引入电流有效值与相位突变量判据的零序反时限电流保护
2024-02-20 11:52鲁晓毅郑涛代钰欣杨畅宋宇飞
西安交通大学学报 2024年2期
鲁晓毅,郑涛,代钰欣,杨畅,宋宇飞
(西安交通大学电气工程学院,710049,西安)
输电线路接地短路的后备保护一般采用接地距离保护和零序电流保护。接地距离保护具有保护范围受运行方式影响小[1-2]、较好的选择性等优点,但固有缺陷是耐受过渡电阻的能力有限,在应对高阻接地故障时灵敏性不足,因此必须配备零序电流保护。目前,利用零序电流构成的后备保护在大接地电流系统中已得到广泛应用[3-11]。其中,传统阶段式定时限零序过流保护的原理及构成简单,但整定计算受电网运行方式影响较大,且选择性配合困难,存在单一故障导致大范围多条线路无序动作的风险[12-13]。由于反时限电流保护具有“电流越大、动作越快”的特点,当相邻线路短路电流大小存在差异时,反时限电流保护能自然实现上下级保护选择性配合,因此逐渐得到了广泛应用[14-17]。
在实际应用中,全网零序反时限保护选择同一种反时限特性和统一定值[18],大部分情况下能够保证选择性。然而,当同杆双回线中某条线路发生故障时,相邻非故障线路流过的零序电流可能大于故障线路的零序电流,零序反时限电流保护将发生误动。针对此问题,文献[19-20]提出了基于广域信息的改进算法,引入算子调整保护动作时间,但该方法需要采用广域信息,即涉及通信问题,对于后备保护而言实现难度大且成本较高。文献[21-22]基于零序功率方向,通过改变时间整定系数对故障线路的保护进行加速动作,实现了相邻线路的选择性配合。文献[23]提出了“引入电压及变速因子”的改进方法,但在原理上不完善,且正确性和适用性有待验证。文献[24]提出了结合接地距离元件和增加零序反时限过流加速系数的改进策略,以实现自适应分段加速切除故障,但此方法整定计算工作量大。此外,以上方法都需要零序反时限保护投入方向元件。但高阻接地时,由于保护安装处的零序电压较小,导致方向元件往往不能正确动作[25]。考虑到零序反时限电流保护用于切除高阻接地故障的定位,以上方法在实际应用中可能会存在一些问题。
线路发生故障时,流过故障线路两端保护的电流一般不相等,文献[21-26]针对零序电流大的一侧保护与相邻非故障线路保护的配合问题,提出了相应的解决方案。而文献[13]指出,零序电流小的一侧保护与相邻非故障线路保护同样存在配合问题,但到目前为止,还没有文献对此进行专门研究。
本文通过分析上述问题产生的原因,提出了基于零序电流有效值与相位突变量判据的零序反时限电流保护方法。所提方法原理简单,整定工作量小,且无需投入方向元件,不受高阻接地的影响,能有效防止相邻非故障线路零序反时限电流保护先于故障线路中零序电流小的一侧保护动作,提高了零序反时限电流保护的选择性。电磁暂态仿真软件(PSCAD)的仿真结果验证了所提方法的有效性。
1 零序反时限电流保护特性分析
1.1 特性方程
根据国际电工委员会标准和国家电网公司《线路保护及辅助装置标准化设计规范》,线路零序反时限电流保护采用正常反时限特性方程表示,写为
(1)
式中:t(3I0)为反时限曲线计算时间;I0为零序电流有效值;Ip为启动电流定值;tp为时间系数定值。
1.2 动作逻辑
线路零序反时限电流保护的动作逻辑如图1所示。图中,反时限曲线计算时间t(3I0)由电流定值Ip和时间定值tp共同决定,故线路零序反时限电流保护整定涉及4个定值:Ip、tp、th、tx。其中,th为零序反时限配合时间,tx为零序反时限最小时间。
由图1,零序反时限电流保护的动作时间可表示为
td=max{t(3I0),th}+tx
(2)
在零序反时限电流保护的整定中,主要通过th与tx时间的整定,躲开自动重合闸的延时以及接地距离保护和三相不一致保护的动作时间,其中th宜小于t(3I0),以使保护始终保持反时限特性;而相邻线路零序反时限电流保护间的动作级差要求,可通过Ip与tp时间的整定满足。
1.3 零序反时限电流保护相继动作情况分析
线路发生故障时,流过故障线路两端保护的电流一般不相等。本文中,定义故障线路中流过零序电流较大的保护为先动保护,流过零序电流较小的保护为后动保护,与先动保护相邻的非故障线路上的保护为近侧保护,与后动保护相邻的非故障线路上的保护为远侧保护。此外,若故障线路为平行双回线中的一回,则平行双回线中非故障线路上的保护定义为平行保护。
设先动保护动作时间为tdx,表示为
(3)
则定义满足式(3)的零序电流I0为临界电流Ix。
图1中的t(3I0)元件,是通过电流与时间的积分来实现的,当累积量达到动作门槛时,则满足t(3I0)元件的要求,随后进入tx元件的固定延时,此时动作时间与电流值无关,只要3I0>Ip,保护将正常动作。
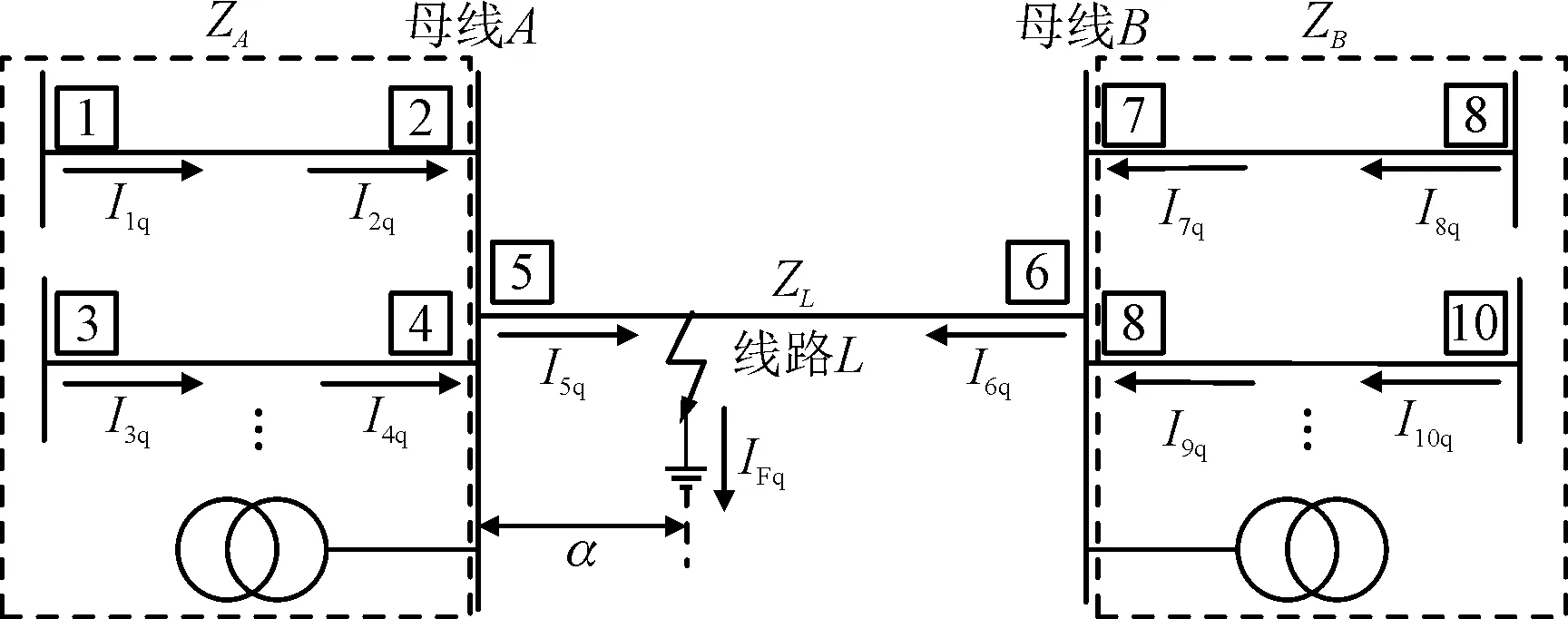
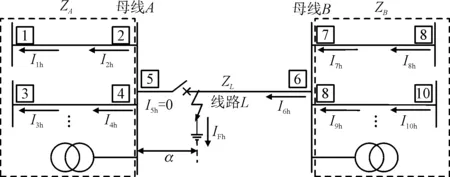
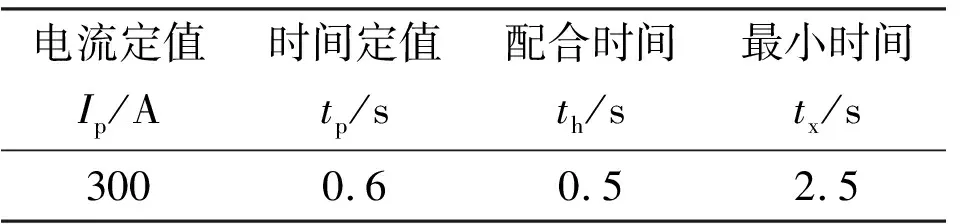
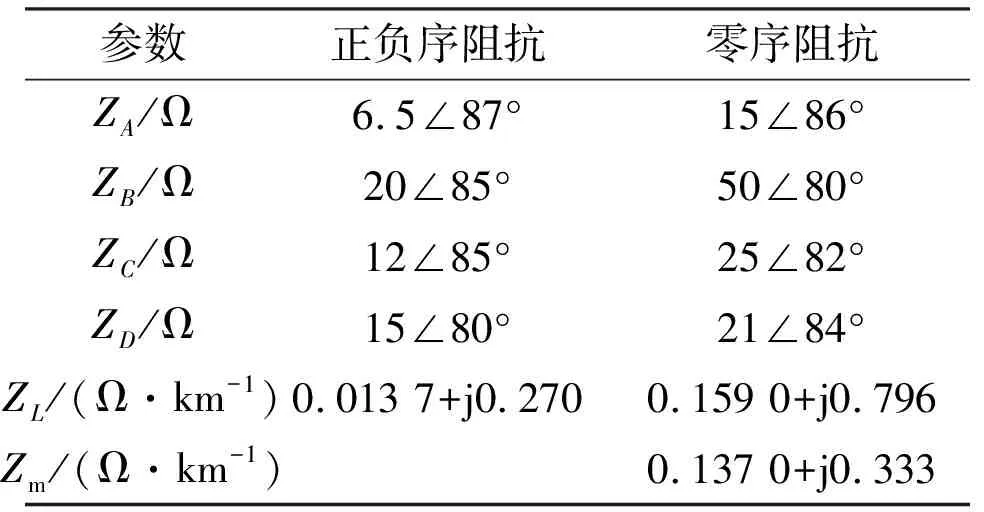
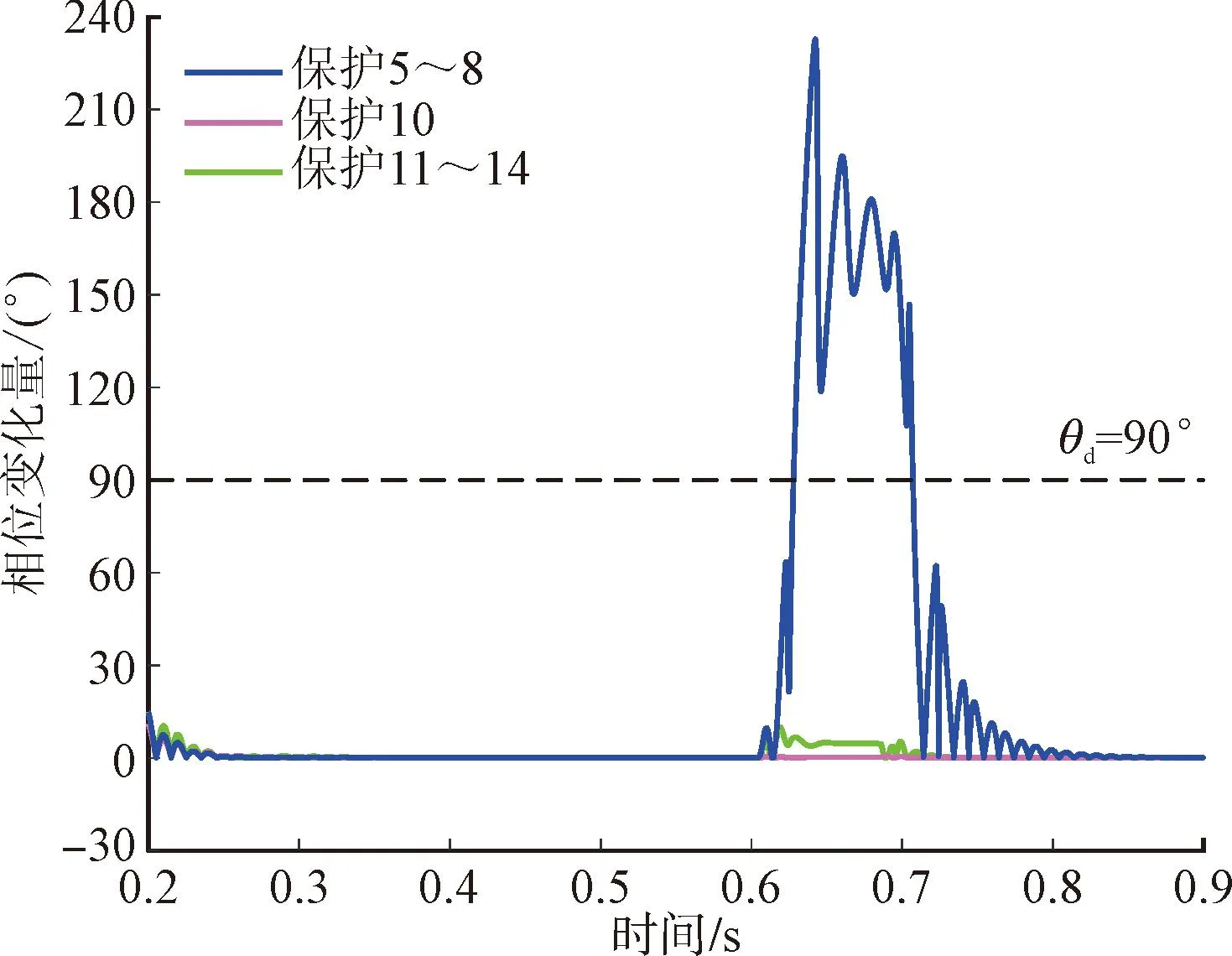
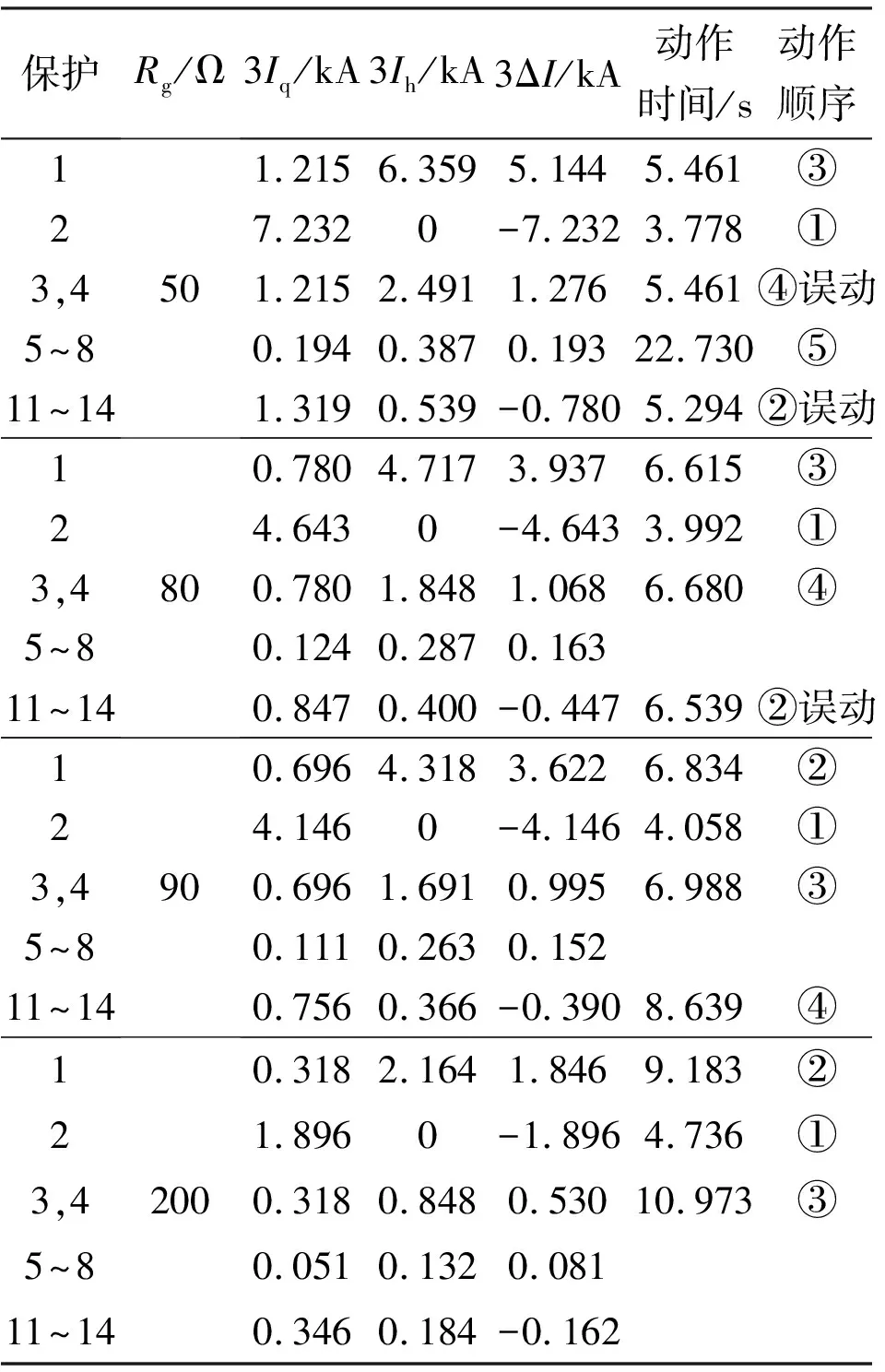
先动保护动作后,流过其余保护的电流将会发生变化。设在先动保护动作前,流过某保护的零序电流为Iq,先动保护动作后,流过该保护的零序电流为Ih。若Iq>Ix,则在tdx时间内,该保护已进入tx环节,先动保护动作后,该保护的动作时间与Ih无关;若Iq (4) 式中:t′为先动保护动作后,该保护处于反时限曲线计算环节的时间;td为该保护总的动作时间。 含单回线的输电网典型结构如图2所示,其中数字1~10代表保护编号,线路L零序阻抗为ZL,母线A左侧系统等值零序阻抗为ZA,母线B右侧系统等值零序阻抗为ZB。设线路L发生故障,故障位置距母线A的距离与线路L全长之比为α,保护动作前的电流下标为q,保护动作后的电流下标为h。先动保护动作前后,各支路上零序电流的方向如图2(a)和2(b)所示。其中,IFq为先动保护动作前故障点的零序电流,IFh为先动保护动作后故障点的零序电流。 (a)先动保护动作前 (b)先动保护动作后 根据回路电流法,可得到I5q与I6q的关系,如下所示 (5) 由式(5)可见,随着α增大,分子减小分母增大,即I5q与I6q的比值随α增大而单调递减。式(5)中,若令I5q=I6q,可定义临界位置α0,如下所示 (6) 当α<α0时,I5q>I6q,保护5将先于保护6动作,此时保护5为先动保护,保护6为后动保护,保护1~4为近侧保护,保护7~10为远侧保护。由于各母线上都接有多条支路,故流过保护1~4的电流Iq小于流过保护5的电流Iq,因此不会先于保护5动作。同理,保护7~10不会先于保护6动作,但保护1~4上的电流Iq有可能会大于保护6的电流Iq。 在以下分析中,假设I1q~I4q>I6q。若I1q~I4q>Ix,则在tdx时间内,保护1~4先于保护6进入tx时间环节,保护5动作后,由于高压输电网为环网结构,I1h~I4h一般不会减小为0,此时各支路的零序电流方向如图2(b)所示。若流过保护1~4的电流3Ih大于Ip,则保护将继续动作,且动作时间与3Ih无关,保护1~4将先于保护6动作。若I1q~I4q 保护5动作前,I5q和I6q从IFq分得零序电流且I5q>I6q,I1q~I4q从I5q分得电流;保护5动作后,I6h分得IFh的全部电流,其有效值将增大,而I1h~I4h只能通过电网中的环流分得电流,其有效值将减小。即单回线故障时,先动保护动作前后,流过近侧保护的零序电流减小,流过后动保护的零序电流增大。 对比图2(a)和2(b)可以发现,保护5动作前后,流过保护1~4的电流方向改变,流过保护6的电流方向不变。这表明单回线故障时,先动保护动作前后,流过近侧保护的零序电流方向改变,流过后动保护的零序电流方向不变。 含双回线的输电网典型结构如图3所示,其中,数字1~12代表保护编号,线路L1、L2为同杆双回线,零序阻抗分别为ZL1和ZL2,零序互阻抗为Zm,母线A左侧系统等值零序阻抗为ZA,母线B右侧系统等值零序阻抗为ZB。设线路L2发生故障,故障位置距母线A的距离与线路L2全长之比为α,保护动作前的电流下标为q,保护动作后的电流下标为h。保护动作前,各支路上零序电流的方向如图3(a)所示。 根据回路电流法,可得到I5q、I7q、I8q之间的关系,如下所示 (7) (8) 式中:Z′L1=ZL1-Zm;Z′L2=ZL2-Zm。 式(7)中,随着α增大,分子减小分母增大,即I7q与I8q的比值随α增大而单调递减。此时,若令I7q=I8q,可定义临界故障位置α1,如下所示 α1= (9) 式(8)中,若令I5q=0,可定义临界故障位置α2,如下所示 (10) 当α<α1时,I7q>I8q,保护7将先于保护8动作。I1q~I4q从I7q分得电流,I9q~I12q从I8q分得电流,假设保护1~4不会先于保护7动作,保护9~12不会先于保护8动作,这与实际系统中绝大多数情况相符。由于I7q>I8q,则I1q~I4q可能大于I8q。保护7动作后,若流过其余保护的电流3Ih大于Ip,则保护将继续动作。与单回线故障类似,无论I1q~I4q与Ix的大小关系如何,只要I1q~I4q>I8q,都存在保护1~4先于保护8动作的可能性。同理,当I7q 保护7动作前,I7q和I8q从IFq分得零序电流且I7q>I8q,I1q~I4q从I7q分得电流;保护7动作后,I8h分得IFh的全部电流,其有效值将增大,I1h~I4h从I5h分得电流,由于I5h 保护7动作后,各线路流过的零序电流方向如图3(b)所示。对比图3(a)和3(b)可以发现,保护7动作前后,流过保护1~4、保护8的零序电流方向不变。这表明双回线故障时,先动保护动作前后,流过近侧保护的零序电流方向不变,流过后动保护的零序电流方向也不变。 对于双回线中的非故障线路,保护7动作前,流过其的零序电流方向不定,需分情况讨论。 当0<α<α2时,双回线中的非故障线路中实际电流方向与I6q相同,随着α增大,式(8)的分子减小而分母增大,比值单调递减,当α=0时,有 (11) 若ZL2>ZL1,则在α=0附近区间,将有I5q>I8q,保护5、6可能先于保护8动作,保护7动作后,流过保护5、6的零序电流可能增大或减小,方向变为与I5h相同,即0<α<α1时,先动保护动作前后,流过平行保护的零序电流可能增大或减小,方向改变。当α=α2时,保护7动作前,I5q=0,保护7动作后,流过保护5、6的零序电流必然增大;当α>α2时,保护7动作前后,双回线中的非故障线路中实际电流方向均与I5q(I5h)相同,即流过平行保护的零序电流方向不变。但根据基尔霍夫电流定律,双回线中的非故障线路和母线B上其它支路均从I8q分得电流,故I5q、I6q将远小于I8q,保护不会误动。同理,当I7q 本节分析了近侧保护和平行保护的电流大于后动保护的电流而导致误动的情况。此外,若流过近侧保护和平行保护的零序电流小于流过后动保护的零序电流,且二者相差不大,此时将再不满足动作级差的要求。考虑到保护分闸时间和时间继电器的正负误差等因素[17],不满足动作级差要求的情况也可能造成近侧保护和平行保护误动。 综上所述,可得到以下结论。 (1) 单回线或双回线发生故障时,近侧保护的零序电流可能大于后动保护的零序电流,或二者相差不大,保护将误动。 (2) 双回线发生故障时,平行保护的零序电流可能大于后动保护的零序电流,或二者相差不大,保护将误动。 通过对先动保护动作前后各线路中零序电流有效值和方向的变化进行分析,可以发现: (1)单回线发生故障,先动保护动作后,流过近侧保护的零序电流将减小,方向改变;流过后动保护的零序电流将增大,方向不变。 (2) 双回线发生故障,先动保护动作后,流过近侧保护的零序电流将减小,方向不变;流过后动保护的零序电流将增大,方向不变。 (3) 双回线发生故障,先动保护动作后,流过平行保护的零序电流可能增大或减小,方向可能改变,也可能不变。若方向不变,平行保护不会先于后动保护动作,即只有在方向改变的情况下平行保护才可能误动。 基于先动保护动作前后,其余线路中零序电流的有效值与方向发生变化的特点,可在零序反时限电流保护动作逻辑中增加检测零序电流有效值与相位突变量的判据,如下所示 (12) (13) 电流相位突变量判据原理上依靠电流方向的突变,无需采集零序电压。对于电流方向发生突变的线路,相位突变量在180°附近;对于电流方向未发生突变的线路,相位突变量在0°附近,不受高阻接地的影响。 增加零序电流有效值与相位突变量判据后的零序反时限电流保护动作逻辑如图4所示。 图4 基于电流有效值与相位突变量判据的保护动作逻辑 Fig.4 Action logic based on current effective value and phase mutation criterion 由图4可见,当电流3I0大于Ip时,零序电流有效值突变量与相位突变量检测元件将会启动。实际应用中,需先确定零序反时限电流保护的定值及上下级线路最小的动作时间级差Δtm。令Δt<Δtm,即可保证该判据在相邻线路误动前启动,Δt越小,该判据生效所需时间越短。此外,由于受衰减直流分量的影响[26-27],前几个周波内得到的相角值不准确。设前几个周波时间为Δte,延时元件Δt1的作用为防止误判,只有在Δt1时间内始终满足判据才会输出高电平信号。在Δte时间内,可能存在原本不满足判据的保护,由于受衰减直流分量的影响从而满足了判据,也可能存在原本满足判据的保护变得不满足判据。故设置Δte<Δt1<Δt-Δte,可避免由于衰减直流分量引起的该判据误动或拒动。 故障发生后,先动保护将按照正常的反时限逻辑动作。先动保护动作后,对于单回线相邻的近侧保护,将满足式(12)和(13);对于双回线相邻的近侧保护,将满足式(12);对于双回线中的平行保护,若电流方向发生突变,则满足式(13)。不论单回线还是双回线故障,后动保护将不受判据影响而正常动作。 对于满足式(12)或(13)的保护,无论其处于哪个环节,都将在重新计时命令的作用下回到t(3I0)环节重新计时。由于先动保护动作后,流过后动保护的电流最大,故其它保护重新计时后将不会再误动。 根据文献[8]和[16]中的整定原则,为躲开重合闸延时及接地距离保护、三相不一致保护的动作时间,应有th+tx≥3 s,即零序反时限电流保护间的动作级差应大于0.3 s。根据此原则,本文中零序反时限电流保护的定值参数如表1所示。 表1 零序反时限电流保护的定值设置 采用PSCAD软件建立如图5所示的750 kV环网模型,阻抗参数如表2所示。设置故障位置为α=0,0.5,1.0,在0.1 s发生故障,0.6 s先动保护切除,1.2 s后动保护切除。对于有效值突变量和相位突变量判据,设置Δt=0.08 s,Δt1=0.04 s,Id=300 A,θd=90°。 图5 PSCAD仿真模型示意图Fig.5 Schematic diagram of PSCAD simulation model 表2 仿真模型中的阻抗参数 单回线发生金属性故障时,流过各保护的零序电流与动作时间如表3所示,其中,3Iq为先动保护动作前的3倍零序电流,3Ih为先动保护动作后的3倍零序电流,3ΔI=3Ih-3Iq,①、②、③分别为第1、2、3个动作。 表3 单回线不同故障位置下流过保护的零序电流与动作时间 由表3可见,当α=0时,流过保护9的电流3Iq最大,其动作时间为3.295 s,对应的电流3Ix为1.056 kA。此时,保护9为先动保护,保护10为后动保护,保护5~8为近侧保护,流过保护5~8、10的电流3Iq均大于3Ix,且流过保护5~8的电流3Iq大于保护10的电流3Iq,因此存在误动的可能性。但由于保护9动作后,保护5~8的电流3Ih小于300 A,故不会误动。当α=0.5时,流过保护9、10的电流3Iq相差不大,且均大于流过其它保护的电流,动作级差满足要求。当α=1.0时,故障发生后,流过保护10的电流3Iq最大,其动作时间为3.316 s,对应的电流3Ix为1.048 kA。此时,保护10为先动保护,保护9为后动保护,保护11~14为近侧保护,流过保护11~14的电流3Iq小于保护9的电流3Iq,且保护9动作后,流过保护11~14的电流3Ih小于300 A,故不会发生误动。 从有效值变化情况上看,在以上3个故障位置,先动保护动作后,后动保护的电流有效值均增大,近侧保护的电流有效值均减小且减小量大于Id。这表明先动保护动作后,后动保护不能满足有效值突变量判据,而近侧保护则能满足。 当α=0时,保护5~8、10以及11~14零序电流的相位变化量如图6所示。 图6 各保护零序电流的相位变化量Fig.6 Phase change of zero sequence current for each protection 由图6可见,在0.6 s时,保护9动作,保护10、保护11~14零序电流的相位突变量基本无变化,保护5~8零序电流的相位突变量大于90°且持续时间大于0.04 s。由于α=0.5、1.0时的波形与α=0时相类似,所以不再单独列出。因此可知,先动保护动作后,后动保护不满足相位突变量判据,而近侧保护可满足相位突变量判据。 另外还发现,当单回线故障时,先动保护动作后,由于近侧保护只能通过环网获得电流,流过的零序电流较小,达不到启动电流Ip值,于是近侧保护将会在瞬间返回,故而单回线故障时,近侧保护误动的可能性很小。 在表3中,由于在金属性接地时近侧保护不会误动,则经过渡电阻接地时更不会误动。即使某种情况下,先动保护动作后近侧保护的零序电流大于启动定值,也能依靠有效值突变量判据和相位突变量判据将近侧保护重新计时,防止其先于后动保护动作。 双回线发生金属性故障时,流过各保护的零序电流与动作时间如表4所示。 表4 双回线不同故障位置下流过保护的零序电流与动作时间 由表4可见,当α=0时,故障发生后,流过保护1的电流3Iq最大,其动作时间为3.234 s,对应的电流3Ix为1.082 kA。此时,保护1为先动保护,保护2为后动保护,保护3、4为平行保护,保护5~8为近侧保护,流过所有保护的电流3Iq均大于3Ix,其中流过保护3、4的电流3Iq与保护2的电流3Iq基本相同,流过保护5~8的电流3Iq大于保护2的电流3Iq。保护1动作后,流过其余保护的电流3Ih均大于300 A,因此将继续动作,此时保护3~8将误动。当α=0.5时,流过保护1、2的电流3Iq相差不大,且均大于流过其它保护的电流,动作级差满足要求。当α=1.0时,故障发生后,流过保护2的电流3Iq最大,其动作时间为3.348 s,对应的电流3Ix为1.036 kA。此时,保护2为先动保护,保护1为后动保护,保护3、4为平行保护,保护11~14为近侧保护,流过保护1、3、4、11~14的电流3Iq大于3Ix,流过保护3、4、11~14的电流3Iq均大于保护1的电流3Iq。保护2动作后,流过保护1、3、4、11~14的电流3Ih均大于启动电流,因此将继续动作,此时保护3、4、11~14将误动。 当α=1.0时,不同过渡电阻Rg下流过各保护的零序电流与动作时间如表5所示。 表5 不同过渡电阻下流过保护的零序电流与动作时间 由表5可见,当Rg=50 Ω时,保护2的动作时间为3.778 s,对应的电流3Ix为0.901 kA,流过保护1、3、4、11~14的电流3Iq均大于3Ix。保护2动作后,流过保护1、3、4、11~14的电流3Ih均大于300 A,于是将继续动作,此时保护3、4、11~14将误动。当Rg=80 Ω时,保护2动作时间为3.992 s,对应的电流3Ix为0.850 kA,流过保护1、3、4、11~14 的电流3Iq均小于3Ix。保护2动作后,流过保护1、3、4、11~14的电流3Ih均大于启动电流,于是将继续动作,此时根据式(4)计算出它们的动作时间,可发现保护3、4不会先于保护1动作,但由于动作级差不满足要求,保护11~14仍先于保护2动作,此时保护3、4、11~14将误动。当Rg=90 Ω时,保护2的动作时间为4.058 s,对应的电流3Ix为0.836 kA,流过保护1、3、4、11~14的电流3Iq均小于3Ix。保护2动作后,流过保护1、3、4、11~14的电流3Ih均大于启动电流,于是将继续动作,此时根据式(4)计算出它们的动作时间,可发现保护3、4、11~14不会先于保护2动作,且动作级差满足要求,不会误动。当Rg=200 Ω时,保护2的动作时间为4.736 s,对应的电流3Ix为0.722 kA,流过保护1、3、4、11~14的电流3Iq均小于3Ix。保护2动作后,流过保护1、3、4的电流3Ih均大于启动电流,于是将继续动作,此时根据式(4)计算出它们的动作时间,可发现保护3、4不会先于保护2动作,且动作级差满足要求,不会误动;而此时,保护11~14的电流3Ih小于启动电流,已不会再动作。 以上仿真结果表明,在线路两侧出口处发生故障时,流过先动保护的电流远大于后动保护的电流,近侧保护的电流大于后动保护的电流的可能性也较大,此时较易发生误动;而当故障位置向线路中间移动时,近侧保护的电流大于后动保护的电流的可能性减小,不易发生误动。当故障点存在一定的过渡电阻时,仍会存在近侧保护及双回线中非故障线路的保护与后动保护动作时间不满足级差要求的情况。随着过渡电阻的增大,临界电流Ix减小,同时流过近侧保护和平行保护的电流3Iq将逐渐由大于Ix变为小于Ix。当过渡电阻增大到某一临界值时,近侧保护和平行保护将不会再误动。 从有效值变化情况来看,在3个不同的故障位置,先动保护动作后,后动保护的电流有效值均增大,近侧保护的电流有效值均减小,因此,通过引入有效值突变量判据可以防止近侧保护误动。当Rg=90 Ω时,流过保护11~14的电流3ΔI最小,为-390 A,故将Id设置为300 A,能够保证有效值突变量判据正确动作,且具有足够的灵敏度。当Rg≥90 Ω时,已不会再发生误动,因此不需要该判据启动。实际应用中,可以通过降低电流Id的值,提升该判据对过渡电阻的耐受能力,以保证零序反时限电流保护在任何过渡电阻下都不会发生误动。当α=0、0.5、1.0时,经过渡电阻接地先动保护动作后,平行保护的电流有效值增大;而当α=1.0金属接地时,平行保护的电流有效值减小,因此,有效值突变量判据无法防止平行保护发生误动。 当α=1.0时,不同过渡电阻Rg下各保护零序电流的相位变化量如图7所示。 (b)Rg=80 Ω (c)Rg=200 Ω 由图7可见,在不同过渡电阻下,当保护2动作后,保护1、5~8、11~14零序电流的相位变化量均远小于90°,而保护3、4零序电流的相位变化量均大于90°且持续时间大于0.04 s。因此可知,双回线故障时,先动保护动作前后,后动保护和近侧保护不满足相位突变量判据,而平行保护满足相位突变量判据,此时引入零序电流相位突变量判据可防止平行保护误动。 两相接地与单相接地,仅在零序电流的大小上有所区别,在出现零序电流这一本质现象上基本没有区别。下面,以α=0时双回线两相金属性接地故障为例,说明所提方法在两相接地时的适用性。表6给出了双回线两相金属性接地故障时,流过保护的零序电流与动作时间。两相接地时各保护零序电流的相位变化量如图8所示。 表6 双回线两相接地故障时流过保护的零序电流与动作时间 图8 两相接地时各保护零序电流的相位变化量 Fig.8 Phase change of zero sequence current for each protection during two-phase grounding 由表6可见,保护3~8将误动,其中保护5~8的有效值突变量为-4.524 kA,通过有效值突变量判据可以防止保护5~8发生误动。由图8可见,保护3、4的零序电流相位变化量大于90°,通过相位突变量判据可以防止保护3、4发生误动。由此可知,有效值突变量和相位突变量判据同样适用于两相接地的故障类型。 本文分析了单回线和双回线发生接地故障时,零序电流的分布特征以及故障线路中零序电流较大的一侧保护动作前后,其余各线路中零序电流有效值和方向的变化情况,提出了引入零序电流有效值突变量和相位突变量判据的零序反时限电流保护方案。通过理论分析和仿真验证,得到以下结论。 (1) 高压电网发生接地故障,非故障线路的反时限零序电流保护可能先于故障线路中流过故障电流小的一侧保护动作。 (2)故障线路中零序电流较大的一侧保护动作后,流过相邻非故障线路的零序电流有效值将减小,或方向突变;而对于故障线路中零序电流较小的一侧保护,流过其的零序电流有效值将增大,且方向不变。 (3) 通过在零序反时限电流保护中引入零序电流有效值突变量和相位突变量判据,可以有效防止非故障线路的零序反时限电流保护误动,且在经过渡接地时,该判据仍然适用。2 零序电流分布特征与保护动作情况分析
2.1 单回线故障时的零序电流分布特征
2.2 双回线故障时的零序电流分布特征
3 基于零序电流有效值与相位突变量判据的零序反时限电流保护


4 仿真分析

4.1 单回线单相接地故障

4.2 双回线单相接地故障



4.3 双回线两相接地故障


5 结 论
猜你喜欢
计算机应用(2022年2期)2022-03-01计算机应用(2021年4期)2021-04-20计算机应用(2021年1期)2021-01-21中国医疗器械信息(2020年10期)2020-01-19智族GQ(2019年7期)2019-08-26设备管理与维修(2016年7期)2016-04-23通信电源技术(2016年5期)2016-03-22电测与仪表(2015年9期)2015-04-09小天使·一年级语数英综合(2015年2期)2015-01-14河南科技(2014年18期)2014-02-27