
基于智能算法优化的嵌入式机器人运动控制方法
2024-02-16 12:03高兆申
科学与信息化 2024年2期
高兆申
泰山科技学院 山东 泰安 271000
引言
差分驱动的机器人具有结构简单、运动能量消耗少的特点,在很多场合获得了广泛的应用。例如,在抗震救灾中,可以利用这种机器人投送救援物资[1];在野外探测中,可以利用这种机器人搭载多功能相机获得所需要的图像[2]。但是,在机器人的运动控制中,由于欠驱动性质的存在,导致控制律设计困难。本文利用嵌入式系统的自主控制和即时通讯优势,设计了一种基于智能算法优化的运动控制律,从而使机器人按照预定的轨迹运动。这种控制方法增加了机器人执行多种任务的能力,有利于推动这种机器人获得更广泛的应用。
1 机器人运动模型
机器人采用“双轮差分驱动+单轮自由支撑”的结构实现平面内的运动。两个后采用同一连杆连接,利用差分驱动的方式为机器人的运动提供动力。其中,前进的动力由两个车轮的一致运动提供,转向的动力由两个车轮的差速运动提供。前轮发挥对车体的支撑作用,并不提供动力[3]。机器人的机械结构如图1所示。
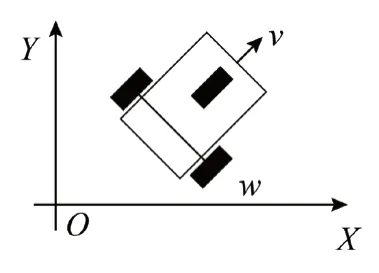
图1 差分运动机器人机械结构
在图1所示的坐标系XOY中,机器人以前向速度v、角速度w运动。其中,v来自于两个后轮的协同运动,w来自于两个后轮的差分运动。定义机器人的运动轨迹为(x,y,θ),其中(x,y)表示其在平面内的坐标位置,θ表示转向角。运动轨迹与运动速度之间的关系,可以表示为[4]:
在公式(1)中,机器人的运动模型显然是一个欠驱动系统。也就是说,通过对速度变量v和w施加控制力,很难完全控制住x,y和θ三个状态变量。这个运动控制律的设计带来了难度。很多文献指出,对欠驱动系统实施运动控制,可以选择其中的部分状态变量作为被控制量、选择剩余的状态变量为被跟随量,通过与控制变量之间联立等价的对应关系,从而完成控制律的综合设计。
2 机器人物理实现
在图1所示的机械结构基础上,增加智能载荷构建完整的机器人系统。机器人的两个后轮由电机分系统提供驱动控制信号。电机分系统由转子、定子、霍尔元件以及信号磁环等组成。其中,转子在定子内部通过电磁感应运动,从而产生稳定的直流电。霍尔元件和信号磁环完成直流电的换相,实现输出功率的稳定调节。同时,利用信号磁环可以将电流的相位信号与机器人的位置信号实现关联。在电机分系统的基础上,设置位置监测传感器,通过实时观测机器人的运动状态调整电机分系统的输出功率,从而完成机器人的运动控制。此外,设计PLC控制器,用于对机器人的运动信号进行控制[5]。
完整的机器人系统,拓扑结构如图2所示。
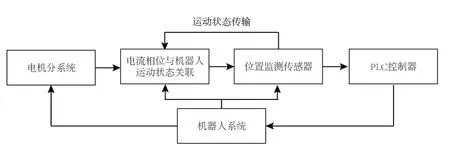
图2 机器人系统拓扑结构
在图2所示的机器人系统拓扑结构中,PLC控制器采用嵌入式方案设计。在PLC内部,设计ARM模块,将运动控制律烧录其中;利用机械传动装置将ARM模块的输出信号转换为控制机器人后轮的力矩信号,驱动机器人进行差分运动。同时,分别利用位置和速度传感器对机器人的实时运动状态进行采集,将运动状态信息与参考轨迹信息进行实时对比。此外,PLC控制器中集成了通讯模块,用于与外界实时传输信号,便于对机器人的运动状态进行监测。PLC控制器的内部结构如图3所示。
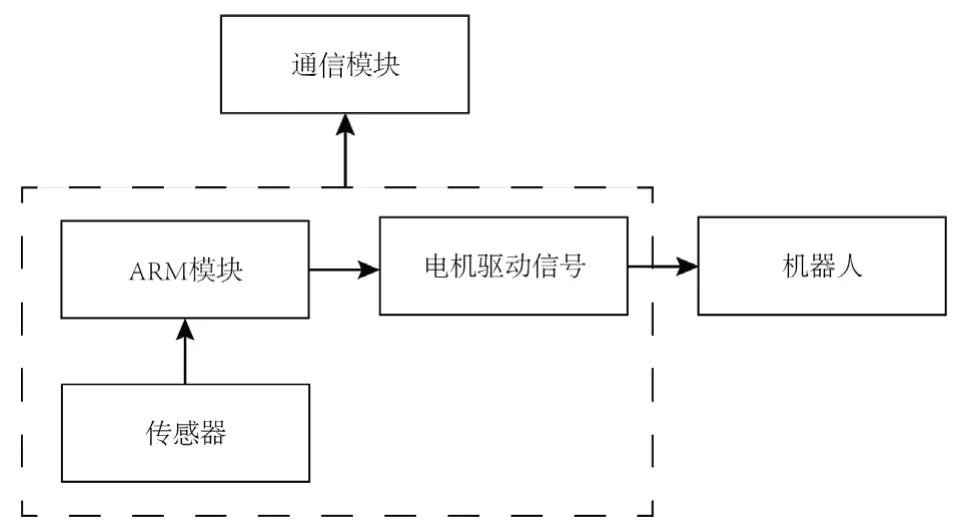
图3 PLC控制器内部结构
3 机器人运动控制律设计
机器人的运动控制律被烧录在PLC控制器内部,通过产生驱动信号控制速度变量v和w,进而驱动运动轨迹(x,y,θ)按照预期变化。在实际场景中,假设机器人预期的运动轨迹,也被称为参考轨迹,如下所示:
式中,vr和wr分别表示参考前向速度和角速度,(xr,yr,θr)表示参考轨迹,也就是期望的机器人的运动状态。
将公式(1)减去公式(2),并将计算结果转变成PLC控制器可以测量的量,结果如下:
式中,(xe,ye,θe)表示运动轨迹的跟踪误差。
为了消除轨迹跟踪误差,也就是使公式(3)中的(xe,ye,θe)同时收敛到0状态,可以设计如下所示的控制律:
式中,k1,k2,k3是大于0的整数,代表待调整的控制器增益。利用公式(4)中的控制律,可以实现机器人按照预定轨迹运动的控制。
4 运动控制效果优化
对控制律(4)采用粒子群算法进行优化。粒子群算法是一种性能稳定的智能算法,具有较快的收敛速度。在机器人的运动控制中,基于粒子群算法可以对控制律(4)中的待调整增益k1,k2,k3进行优化计算。
具体计算思路如下:假设k1,k2,k3在整个实数域内的可能的取值被每一个粒子的位置所代表。这些粒子按照一定的速度运动,在运动过程中位置随时变化,表示k1,k2,k3的取值随之变化。选择轨迹跟踪误差(xe,ye,θe)的平方和作为参考指标,当参考指标的取值最小时,粒子所在的位置即是k1,k2,k3的最优解。经过反复迭代运算,最终发现,在k1=k2=k3=3时,跟踪误差(xe,ye,θe)的平方和取得最小,约等于0。因此,可以断定,k1,k2,k3的最优解为3。
5 机器人运动控制效果仿真验证
为了验证公式(4)中的运动控制律的控制效果,选择如下所示的圆形参考轨迹进行仿真验证。其中,圆形轨迹的半径为1米,机器人的初始位置为(0.5,-0.25),参考轨迹的初始位置为(0,1),初始方向角均为π/4。机器人运动控制的仿真结果如图4所示。

图4 机器人运动控制效果仿真
在图4中,黑色点表示机器人实际轨迹的初始位置,红色点表示机器人参考轨迹的初始位置。黄线和绿线分别表示参考轨迹和实际轨迹。横轴表示X坐标,单位是m,纵轴表示Y坐标,单位是m。由图4可以直观地看出,在很短的时间内,机器人的实际运动轨迹就可以收敛到参考轨迹,说明运动控制律(4)发挥了积极的作用。
为了进一步研究运动控制律的效果,分别计算出在运动过程中各个误差量的变化情况,结果如图5所示。

图5 机器人运动控制误差仿真
图5清晰地表示了在机器人运动过程中误差的变化情况。由图5可以进一步看出,在较短的时间内,运动误差Xe和Ye均稳定地收敛到0,说明运动控制律(4)具有较好的实用效果。
6 结束语
嵌入式机器人的结构相对简单,利用PLC控制器集成自主开发的控制律后,可以控制机器人按照预期的轨迹进行运动。这种控制方式可以提高机器人的应用范围。本文设计了一种控制律,并利用智能算法进行了仿真验证。结果表明,在本文设计的控制律作用下,嵌入式机器人能够按照预定的轨迹运动,进而证明了控制律的有效性。
猜你喜欢
新世纪智能(数学备考)(2021年5期)2021-07-28
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
现代装饰(2018年5期)2018-05-26
铁道通信信号(2018年2期)2018-04-18
中国三峡(2017年2期)2017-06-09
电镀与环保(2016年3期)2017-01-20
信息安全研究(2015年3期)2015-02-28
太空探索(2014年1期)2014-07-10
单片机与嵌入式系统应用(2014年9期)2014-03-11
