基于PSO 算法的塑料挤出机温度控制技术研究
2024-02-22 09:48张跃宗
科学技术创新 2024年3期
张跃宗
(江苏中利集团股份有限公司,江苏 苏州)
塑料作为一种高分子合成材料,是工业生产的一种基础材料。塑料的制作工艺流程包括了挤出成型、注塑成型、压缩成型、压注成型等几种,挤出成型是最为普遍的一种工艺,多用于连续生产场景[1-2]。塑料挤出机是进行塑料挤出成型的重要设备,在实际的塑料制作过程中,对于温度控制十分重要,温度过高过低都会对产品质量造成一定程度的影响[3]。常规的PID控制方法动态性能较差、控制精度较低,对于塑料的成型控制效果并没有达到最优状态,因此提出了改进型的自适应粒子群算法,采用并行的双自由度PID 取代常规的PID,并对并行的双自由度PID 的控制器参数进行了优化处理,以保证对于塑料的成型控制达到最优状态,同时实现跟踪效果最优控制和抗扰动效果最优控制[4]。
1 塑料挤出机温控系统数学模型
在进行塑料制作的时候,塑料挤出机对塑料的控制温度是由对加热线圈,通过管壁进行热传导,并且在进行挤出时螺旋杆的助推会摩擦生热,所以塑料挤出机的温控回路具有时变性、滞后性和非线性的特点[5-6]。
2 双自由度PID 控制器
在单自由度的PID 控制器中,其只有一组参数是可调的,所以无法满足抗扰动能力和跟踪效果同时达到最优状态[7-8]。偏向抗扰动能力效果好时,必然牺牲跟踪效果;偏向跟踪效果好时,必然牺牲抗扰动能力。因此,双自由度的PID 控制器控制性能要优于单自由度PID 控制器,并行式双自由度PID 控制器结构见图1。

图1 并行式双自由度PID 控制器
其中,r(t)为目标值,d(t)为干扰值,u1(t)为PD 控制器的输出值,u2(t)为PID 控制器的输出值,u(t)为u1(t)和u2(t)的和。
对于PD 控制器Gc1,主要承担跟踪控制功能;对于PID 控制器Gc2,主要承担抗扰动功能。
双自由度的闭环输出表达式为:
其中,Kc1和Kc2为增益系数,Td1和Td2为微分常数,Ti2微积分常数。
采用帕德逼近或幂级数的方法得到传递函数中分母延迟项,使分母多项式的阶数与控制参数的个数保持一致,将所需传递函数分子设置为所得传递函数的分子。其中伺服参数λ 和抗扰参数τ 对于双自由度并行式的控制器结构在输入发生变化的给定及扰动时,根据其闭环传递函数,推导出伺服环的闭环传递函数为:
3 并行式双自由度PID 控制器
3.1 实现原理
基于改进型自适应粒子群算法的并行式双自由度PID 控制器分为两部分进行设计,即并行式双自由度PID 控制器和改进型自适应模块[12-13]。本文基于粒子群算法为基础,在其中加入迁徙操作和自适应控制策略,以提高粒子群算法的运算精度,同时将并行式双自由度PID 参数进行融合。采用优化后的策略进行迭代计算,直至得到全局最优解。如图2 所示为基于粒子群算法的并行式双自由度PID 控制器的实现原理。
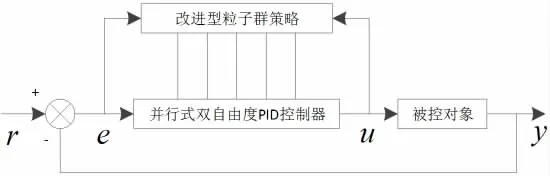
图2 并行式双自由度PID 控制器实现原理
3.2 算法改进
标准的粒子群策略速度及位置更新迭代公式为:
由于常规的粒子群策略存在缺陷,比如对外部因素影响不敏感,会由于参数Pid和Gid的影响陷入到局部最优解中,容易提前收敛。所以对粒子群策略的权重参数和惯性权重参数进行优化,以实现自适应,同时加入迁徙操作,对粒子群策略进行深度优化。
3.2.1 自适应部分优化
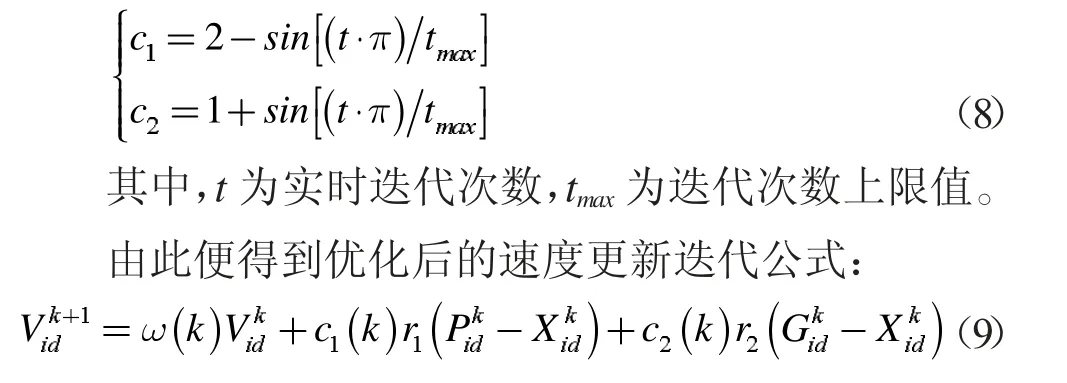
基于粒子群策略的速度及位置更新迭代公式,其中包含了惯性权重参数ω和两个学习参数c1和c2。合理的惯性权重参数ω可以实现全局和局部最优解的平均化,前期ω参数较大可以保证快速逼近最优解,后期ω参数较小,可以保证在最优解附近加强搜索精度,所以可以将ω参数值线性变小:
其中,ωstart为初始值,ωend为终了值,k 为实时迭代次数。公式中的学习参数c1和c2的作用是完成自主总结并向优秀粒子学习,参数需要合适才能保证迭代的顺利进行,所以其设置十分重要:
通过对速度更新迭代公式的优化,粒子具备自适应能力,全局寻优能力有所提高。
3.2.2 迁徙部分优化
基于粒子群策略的粒子多样性会对收敛性产生影响,从而导致进入局部最优解,在每次迭代过程中都会参考参数Pid和Gid的取值,这就导致多样性程度降低过快,进而影响迭代精度。因此可以将粒子群进行群体性划分,对群体性参数进行判断:
其中,t 为实时迭代次数,fitness(tbest)为第t 代粒子适应值,并且t>1 满足。
适应值参数P 和群体的多样性呈现正向的关联关系,参数P 取值较大则不需要进行迁徙,参数P 取值较小则需要进行迁徙,即从前期产生的最优区选取粒子取代早熟粒子。
对于含有迁徙操作的自适应粒子群策略,基本的操作步骤为:
(1) 对粒子群进行初始化,产生粒子随机运动速率、随机位置以及子粒子群,整个群体大小为mn,即m 为子粒子群个数,n 为子粒子群中的粒子个数。
(2) 对惯性权重参数ω 和两个学习参数c1和c2进行更新。
(3) 对各个粒子进行适应值计算,寻取粒子的参数Pid值和群体的参数Gid值。
(4) 对粒子的参数Pid值和群体的参数Gid 值进行更新。
(5) 对适应值与底线值进行比较,如果适应值大,返回步骤(2),如果适应值小,则执行迁徙操作。
(6) 根据结束条件进行判断,如果达到标准,执行最终值输出,如果未达到标准,返回步骤(2)。
4 仿真分析
为了验证本文所提出控制策略的有效性,将其应用于塑料挤出机的温度控制系统,进行仿真研究。通过对系统进行深度分析,得到控制对象的数学模型为:

对于适应度函数,可以采用粒子群的IAE 极限值减去实时的粒子群IAE 值,即:
在Matlab/Simulink 离线仿真环境下搭建仿真模型,进行仿真分析,得到总共四种方法的PID 控制器的参数整定结果,具体的数值如表1 所示。

表1 不同方法下PID 控制器整定值
参数IAE 和ISE 的计算公式为:
性能指标对比结果如表2 所示。
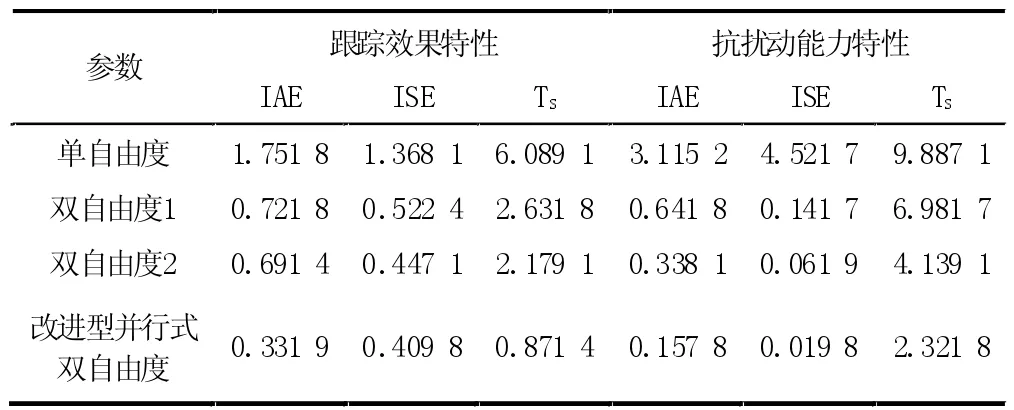
表2 不同方法下PID 控制器性能指标对比结果
由表2 可以看出,本文所提出的基于粒子群策略的并行式双自由度PID 控制器在跟踪效果特性和抗扰动能力特性方面优势十分明显,其IAE 参数、ISE 参数、TS 参数的性能指标都要明显优于单自由度、双自由度1、双自由度2 三种方法,能够取得较好的控制效果。
5 结论
本文为了解决塑料挤出机温度控制的要求,基于粒子群算法为基础,在其中加入迁徙操作和自适应控制策略,以提高粒子群算法的运算精度,同时将常规的PID 控制器替换为并行式双自由度PID,将并行式双自由度PID 参数进行融合,能够实现跟踪效果特性和抗扰动能力特性的兼顾,采用优化后的策略进行迭代计算,直至得到全局最优解。在Matlab/Simulink 离线仿真环境下搭建仿真模型进行研究,本文所提出的方法要明显优于其他三种方法,可以有效应用于塑料挤出机温度控制系统,具有一定的实用价值。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
数学物理学报(2022年4期)2022-08-22
数学物理学报(2019年4期)2019-10-10
制造技术与机床(2017年5期)2018-01-19
贵州师范学院学报(2016年3期)2016-12-01
中国塑料(2016年7期)2016-04-16
中国卫生标准管理(2015年24期)2016-01-14
中国塑料(2015年2期)2015-10-14
中国塑料(2015年11期)2015-10-14
中国塑料(2015年5期)2015-10-14