
自动化铸造生产线工艺特点分析
2024-02-23 06:07高狄段坤李星辰王宪
大型铸锻件 2024年1期
高狄 段坤 李星辰,3 王宪
(1.长沙长泰机器人有限公司,湖南 长沙 410000;2.湖南科技大学机电工程学院,湖南 湘潭 411100; 3.湖南兵器建华精密仪器有限公司,湖南 永州 425000)
铸造是现代制造工业的基础工艺之一,在国民经济发展中处于不可或缺的重要基础地位[1]。自动化铸造生产线指采用智能机器人将铸造的多道工序集中在同一条自动化流水线上进行生产加工的生产线。它区别于传统铸造产线以单独特定的加工工序、人工依赖性强的铸造生产方式,智能化铸造生产线有着工序高度集中、混线生产、多台机器人协作、智能化程度高的特点,对提高铸造生产线自动化和智能化水平有重要意义。由于产线工序比较集中,故大多数操作均由智能机器人单独或协作完成。工序中,砂芯或铸件的搬运操作由重载机器人负责完成,机器人的搬运操作均可简化机器人点到点的轨迹规划问题。搬运多品种、大质量的砂芯或铸件导致机器人末端负载质量变化范围大,给机器人运动控制带来不小的挑战;与此同时,即使机器人末端夹具存在柔性化,也需要多套夹具配合使用,才能够满足铸造生产线的混线生产需求。
根据发动机关键零部件铸造生产线混流、混线的特点,为将铸造生产线由工人操作的机械化向机器人化与智能化转型,需研究铸造工艺、铸造作业机器人、铸造过程信息,并自主研制铸造机器人智能化生产线。针对砂型造型、砂芯制芯、取芯、涂料喷涂浸涂、涂胶、组芯、下芯、合箱阶段和后处理阶段等一系列制造工序的难题,完成了项目的关键技术方案设计,实现根据不同工序的特点和要求对机器人应用集成开发,组建多型号、多批量发动机零部件产品混线生产的多工序机器人自动化生产线,并对产线的工艺流程和布局进行规划,以满足铸造生产过程对质量与效率的要求。
实现铸造生产线的自动化和智能化是提高生产效率、保障产品质量的重要途径。近年来,随着人工智能技术和机器人技术的快速发展,实现铸造生产自动化的条件已基本具备。但是,由于铸造生产线工序众多、工艺复杂、要求高、现场环境恶劣,机器人应用于自动化铸造生产线时存在功能实现质量不佳、互相配合不好、错误频发等一系列问题。目前,机器人在自动化铸造生产线上的应用仍不太成功。
深入了解自动化铸造生产线的工艺流程和特点,是推进机器人在铸造行业应用进而真正实现铸造生产的自动智能化的重要基础。为了实现上述目标,本文详细分析了智能化铸造生产线的工艺过程和技术需求,进一步重点讨论了在多个重要工艺中都存在的搬运操作。总结了设计自动化机器人铸造生产线时需要考虑的问题。
2 自动化铸造生产线的工序
自动化铸造生产线共包含6道工序,如图1所示。首先抓取砂芯并去除毛刺;接着将砂芯组装成芯包,并对芯包进行浸涂,组装芯包与外芯模;然后,将熔炼的金属液体浇注入铸型内冷却凝固;最后铸件落砂、去除毛刺。其中工序2、工序3和工序4需要应用搬运机器人,工序1和工序6需要应用搬运机器人和打磨机器人。

图1 铸造生产线的工序
2.1 砂芯浸涂工艺
对砂芯浸涂是铸造生产线中最为重要的工序之一,浸涂的特点是生产效率高,操作简单,涂料损失少[2]。砂芯浸涂工艺流程如图2所示。

图2 砂芯浸涂工艺流程
(1)砂芯抓取。砂芯通过托盘输送带送至浸涂工序处,由于没有定位装置,机器人在抓取砂芯之前需要准确定位并调整姿态,确保抓取路径的准确性。机器人在抓取砂芯时需要根据砂芯的材质和结构特点,合理施加力度,避免损坏砂芯。因此砂芯抓取涉及的关键工艺参数有:砂芯空间位置、机器人空间位置与抓取姿态、砂芯抓取力、砂芯抓取速度等。
(2)移动至浸涂池上方。考虑到现场环境与效率,需对机器人抓取砂芯移动到浸涂池上方的空间轨迹进行规划,还需要考虑砂芯稳定性与速度的均衡,移动速度过快,砂芯晃动大、稳定性差;反之砂芯稳定性好、效率低。因此,该工序关键工艺参数为机器人空间运动路径与空间运动速度。
(3)砂芯浸涂。砂芯浸涂是指机器人带动砂芯向下浸入浸涂池、停留、出浸涂池三个基本动作。砂芯浸入动作过程中,对浸入的速度有要求,速度快容易引起涂料飞溅,反之效率低,砂芯浸入浸涂池的深度以及停留时间有要求,这与砂芯种类、涂料材料相关。出浸涂池主要是控制速度及出浸涂池后砂芯离液面的高度,提升速率快,漆膜薄;提升速率慢,漆膜厚且不均匀。
(4)砂芯摆动。砂芯提升后为了去掉多余的涂料,摆动砂芯以甩去多余的涂料。摆动的频率和振幅影响浸涂的效果。
(5)移动至放置点上方。该工步的要求与(2)相同。
(6)砂芯释放。移动至托盘指摆动后移动至托盘准备放料。此工序研究的内容为移动速度,需找出合适的移动速度。
(7)机器人回原点。机器人回到原点,进入下一循环。此工序研究的内容为移动速度,需找出合适的移动速度。
根据上述分析可知,砂芯浸涂相关的关键工艺参数如表1所示。

表1 砂芯浸涂关键工艺参数
2.2 铸件打磨工艺
铸件打磨是铸造生产线的另外一个重要工序,其工艺流程如图3所示[3-6]。

图3 铸件打磨工艺流程
(1)工件放置:铸件通过搬运放置在定位平台,在放置过程中,根据铸件的情况对工装的夹紧力做出相应的调整。
(2)工位切换:旋转工作台将待打磨的工件切换至打磨工位。在实际生产线中,为了尽可能提高生产效率,旋转台的工作转速将在匹配整条生产线的情况下,尽可能地提高至最大速度,同时快速实现工装定位。为此,旋转台的转速以及铸件定位是该工序中关键工艺参数。
(3)视觉识别与定位:三维激光扫描仪扫描、检测待打磨工件,对铸件完成定位后得到铸件整体空间位姿,机器人可根据铸件空间位姿对刀具的姿态进行调整和定位,确定机器人打磨路径。由此可看出铸件的定位识别、打磨路径规划将直接影响整个打磨的精度和准确性。
(4)铸件打磨:机器人进行打磨过程中,机器视觉系统和敏捷控制系统将实时识别铸件状态,根据铸件实时姿态,对打磨刀具的进给量和转速做出实时调整。同时打磨测试开始时根据不同的打磨对象,选择与之匹配的刀具;工件可随打磨工位的转台回转,以保证打磨完成率和完成效率。在完成整个打磨的过程中,铸件的刀具选择、机器人姿态控制、敏捷控制系统等将是影响整个打磨效率与效果的关键。
(5)完成打磨:打磨完成后,机器人系统将根据预先设置的程序自动归位。
(6)工位切换:旋转工作台将打磨好的工件切换至上下料工位。
根据上述分析可知,铸件打磨相关的关键工艺参数如表2所示。
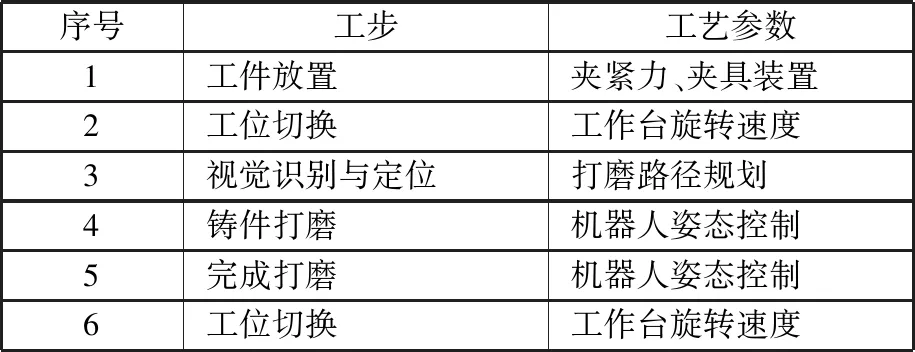
表2 铸件打磨关键工艺参数
2.3 砂芯组装工艺
砂芯是铸造过程中实现型腔结构的关键部件。传统的砂芯组装方式需要人工操作,工艺繁琐、效率低下、质量难以保证。
机器人组装砂芯工艺,见图4,突破了传统的人工组装限制,通过自动化的方法实现砂芯的高效、精准组装。该工艺主要包括以下几个步骤:

图4 砂芯组装工艺流程
(1)前期准备:准备好所需的砂芯元件和机器人设备,设定组装参数和路径,要根据砂芯的形状和尺寸,规划合适的路径,确保合适的机械手运动轨迹,以避免碰撞和干涉,并保证砂芯组装的准确性和稳定性。
(2)砂芯元件供应:机器人根据预设的程序和路径,从储存区域或物料搬运线上取出所需的砂芯元件,确保供应的连续性和准确性。
(3)砂芯组装:机器人将取出的砂芯元件按照预定的组装方式进行组装,可以通过传统的机械夹具或特制的机械手段进行操作。机器人可以根据不同的砂芯形状和组装要求,进行高度的灵活调整和控制。
(4)监测和调整:机器人在组装过程中可以通过传感器和视觉系统实时监测砂芯的位置、角度和尺寸等参数,对组装过程进行动态调整和纠正,以确保砂芯的质量和精度。
(5)成品处理:机器人完成组装后,将成品放置到指定位置,并进行下一次组装的准备工作,如清理和更换砂芯元件。
根据上述分析可知,砂芯组装相关的关键工艺参数如表3所示。
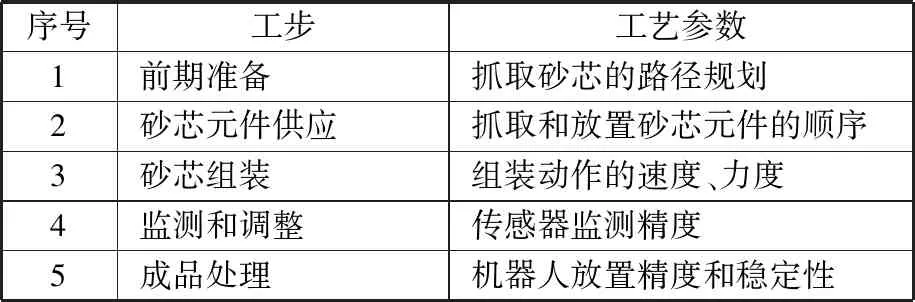
表3 砂芯组装关键工艺参数
2.4 浇注工艺
浇注工艺是指在铸造过程中将熔融金属或合金倒入砂型或金属型中,形成所需铸件的制造过程。浇注工艺的主要步骤包括:
(1)准备工作:包括准备所需的原材料,如金属或合金的熔炼、砂型或金属型等;选择合适的浇注温度以确保金属能够充分流动并填充整个型腔;对砂型或金属型进行准确的定位和固定。
(2)熔炼:采用适当的熔炼设备和工艺,将金属或合金加热到合适的浇注温度,使其熔化成为熔融状态的液体金属。
(3)浇注:机器人根据预先编程的路径和参数,进行自动化浇注操作,将熔融金属或合金倒入事先准备好的砂型或金属型中,以充分填充整个型腔。在浇注过程中需要对机器人浇注速度和浇注温度,以及喷射流速和角度加以控制,确保金属液连续且均匀地充满型腔,并尽量减少气体或杂质的混入。
(4)冷却和固化:待金属液充分填充型腔后,让其逐渐冷却和固化,形成具有所需形状和结构的铸件。冷却和固化时间的控制是关键,需要根据金属的特性和铸件的尺寸结构进行合理的时间规划。
(5)铸件脱模:当铸件完全冷却固化后,机器人可以将其从砂型或金属型中取出。对于砂型,可采用敲击或震动方式,使砂芯与铸件分离;对于金属型,可通过破裂、融化或拆卸等方式将铸件取出。
(6)去毛刺和修整:取出的铸件可能会有一些毛刺、砂瘤、气孔等缺陷,需要进行去除和修整,打磨机器人可以对这些缺陷进行检测和修整。
机器人浇注工艺的关键要素包括浇注温度、浇注速度、浇注方式、冷却时间的控制等。这些参数需要根据所需铸件的材料、形状和尺寸等特性进行调整和优化,以确保铸件质量和工艺的稳定性。
3 铸造生产线中的机器人搬运操作
通过第2节的分析可知,自动化铸造生产线的几乎所有工艺工序都需要搬运操作参与。在取芯、组芯、浸涂工序中,搬运操作位于两个工序之间,是连接两个工序的操作,因而对搬运操作有着生产节拍要求;而在铸件打磨工序中,搬运操作还有重负载特点。生产节拍对机器人执行任务时的运动时间有着严格要求,重负载工况会导致机器人在运动时和运动结束后容易产生振动。智能化铸造生产线流程及搬运操作特点如图1所示[7-8]。
工件搬运是铸造过程的一个基础操作,主要是将抓取点位置的工件,通过机器人搬运至放置点位置,通常采用“门”字型运动路径[9-12],如图5所示。
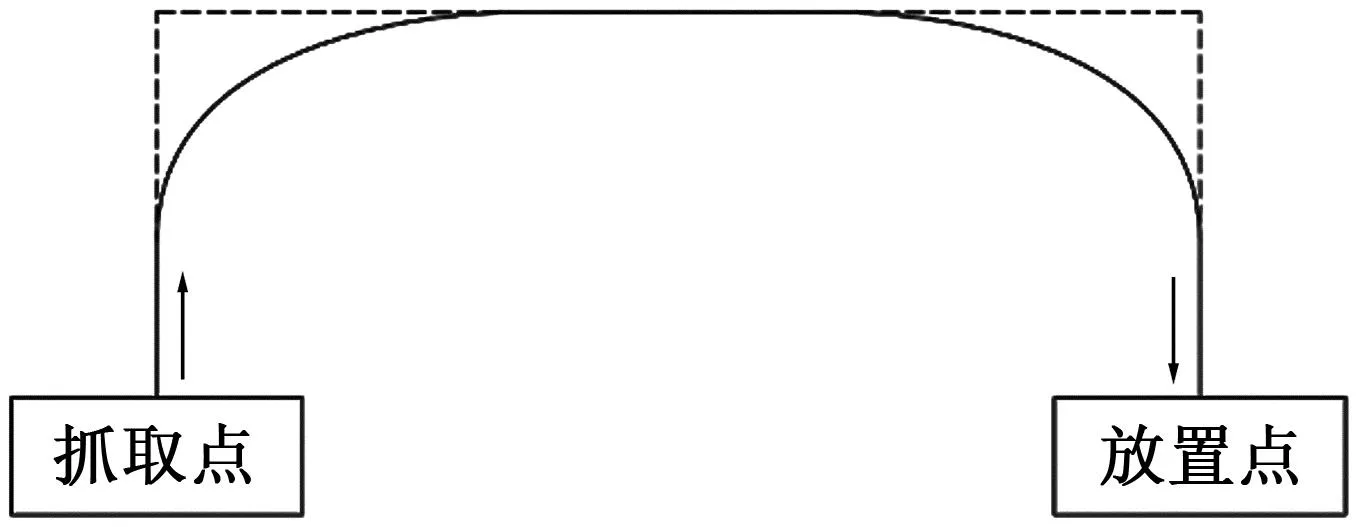
图5 “门”字型运动路径
由上述可知,工件搬运可分解为三个工步:即抓取点位置工件抓取、移动至放置点位置上方、放置点位置工件释放,如图6所示。三个工步的具体描述如下:

图6 搬运操作流程
(1)工件抓取。工件通过托盘输送带送至工件抓取处,由于没有定位装置,工件的空间位置不确定。因而,机器人需要根据砂芯的位置调整抓取姿态及抓取位置。砂芯抓取力的大小也需要根据砂芯的大小、重量进行相应调整。工件抓取涉及的关键工艺参数有:工件空间位置、机器人空间位置与抓取姿态、工件抓取力、工件抓取速度等。
(2)移动至放置点上方。考虑到现场环境与效率,需对机器人抓取工件移动到放置点位置上方的空间轨迹进行规划,还需要考虑砂芯稳定性与速度的均衡,移动速度过快,砂芯晃动大、稳定性差,反之工件晃动小、稳定性好、效率低。因此,该工步关键工艺参数为机器人空间运动路径与速度。
(3)放置点位置工件释放。考虑到下芯、组芯等工序过程中,对工件释放有空间位置精度要求,这就对放置点位置释放工件前,机器人需要控制空间位置精度以及姿态,其涉及的工艺参数有空间位置、姿态;机器人夹具松开砂芯过程中,机器人运动速度、夹具松开的空间位置都有要求,其相关的工艺参数有机器人运动速度、机器人夹具松开工件的空间点位置。
通过上述分析可知,搬运操作相关的关键工艺参数如表4所示。
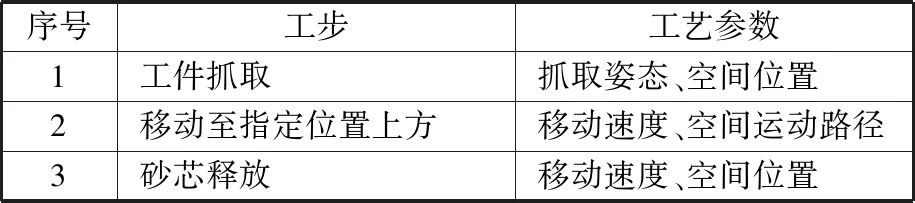
表4 搬运操作关键工艺参数
通过上述分析可知,只考虑机器人本体时,需要考虑的工艺参数有:抓取姿态、空间位置、运动速度、空间运动路径。
4 机器人铸造工艺的优点及局限性
机器人铸造工艺相对于传统铸造工艺具有以下的优点:
(1)机器人铸造工艺能够实现连续、高速、准确的操作,大大提高了生产效率。机器人可以在短时间内完成大量铸件的浇注和后续处理工作,降低了生产周期和成本。
(2)机器人操作准确、稳定,能够按照预设的工艺参数执行操作,避免了人工操作中可能出现的误差和变量。
(3)机器人在铸造过程中能够控制浇注温度、浇注速度等关键参数,保证了铸件的质量和一致性。同时可以取代繁重、危险和重复的人工劳动,降低了由于长时间重复操作引起的职业病风险,提高了工作环境的安全性。
(4)机器人铸造工艺能够根据不同的产品要求、形状和尺寸进行灵活调整和操作,适应多样化的铸件生产需求,可以快速更换工作模具和调整工艺参数,提高了生产的灵活性和适应性。
机器人铸造工艺也存在一些挑战和局限性,机器人铸造工艺需要投资大量的设备和自动化系统,并且需要进行定制化的工艺规划和编程,初始投资较高。这对于一些小规模企业来说可能是一个挑战。目前机器人铸造工艺主要适用于结构相对简单的铸件,对于结构复杂、尺寸较大的铸件仍存在一定的限制。复杂结构的铸件可能需要复杂的操作和多次铸造,无法完全实现自动化。机器人铸造工艺需要具备高精度的运动控制、传感器监测和程序编程能力,需求技术要求较高的操作人员和维护人员。
综上所述,机器人铸造工艺在提高效率、质量和工作安全性方面具有明显优势,但也面临一些技术和成本方面的挑战,需要综合考虑和合理应用。
5 结论
本文给出了铸造生产线整体工艺流程。着重讨论了铸件浸涂、铸件打磨等重要工序,给出了关键的工艺参数。由于搬运操作在自动化铸造生产中几乎无处不在,本文最后对搬运操作进行了重点分析。
智能机器人在铸造生产线中的应用,有效地降低了生产过程中的人力投入。自动化优势使得铸造生产过程更加高效、稳定。机器人可以24 h不间断工作,大大提高了生产线的产能和稳定性,从而满足市场对大批量优质产品的需求。智能机器人在铸造生产线中的应用为铸造行业带来了革命性的变革。它提高了生产效率、产品质量和生产线灵活性,降低了劳动强度,为行业可持续发展提供了强有力的支撑。在推动机器人应用的过程中,我们需要认真应对相关的技术、经济和社会问题以确保机器人的稳健应用,并在人机协作中实现最佳效果。未来,我们有理由相信,机器人技术将继续推动铸造行业迈向更加智能、高效和可持续发展。
猜你喜欢
铸造设备与工艺(2022年4期)2022-11-15
中老年保健(2022年1期)2022-08-17
机械工业标准化与质量(2022年3期)2022-08-12
今日农业(2021年13期)2021-11-26
中学生数理化(高中版.高考理化)(2021年6期)2021-07-28
锻压装备与制造技术(2021年2期)2021-07-19
中国铸造装备与技术(2017年6期)2018-01-22
中国铸造装备与技术(2017年3期)2017-06-21
现代企业文化(2016年1期)2016-12-23
有色金属设计(2015年2期)2015-02-28
