含实时电流补偿的开关磁阻式机电作动器自适应PI控制
2024-02-20 11:52:26龙云杜锦华布家宝梁得亮
西安交通大学学报 2024年2期
龙云,杜锦华,布家宝,梁得亮,2
(1. 西安交通大学电力设备电气绝缘国家重点实验室,710049,西安;2. 西安交通大学陕西省智能电网重点实验室,710049,西安)
气垫登陆艇具有强大的远程突袭能力,是现代两栖作战的核心技术装备[1-2]。转向叶片控制系统是气垫登陆艇的航向控制设备,对气垫登陆艇的机动性有着重要影响,其传统动力来源是液压作动器。近年来,考虑到液压作动器的控制精度和灵活性较差[3],使用机电作动器替代液压作动器具有良好的应用前景,其可以提高转向叶片系统的操控性,并降低系统复杂性和维护成本[4]。
目前机电作动器多采用永磁同步电机驱动[5-7],但永磁同步电机中含有永磁体,极易因战争环境中的高温和爆炸冲击发生退磁或者碎裂而失效[8-9]。相比于永磁同步电机,开关磁阻电机不含永磁体,其坚固的结构和天然的容错性可以提高系统在战争环境中的生存能力[10-11],因此气垫登陆艇的转向叶片系统更倾向于使用由开关磁阻电机驱动的机电作动器。不过开关磁阻电机的双凸极结构也使得电机存在很强的非线性和转矩脉动[12-13],且无法像永磁同步电机那样通过坐标变换解耦成线性系统进行控制[14],导致开关磁阻式机电作动器的位置跟踪控制更为困难。
目前开关磁阻式机电作动器的位置跟踪控制方法可大体上分为两类:经典的比例积分微分(PID)控制及其改进算法;基于现代控制理论和智能控制理论的新型控制方法。关于第1类控制方法,文献[15]首先使用三闭环比例积分(PI)控制器,验证了开关磁阻电机应用于机电作动器的可行性;在该方法的基础上,文献[16]提出了一种基于增益调度调节器的PID控制器,并通过阶跃响应实验验证了该控制器的有效性,不过其增益调度调节器的设计略显复杂,且没有考虑负载扰动的影响。关于第2类控制方法,已有学者将模糊控制和迭代学习控制应用于开关磁阻式机电作动器的位置跟踪控制[17-18],并显示出良好的控制效果。不过模糊控制的效果依赖于模糊规则知识库,知识库的获取对于工程经验不足的设计者是个挑战;而迭代学习控制更加适用于具有重复运动特点的被控系统,不太适用于跟踪位置变化剧烈且随机的转向叶片系统。文献[19]针对开关磁阻电机的位置跟踪控制提出了一种自适应反演控制方法,在跟踪正弦位置信号时取得了良好的控制效果。这种方法的核心是直接转矩控制,需要查找开关表,运算量较大。近年来,一些学者将自抗扰控制和模型预测控制应用于机电作动器的位置跟踪控制[20-22],取得了理想的控制效果。自抗扰控制通过扩张状态观测器对系统的总扰动进行观测,从而将控制对象转化为二阶积分器使用比例微分(PD)控制器进行控制,方法较为简单[23]。不过开关磁阻电机的非线性特性导致电机的模型信息难以被控制器利用,会导致扩张观测器的带宽较高,参数整定困难;模型预测控制同样依赖系统的模型信息而且计算量较大,对控制芯片的性能要求较高,这些问题制约了两种控制器在实际工程中的应用。
为兼顾开关磁阻式机电作动器的位置跟踪性能和工程应用的可靠性与可行性,本文提出了一种含实时电流补偿和自适应PI控制器。该控制器在电流环设计了基于负载观测器的实时电流补偿环节来提高系统的抗扰性能;在转速环采用自适应PI来削弱开关磁阻电机的非线性,从而提高机电作动器中开关磁阻电机的转速调节性能;并在位置环引入前馈环节来提高机电作动器的响应速度。相比于常规PI控制器,所提控制器的运算量增加不大,工程适用性较好。最后,通过仿真与实验对比分析了4种位置控制器的性能,证明了所提控制器能有效控制开关磁磁阻式机电作动器进行位置跟踪,且相比于其他3种控制器响应速度更快,位置跟踪精度更高。
1 转向叶片系统的数学模型
气垫登陆艇的转向叶片系统如图1所示,主要包括作动器,转向叶片以及推进风扇。系统通过作动器驱动转向叶片偏转来改变推进风扇的气流方向,从而控制气垫登陆艇的行进方向。

图1 气垫登陆艇的转向叶片系统Fig.1 The steering vane system of the LCAC
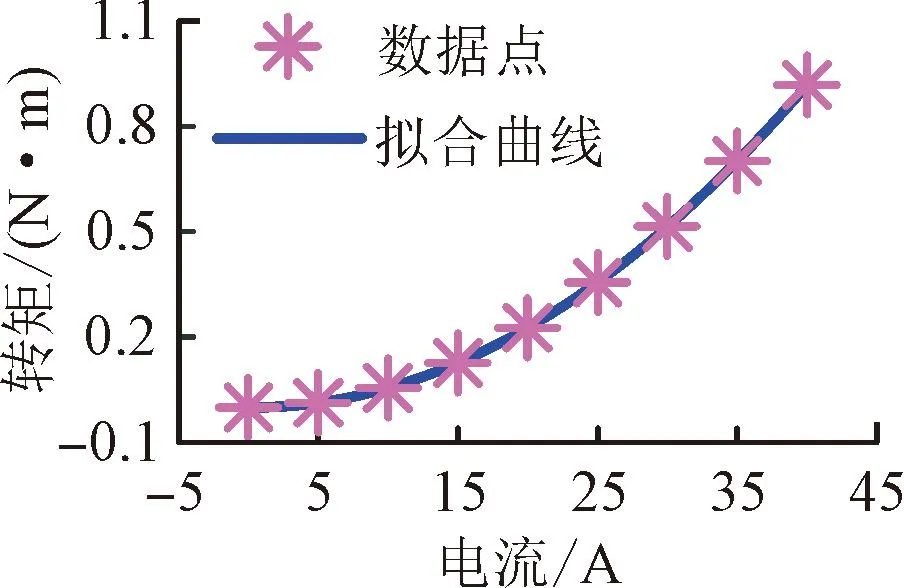
转向叶片系统的工作原理如图2所示。其中开关磁阻式机电作动器主要由开关磁阻电机、滚珠丝杠副、端环、旋转变压器和线性可变差动变压器(LVDT)组成,其中旋转变压器用来测量开关磁阻电机的转速和转角,LVDT 变压器用来测量作动器端环的直线位移。机电作动器的端环通过摇臂与转向叶片连接,其直线位移决定了转向叶片的偏角。为描述转向叶片系统的主要特征,忽略间隙,弹性形变等非线性因素的影响,转向叶片系统中开关磁阻式机电作动器的数学模型如下。
机电作动器中开关磁阻电机的数学模型
(1)
式中:U、R、ik和ψk分别为开关磁阻电机的电压、相电阻、第k相的电流和磁链;Te、θ、ω、Jm、Bm分别为开关磁阻电机的电磁转矩、转动角度、转动速度、转动惯量和旋转阻尼系数。
机电作动器中滚珠丝杠副的数学模型
(2)

转向叶片系统的负载模型
(3)

由于转向叶片的偏转角度较小,所以其偏转角度和机电作动器的位移约成正比,即
φ=σx
(4)
式中:σ为偏转角度和作动器位移间的比例系数。
综合式(1)~(4),可得机电作动器的数学模型
(5)

2 位置控制器设计及其参数整定

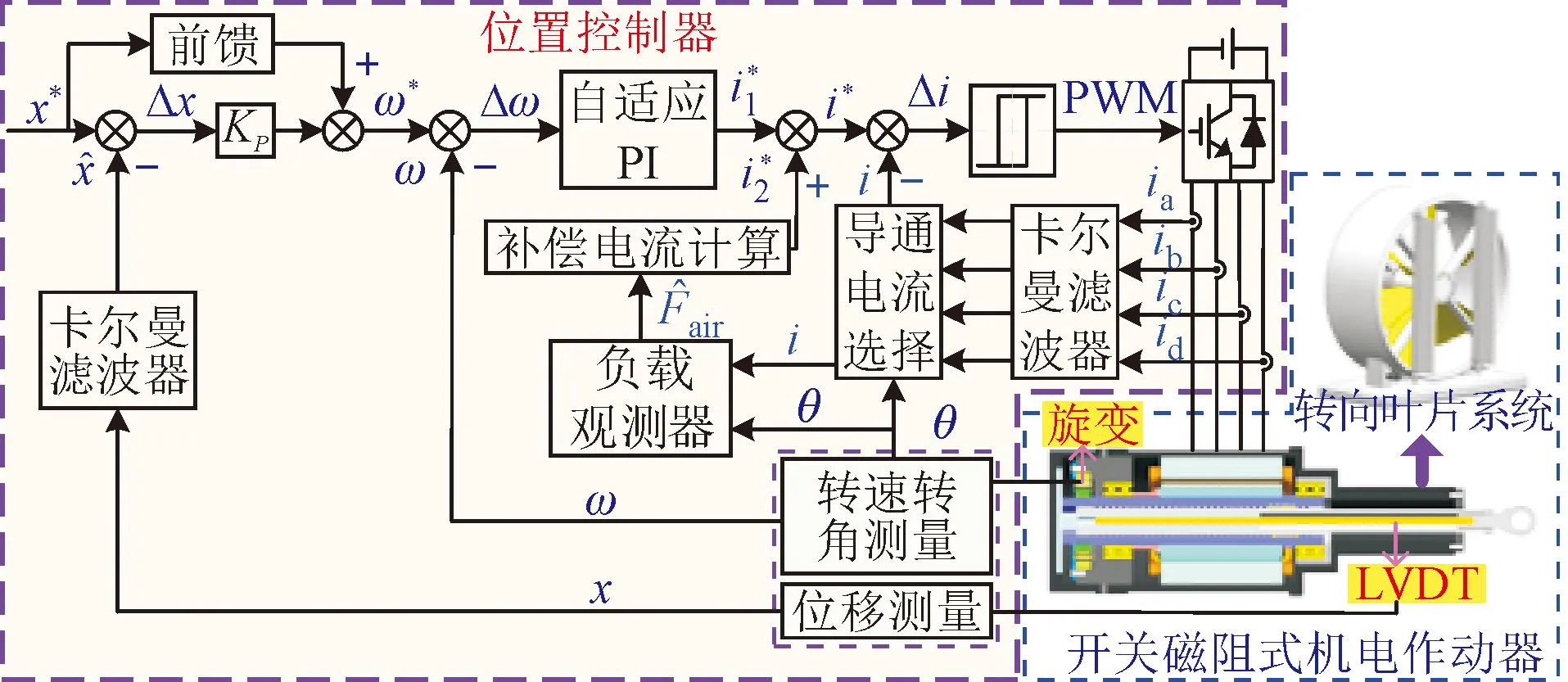
图3 开关磁阻式机电作动器控制框图Fig.3 The control block diagram of the SRM-based EMA
2.1 含实时电流补偿的电流调节器

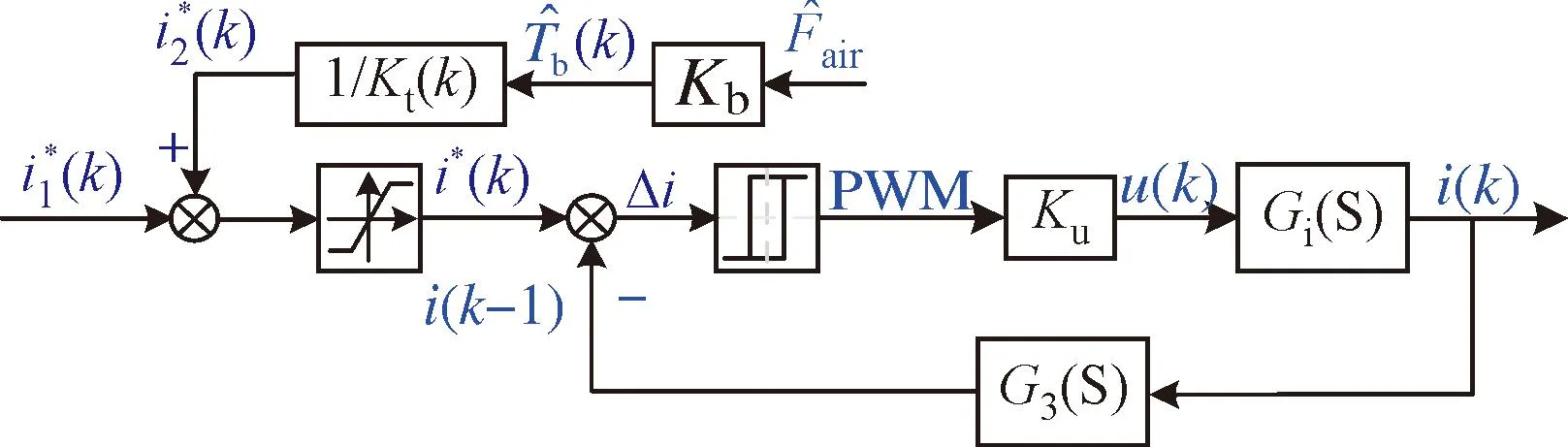
图4 含实时电流补偿的电流环的控制框图 Fig.4 The control block diagram of the current loop with the real-time current compensation
2.1.1 电流斩波控制环节设计
(6)
式中:Tc为延迟时间;Lmax、Lmin分别为开关磁阻电机定转子齿在对齐和不对齐位置时的相电感;IN为开关磁阻电机的额定电流值。
2.1.2 实时电流补偿环节设计
电流实时补偿环节需要使用负载观测器得到施加于转向叶片上的空气动力值。其表达式为
(7)

(8)
相比于不含电流补偿的常规PI控制器,在对电流环的给定电流进行实时补偿后,机电作动器的阶跃响应曲线和伯德图分别如图5、图6所示。

图5 机电作动器中负载扰动的阶跃响应曲线Fig.5 The step response curve of the load disturbance

图6 机电作动器中负载扰动的伯德图Fig.6 The Bode diagram of the load disturbance
图5表明含电流补偿的位置控制器相比于不含电流补偿的位置控制器,由负载扰动引起的位置变化很小。图6所示的伯德图进一步证明了该现象,图中含实时电流补偿的控制器的幅值衰减更大,相位滞后更小,表明基于负载观测器的实时电流补偿环节可以降低负载扰动对位置跟踪的影响。
2.2 基于自适应PI控制的转速调节器
机电作动器所用开关磁阻电机的转矩与电流和转角的关系如图7(a)所示,可知当开关磁阻电机的转角处于9°~24°时,即电机转子齿与定子齿基本对齐时,电机的转矩基本稳定。由于电流斩波控制器的开通关断角恒定,因此开关磁阻电机的转矩只与电流相关。取转角9°~24°的转矩平均值来表示电流所对应的转矩,可得开关磁阻电机平均转矩与电流间的关系如图7(b)所示。

(a)转矩-电流-转角曲线
(b)平均转矩-电流曲线
通过多项式拟合方法,可得机电作动器中开关磁阻电机的转矩-电流表达式
Te=Kti=(ai+b)i
(9)
式中Kt不是一个常数,而是一个与电机实时电流值相关的变量,故可用Kt(i)表示。
为了提高机电作动器的转速调节性能,转速调节器采用自适应PI来削弱开关磁阻电机的非线性。具体方法是基于开关磁阻电机的实时反馈电流对比例参数Kω进行自适应调节,将其转化为一个与电流相关的量Kω(i),从而抵消变量Kt(i)的影响。基于上述分析可得转速环的控制框图如图8所示,图中Gc(s)为电流环的传递函数,Gm(s)为开关磁阻电机的电磁转矩与转速的传递函数,记为
Gm(s)=1/(Jms+Bm)=Km/(Tms+1)
(10)
式中:Km=1/Bm;Tm=Jm/Bm;G2(s)为转速采样环节,将其视为延迟环节,记为G2(s)=1/(T0s+1),其中T0为转速采样的延迟时间。转速调节器GASR(s)采用自适应PI控制,传递函数记为
(11)
式中:Kω(i)、τω分别为比例系数和积分系数。

图8 机电作动器转速环的控制框图Fig.8 The control block diagram of the speed loop
上述参数中,Kω(i)、Kt(i)的值均为和开关磁阻电机实时电流相关的变量。将转速环中除转速调节器GASR(s)外的环节合并,可得机电作动器转速环控制对象的开环传递函数
Gω(s)=Gc(s)Kt(i)Gm(s)G2(s)=
(12)
式(12)中,由于Tc、T0远小于Tm,故将电流和转速采样环节合并,使TΣ=Tc+T0。因为在位置跟踪控制中要求转速调节的快速性较好,故令τω=Tm,从而使转速调节器中的τωs+1项抵消开关磁阻电机的大惯性环节Tms+1。这样便把转速环校正为典型的Ⅰ型系统,其开环传递函数可改写为
(13)
式中:Kw=KmKt(i)Kω(i)/τω。根据文献[25]给出的工程参数整定法,系统阻尼比为0.707时,系统可以较好地兼顾转速响应的快速性和超调,此时KwTΣ=0.5,故参数Kω(i)的值为
(14)
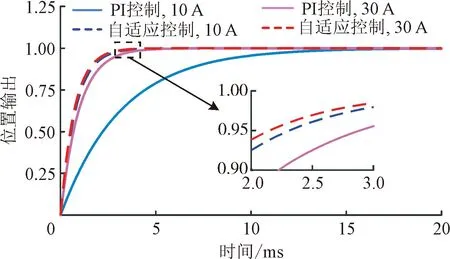
图9 机电作动器中转速环的阶跃响应曲线Fig.9 The step response curve of speed loop
相比于恒定参数的常规PI控制器,在考虑开关磁阻电机的非线性特性并使用自适应PI控制器对转速进行调节后,开关磁阻电机转速的阶跃响应曲线和伯德图分别如图9、图10所示。从图9可以看出,PI控制器和自适应PI控制器都可以使转速的阶跃响应不出现超调现象,但自适应PI相比于常规PI控制器的响应速度更快,并在电机的电流为10、30 A时,转速响应性能几乎相同,而PI控制器的转速响应性能在两个电流状态下存在明显差别。从图10可以看出,自适应PI控制器对转速的控制性能受电流大小的影响很小,而且幅值衰减和相位滞后都更小。因此,自适应PI可以有效削弱开关磁阻电机非线性特性对机电作动器转速控制的不利影响,且相比于常规PI控制器具有更快的转速响应性能。
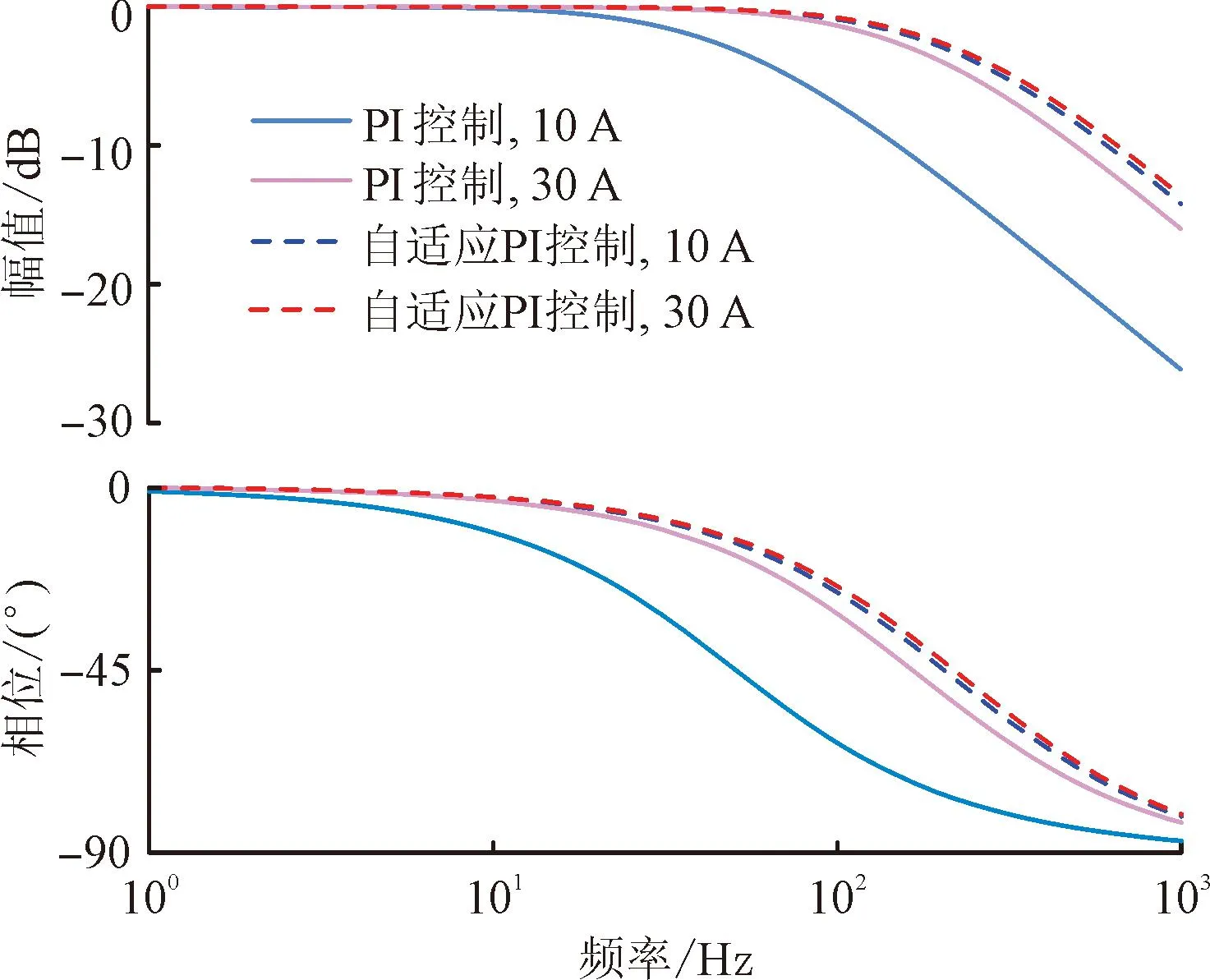
图10 机电作动器中转速环的伯德图Fig.10 The Bode diagram of EMA speed loop
2.3 含前馈环节的位置调节器
根据所设计的开关磁阻式机电作动器的转速调节器,可知速度环的闭环传递函数为
(15)
由于TΣ的值远小于Kw,故式(15)可简化为
Φw(s)=[Kw(T0s+1)]/(s+Kw)
(16)
在常规PI控制器中,位置环通常采用比例控制,虽然可以保证阶跃响应的超调较小,但也会导致响应速度较慢,难以跟踪变化较快的位置信号,因此本文所提控制器在位置环中引入了前馈环节来提高响应速度,其控制框图如图11所示。图11中,GF(s)为前馈环节,GAPR(s)为位置调节器,Gb(s)为滚珠丝杠副的传递函数,记为Gb(s)=δ/s。G1(s)为位置采样,其传递函数为G1(s)=1/(T0s+B)。因此,位置环控制对象的开环传递函数可写为
Gp(s)=Φw(s)Gb(s)G1(s)=
(17)
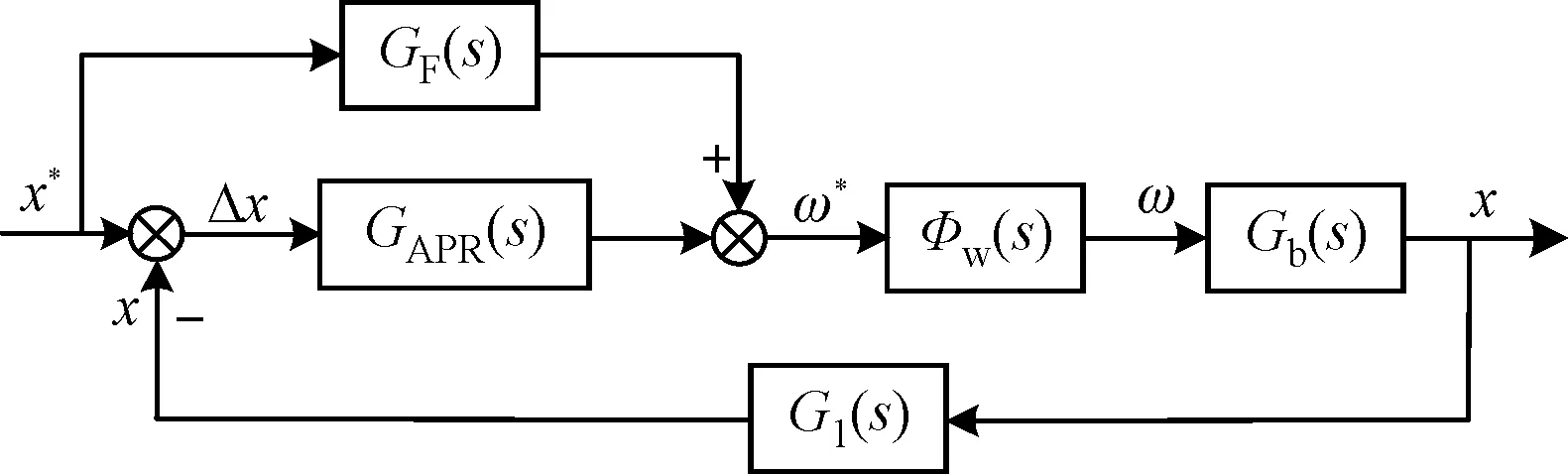
图11 机电作动器位置环的控制框图Fig.11 The control block diagram of the position loop
机电作动器位置环的控制对象是典型的Ⅰ型系统。为使系统能实现恒定位置跟踪且保证无稳态误差,由于位置调节器采用比例控制,故有
(18)
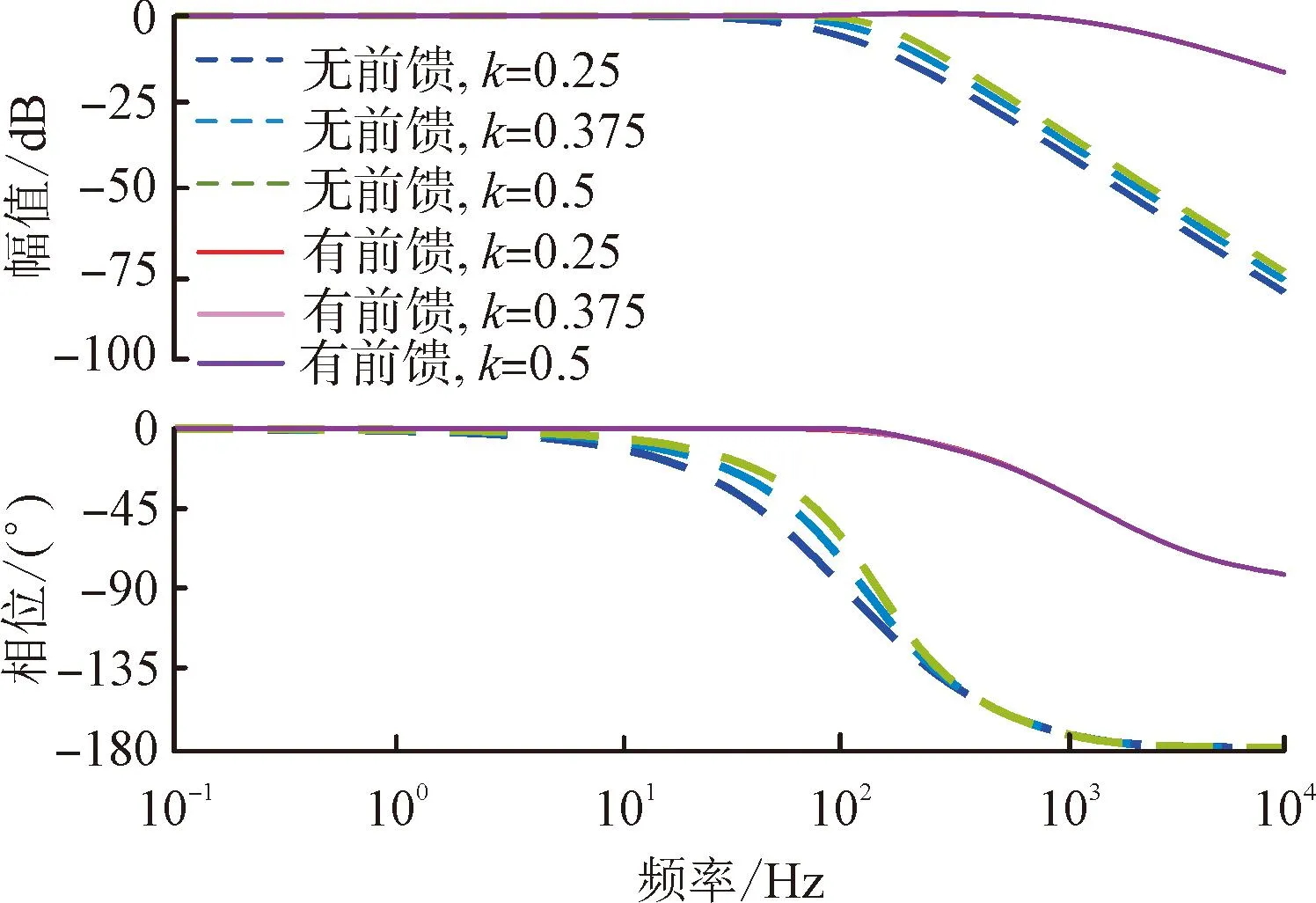
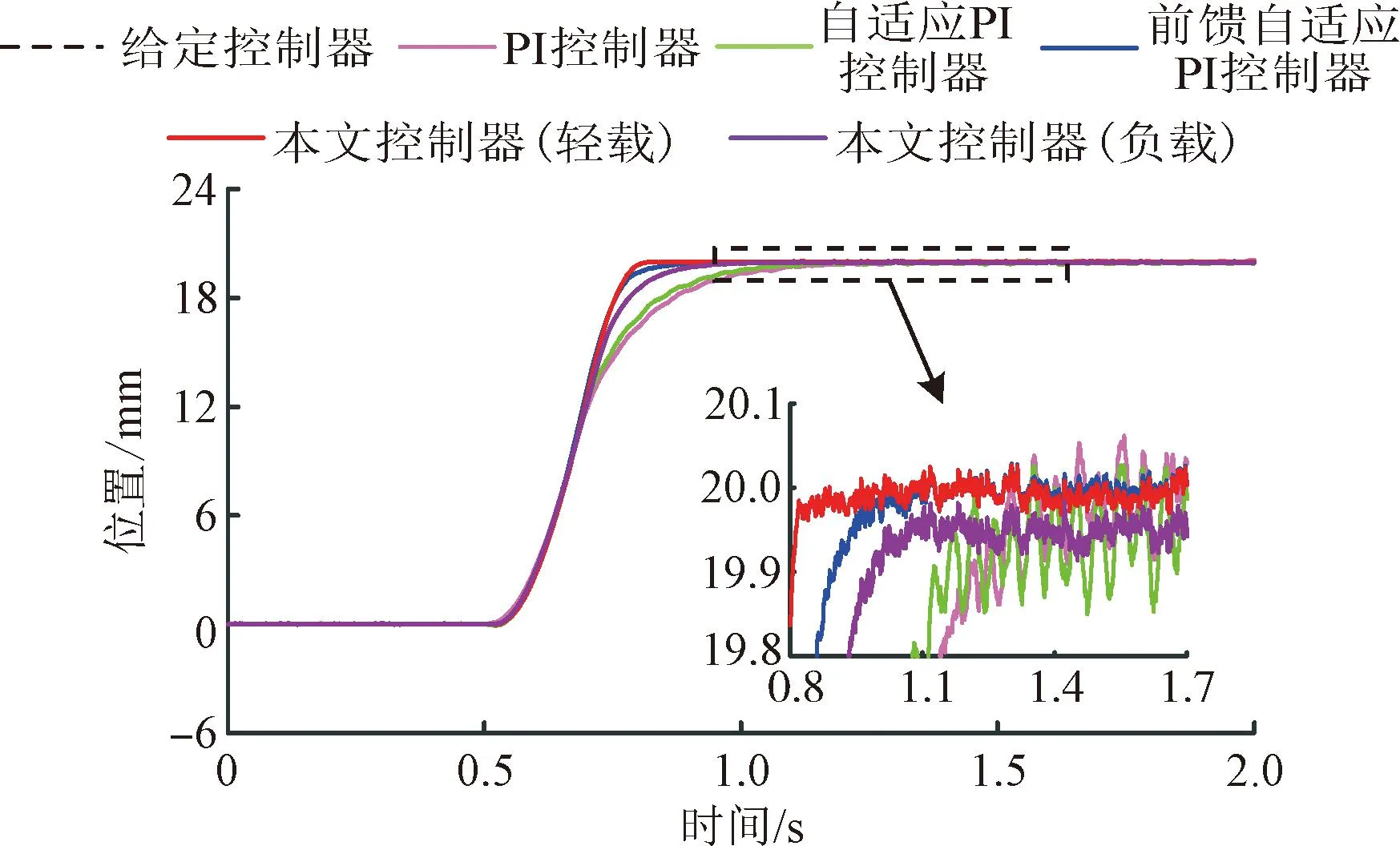
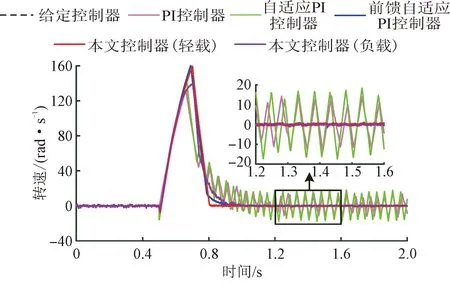
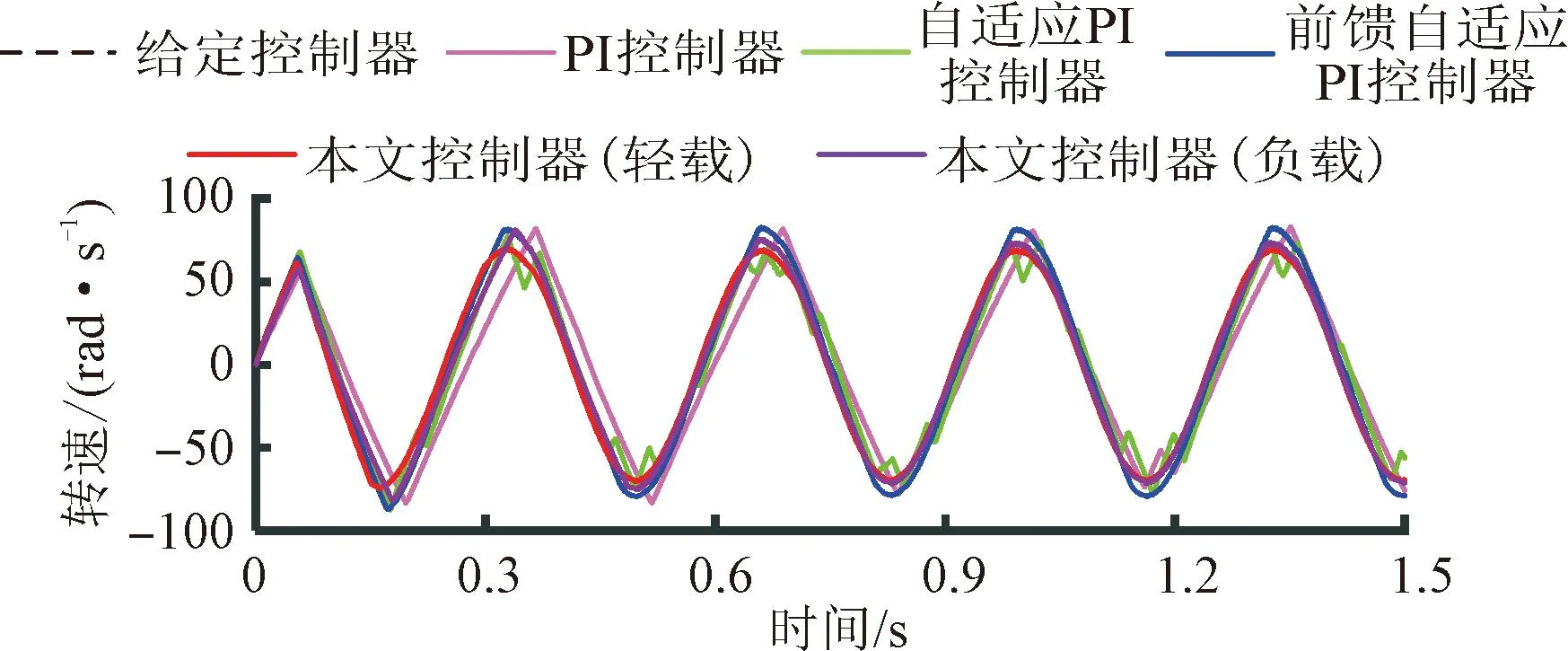
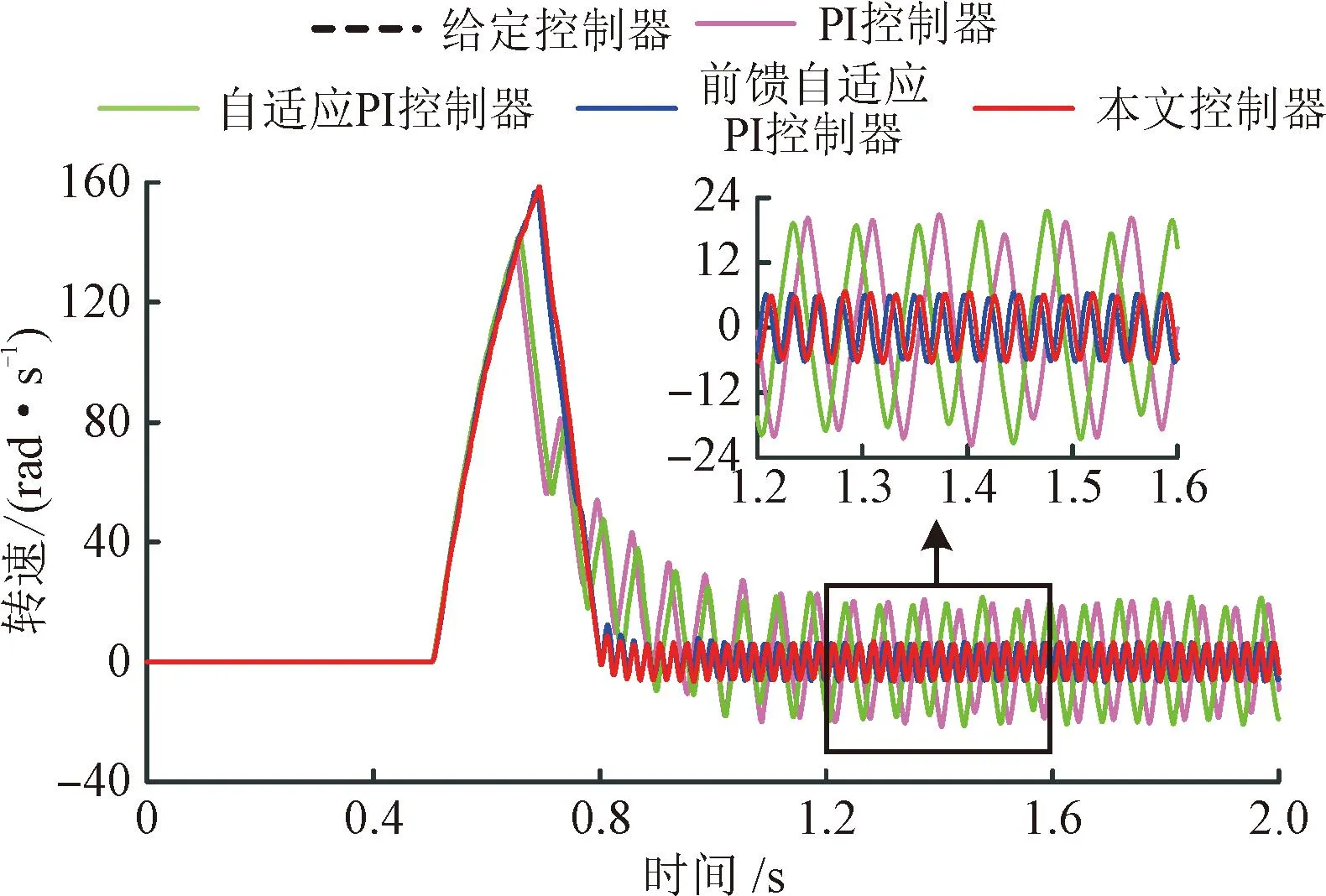
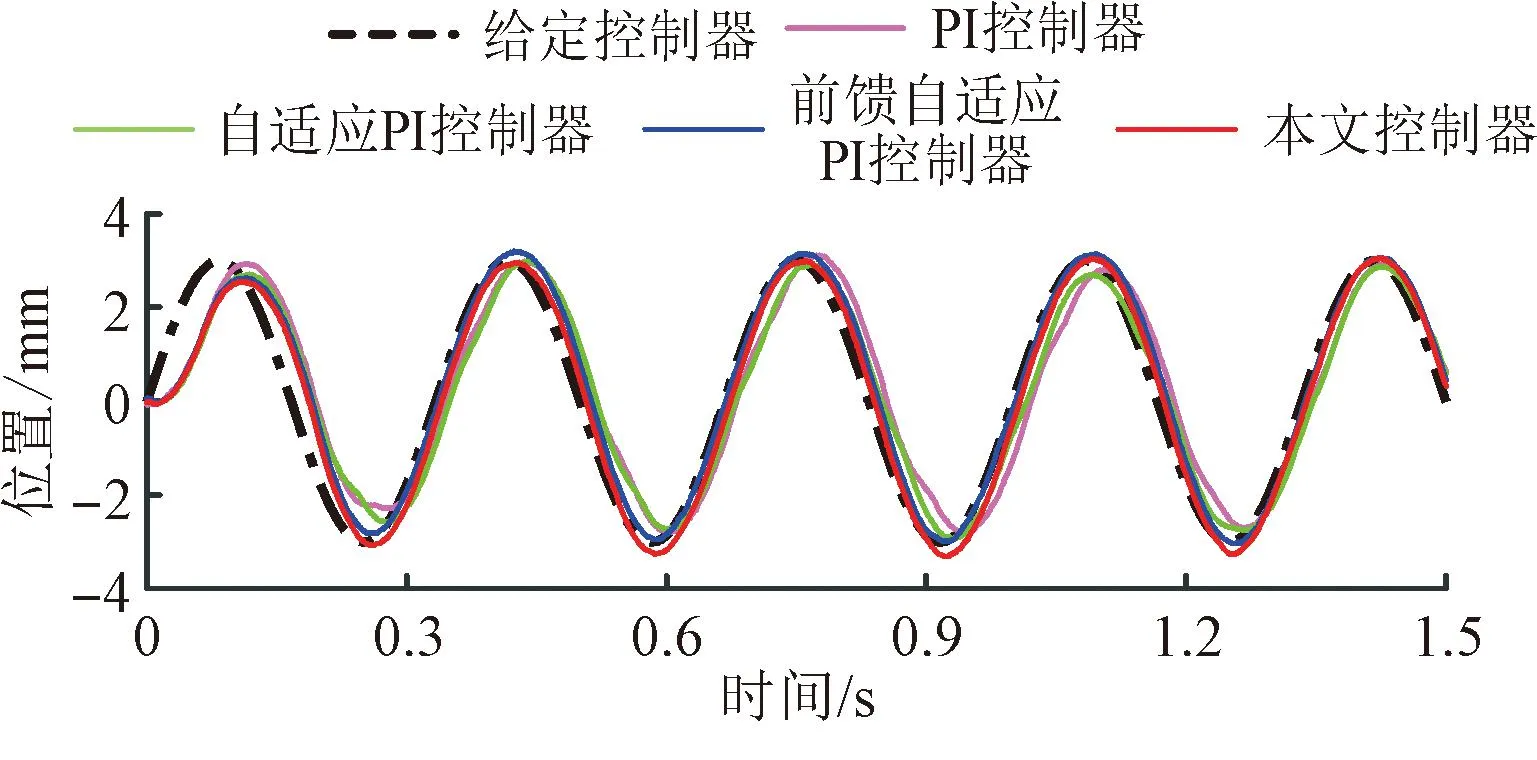
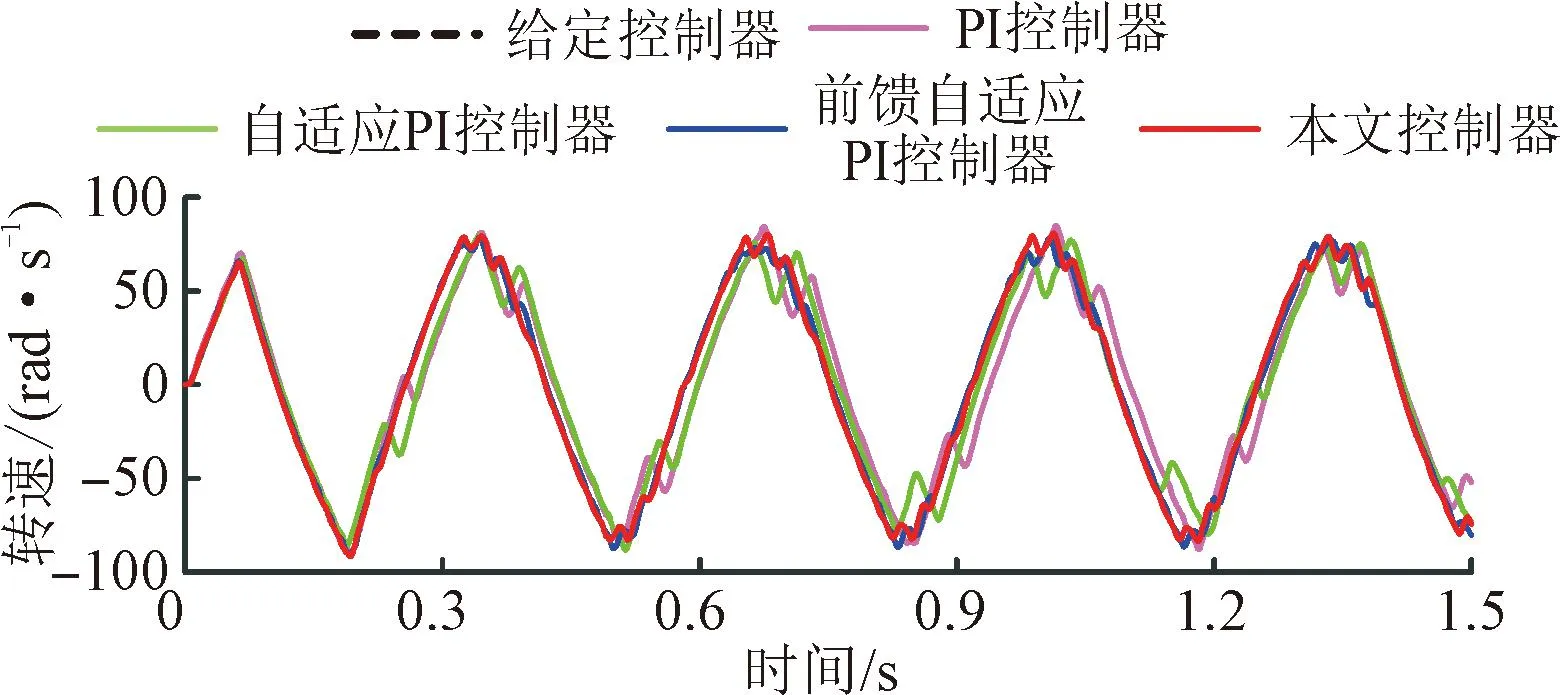
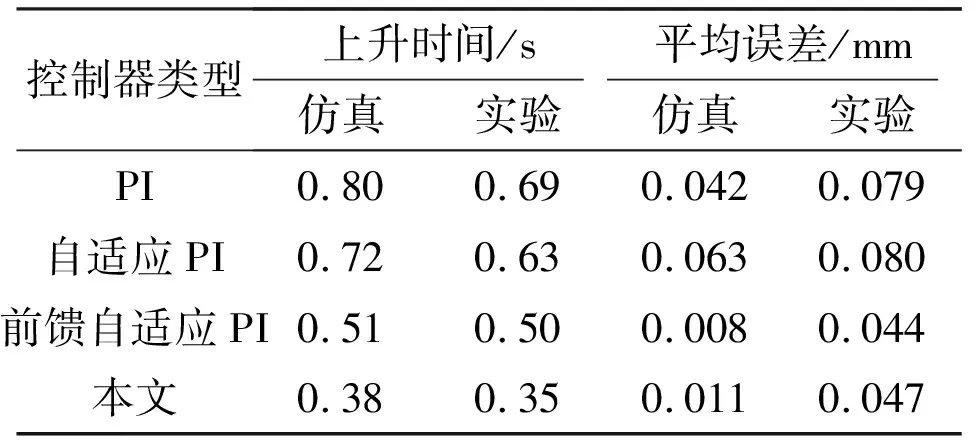
式中:Kp为位置调节器的比例系数。根据文献[25]中典型Ⅰ型系统的参数整定方法,位置调节器的值Kp=Kwk/δ,其中0.25 (19) 为提高机电作动器的位置响应速度,在位置环中引入前馈环节后系统的闭环传递函数变为 (20) 为使开关磁阻式机电作动器能够完全跟踪给定的位置信号,令Φp(s)=1,代入式(20),可得 (21) 当开关磁阻式机电作动器的位置环引入前馈环节后,机电作动器位置环的阶跃响应和伯德图分别如图12、图13所示。从图12可以看出,开关磁阻式机电作动器的位置环在引入前馈环节后虽然会导致位置的阶跃响应有少许超调,但可以显著提高位置响应速度。此外,位置环在引入前馈环节后,k的值对机电作动器位置响应性能的影响不再明显,但k的值越小超调越小,所以k取0.25较为合适。从图13可以看出,引入前馈环节可以显著减小机电作动器在正弦位置信号跟踪时的幅值衰减和相位滞后。 图12 机电作动器中位置环的阶跃响应曲线Fig.12 The step response curve of position loop 图13 机电作动器中位置环的伯德图Fig.13 The bode diagram of EMA position loop 为验证本文所提位置控制器的有效性和优越性,对比分析了常规PI控制器、考虑开关磁阻电机非线性特性的自适应PI控制器、含位置前馈的自适应PI控制器以及所提基于实时电流补偿和自适应PI的位置控制器,在开关磁阻式机电作动器阶跃响应和频率响应上的位置跟踪性能。其中机电作动器阶跃响应和频率响应的性能要求如表1所示,转向叶片系统的参数由表2所示,所提位置控制器的参数由表3所示。由于机电作动器的直线位移与转向叶片的偏转角度基本相等,且机电作动器测量直线位移的LVDT变压器具有较高的测量精度,故选用机电作动器的直线位移作为控制变量。 表1 开关磁阻式机电作动器的性能指标 表2 转向叶片系统参数 表3 位置控制器参数 搭建了基于4种控制器的转向叶片系统仿真模型,对转向叶片系统中开关磁阻式机电作动器的阶跃响应和频率响应特性进行了如下仿真分析。 3.1.1 阶跃响应仿真 给定20 mm的恒定位置信号,机电作动器在4种控制器控制下的阶跃响应曲线如图14所示。 (a)位置跟踪曲线 (b)阶跃响应转速曲线 图14(a)所示的位置跟踪曲线表明4种控制器均可以使机电作动器在0.8 s内到达给定位置,且超调量均小于0.1 mm,满足阶跃响应的性能指标要求。不过所提控制器使机电作动器具有最快的响应速度。从图14(a)可以看出,4种控制器的响应速度越来越快,证明了实时电流补偿环节,基于开关磁阻电机非线性特性的自适应PI以及位置前馈环节均有效提高了开关磁阻式机电作动器的响应速度。此外,放大图还表明PI控制器和自适应PI控制器相比于前馈自适应PI控制器和所提控制器使机电作动器在到达给定位置后产生了较为明显的位置波动。这是由于后两种控制器可以通过位置前馈环节较好地预测给定位置信号的未来趋势提前做出了补偿控制。图14(b)表明,PI控制器和自适应PI控制器使机电作动器在到达给定位置后的转速调整非频繁且转速波动较大,而后两种控制器的转速波动则非常微小,可知位置前馈环节可以有效减小机电作动器转速调整的幅度,从而减小机电作动器的稳态跟踪误差。 3.1.2 频率响应仿真 给定频率为3 Hz、幅值为3 mm的正弦信号,机电作动器的阶跃响应曲线如图15所示。从图15(a)可以看出:除常规PI控制器外,其余3种控制器的幅值衰减均不超过3 dB,相位滞后不超过30°;其中所提控制器的正弦信号跟踪性能最好。PI控制器和自适应PI控制器的幅值衰减和相位滞后较为明显,不过自适应PI控制器的性能要好于PI控制器,而前馈自适应PI控制器则有少许超调。对照图15(b)所示的位置跟踪误差曲线,可知PI控制器的位置跟踪误差波动最大,而所提控制器的位置跟踪误差波动最小,且4种控制器的位置跟踪误差依次递减。这是由于PI控制器的参数是根据开关磁阻电机的线性模型整定的,与真实模型的偏差较大;而PI控制器本身受模型精度的影响较大,故位置跟踪误差最大。而所提控制器中的实时电流补偿环节,自适应PI和位置前馈环节均可以有效提高开关磁阻式机电作动器的频率响应性能,所以其位置跟踪误差最小。图15(c)表明,4种控制器的转速变化幅值基本接近。不过,相比于前馈自适应PI控制器和所提控制器,PI控制器的转速响应曲线较为滞后,在波峰波谷处的过渡非常迅速,呈现三角形状,而自适应PI控制器则在波峰波谷处有明显的小纹波,两种控制器在该位置进行了较大幅度的转速调节。这是由于这两种控制器缺少位置前馈环节的预测作用而必须基于实时误差进行快速调节而导致转速超调,因此前馈自适应PI控制器和所提控制器因为具有位置前馈环节而使得机电作动器的转速调节更为迅速和平滑。 (a)位置跟踪曲线 (b)位置跟踪误差曲线 (c)频率响应转速曲线 为验证所提控制器的有效性,搭建了图16所示的实验平台,其主要由开关磁阻式机电作动器、工控机、dSAPCE控制器、直流电源、驱动柜、信号解码器、电流钳和模拟转向叶片组成。其中dSPACE为系统的主控制器,控制频率为10 kHz,直流电源的电压为28 V,驱动柜采用不对称半桥电路,信号解码器负责对机电作动器中旋转变压器的转速转角信号和LVDT变压器的直线位移信号进行解码,并反馈到dSPACE控制器中,从而对机电作动器进行控制。电流钳负责机电作动器的电流信号采样,所有信号的采样频率与控制频率相等,均为10 kHz。实验数据由dSPACE控制器的在线进行界面观测和记录。 图16 转向叶片系统实验平台Fig.16 The experimental platform of steering vane system 3.2.1 阶跃响应实验 4种控制器阶跃响应的实验结果如图17所示。 由图17可以看出,实验结果与仿真分析的结果基本一致,即4种控制器操纵下开关磁阻式机电作动器的位置跟踪性能依次增强,且所提控制器具有最好的阶跃响应性能。图17(a)验证了实时电流补偿环节和转速环自适应PI和位置前馈环节可以较好地减小机电作动器到达给定位置后的位置波动。图17(b)转速响应曲线与图14相似,同样表明前馈自适应PI和所提控制器可以使机电作动器具有更快的响应速度,且使作动器在到达给定位置后的转速波动更小,这有利于降低开关磁阻式机电作动器的稳态跟踪误差,降低工作时的振动与噪声,这一现象可以在实验时明显发现。 (a)位置跟踪曲线 (b)阶跃响应转速曲线 3.2.2 频率响应实验 4种控制器频率响应的实验结果如图18所示。 (a)位置跟踪曲线 (c)频率响应转速曲线 与仿真结果相似,图18(a)表明:PI控制器和自适应控制器对机电作动器的控制效果较差,相位滞后相比于前馈自适应PI控制器和所提控制器更为明显;而且PI控制器控制下的位置跟踪波形在波谷位置的畸变较自适应PI控制器更为严重,这表明转速环自适应PI调整环节具有较好的转速调整性能,可以使开关磁阻式机电作动器的动态响应性能更好。图18(b)表明,4种控制器的位置跟踪误差呈依次递减现象。其中所提控制器具有最小的跟踪误差和最好的正弦信号跟踪性能,而PI控制器的位置跟踪误差最大,不过相比于仿真结果要小,其主要原因是实验系统与仿真模型的存在差异,尤其是实验系统在低速时的摩擦力要明显高于仿真模型。从图18(c)可以看出,PI控制器和自适应PI控制器的转速响应相比于前馈自适应PI控制器和所提控制器要滞后,且在波峰波谷位置的转速波动幅值也更大。这与仿真结果一致,均表明了位置前馈环节有利于增强开关磁阻式机电作动器的动态调整性能,使作动器的运行更加平稳。 仿真分析和实验结果的对比如表4、表5所示。根据表4中上升时间和表5中平均误差的实验数据可知:相比于前3种控制器,所提控制器的响应速度分别提高了49.3%、44.4%和30.0%,位置跟踪精度分别提高了54.8%、49.2%和2.9%,表明所提控制器具有最优的位置跟踪性能。这是因为自适应PI控制器考虑了开关磁阻电机的非线性特点,可以使机电作动器根据开关磁阻电机的磁饱和状态选择最优的参数对转速进行调节,故使得自适应PI控制器的响应速度相比于PI控制器更快。相比于自适应PI控制器,前馈自适应PI控制器增加了位置前馈环节,可以根据给定位置信号的变化趋势提前做出补偿然后进行转速调节,因此该控制器进一步提高了机电作动器的响应速度并有效减小了开关磁阻电机的转速波动。相比于前3种控制器,所提控制器还考虑了负载扰动的影响,通过引入基于负载观测器的实时电流补偿环节,所提控制器使开关磁阻式机电作动器较好地克服负载扰动的不利影响,使开关磁阻式机电作动器的动态响应性能更好,位置跟踪精度更高。这证明了所提控制器中基于负载观测器的实时电流补偿环节,转速环自适应 PI 和位置前馈环节的有效性。 表4 机电作动器阶跃响应的仿真实验结果 表5 机电作动器频率响应的仿真实验结果 为了使转向叶片系统中开关磁阻式机电作动器获得较好的位置跟踪性能,从而增强气垫登陆艇的机动性,提出了一种含实时电流补偿和的自适应PI控制策略,并给出了其设计和参数整定方法。基于仿真和实验结果,得到以下结论。 (1)基于机电作动器中开关磁阻电机的非线性特性,通过对控制器转速环的PI参数进行自适应最优调节,可有效提高机电作动器的响应速度。 (2)通过在控制器引入位置前馈环节和实时电流补偿环节,可以进一步提高开关磁阻式机电作动器的响应速度并减小其转速波动,从而有效提高机电作动器的位置跟踪精度。 (3)所提含实时电流补偿的自适应PI控制器可以有效控制开关磁阻式机电作动器以较快的速度和较高的精度跟踪恒定位置信号和正弦位置信号,满足转叶片系统的动态性能要求。
3 仿真分析与实验验证


3.1 仿真分析


3.2 实验验证


3.3 仿真与实验结果的比较分析

4 结 论
猜你喜欢
电子设计工程(2022年15期)2022-08-17 10:07:16
防爆电机(2021年4期)2021-07-28 07:42:46
装备制造技术(2020年9期)2021-01-26 00:14:42
光通信研究(2020年2期)2020-06-15 07:42:58
科技创新与应用(2019年17期)2019-06-09 08:38:29
西安航空学院学报(2017年3期)2017-07-05 14:58:36
电子设计工程(2017年20期)2017-02-10 03:40:05
北京航空航天大学学报(2016年2期)2016-12-01 03:00:27
电机与控制应用(2015年1期)2015-03-01 03:49:08
浙江大学学报(工学版)(2015年8期)2015-03-01 01:19:26