基于无透镜衍射成像的猪精子三维轨迹提取方法研究
2024-02-22 09:48李国晓姜玥彤李晨曦武君伟
科学技术创新 2024年3期
李国晓,姜玥彤,李晨曦,武君伟
(1.江苏农林职业技术学院 信息工程学院,江苏 镇江;2.连云港立华牧业有限公司,江苏 连云港)
引言
在生猪养殖等领域,精液质量评估是促进生产的重要环节,其中一个重要指标——精子活力,是指精液中呈前进运动的精子所占的百分率。传统的手工分析方法是用显微镜进行观察,对精子运动情况进行人工判断和计数,该方法对检测人员要求高,主观性强,准确度低。随着图像采集和处理技术的快速发展,CASA(计算机辅助精子分析)被广泛应用[1],通过处理分析精子显微镜图像及视频,对精子运动特征进行量化,大大提高了自动化程度和客观性。其成像装置为相差显微镜,要求被测目标处于近轴区域的焦平面上,成像视野小、设备体积大、造价高。而且,所获得的精子运动情况是一种二维表现[2]。而事实上,精子是在三维空间中游动的,现有方法对其运动性能的评估不够科学。三维运动轨迹不仅是精子活力分析的重要依据,更是研究精子在特定物质作用下运动趋化性能的重要依据,具有重要的研究价值和应用前景[3]。
无透镜衍射成像技术,因其高通量、样本无需位于焦平面等特点,在生物细胞、细菌等微颗粒分析中展现出了独特的优势,已成功用于血细胞计数、细胞和微颗粒分类、细胞活性检测等。本研究提出了一种基于无透镜衍射成像技术的猪精子三维运动轨迹提取方法。与此同时,该方法自动化程度高,设备便携性强,设备造价大幅降低。
1 猪精子无透镜衍射成像原理和装置设计
1.1 成像原理
正常公猪的精子大约为45 μm,由头部和尾部组成,其中,头部呈透明的椭球状,其光学性能类似于一个凸透镜。猪精子无透镜衍射成像原理如图1(a)所示,精子个体在近似平面波的照射下,一部分从其周围的均匀介质透射过,另一部分从其内部透射过,其幅值和相位被调制,由于两部分透射光具有相同的初始相位,在成像平面上将发生稳定的干涉条纹,该条纹中必然蕴含生物样本的光学形态信息。为获得明显的干涉条纹,这要求入射光具有较好的空间相干性。激光具有较强的相干性,但其成像的散斑噪声严重。因此,一般将部分相干光源LED 发出的光经微米孔径调制,利用波阵面分割效应,提高其相干性。

图1 猪精子无透镜衍射成像原理及装置实物图
1.2 装置设计
所提出的猪精子三维运动轨迹提取装置,由一个精子无透镜衍射成像采集装置和内置控制分析软件的计算机组成。成像装置如图1(b)所示,光源和CMOS 成像模块被分别固定于两个微米级三维调节滑台上,通过调节滑台,确保光源、样本、CMOS 感光区域自上而下精确位于一条铅垂线上。采用650 nm 红色单色灯珠作为光源,封装在圆柱形套筒中,套筒下端中心处安装有激光加工的直径为50 μm 的微孔。采用型号为MT9F002(Micron Technology) CMOS 感光传感器,该传感器的像元尺寸为1.4×1.4 μm,成像区域尺寸为1/2.3-inch(4:3),分辨率460 8*328 8,其视场为400 倍率显微镜视场的数百倍。整个成像装置密封于不透光的光学暗箱中。
2 材料制备
为便于研究,我们对猪鲜精液进行了稀释,制成猪鲜精稀释溶液。选用健康种猪采集新鲜的精液,在37 ℃放置30 min 使其液化,从中取样本并振荡均匀,在完全液化为均匀水样物后使用移液枪从精液表面缓慢吸取5 微升,吸取50 μL 精液加0.95 mL 水配比变为1∶20 稀释溶液。精液密度过高时,将影响成像和分析。
3 无透镜成像分析和处理
通过调节三维滑台,对光源距离Z1、物像距离Z2进行精确设置,在成像传感器能够被透射光均匀覆盖时,成像效果较佳。在本研究中,最终确定较优的光源距离为50 mm,物像距离为1 mm。所拍摄的图像如图2(a)所示。
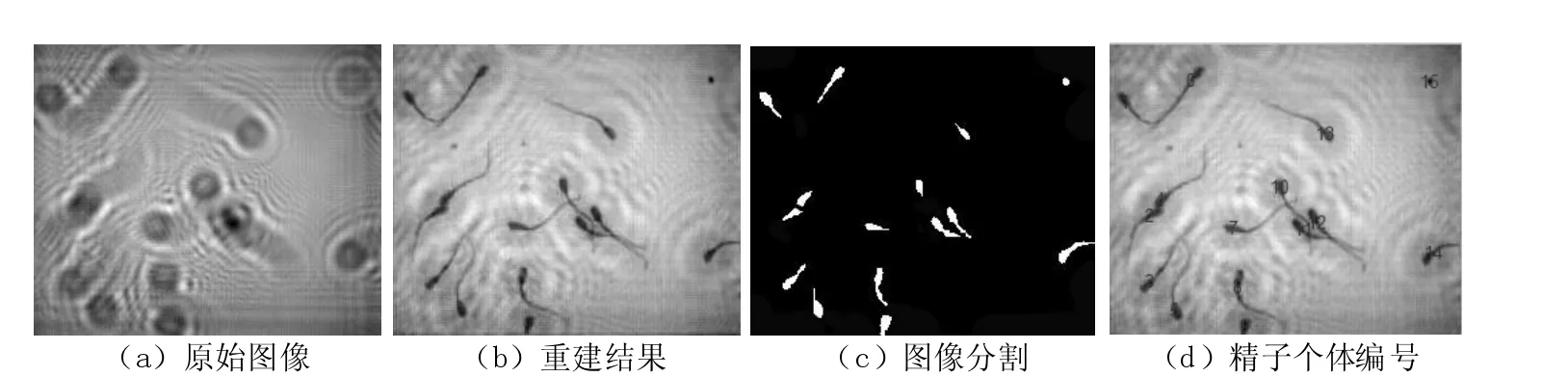
图2 无透镜图像重建和计数
3.1 重建算法
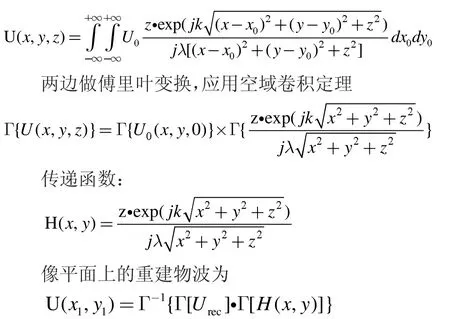
像平面上所获得的图案与生物微颗粒形态差别较大,需要对衍射图案进行重建,恢复物平面上的颗粒轮廓。重建的目标是根据光的衍射过程,再现物光波的分布。基于光学标量衍射理论[4],物平面在平面波照射下,在像平面形成光场分布,该光场继续向前传播同样的物像距离后,将得到实像和孪生像的叠加。本研究采用卷积法对进行重建。在菲捏尔近似条件下,再现像的复振幅分布为:
其中,C(x,y)表示再现像的复振幅分布,I(x,y)表示全息图的强度分布,再现距离为z1。利用瑞利- 索末菲衍射传递函数进行重建,衍射集分转化为傅里叶变换之间的卷积进行积分数值求解:
采用MATLAB 软件对获取的成像进行重建和处理。重建时,需根据装置实际情况设置相应的光学参数。此外,在衍射计算中,傅里叶变换具有区域限制,重建时首先将整幅衍射图像分割为200×200 像素的小块,进行小区域重建,然后再对重建图像进行拼接。重建结果如图2(b)所示。
3.2 编号和计数
采用图像处理算法进行图像分割,确定重建图像精子头部连通区域,进一步处理,如图2(d)所示,对视场内每一个精子个体进行编号和计数。
3.3 水平位置获取
在对原始无透镜成像进行重建和图像处理的基础上,得到精子头部所对应的联通区域,使用连通区域分析找到斑点的属性,对每个斑点的属性进行遍历,取目标区域的轮廓质心作为该个体的平面位置,记录下其质心坐标,通过与实际空间距离进行对应换算,则可得到精子个体的平面坐标,如图3(a)所示。

图3 猪精子个体平面坐标和垂直高度提取
3.4 垂直高度获取
在无透镜成像中,处于不同物平面上的目标都能够形成衍射条纹,所不同的是他们具有不同的物像距离,如图3(b),而物像距离正是重建计算时光场传递函数的重要参数。当该参数设置为与实际一致时,重建结果中实像与虚像的对比度达到最大,表现为具有更尖锐的边缘和更明显的轮廓。利用这一特点设计算法,通过建立聚焦度评价模型,则能够锁定样本颗粒的真实物像距离。
据此,我们基于图像梯度函数[5]设计了一个聚焦度评价模型。梯度函数常被用于评价边缘清晰度,边缘是像素值发生跃迁的地方,由于变化率大而导数值大。根据像素点相邻点灰度加权差在边缘处达到极值这一现象,引入Sobel 算子,Sober 算子包括两组3×3矩阵,通过在水平和竖直两个方向上分别进行一阶微分求导,得到图像在水平和竖直方向的梯度:
其中Gx(m,n)为像素点水平反向的梯度值,Gy(m,n)为像素点竖直方向上的梯度值。重建图像中边缘更加尖锐会导致边面与背景的差异较大而拥有更高的函数梯度值,像素点梯度值越大其越有可能是边缘。第(m,n)个像素多对应梯度值为:
在此基础上设计聚焦度评价函数以评价图像的边缘尖锐程度:
同时设计了一个自聚焦算法,通过对单个微颗粒重建过程中的物像距离参数不断调整,以聚焦度评价函数作为依据,最终锁定真实物像距离,如图3(c)所示,最终获得了同一视场下具有不同物像距离的微颗粒的三维分布情况。
3.5 运动轨迹提取
精子运动轨迹的提取过程如图4(a)所示,通过对无透镜衍射成像重建结果进行图像处理,可得到精子头部联通区域。根据成像视场,建立固定的三维坐标体系。根据视频流中的每一帧图像,提取指定编号精子在该时刻下对应x、y、z 轴三个坐标,将相同编号的空间坐标按照时间先后顺序进行连接,则可以描述出此编号猪精子在三维坐标轴上对应的运动曲线,其中编号为13 的精子的最终获取的运动轨迹如图4(b)所示。

图4 猪精子三维轨迹提取方法及结果
4 结论
基于无透镜成像技术的精子三维轨迹提取方法,其核心在于采集精子无透镜衍射成像,然后进行重建,辅以图像处理等技术,得到精子个体三维坐标。对高速摄影机拍摄的图像序列进行处理,生成运动轨迹,以高帧率和高分辨率记录精子的运动过程。在此基础上,可进一步计算精子的三维运动指标以及考察其行为特征,弥补了CASA 计算机辅助分析方法的不足。同时,其在实际应用中仍面临一些问题和挑战。例如,精子的运动速度和轨迹变化较快,对高速摄影和图像处理算法的性能有较高的要求。精子的形态和大小差异不大,如何准确识别和追踪特定精子也是一个挑战。针对以上问题,还需要持续改进,随着方法的进一步优化,其有望在精子质量评估和生殖医学研究中发挥重要作用。
猜你喜欢
中学生数理化·八年级物理人教版(2023年11期)2023-12-26
中学生数理化·八年级物理人教版(2022年11期)2022-02-14
中学生数理化·八年级物理人教版(2022年11期)2022-02-14
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
现代畜牧科技(2021年3期)2021-07-21
现代畜牧科技(2021年6期)2021-07-16
神州·下旬刊(2018年2期)2018-03-11
——可看得见的权利
太原学院学报(社会科学版)(2018年6期)2018-01-23
北方文学·下旬(2016年4期)2016-05-30
兽医导刊(2016年6期)2016-05-17