
无人机光学侦察载荷地面分辨力评估方法
2024-02-26 08:00张宏刚王亚莉张仕超
电光与控制 2024年2期
张宏刚, 林 刚, 王亚莉, 王 睿, 张仕超
(中国飞行试验研究院,西安 710000)
0 引言
随着无人机技术与光电技术的发展,可见光、红外、多光谱波段等无人机侦察载荷发展日新月异,在各类大型军用无人机上的应用尤为突出。侦察无人机在战争中的作用越来越显著,甚至能够完成有人机无法完成的特殊任务。近年来,大型军用侦察无人机已成为各个军事强国武器装备发展的重点。地面分辨力是体现无人机侦察能力的核心性能指标,即侦察任务载荷对地分辨能力,在很大程度上决定了大型军用无人机侦察与情报获取效能,是侦察载荷侦察能力优劣的最终体现。而光学侦察载荷种类不同,各载荷对地分辨能力的要求与表述就不同,相应的测试方法也存在差异。正是侦察载荷种类多、地面分辨力表述各异、相应的性能指标要求不同等因素,增大了对地面分辨力性能指标的定量测试与评价的难度。
1 国内外技术发展现状
1.1 国外技术发展现状
国外无人机发展较早,相应的光学侦察任务载荷研制较为成熟,性能指标也较为先进。当今,以色列和美国在无人侦察机的发展规模和技术水平方面处于领先地位。美国“全球鹰”无人机上配装的光电系统为第三代红外传感器和光电传感器(CCD),光电传感器工作在0.4~0.8 μm波段,红外传感器在3.6~5 μm波段[1],可分辨温差达0.1 ℃,在20 000 m高空能够准确识别地面的各种飞机、导弹和车辆的类型。 “暗星”无人机采用了12 064像素的CCD线阵,具有较高的分辨能力,可实现0.6 m的分辨率[2]。“捕食者”无人机配装有前视红外传感器、昼用摄像机和新型的超光谱相机,获取高清晰侦察图像的同时,也可以辨别伪装网和簇叶,甚至能分析出坦克涂料和燃料的化学特征。各类侦察载荷可根据任务需求,采用合理组合搭配方式,以提高无人机的综合侦察能力。
1.2 国内技术发展现状
国内无人机虽发展较晚,但近几年我国的无人机技术也达到了国际先进水平,“翼龙”、“彩虹”等系列大型无人机都具有较强的综合侦察能力。这几型无人机配装有多种光学侦察载荷,能够对地面目标进行搜索、识别和跟踪,为激光制导导弹提供目标指示信息,可以获取可见光、红外、多光谱侦察图像数据,采用临空垂直侦察和远距倾斜侦察两种搭配方式实施侦察,具备全天候侦察能力,能够获取高清晰、高分辨率侦察图像信息。无人机飞行高度与对地侦察分辨能力达到了国外同类技术水平。
2 光学侦察载荷成像机理与特点
2.1 可见光侦察相机
2.1.1 成像机理
可见光侦察相机成像机理如图1所示。
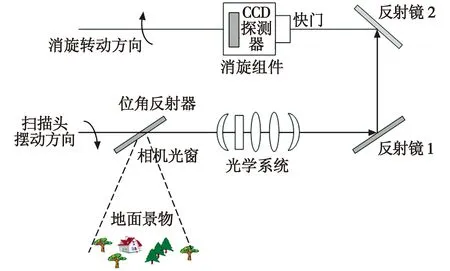
图1 可见光侦察相机成像机理示意图Fig.1 Schematic diagram of working principle of visible light reconnaissance camera
无人机在侦察区域飞行时,地面景物光线进入可见光侦察相机光窗,通过位角反射镜和光学系统后,经多个反射镜反射,将地面景物影像成像在焦平面组件CCD上。俯角控制系统驱动俯角电机带动扫描头和消旋组件同步转动,实现对地面景物的横向扫描成像。垂直侦察时,相机往返重复扫描,扫描方向与无人机飞行方向垂直,对地面垂直飞行方向上的一个条带区域进行成像;倾斜侦察时,沿飞机飞行方向以一定固定角度自右向左摆扫,实现对地面景物扫描成像。
2.1.2 成像特点
这类相机成像特点是通过临空垂直或远距倾斜侦察,获取无人机飞行航线下方或侧方的高清晰、高分辨率可见光侦察图像。地面分辨力在光学侦察载荷中最高,通常以地面分辨力性能指标来表征对地分辨能力。
2.2 多光谱侦察相机
2.2.1 成像机理
多光谱侦察相机成像机理如图2所示。
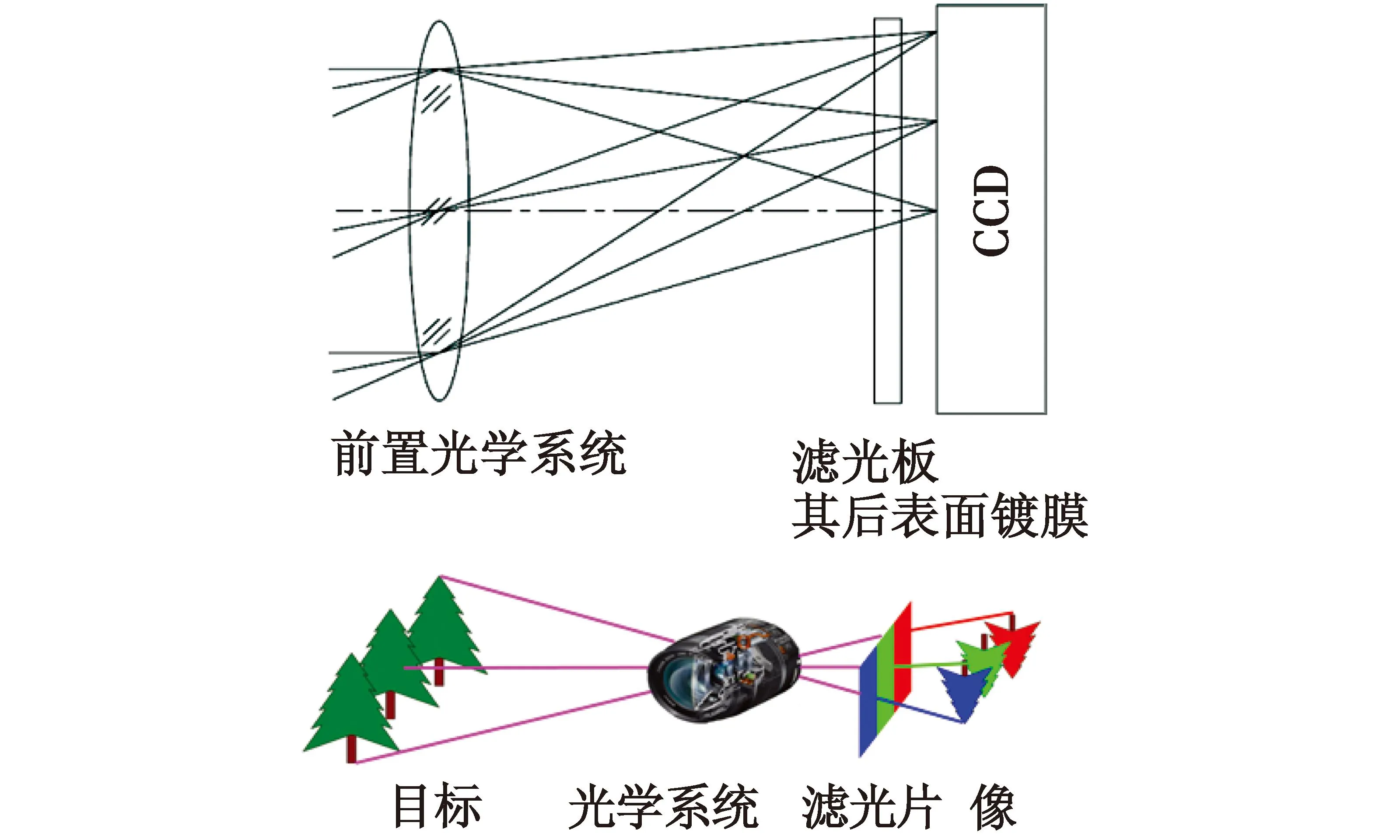
图2 多光谱侦察相机成像机理示意图Fig.2 Schematic diagram of working principle of multispectral light reconnaissance camera
多光谱侦察相机采用滤光片原理,在相机系统中加入一个滤光板,滤光板放置在CCD探测器前方,在滤光板上沿着垂直于飞行的方向放置多条窄带滤光片,每个带通滤光膜只能通过一个谱段的图像,多波段光谱相机以小画幅方式工作。面阵探测器的若干行像元对应一个光谱带,则整个面阵探测器对应若干光谱带,每次拍照获得某一区域目标的二维空间信息和某一特定光谱带的光谱信息。通过无人机飞行实现空间维的推扫,从而获得目标的完整数据[3]。
2.2.2 成像特点
多波段光谱侦察相机成像特点是不仅能呈现二维的侦察图像,而且能给出侦察目标的光谱曲线。结合相关光谱数据库就能够分辨出真假目标,达到一定的揭伪能力。该相机的地面分辨力在光学侦察载荷中偏高,通常以像元分辨力性能指标来表征对地分辨能力。
2.3 红外行扫仪
2.3.1 成像机理
红外行扫仪成像机理如图3所示。红外行扫仪是利用红外探测器、光学成像物镜接收侦察区域目标的红外辐射信号,获取红外侦察图像。红外光学系统与红外探测器组件一起安装在光机结构内,在摆扫伺服机构的驱动下,在垂直于飞行方向上做双向扫描运动,从而通过红外探测器形成连续的扫描图像。
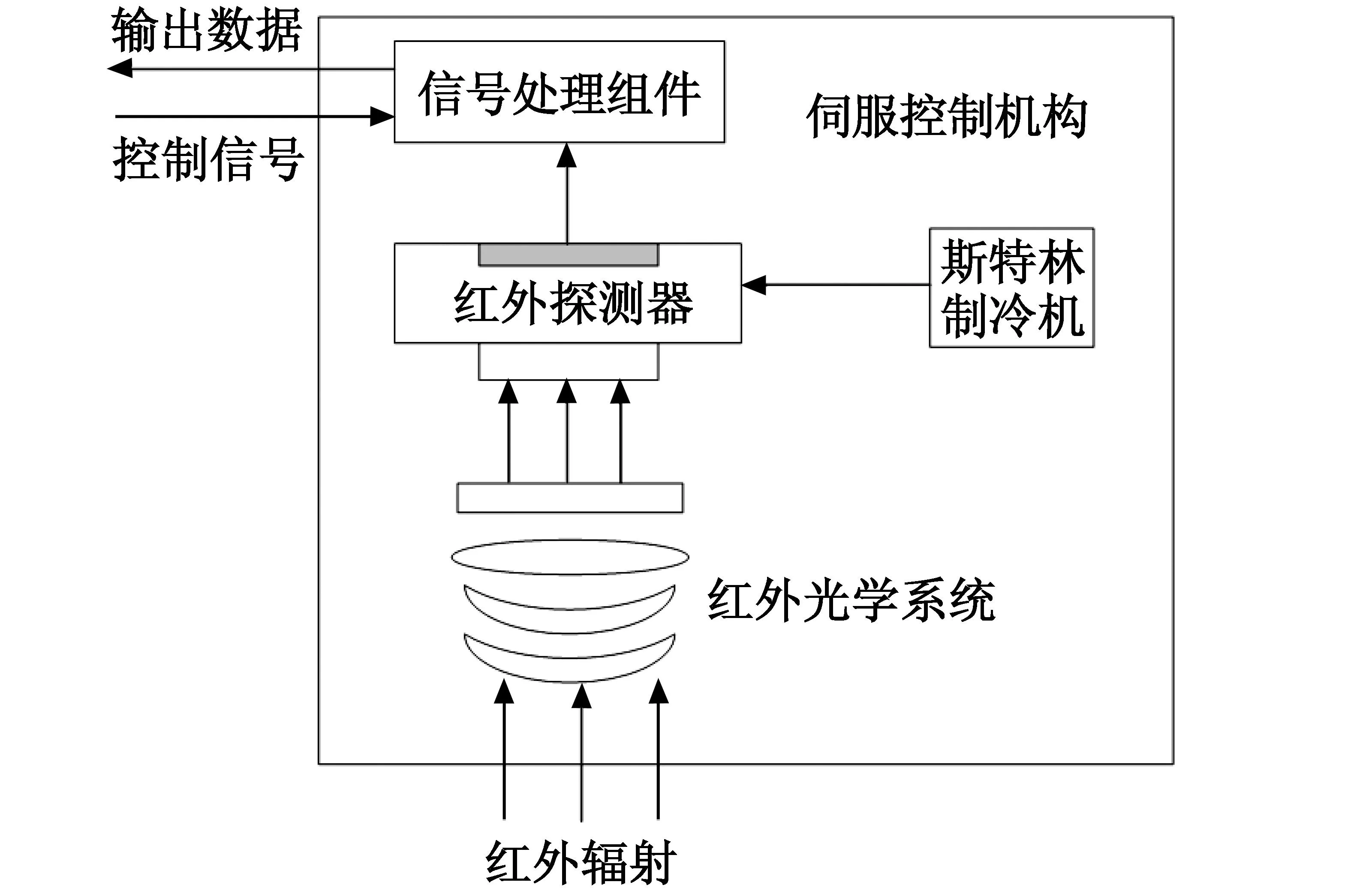
图3 红外行扫仪成像机理示意图Fig.3 Schematic diagram of imaging principle of infrared line scanner
2.3.2 成像特点
红外行扫仪成像特点是能够获取目标区域红外侦察图像,具备全天候侦察能力。但其地面分辨力在光学侦察载荷中偏低,通常以瞬时视场性能指标来表征对地分辨能力[4]。
3 靶标设计与试飞方法
3.1 等效地面分辨力性能指标换算
根据工作原理与使用特点,不同光学侦察载荷对地分辨能力表述方式有所不同。可见光侦察相机一般用地面分辨力来表征,即在一定拍照侦察距离条件下获取的侦察影像上能分辨的最小线对宽所对应的地面宽度,如地面分辨力为1.0 m,表示侦察影像上可分辨的线对宽度所对应的地面宽度为1.0 m;多光谱侦察类相机一般用地面像元分辨力来表征,即相机在一定拍照侦察距离条件下一个像元成像对应的地面长度;红外行扫仪一般用瞬时视场来表征,即一个像元成像对应的视场角度。地面像元分辨力与瞬时视场定义如图4所示。

图4 地面像元分辨力和瞬时视场定义示意图Fig.4 Definition of ground pixel resolution and instantaneous field
在实际飞行试验中,无法直接测量或考核地面像元分辨力和瞬时视场这两项性能指标,为了能够从工程实际应用中对其进行测试与评估,首先需要将其等效成地面分辨力性能指标,通过考核对应的地面分辨力性能指标来等效评估。由实际工程经验可知,3条相邻黑白条纹在探测器上所成像至少占3个,才有可能被分辨出黑白条纹。因此,地面像元分辨力等效地面分辨力算式为
D=3×d
(1)
式中:D为对应的地面分辨力;d为地面像元分辨力。
瞬时视场等效地面分辨力算式为
D=3×L×θ
(2)
式中:L为拍照侦察目标距离;θ为瞬时视场。
3.2 地面分辨力测试靶标设计
在飞行试验中,通过设计不同类型地面分辨力测试靶标来考核该项性能指标是否达到设计要求。主要依据地面分辨力数值大小,考虑靶标制作与布设难易程度等因素设计合适的地面分辨力测试靶标。地面分辨力测试靶标一般设计黑白条纹靶标,通过判别黑白条纹是否具备分离趋势来测定地面分辨力。具体设计思路与方法如下。
1) 摆放方式。一种方式是“三横三竖”摆放,即每2个三线条纹组相互垂直摆放,组合成一组“三横三竖”条纹图案,由多组条纹图案组成。另一种方式是“成45°夹角”摆放,即每组由4个三线条纹宽度相等的三线条纹拼成,三线条纹两两组成45°夹角,由4组条纹图案分布于4个象限组成。“三横三竖”条纹靶标和“成45°夹角”条纹靶标如图5所示。
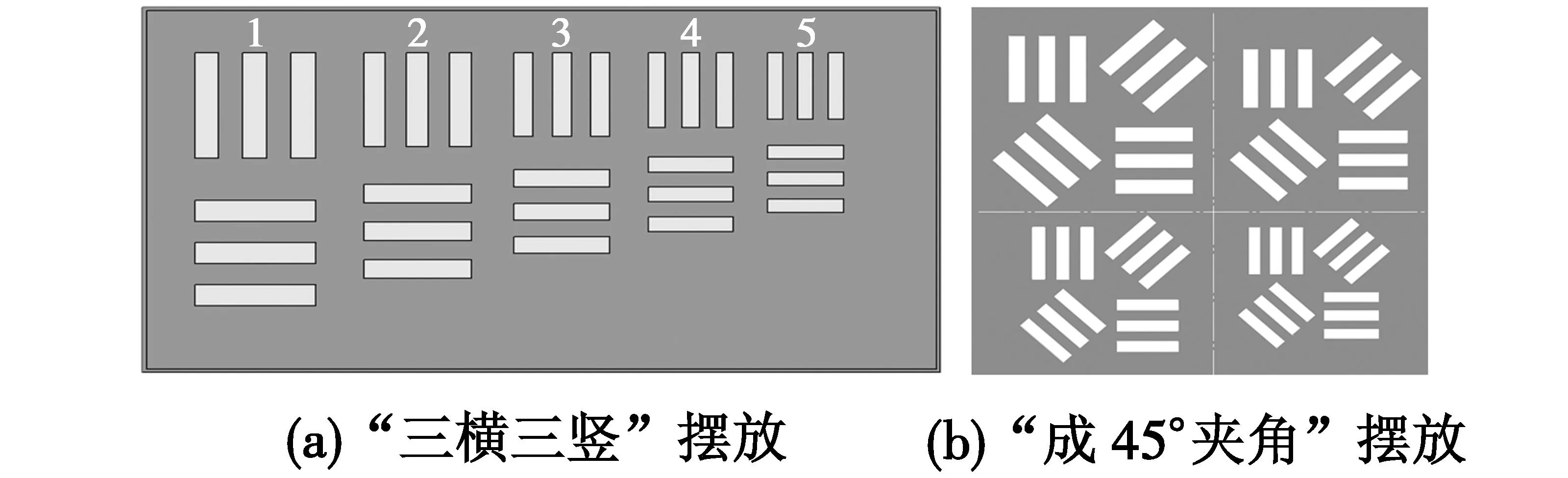
图5 地面分辨力测试靶标Fig.5 Ground resolution test targets
2) 在每组三线条纹中,一对黑白条纹宽度对应一个地面分辨力测试值(单位:m),条纹长宽比为5∶1,最大三线条纹组的条纹宽度一般应大于被考核的光学侦察载荷地面分辨力的1.5倍。

4) 大部分地面目标对可见光的最高反射率约为60%,在靶标设计时,将测试三线条纹组反射率选定为65%,背景反射率则根据对比度要求计算确定,黑白条纹的对比度一般采用8∶1或16∶1[5]。
5) 针对红外行扫仪,黑白条纹温差一般选择3~5 ℃。
3.3 航线规划与靶标布设
3.3.1 临空垂直侦察方式
针对垂直拍照侦察相机飞行试验规划航线时,需要考虑靶标铺设区域、太阳高度角、飞行姿态等因素,确保无人机飞临靶标上空时能够拍摄到靶标侦察图像。因此,在飞行航线正下方选择无阴影遮挡、相对平坦、自然光反射均匀区域水平铺设地面分辨力测试靶标,靶面长边方向与飞行方向保持平行,靶面朝上。临空垂直侦察方式靶标布设如图6所示。
1.2 检查方法 术前所有病例均进行常规检查视力、屈光状态、眼位和眼球运动。手术前后检查九个方位斜视角及向上25°和向下25°注视的斜视角;三棱镜遮盖法检查远、近斜视角;被动牵拉试验判断有无限制因素存在;眼底照相检查眼球旋转情况。5个病例的水平斜视均≤-50△。术前眼球运动及术中上斜肌减弱术具体见图1-3。
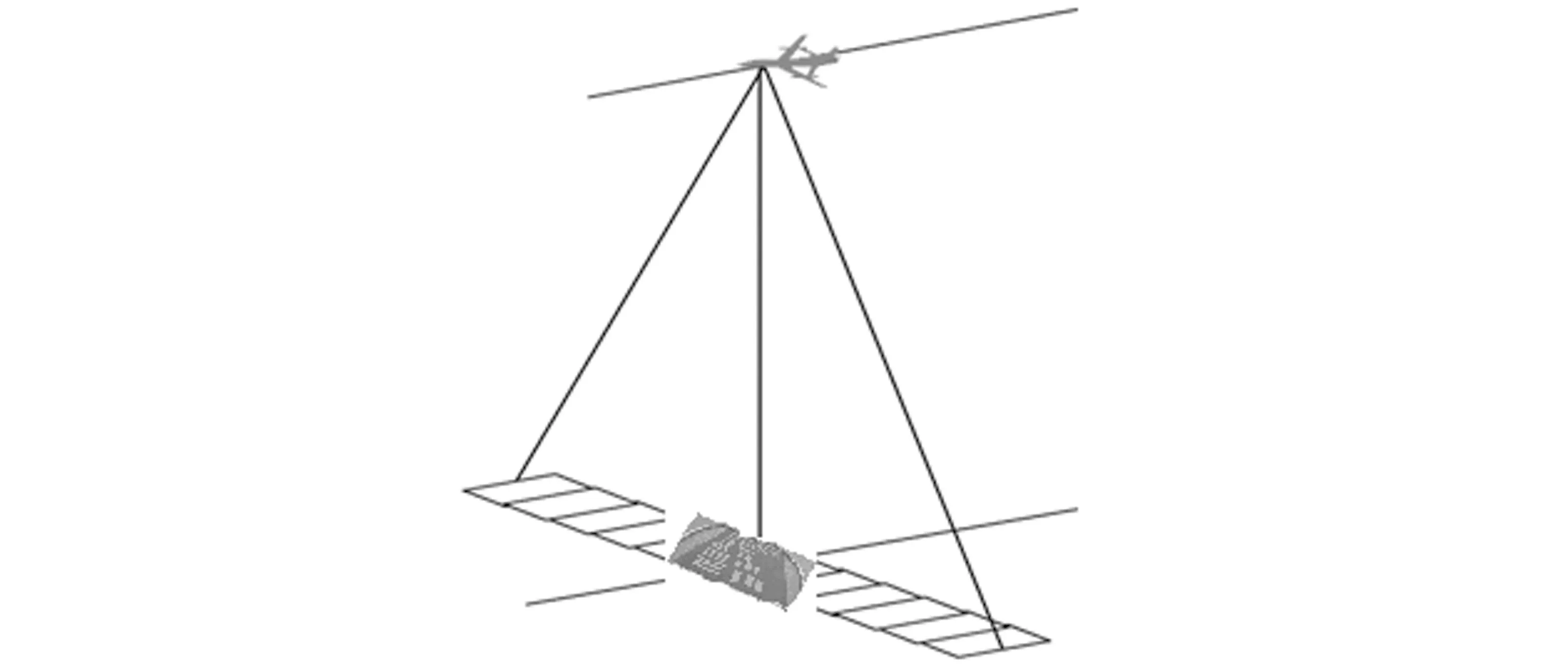
图6 临空垂直侦察方式靶标布设示意图Fig.6 Target layout diagram of aerial vertical reconnaissance
3.3.2 远距倾斜侦察方式
与临空垂直侦察方式相比,远距倾斜侦察方式下,无人机能够远离目标区域实施侦察,有效回避敌方火力攻击,提高生存力。规划航线时,需要考虑目标距离、太阳高度角、飞行姿态、链路传输带宽等因素。由于拍照方式为倾斜侦察,同时,为了确保靶标正面与侦察相机视向基本垂直,地面分辨力测试靶标需要倾斜架设放置。在飞行航线侧下方,选择无阴影遮挡、相对平坦、自然光反射均匀区域架设地面分辨力测试靶标,靶面与水平面成一定夹角,朝向无人机方向。在实际飞行中,一般要求考核的目标距离都比较大,受气象条件限制较多,较难实施。针对此问题,采取在不同距离上增设靶标的方法,通过考核相机对不同目标距离的靶标的分辨能力来验证相机地面分辨力性能指标,减少受气象条件限制的影响。远距倾斜侦察方式靶标布设如图7所示。

图7 远距倾斜侦察方式靶标布设示意图Fig.7 Target layout diagram of remote tilted reconnaissance
4 评估方法与试验结果
4.1 评估方法
4.1.1 直观评估方法
光学侦察载荷对地分辨能力直观评估方法是在获取一定数量地面分辨力测试靶标图像样本的基础上,由若干图像判读人员对图像样本进行直观评判,确定光学侦察任务载荷对地分辨能力。在实际飞行试验中,靶标图像样本一般不少于10幅,图像判读人员一般不少于5人。图像判读人员对选取的各靶标图像样本进行独立判读,选出每幅图像样本中能够分辨的条纹宽度最小的一组靶标图案,读取其分辨力数值。汇集各判读人员判读数值,选取全体判读人员在所有判读数据中不低于50%分辨概率的判读数值,该数值即为光学侦察载荷对地分辨能力评估结果。
4.1.2 定量评估方法
光学侦察载荷对地分辨能力定量评估方法是基于图像处理技术,对每个地面分辨力侦察图像样本进行处理分析,提取测试靶标影像区域每个像素的灰度值,比较暗条纹区域与亮条纹区域的灰度值比值,设定一定比值阈值[6],通过判断阈值,选取具备分辨趋势的最小三线条纹图案对应的分辨率数值作为本样本的地面分辨力测试值。地面分辨力定量评估计算流程如图8所示。
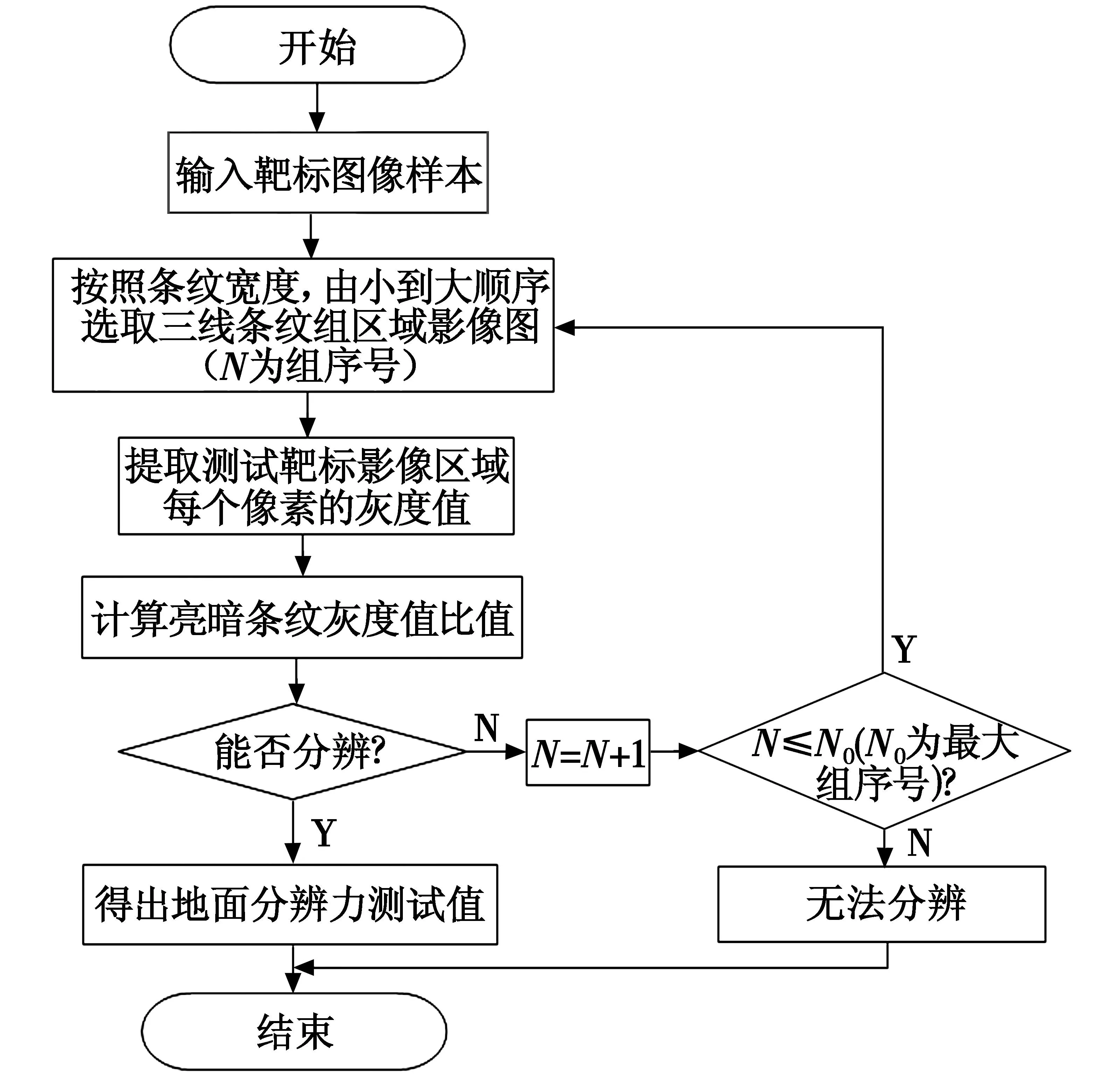
图8 地面分辨力定量评估计算流程图Fig.8 Calculation flow chart of ground resolution quantitative evaluation
4.2 试验结果
在大型无人机多型光学侦察载荷飞行试验中,设计并制作了不同类型地面分辨力测试靶标,采用临空垂直或远距倾斜侦察方式,对可见光、红外、多光谱等类型光学侦察载荷的对地分辨能力进行了测试。针对同一类光学侦察载荷地面分辨力验证,均采用了直观与定量两种评估方法进行了数据处理与分析,两种评估结果一致,能够对光学侦察载荷对地分辨能力进行科学、合理、准确的评估与验证。地面分辨力直观与定量评估图像样本如图9所示。
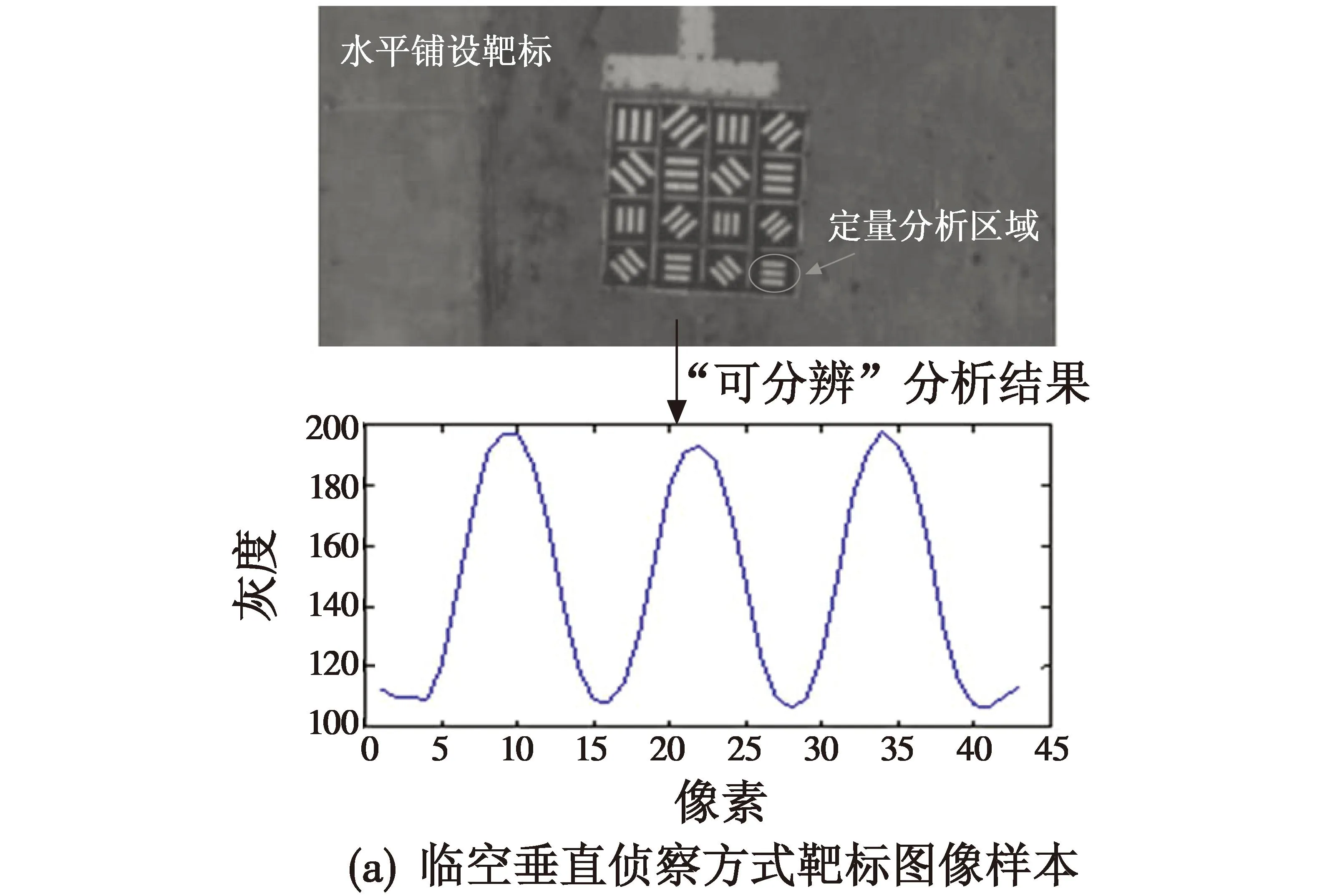
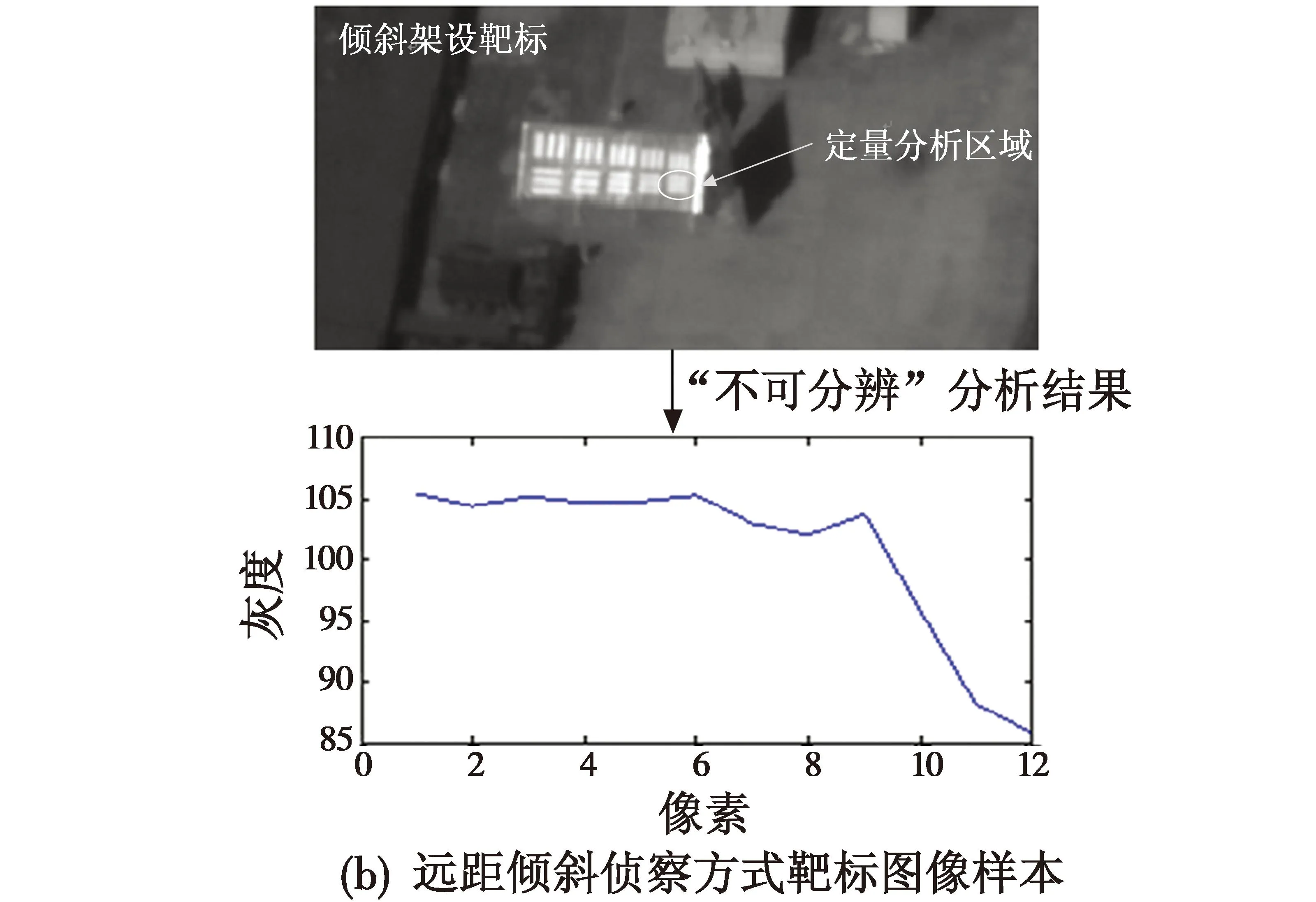
图9 地面分辨力直观与定量评估图像样本Fig.9 Image sample for visual and quantitative evaluation of ground resolution
5 结束语
本文针对大型无人机各型光学侦察载荷对地分辨能力验证要求,提出了一种飞行试验评估方法,给出了地面分辨力的直观与客观评估具体途径,从而实现对大型无人机地面分辨力定量测试与评估。实际飞行试验应用与验证表明,该方法能够对大型无人机各型光学侦察载荷对地分辨能力进行定量、准确、客观评估,可广泛应用于大型无人机光学侦察载荷评估试验。
猜你喜欢
红外技术(2022年4期)2022-04-25
石油沥青(2021年1期)2021-04-13
军民两用技术与产品(2021年10期)2021-03-16
世界农药(2019年3期)2019-09-10
光学精密工程(2016年4期)2016-11-07
制冷技术(2016年4期)2016-08-21
测绘科学与工程(2016年4期)2016-04-17
医疗卫生装备(2015年9期)2015-12-27
中国光学(2015年5期)2015-12-09
肿瘤影像学(2015年3期)2015-12-09
