
基于整车控制功能仿真的城市轨道交通列车模拟驾驶系统研究
2024-02-22 07:24:54郭超王延翠王田农谭晓彪刘海波
铁道通信信号 2024年2期
郭超,王延翠,王田农,谭晓彪,刘海波
随着计算机技术的飞速发展,利用计算机仿真和虚拟现实技术搭建列车模拟驾驶操作平台和操作环境,在现代司机驾驶培训和考核中广泛应用。模拟驾驶中的牵引制动仿真控制主要利用计算机仿真技术实现:成利刚等[1]研究了列车牵引仿真模型,提升了系统的运行控制真实性;蔡忠法等[2]通过对输入的操作指令线性化处理,提出结构简化的汽车速度和方向控制模型;孙壮等[3]研究了一种半实物半虚拟的模拟驾驶动力学仿真平台,实现了根据线路数据和司机操作指令实时更新仿真模型。计算机图像生成技术的应用提升了模拟驾驶系统的沉浸驾驶体验:王怀松等[4]提出了基于三维视景的列车运行仿真平台;牛清华等[5]采用MultiGen Creator构建三维视景模型,实现了初级虚拟城轨列车训练驾驶器;谭喜堂等[6]采用视频压缩技术和多媒体声音系统,设计了具有4层5自由度液压运动平台的驾驶仿真器。一些学者进一步研究了列车模拟驾驶系统的扩展培训功能:查伟等[7]将PLC型模拟驾驶台接入卡斯柯既有城轨信号综合仿真平台(iVP200),实现了模拟驾驶台的信号联动仿真培训功能;苏虎等[8]基于DIS通信协议构建了一种分布式列车驾驶仿真器,实现了多仿真器协同训练。但以上列车模拟驾驶系统的研究未充分考虑列车的控制电路逻辑、整车仿真模型联动逻辑,无法实现列车控制电路逻辑仿真和子系统控制功能仿真。
本文提出一种基于整车控制功能仿真的城市轨道交通列车模拟驾驶系统,依据实际列车电气设计原理图,搭建列车电路仿真模型,集成各子系统控制功能仿真模型,真实还原列车控制逻辑、操控过程、牵引制动特性,从视觉、听觉、操作感受等方面还原列车实际驾驶场景,同时能够模拟列车电气元器件故障场景和线路、设备突发事件,培训司机故障处置、排查能力以及支撑车载各关键业务系统开发对仿真验证环境的客观需求。
1 总体架构
基于整车控制功能仿真的城市轨道交通列车模拟驾驶系统主要包括操作台、人机交互系统、数据采集与仿真控制设备、视景及声音仿真系统、教员系统,系统架构见图1。
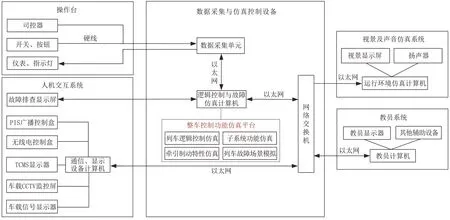
图1 列车模拟驾驶系统架构
1.1 操作台
操作台设置了与真实列车操作台一致的控制器件,包括司控器、开关、按钮、指示灯、仪表等。控制器件具有与实际列车对应设备相同的功能与控制逻辑。
1.2 人机交互系统
人机交互系统包括故障排查显示屏、乘客信息系统(Passenger Information System,PIS)广播控制盒、无线电控制盒、列车控制与监控系统(Train Control and Monitoring System,TCMS)显示器、视频监控系统(Closed-Circuit Television,CCTV)监控屏、车载信号显示器及通信、显示设备控制计算机。
故障排查显示屏用于司机室、客室各电气柜的断路器、开关、继电器等器件的人机交互,可通过操作显示屏上的设备,控制电路仿真模型对应元器件状态,实现列车控制及故障排查;PIS广播控制盒可实现人工广播、全自动报站、手动报站等功能;车载CCTV监控屏预存列车监控视频文件,可通过触摸显示器查看各摄像头预存监控画面[9],当整车控制功能仿真平台模拟列车触发紧急情况时,如火灾、车门紧急解锁等,CCTV监控屏可联动显示故障位置监控画面;无线电控制盒支持司机与教员系统通话功能,模拟真实行车过程中司机与行车调度台通话、接收行车调度台的广播呼叫、紧急呼叫等;TCMS显示器与整车控制功能仿真平台进行数据交互,获取列车各子系统的状态信息,展示车辆状态信息、操作提示等,同时可操作TCMS显示屏将控制命令输出至相应的子系统仿真模型,实现对子系统的控制,如牵引、辅助故障复位等;车载信号显示器向列车驾驶员提供信号运行模式、故障、操作等信息,与整车控制功能仿真平台输出的列车控制模式配合实现列车控制系统自动驾驶(ATO)、ATP监督下的人工驾驶(ATP)、限制人工驾驶(RM)、非限制人工驾驶(NRM)、自动折返(ATB)等驾驶模式及运行等级下的正常/故障场景功能仿真。
1.3 数据采集与仿真控制设备
数据采集与仿真控制设备包括数据采集单元、逻辑控制与故障仿真计算机、网络交换机。
数据采集单元配置数字量输入输出板、模拟量输入输出板,用于采集操作台控制器件的数字量(开关、按钮)、模拟量(司控器)信号,通过以太网将输入信号转发给逻辑控制与故障仿真计算机。
逻辑控制与仿真计算机搭载整车控制功能仿真平台,用于实现模拟驾驶系统各项控制功能,包括列车特性仿真、列车驾驶模式及运行等级模拟、列车故障或突发事件模拟、电路逻辑仿真等。在进行逻辑运算后根据当前列车状态,将操作台器件状态发送给数据采集单元,控制和驱动对应指示灯、仪表动作。
逻辑控制与故障仿真计算机、数据采集单元、人机交互系统、视景与声音模拟系统、教员系统通过交换机组建局域网,实现各设备间数据通信。
1.4 视景及声音仿真系统
视景仿真系统采用计算机生成图像技术[10]实现视景仿真,能够真实反映线路行车设备、自然景观、沿途车站等信息,可根据列车速度变化,实现视景的联动变化。声音仿真系统提供运行环境的听觉效果,仿真列车运行时的声音环境。
1.5 教员系统
教员系统实现对多台司机驾驶操作台的控制,主要功能如下。
1)系统数据库管理、学员及教员信息管理。
2)培训/考核课程编辑,故障信息的编辑与管理。
3)对驾驶操作台进行独立或批量课程发布。
4)学员综合评分及多维度能力评估,评估报表生成及培训记录管理。
5)设定各驾驶操作台的运行环境与工况,对驾驶模拟过程进行监控与干预。
2 整车控制功能仿真平台设计
2.1 平台架构
列车模拟驾驶系统基于整车控制功能仿真平台实现核心的逻辑控制与故障仿真,仿真平台包括通信层和执行层,其架构见图2。

图2 平台架构
通信层负责仿真平台与外围的控制类、显示类系统进行数据交互。仿真平台支持通过网络传输控制协议(Transmission Control Protocol,TCP)、用户数据报协议(User Datagram Protocol,UDP)、进程控制对象连接(OLE for Process Control,OPC)协议与数据采集单元、人机交互系统、视景及声音模拟系统、教员系统通信,并实现操作器件的控制指令输入和显示设备的驱动。
执行层根据外围输入变量执行逻辑控制,实现电路逻辑仿真、子系统状态仿真,并输出外围设备状态驱动变量。仿真模型的操作器件、执行器件分别和外围设备对应的实际操作、执行器件变量映射,实现司机操作指令向仿真模型的传递和仿真模型对外围执行器件的驱动控制。
2.2 平台功能
2.2.1 整车电路逻辑仿真
整车控制功能仿真平台支持搭建车辆控制电路仿真模型,根据司机操作指令,模拟车辆各子系统控制回路的动态逻辑变化。
电路仿真模型中的虚拟操作台器件与数据采集单元的实体器件(开关、按钮、司控器)绑定,实现实体器件与模型联动。仿真平台根据采集的输入指令,进行逻辑仿真和运算后,输出仪表、指示灯驱动指令,实现实体仪表、指示灯的控制。
2.2.2 列车运行特性仿真
列车运行特性仿真模块模拟实际列车的加速度及常用制动、紧急制动、快速制动等特性,仿真列车在不同的线路条件、运行阻力、列车载重、牵引供电电压等工况下的运行特性;将列车牵引制动仿真模型与实际线路信息、车辆控制指令结合,实现列车实时速度、位置、加速度等参数计算。列车运行特性计算流程见图3,计算步骤如下:

图3 列车运行特性计算流程
Step 1根据输入的车辆参数,计算列车基本运行阻力Frr
式中:V为列车速度,α、β、γ为列车不同载重所对应常数。
Step 2根据输入线路参数,计算坡道阻力Frs和曲线阻力Frc
式中:Ws为列车静态重量,g为重力加速度,S为线路最大坡度,Cr、Cr1为常数,R为线路最小曲线半径。
Step 3由Frr、Frs和Frc可得列车运行阻力Fr
Step 4根据输入的司机牵引、制动指令及牵引制动力参数,计算列车加速度a。
牵引状态时,列车加速度为
制动状态时,列车减速度为
式中:Fq为列车施加牵引力,Fb为列车施加制动力,ma为惯性质量。
Step 5根据列车当前状态、位置,设置仿真步长,由列车加速度计算更新列车实时速度Vi+1和实时位置Si+1
式中:Δt为仿真计算步长。
图4为列车运行特性仿真模块计算输出的特性曲线,包括列车位置、实时速度、运行时间等参数。
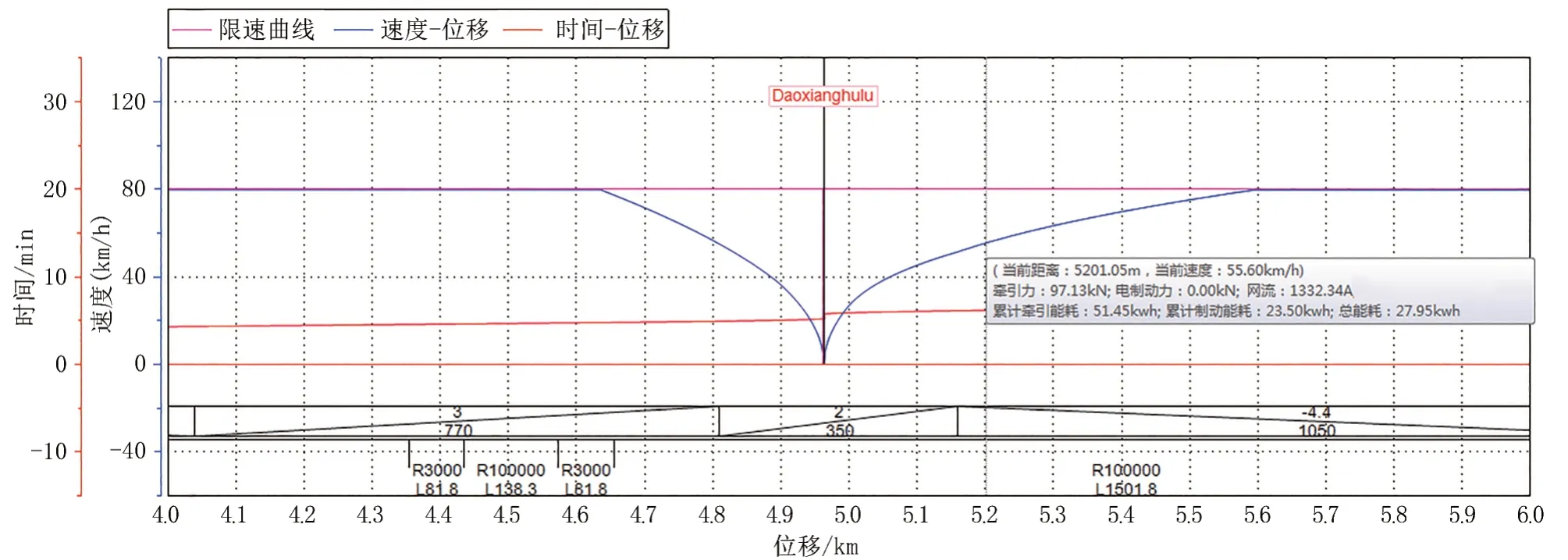
图4 列车运行特性曲线
2.2.3 子系统控制功能仿真
搭建信号、辅助供电、车门等列车子系统功能模型,将模型与整车电路仿真模型连接,模拟子系统实际外围控制电路逻辑,构建整车控制功能仿真模型。
1)信号系统仿真。模拟信号系统外围车辆电路输入输出IO状态,实现信号系统对车辆逻辑电路控制及状态采集,从而仿真列车不同驾驶模式的切换。
2)辅助供电仿真。实现列车的辅助电源系统(三相电、直流电)与电源的逻辑关系,更新列车的电源总线、各子功能模块的供电状况,模拟列车低压配电、高压配电的控制逻辑和功能。
3)车门状态仿真。根据司机指令、门控单元的输入信号、故障设置等参数,实现车门开关、车门故障等控制逻辑模拟。
2.2.4 人机交互界面逻辑控制
整车控制功能仿真平台中的电气柜虚拟开关、按钮、继电器、仪表、指示灯等器件状态,以及各子系统状态信息,通过OPC协议、TCP协议或UDP协议转发到人机交互系统。与故障排查显示屏的电气柜交互界面对应设备绑定,实现控制同步。并与TCMS显示屏、车载信号显示屏对应子系统状态显示模块绑定,展示子系统状态信息。
2.2.5 视景与声音模拟系统联动
视景及声音仿真系统根据列车特性仿真计算的列车实时速度、位置等信息,联动展示列车运行位置的自然景观、沿途车站等视景信息,可模拟列车不同运行速度的轨道声、风声等。并根据整车控制功能仿真平台输出的子系统状态信息,驱动对应的鸣笛声、制动声、电器件吸合/断开声等。
2.2.6 列车故障场景模拟
整车控制功能仿真平台支持设置多种类型原理级故障(如继电器触点黏连、断路器脱扣等)、子系统故障场景,与人机交互界面、视景及声音仿真系统进行数据交互,实现列车真实控制逻辑及故障分析排查。
3 试验测试
3.1 司机行车操作测试
司机按照正常行车过程操作,验证列车逻辑是否符合要求。
司机操作:司机室激活,按下升弓按钮,司控器至于前向位,牵引就绪后,推动司控器级位至牵引位。
试验结果:司机室激活电路仿真模型中,有电回路、器件呈高亮显示,司机室占有继电器激活、列车占有继电器激活;TCMS显示屏显示列车对应司机室激活,受电弓升弓,网压正常(1 522 V),见图5;视景系统根据列车速度、位置实时联动显示列车运行场景,见图6;同时,声音模拟系统联动播放车辆运行环境声音。

图5 TCMS显示界面状态

图6 视景系统联动
3.2 列车超速信号触发紧急制动
仿真模拟信号系统的整车联动控制功能,以列车超速信号触发紧急制动场景为例。
司机操作:驾驶列车使速度超过ATP紧急制动触发速度。
试验结果:列车未超速时,电路仿真模型中紧急制动电路得电,见图7(a);列车超过ATP紧急制动触发速度后,列车信号系统输出紧急制动信号,电路仿真模型中信号机柜紧急制动干触点断开,使车辆紧急制动环路失电,见图7(b),列车紧急制动;车载信号显示屏显示列车处于紧急制动状态,见图8。

图7 紧急制动环路电路模型状态
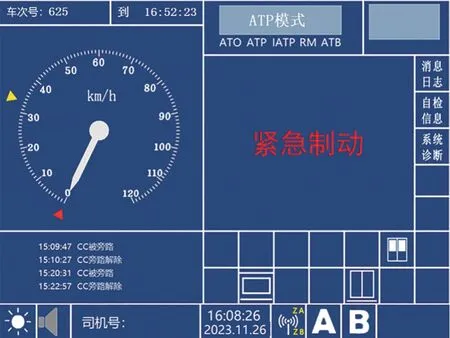
图8 车载信号显示屏显示列车施加紧急制动
3.3 列车故障场景测试
在教员系统设置列车电路原理级故障场景,以受电弓异常降弓场景为例。
教员操作:选择升弓使能丢失,受电弓异常降弓场景。
试验结果:电路仿真模型中,升弓使能继电器(K05)失电,导致电路失电,见图9(a)。

图9 升弓保持电路模型状态
司机操作:故障排查时,查看TCMS显示屏界面、故障排查显示界面,升弓使能继电器失电,则确认故障原因为升弓使能丢失导致异常降弓。操作故障排查显示屏中升弓使能旁路开关,重新升弓。
试验结果:升弓旁路继电器(K03)得电,故电路得电,受电弓重新升起,见图9(b)。符合真实列车故障工况状态及应急处置逻辑流程。
4 结束语
本文提出的基于整车控制功能仿真的城市轨道交通列车模拟驾驶系统,通过试验测试,可仿真列车控制逻辑、操控过程、牵引制动特性、故障场景及视听效果,为司机驾驶训练、故障演练提供了专业仿真培训平台,同时为同类仿真系统开发提供了技术参考。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:06:44
文萃报·周二版(2021年51期)2021-01-02 19:52:36
铁道通信信号(2020年3期)2020-09-21 09:13:00
杂文月刊(2019年19期)2019-12-04 07:48:34
小天使·一年级语数英综合(2019年11期)2019-01-13 01:31:29
铁道通信信号(2018年8期)2018-11-10 05:15:44
电子测试(2018年4期)2018-05-09 07:28:19
舰船科学技术(2015年8期)2015-02-27 15:38:41
上海质量(2014年1期)2014-05-05 08:56:50
振动、测试与诊断(2014年4期)2014-03-01 01:14:11
