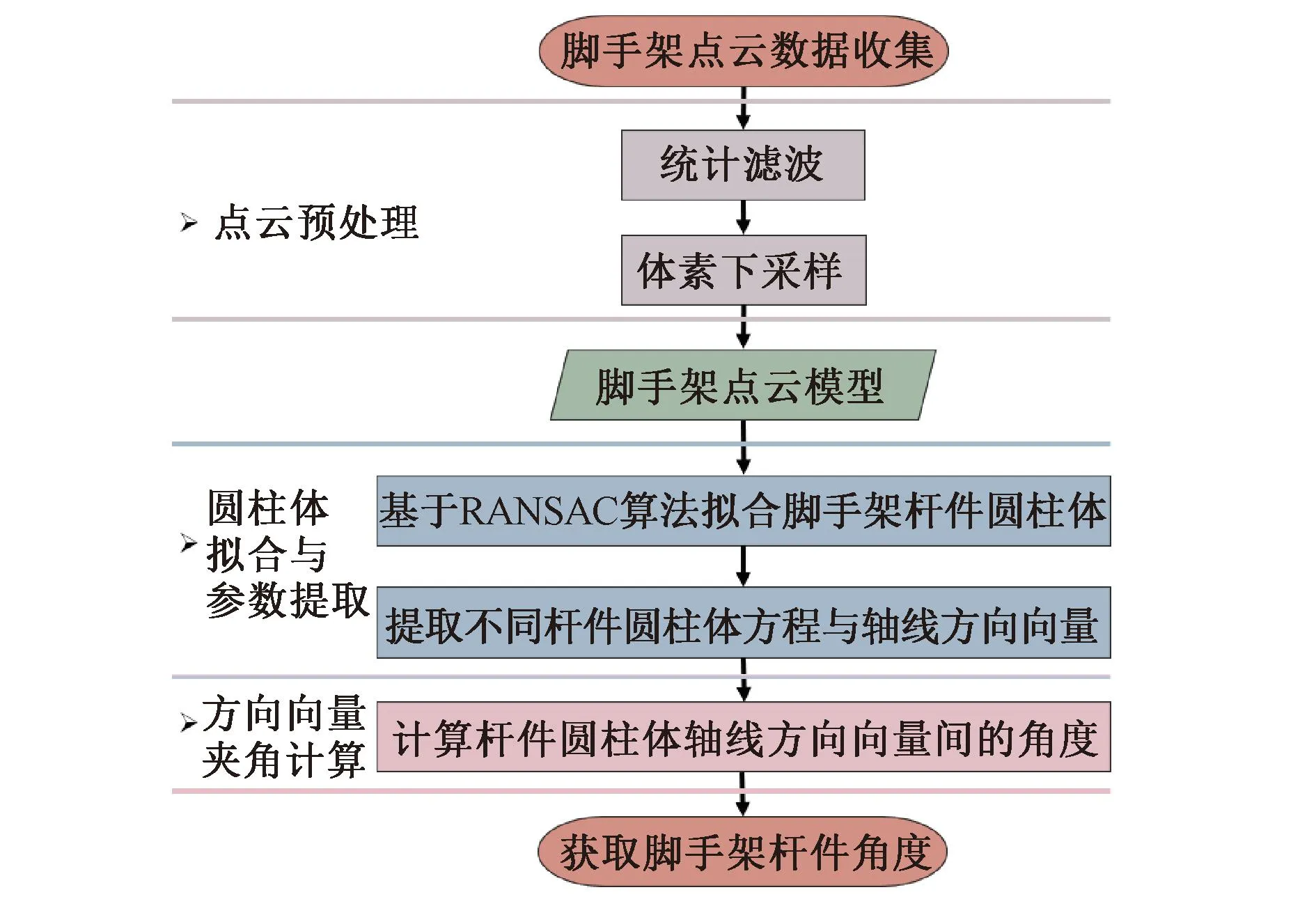
图1 基于点云的脚手架角度获取方法流程Fig.1 Scaffold rod angle acquisition method process based on point cloud
1.1 点云预处理
1.1.1点云滤波

(1)
式中:dij为点pi与其邻域内第j个点的距离。
1.1.2点云下采样
一般脚手架杆件特征明显,杆件点云较密集,可使用体素化网格方法实现下采样,在下采样的同时不会破坏点云自身几何结构,既可减少点的数量又能保存点云形状特征。首先将点云进行体素划分,然后计算非空体素的质心代替该体素内所有点,实现点云下采样。已知1个非空体素V,其中包含m个点,则该体素质心Pc(xc,yc,zc)坐标为所有点坐标的均值,如式(2)所示,其中V内任意一点为(xi,yi,zi),i∈[1,m]。
(2)
1.2 杆件圆柱体拟合和参数提取
传统拟合过程是利用大量数据获得一个较原始的解,然后通过优化算法消除无效数据点。脚手架点云数据量庞大且十分密集,若采用传统方法拟合和分割杆件圆柱体,无效数据点存在于大量数据中的概率较大,无法消除其对初始模型的显著影响。RANSAC算法可从较小数据集开始计算,较小数据集中含有无效数据点的概率较小,拟合的模型准确率较高,在设定的阈值下通过重复迭代可不断地使有效数据点符合拟合模型的参数,排除偏差在阈值以外的数据点,最终得到最优模型参数[13-15]。因此,采用RANSAC算法可提高杆件圆柱体拟合的可靠性,并得到较为准确的模型参数。
1.2.1参数设置
对于RANSAC算法,较重要的2个参数分别为随机选择的点数n、重复迭代的次数k。假设每个点为内点的概率为w,计算如式(3)所示。假设RANSAC算法重复迭代k次后成功的概率为p,可通过式(4),(5)计算出需重复迭代的次数。其中,wn为随机选择的n个点均为内点的概率;1-wn为随机选择的n个点至少有1个不是内点的概率;(1-wn)k为重复迭代k次后依然至少有1个点不是内点的概率。
(3)
1-p=(1-wn)k
(4)
(5)
1.2.2杆件圆柱体拟合
从脚手架点云数据中随机选择1组包含部分圆柱体点的数据集,根据这组数据拟合1个圆柱体模型,然后计算其他所有数据点到该模型的距离,根据所设距离阈值,将所有数据点分为内点和外点。当内点数量大于所设内点数量阈值时,将该组数据视为符合圆柱体模型的数据,并拟合得到圆柱体模型。在其他数据点中重新随机选择1组包含部分圆柱体点的数据,重复上述过程,直至获得足够多圆柱体模型数据[16]。最后将所有符合圆柱体模型的数据合并,计算得到最终正确圆柱体模型。
1.2.3圆柱体参数提取
当脚手架点云模型包含的数据经RANSAC算法分割出各杆件圆柱体后,分割得到的各杆件圆柱体参数也可随之计算得出。圆柱体方程可用式(6)表达。
(x-x0)2+(y-y0)2+(z-z0)2-r2=
(6)
圆柱体上任意点为P(x,y,z),圆柱轴线上的点为P0(x0,y0,z0),轴线方向向量s=(l,m,n),圆柱半径为r(见图2)。当各杆件圆柱体基于RANSAC算法分割并拟合成功后,针对各杆件可得到其唯一的圆柱体方程,并确定上述7个关键的圆柱体方程参数。
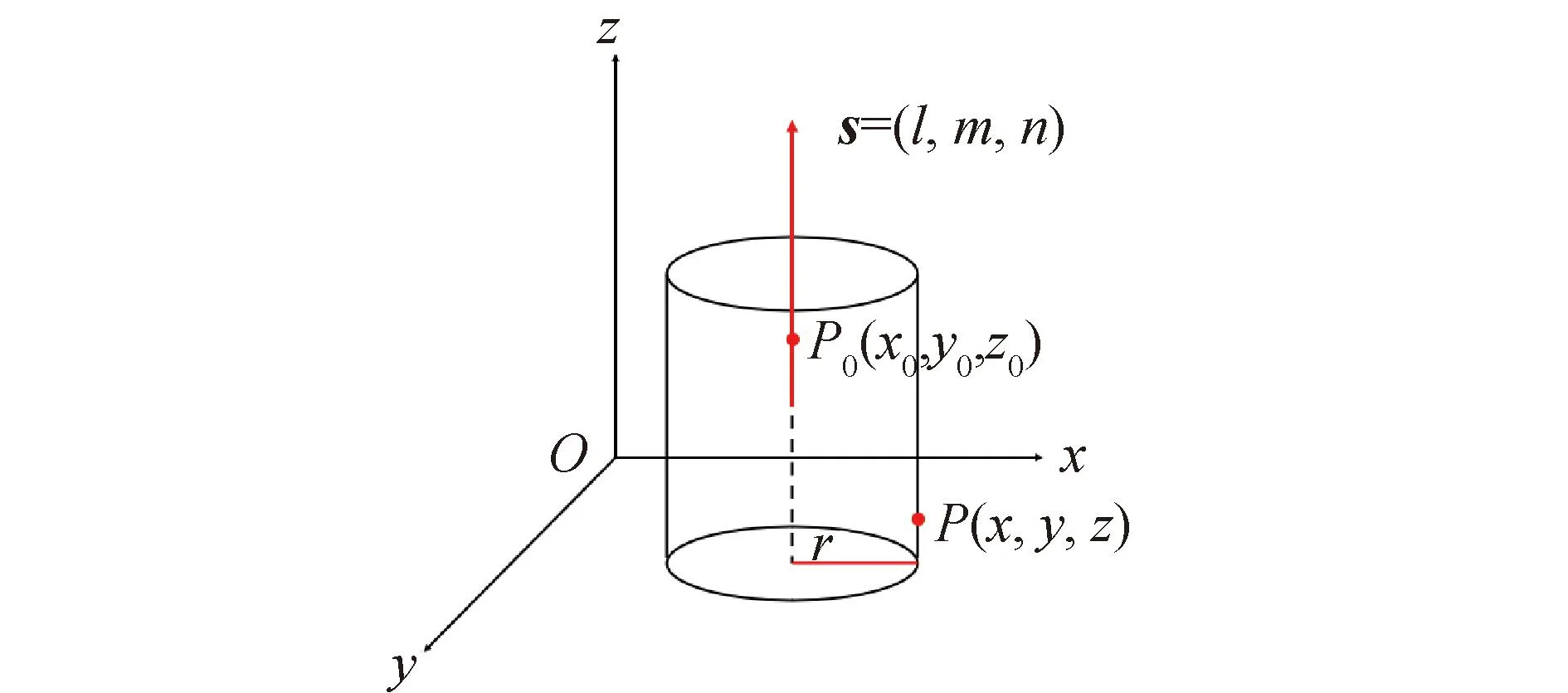
图2 圆柱体空间几何示意Fig.2 Cylindrical space geometry
1.3 轴线方向向量夹角计算
获得各杆件包含圆柱体轴线方向向量在内的圆柱体方程参数后,计算杆件圆柱体轴线方向向量间的夹角。将任意2根杆件圆柱体轴线方向向量定义为a,b,其方向向量夹角为θ,方向向量夹角计算如式(7),(8)所示,当夹角发生明显变化时,可据此掌握脚手架杆件变形程度并进行安全评估。
(7)
(8)
2 实例分析与应用
2.1 脚手架点云数据获取
采用Trimble X7三维激光扫描仪,扫描仪位于南京市栖霞区和燕路的在建高架桥盘扣式支撑脚手架,如图3a所示。该对象为B型盘扣式脚手架[17],立杆直径48.3mm、水平杆直径42.0mm、斜杆直径33mm,步高1.5m、步距1.2m,如图3b,3c所示。为方便后续较为直观地观察,通过旋转点云模型使其与坐标轴对齐。

图3 脚手架点云数据收集Fig.3 Scaffold point cloud data collection
2.2 脚手架点云预处理
2.2.1点云统计滤波

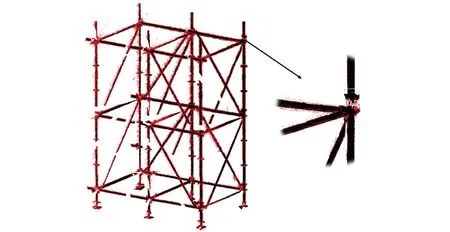
图4 统计滤波效果Fig.4 The statistical filtering effect
2.2.2点云体素质心下采样
进行体素质心下采样时,采用参数为0.01的体素设置滤波器进行处理,即体素的长、宽、高均为0.01m,每个体素内点为5个,减少点的数量,并保存点云形状特征。体素质心下采样结果如图5所示。
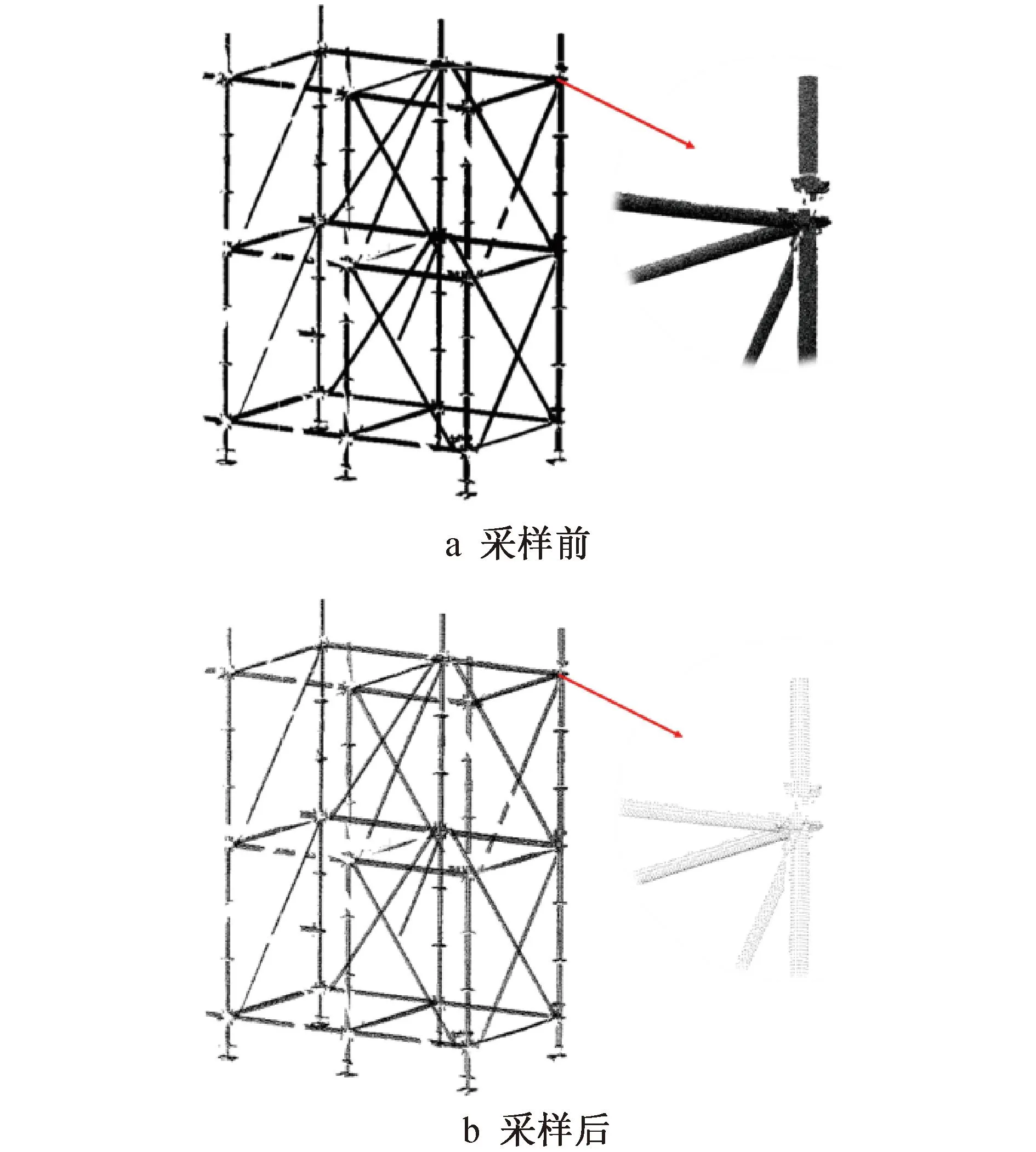
图5 体素质心下采样结果Fig.5 Results of physical quality cardiac sampling
2.3 基于RANSAC算法分割脚手架各杆件圆柱体
通过调用PCL库(Point Cloud Library 开源C++编程库)的SACMODEL CYLINDER(圆柱体)模型设置7个参数,如表1所示,采用RANSAC算法对脚手架点云进行最佳拟合。

表1 模型参数意义Table 1 The model parameter meaning
利用该模型设置邻近搜索值k=100,距离阈值为0.1m,圆柱拟合点云最小点数为1 500。根据脚手架参数,在算法中设置圆柱半径最小值为0.01m、最大值为0.03m,获取各圆柱体内点。如果内点数量大于最小点数,则保存提取结果,否则结束提取。对于外点将继续执行算法,若剩余点个数不满足分割要求的最小点数,则结束分割,退出算法循环。杆件圆柱体拟合效果如图6所示,不同颜色代表不同杆件。
2.4 基于RANSAC算法提取圆柱体参数
经过杆件圆柱体分割后,RANSAC算法自动算出圆柱体方程及表1中的7个关键参数,并将分割得到的圆柱体点云中不满足圆柱体方程的点自动过滤。以1根立杆为例,如图7所示,红色点云为过滤部分,提取出的轴线如图8所示。

图7 过滤前后对比效果Fig.7 Comparison effect before and after filtering
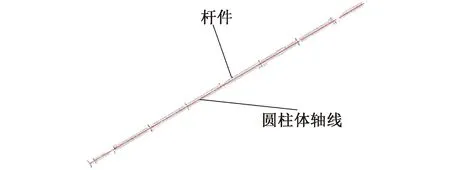
图8 杆件圆柱体轴线提取效果Fig.8 The extraction effect of the axis of the rod cylinder
为方便研究,选择部分杆件进行编号,如图9所示,其中杆件0包括通过连接套筒连接的1,2两根杆。选择的杆件圆柱体轴线方向向量如表2所示。

表2 选择的杆件圆柱体轴线方向向量Table 2 The axis direction vector of the selected rods
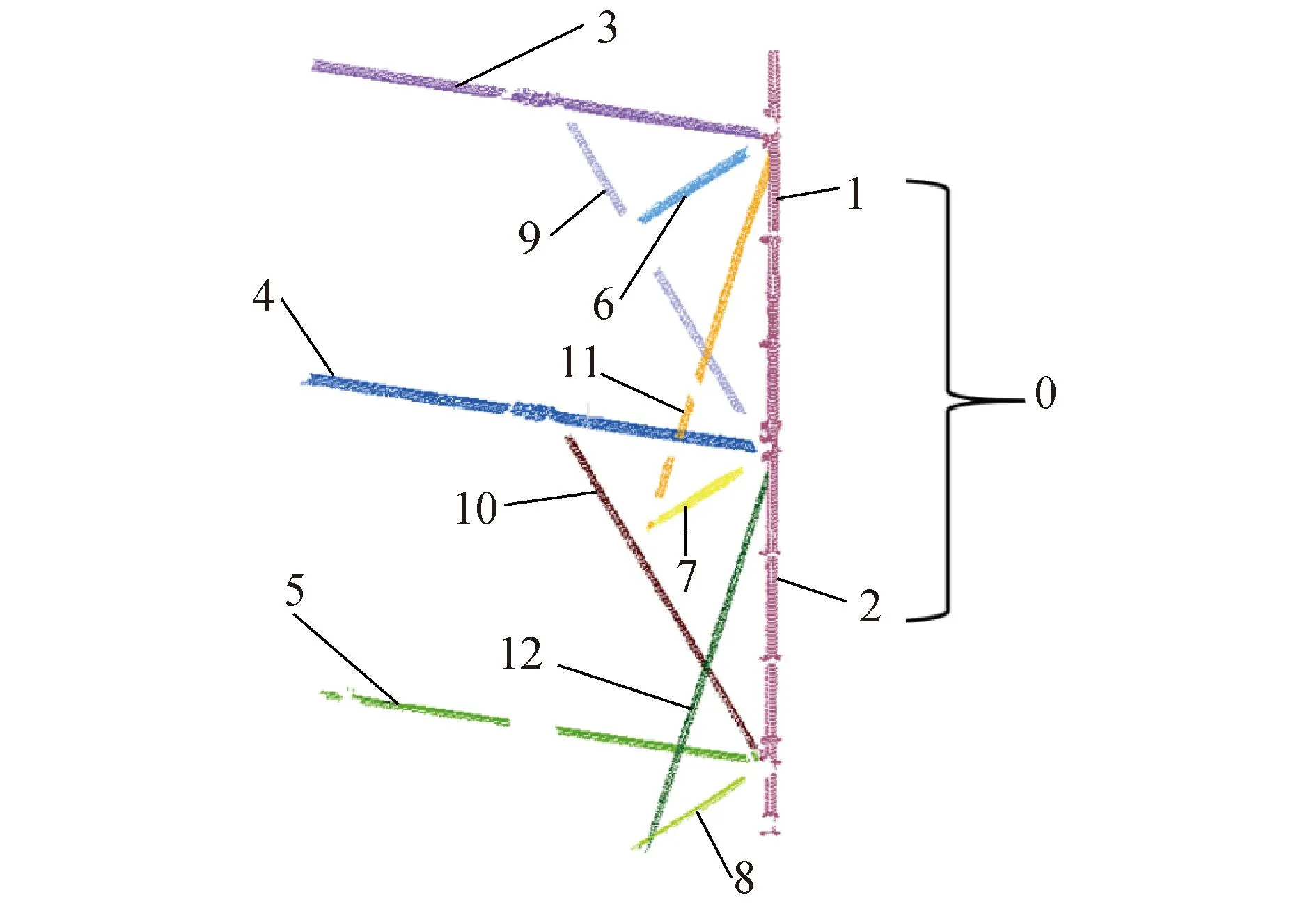
图9 选择的杆件编号Fig.9 Number of the selected rods
2.5 角度计算
由于脚手架中横杆和立杆为主要承力单元,斜杆主要起增强稳定性作用,故计算立杆轴线方向向量与1~8号杆件圆柱体方向向量间的角度及上、下2根杆件轴线方向向量夹角。杆件3~8角度计算结果如表3所示;杆件1,2方向向量间夹角为 0.614 7°, 理论值为0°。

表3 杆件3~8角度计算结果及变化Table 3 The calculation results and changes of the angle of the No.3 ~ No.8 rods
当该脚手架未发生变形时,理想情况下:3~8号杆件与已选带连接套筒的0号立杆的圆柱体轴线方向向量夹角为90°;9,10号杆件作为边长分别为1,1.5m的对角线斜杆,其方向向量与0号杆件夹角为arctan(1/1.5)=33.69°;11,12号杆件作为边长均为1.5m的对角线斜杆,其方向向量与0号杆件夹角为45°;1,2号杆件轴线方向向量夹角近似0°。由计算可知,1,2号杆件已相互变形 0.614 2°, 8号杆件变形0.759 8°(见表3),变形较接近理想情况。需特别注意并密切监视其更大程度的动态变形, 若出现某个角度变化较大的问题,即刻引起重视。
3 精度验证
为验证该方法的可靠性,将2.2节中已采样的脚手架点云模型分别围绕某一轴与某一点进行不同理论角度的旋转,采用第2节方法得到旋转后脚手架轴线和方向向量,计算旋转后杆件模型与初始模型圆柱体轴线方向向量间的夹角,并与初始旋转夹角作比较,检验该方法的精度。
旋转分为6种情况,分别为:围绕脚手架右纵轴旋转3°,5°,7°,为轴旋转,如图10所示;依次围绕脚手架右纵轴与后横轴旋转3°,5°,7°,为中心旋转。通过三棱锥顶角公式计算可知,旋转后脚手架实际中心旋转角度分别为4.242 0°,7.073 6°,9.905 0°,如图11所示。

图10 脚手架点云轴旋转Fig.10 Axial rotation of scaffold point clouds
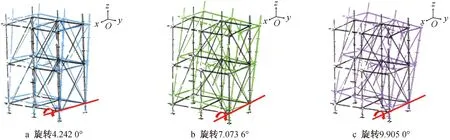
图11 脚手架点云中心旋转Fig.11 Central rotation of scaffold point clouds
以1根立杆为例,如图12所示,轴旋转与中心旋转的圆柱体轴线方向向量夹角计算结果如表4所示。其中,最大相对误差为1.25%,平均相对误差为0.75%,说明若脚手架发生倾斜,本文提出的方法可较为便捷地得到倾斜角度,从而进一步明确安全风险。
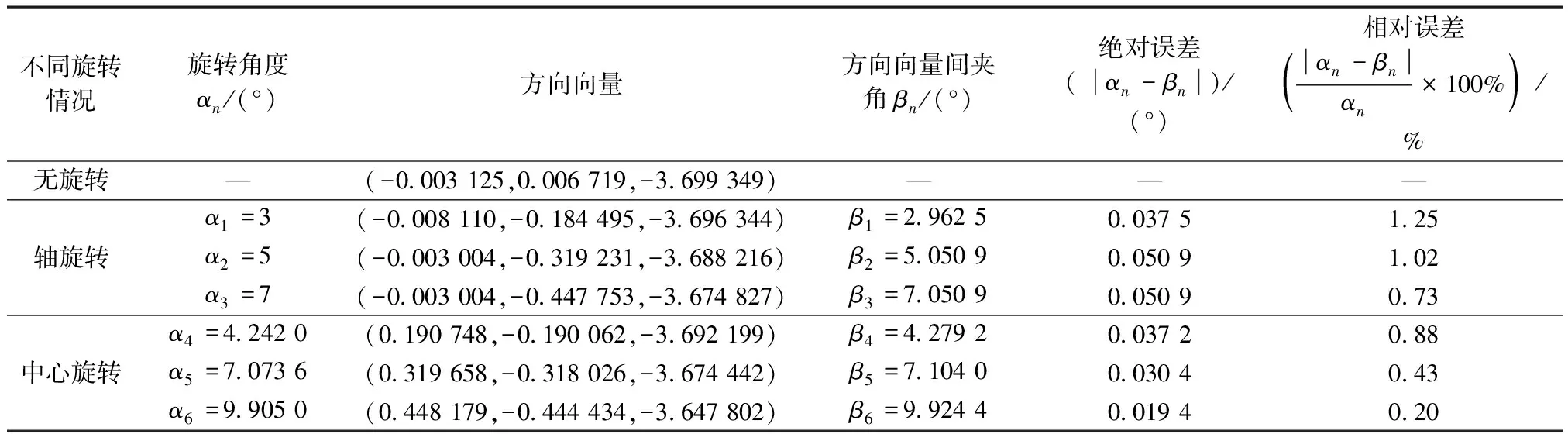
表4 示例杆在不同旋转情况下轴线方向向量夹角Table 4 Angles between the axis direction vector for an example rod and the same rod under different rotations
图12 示例立杆Fig.12 Example rod
4 结语
本文提出一种基于三维激光扫描点云的脚手架杆件角度获取方法,即对收集到的脚手架点云数据进行统计滤波、体素质心下采样的预处理后,基于RANSAC算法拟合脚手架杆件圆柱体并提取圆柱体轴线,得到圆柱体轴线方向向量并计算方向向量间夹角,为大规模脚手架变形监测奠定基础。经验证,本文所提方法最大相对误差为1.25%,平均相对误差为0.75%,且能快速、有效地计算出脚手架各杆件夹角,为脚手架变形监测提供了新思路。
为方便试验,本文试验对象脚手架规模较小,通过算法计算较快。如应用于实际施工现场中大面积脚手架,可在其中布置显著标识,如粘贴示意牌,以达到将整体脚手架结构分区处理的目的,最后通过显著标识将分区脚手架结构整合以观察全局变形,提高本文所提出方法的适用性。
猜你喜欢
振动与冲击(2022年1期)2022-01-27
四川建筑(2021年1期)2021-03-31
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
语数外学习·高中版上旬(2020年8期)2020-09-10
建筑机械化(2020年7期)2020-08-15
西南石油大学学报(自然科学版)(2018年4期)2018-08-02
科技创新与品牌(2016年8期)2016-09-29
娃娃画报(2016年6期)2016-07-29
广西电力(2016年5期)2016-07-10
中学生数理化·八年级数学人教版(2016年3期)2016-04-13