无人驾驶虾蟹投饲自主作业船及智能管控平台研发与应用
2024-02-22 09:48姜宽舒宋元山孟祥威孟德伟
科学技术创新 2024年3期
姜宽舒,于 泓,宋元山,孟祥威,丁 皓,孟德伟
(1.江苏农林职业技术学院,江苏 句容;2.江苏大学,江苏 镇江)
引言
我国是水产养殖和消费的大国,养殖产量已经在世界上占很大的比例,但是养殖模式还是相对传统落后,已经不能满足日益增长的消费需求。其智能化水平与养殖模式相对于欧美、日等发达国家而言还是相对落后很多[1]。传统的养殖模式需要依靠大量的人力成本,而且饵料投放也不合理,精确导航和智能饵料补给相对落后,这种养殖模式不仅耗时耗力,且严重制约了养殖效率和规模[2]。欧美、日等发达国家的精准导航定位技术发展较早,其水产养殖技术相对先进,智能化程度也比较高,自动导航、船舶控制等技术也已被广泛地运用于水产养殖的多个方面,大大地提高了养殖效益。目前,国内外对于集成了自动均匀投饵技术、无人作业船控制技术的水产养殖作业船研究不多,但是针对相关的技术分别出现了一些典型成果。
意大利的Techno SEA 公司早在20 世纪末期就已将自动投饵技术应用于浮体网箱养殖,并配套设计出了下沉式自动投饵机。该投饵机可全天候进行投饵,适用于不同类型、品质和大小的颗粒饲料,不足的是储料空间太小。日本NITT0 SEIKO 公司研发了小料仓集成控制投饵系统,该系统利用控制模块对安置在每个网箱上方的多个小料仓实现集成控制,其配套设施或装备大多借助轨道和电力驱动滑车等形式的行走机构完成移动投饵。这种轨道形式需预先布置安装,其工期较长、成本较大、灵活性不强,不利于大面积推广[3-4]。目前,国内规模化水产养殖投饵喂料主要采用几种方式:①人工撑船,人力投饵喂料,一人撑船,一人或两人投饵,仅凭人工经验,工作效率低,劳动强度大,无法保证投饵的均匀度;②人工撑船,船载投饵机投饵喂料,这种方式虽然可以通过投饲机置换部分劳动力,但同样存在船行进的路线全凭人工随意确定,随机性大,很难保证投饵的均匀度;③遥控自动投饵船,虽能根据人为遥控在池塘中投料,但投喂量依然由人工经验确定,航行路线随机性强[5]。以上三种方式都无法完全用机器换人,并且都无法实现精准均匀投饲,不利于大规格虾蟹的培育,导致养殖效益低下。由此可见,国内现有产品和其他科研单位所研发机具在功能上仅仅实现了机械化投饵,无法实现按生长需求精准饲喂,以及投饲饲料在生长区域内均匀分布[6]。
针对以上的技术瓶颈和行业痛点,本文在传统的单一功能人工水产养殖船基础上,研发基于GPS-RTK 技术的自主导航水产养殖作业船与智能管控系统,再基于“物联网+大数据”技术,开发一种多水域集群作业自主导航水产养殖船智能管控平台。本项目主要针对较大水域或多片水域养殖,通过APM中央控制器以及开源地面站测控软件,结合GNSS-RKT和惯性导航系统,实现作业船航行路径规划、水域自主巡航、精准投饵、均匀施药等多种功能,每条无人船对接水产养殖管控平台,实现多水域大规模无人化集群作业,最终达到提高虾蟹品质、降低投饲饲料和人力成本、减少环境污染,提高作业效率的目的,有效提高虾蟹养殖的经济效益与社会效益。
1 无人船总体结构设计
船体设计载重量200 KG,投饵、施药、明轮动力转向、辅助增氧、水质监测等执行装置均由一个电压为12 V、容量为200 Ah 的锂电池提供动力,太阳能电池板辅助供电,能够在兼顾作业效率的情况下满足45 min 超长续航。船体的三维结构设计示意如图1 所示。同时,本研发设计的无人驾驶虾蟹投饲作业船还兼具路径规划、自主导航、水质监测实施反馈、水质异常预警、集群控制作业等集成功能,具体的研发和推广技术路线如图2 所示。无人船多次迭代优化,依次经历了单体结构、明轮结构、双体结构、隐藏式双推进器结构。船体的稳定性、负载能力、抗倾覆性、避免缠水草等综合性能大幅提升。结构更加合理,便于推广。
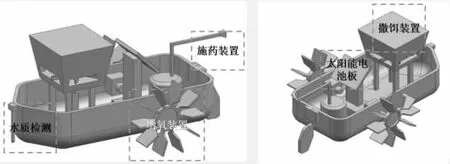
图1 无人船总体结构示意
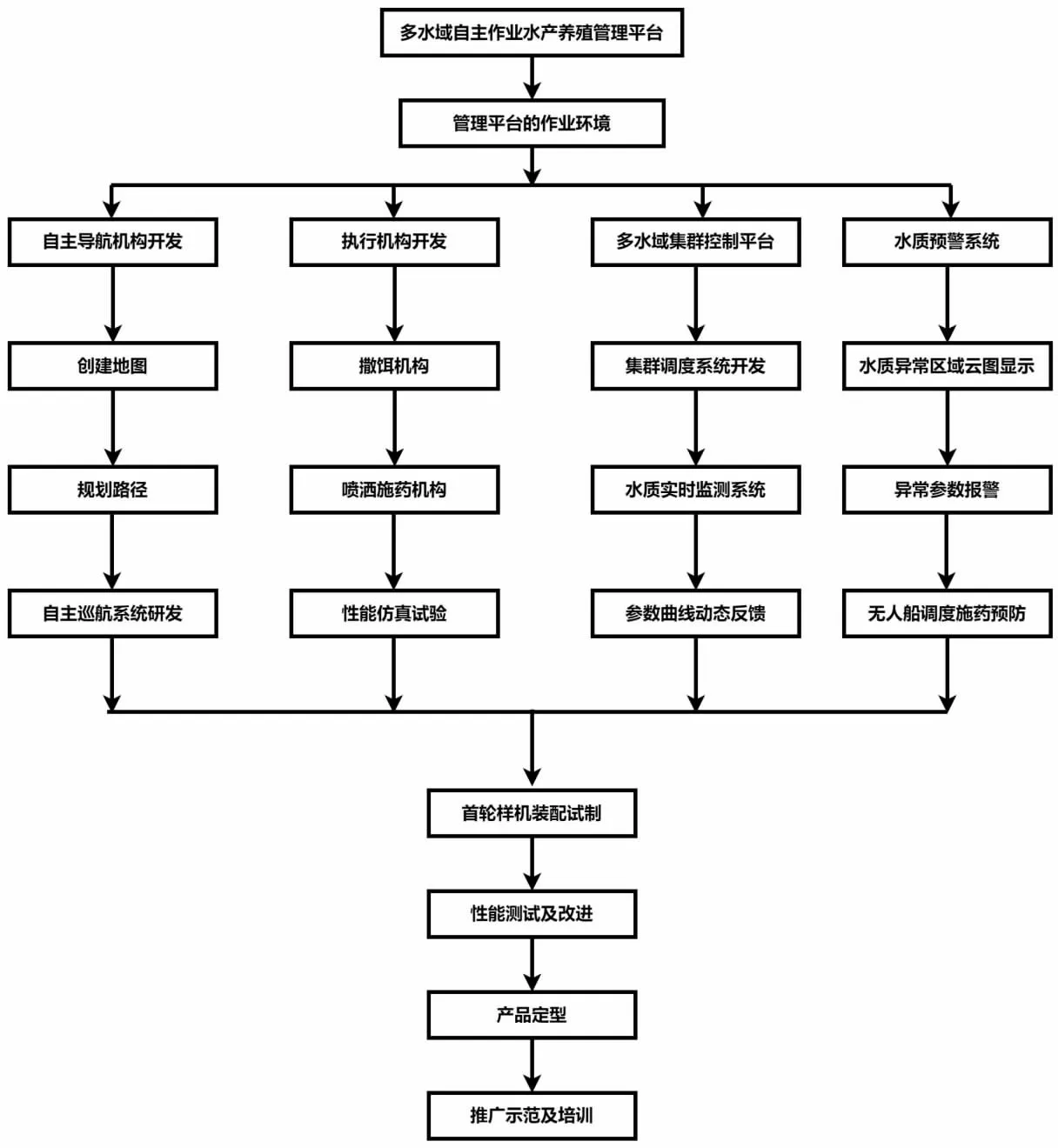
图2 研发推广技术路线
2 自动导航控制系统设计及模块集成
2.1 无人船地面测控系统
基于“物联网+大数据”技术,开发虾蟹水产养殖管控平台,可在手机端或电脑端远程操控多条无人船进行管理作业,实现无人船的多水域集群调度,按时按需进行大范围航线规划、自主巡航、精准投饵、施药以及航行数据实时监测反馈。首先路径规划系统对蟹塘区域进行路径规划,并将生成的目标作业路径下发给养殖船;接着养殖船上的APM主控制器通过GPS模块、超声波传感器模块获取养殖船当前的位置速度、航向、障碍物距离等信息,使用内置的航向航速双闭环控制算法进行处理,根据处理的结果调用PWM 生成模块和GPIO 输出模块,控制养殖船严格地按照设定的目标路径航行[7]。然后根据虾蟹饲喂专家系统数据库,给出虾蟹饲养周期内各单次投放量处方,养殖船自动地完成运动控制功能和作业控制功能。无人船智能管控平台控制流程如图3 所示。

图3 无人船智能管控平台控制流程
2.2 航迹自主规划与导航
在无人船智能管控平台中创建巡航任务,启动任务之后就可以在地图模块看到无人船所在的水域位置,点击添加水域的自主航线,航线的间距和大小都是前面我预先优化测绘设置好的。点击一键启动无人船就能够按照指定的规划线路按照相应的航行速度和航行方向进行自主巡航。同时进行投饵,水质监测等作业。当所有航线运行完毕之后无人船会回到我们的起点位置,整个作业过程可以实现自动化和无人化,大大提高养殖管理效率,降低人力成本。无人船规划航线与自主巡航作业如图4 所示。

图4 无人船规划航线与自主巡航作业
3 水质实时监测反馈
基于平台开发远程监测预警防治系统,通过无人船上的水质传感器,实时监测水质参数,对于监测过程中参数异常的水域,在后台地图模块直观显示并预警,同时调用对应水域的无人船开展有针对性的施药喷洒防治。本智能管控平台可以同时对接多条水域监测无人船,实施多水域集群化监测作业,为开展全自动水质监测技术设备的研发提供理论和实践参考。
3.1 水质数据实时监测反馈
无人船上设计有水质监测装置,水质监测仪自带电池和检测探头,探头伸入水体中测量当前水域的水温、溶氧量和PH 值,并通过无线网络将测量结果实时传输至地面端,实时监测反馈如图5 所示。该水质监测系统具有方便部署、低功耗、无人操作、少维护、远距离传输等特点。能够对养殖水域水质进行实时监测和调控,以实现增氧、投饵、施药等功能的精准化实施。

图5 氨氮及溶氧量实时监测数据反馈
3.2 历史水质数据参数对比
水质检测是评估养殖水体质量和环境污染程度的重要手段。然而仅仅对水质进行实时的监测并不足以提供完整的信息。对于大量的水质检测数据,合理的数据处理和分析方法是必不可少的。管控平台还可以调取水质历史数据进行参数对比,如图6 所示。对判断养殖水域水质情况提供丰富的数据参考。

图6 平台历史水质参数数据调取
3.3 水质异常预警
平台设置远程监测预警防治系统,通过无人船上的水质传感器,实时监测水质参数,对于监测过程中参数异常的水域,在后台地图模块直观显示并预警,如图7所示。同时调用对应水域的无人船开展有针对性的施药喷洒防治。
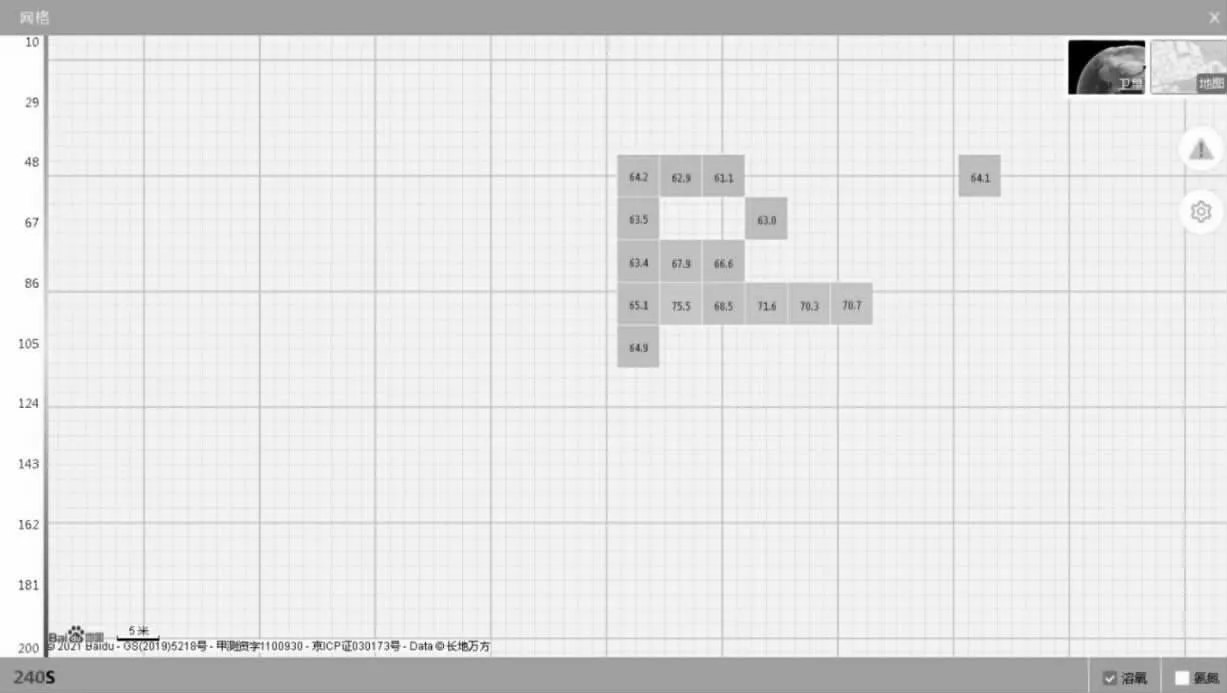
图7 水质异常水域云图形式预警
4 试验推广
在兴化、句容等地开展示范应用,示范应用面积100 亩以上, 节省饲料20%,节本增效15%。有效提升虾蟹养殖产业的效益。本无人驾驶虾蟹投饲自主作业船及智能管控平台适用于虾蟹规模化养殖基地。通过使用无人驾驶投饲作业船与智能料仓可以节省饲料成本,提高虾蟹产品品质和提高养殖效益,有非常大的市场空间。
试验推广过程中,无人驾驶虾蟹投饲自主作业船及智能管控平台,包括气力输送投饲机构、水下喷气式推进机构、作业船转向机构、作业船作业参数检测模块、作业船通讯模块、作业船能量管理模块等,实现按虾蟹生长需求精准饲喂,通过作业船与智能料仓的协同作业,自动充电,自动添加饲料, 实现无人驾驶作业船按预设路径自主行驶、转向、投饲、充电等功能。水域试验验证的主要技术指标为:
作业效率≥12.5 亩/h,连续服务能力≥50 亩,作业行走速度≥0.6 m/s,作业动力源为48 V 锂电池,电源续航时间≥4 h,智能料仓容量≥1 T;船载料仓容量150 kg,投饲作业宽幅4 m,锂电池充电时间≤4 h。推广试验如图8 所示。

图8 无人驾驶虾蟹投饲自主作业船及智能管控平台水域试验推广
5 结论
本无人驾驶虾蟹投饲自主作业船及智能管控平台可在每个水域控制一条自主导航水产养殖船,兼具智能补给、水塘施药和水质监测功能,同时解决了大规模多水域集群作业的投饵、施药、水质监测功能,可满足拥有多片水域的大规模水产养殖户的养殖作业,使水产养殖装备向着自动化、信息化、规模化、精确化方向发展,大幅降低人工成本,提高水产养殖效益,因此开发多水域自主作业水产养殖管控平台有着广阔的市场前景和开发潜力。
猜你喜欢
今日农业(2021年1期)2021-03-19
渔业致富指南(2020年16期)2020-12-18
渔业致富指南(2020年5期)2020-12-18
水上消防(2020年5期)2020-12-14
文史春秋(2019年11期)2020-01-15
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
智能城市(2018年7期)2018-07-10
新农村(浙江)(2018年5期)2018-05-31
岷峨诗稿(2017年4期)2017-04-20