海底管道隐患检测:研究进展与未来展望
2024-02-12 00:00:00戴清清
上海国土资源 2024年4期
关键字:海底管道;无人潜水器;声波探测;光纤传感;技术升级;人工智能
中图分类号:P751 文献标志码:A 文章编号:2095-1329(2024)04-0197-06
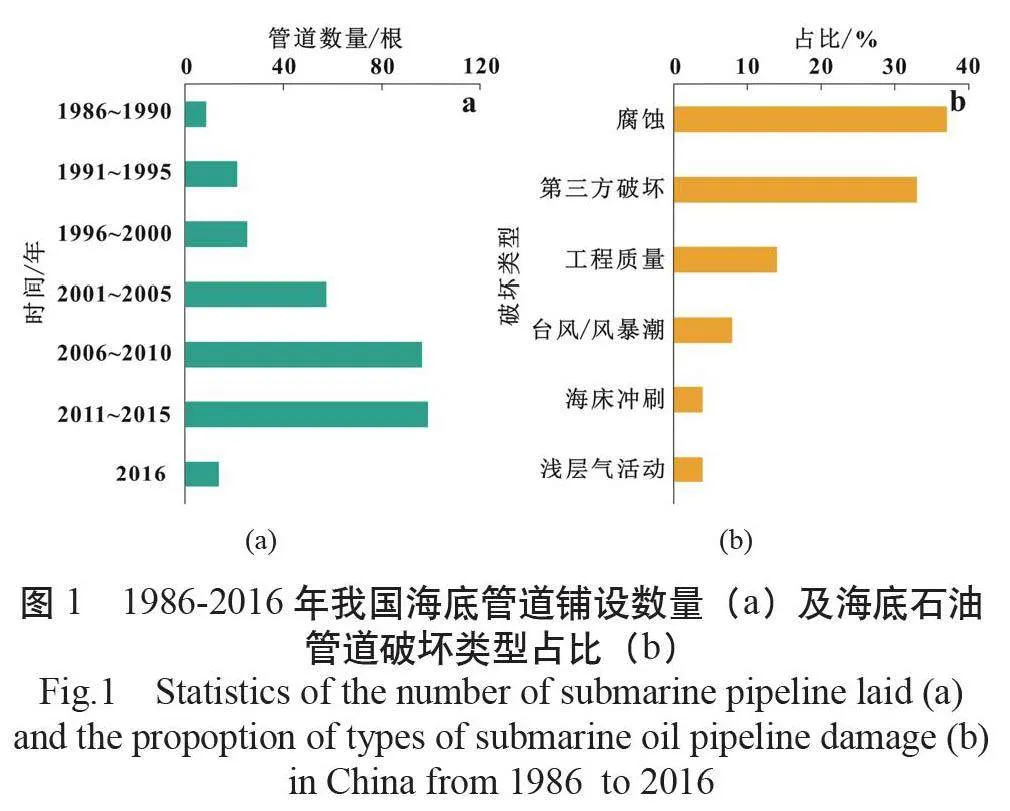
随着海上油气勘探技术的提升和开发力度的增大,我国已陆续在近海建设了几十个海上油气平台以及大量的海底管道,且呈逐年递增的趋势[1](图1a),海底管道作为连接陆海的“能源血管”,其稳定性对能源利用安全至关重要。海底管道基本埋藏于浅地质层内,但由于海洋环境复杂多变,海底管道通常不仅会受到腐蚀、风暴潮、海床冲刷以及浅层气活动等自然因素的扰动,也可能受到第三方破坏与工程质量问题的影响(图1b),从而引起海底管道赋存状态发生改变,如管道破损、出露或者悬空状态,管道长期悬跨会导致自身不均匀受力,并导致局部发生破坏,造成巨大的经济损失,油气泄漏亦对海洋环境产生严重的污染。2016年墨西哥湾发生海底管道破坏,造成约3.3×105L 的石油泄漏,油污蔓延至北美洲附近海域,对周围海洋生态环境造成了巨大的破坏[2],据统计,1986—2016年间我国共发生51起海底管道破坏事故[1]。所以亟需开展海底管道隐患的检测技术研究,确保海底管道的安全运行[3-4]。
海底管道基本埋藏于浅地质层内,在工程质量或外界环境影响下,常出现一些潜在隐患,所以需要对海底管道进行健康检测[5]。目前海底管道隐患的主要检测技术包括直接检测、声波探测和光纤监测三类。直接检测包括人工潜水探摸和无人潜水器探测;声波探测主要是利用声波反射信号进行海底管道检测,如多波束测深、浅地层剖面、侧扫声呐测量和合成孔径声呐等技术方法[6]。分布式光纤传感系统则可对海底管道进行常态化监测预警[7],目前美国、英国、日本对无人潜水器检测进行了较多的研究和实践[8-10],而我国目前还主要以地球物理探测为主,崔征科等研究了导航定位、多波束测深系统和浅地层剖面仪在海底管道检测中协同应用方法,并结合实测实例探讨了协同应用的适宜性和有效性[11];蔡春麟利用参量阵浅地层剖面技术对海底管道隐患进行检测,重点对沙包回填悬空管道后的赋存状态进行就检测和分析,为海底管道的隐患检测和综合防治提供了科学依据[12]。
本文介绍了海底管道的3类、8种检测方法,并讨论了不同检测方法的优势和弊端,根据各类监测方法的优劣,提出了近期应用的相关建议,最后针对我国检测技术的薄弱项如无人潜水器技术和三维合成孔径声呐法提出了技术升级建议,并对人工智能赋能海底管道隐患检测进行了展望,为未来新型技术在管道检测应用做铺垫。
1直接检测
1.1人工潜水探摸
人工潜水探摸:潜水探摸需要潜水员携带测量仪和记录工具对出露或者悬跨的管道进行检测,现场测量和记录海底管道悬跨的长度和高度数据。人工直接检测的优势是可精确开展测量,弊端是只能在小范围检测,对人身安全也有一定的隐患,且只能在浅海区作业。
1.2无人潜水器技术
无人潜水器技术基本可分为两大类,即遥控式水下机器人(Remote Operated Vehicle,缩写ROV)和自主式水下机器人技术(Autonomous Underwater Vehicle,缩写AUV),在海底管道隐患调查中具有不同的应用特点。
ROV是一种多功能遥控控制水下机器人,主要以控制系统、推进系统和各类数据采集工具组成,针对海底管道检测,可配备相应的传感器,如温度、声学或者光学传感器[13-14]。其优势是可保障人员安全,且在沿管道移动过程中全程录像和采集数据,保障了数据的连续性;弊端是受海底环境干扰明显,定位误差较大。
AUV最大的特征就是可开展自主检测。AUV与ROV最大的区别是独立性,可以独立操作,人工干预度小。AUV可同时完成管道形态、走向和破坏形态的测量和记录。AUV海底管道检测分为在线交互模式和离线自动化模式:在线模式是指AUV能够自动化检测海底管道并同步传回管道的位置坐标,并完成自动化数据处理和预警响应;而离线模式则是预先设定好AUV的检测路线,自动开展检测并记录数据。离线检测同样可保障人员安全,且保障了管道检测的连续性和长距离等特点;但是弊端也很明显,离线检测存在一定的误差,其次AUV监测成本极高,尚未全面普及[15-17]。
2声波探测
目前海底油气管道铺设方式均是将管道赋存于海床表面或浅地层,海床表层或浅地层经过波浪、潮流的长期冲刷,海底地形发生侵蚀或淤积现象,进而导致管道赋存状态发生改变,可能出现掩埋、悬空、平移等现象,与管道铺设的原始状态有明显的差异。声波探测是以声学图像的直接表现形式,是应用最广泛的地球物理探测方法之一,声波法探测仪器主要包括多波束测深系统、浅地层剖面仪、侧扫声呐以及合成孔径声呐等,可用于海底地形、地貌、浅地层结构和构造的探测。
2.1多波束测深系统探测
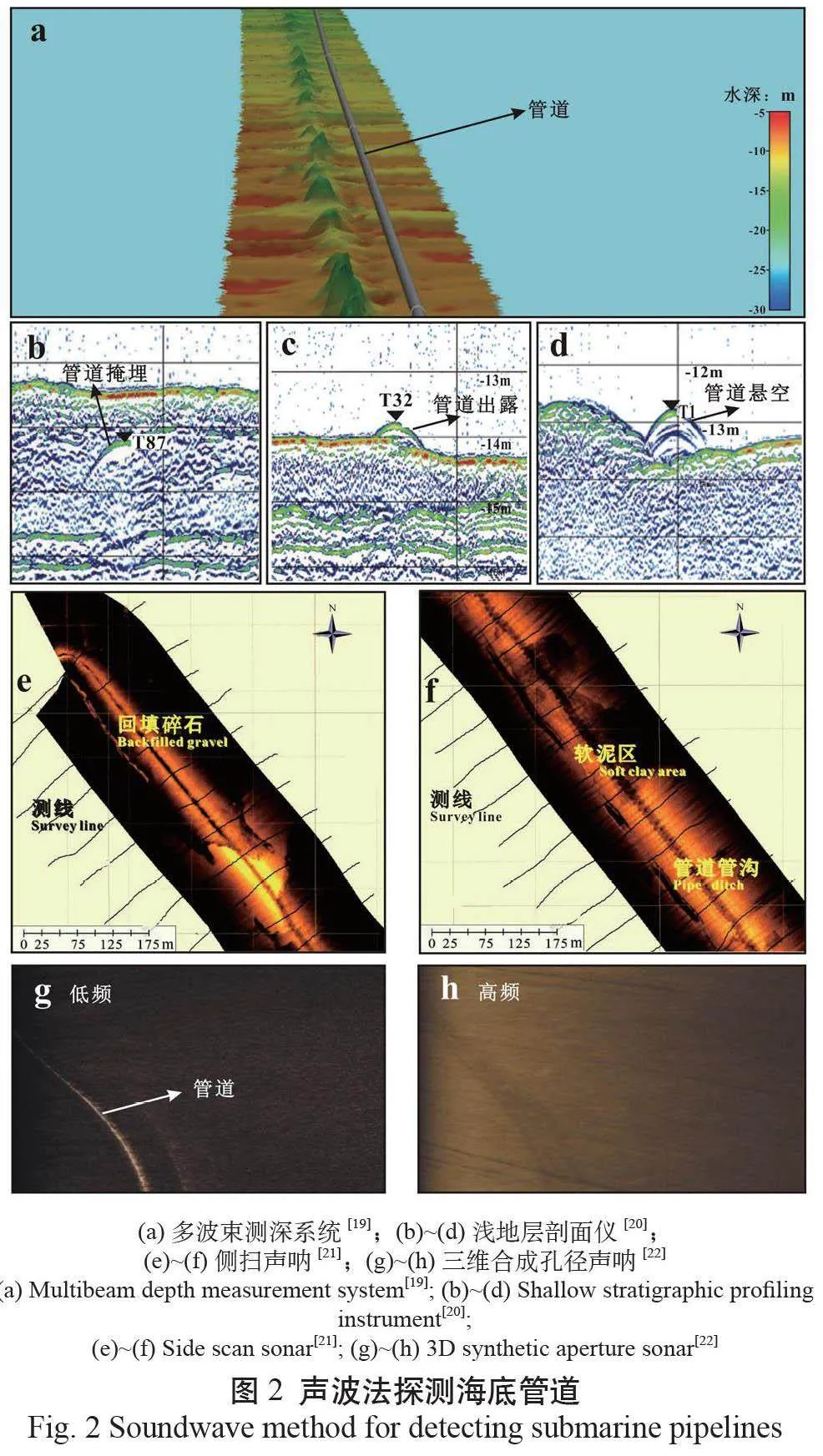
多波束测深系统是走航时发射和接收一系列垂直航向分布的声波束,形成一条连续的与船只航向垂直的测深波束点。多波束测深法通过测量海底地形直接观测海底管道赋存状态(图2a)[18]。其优势是检测范围广,测量效果好,一般用来识别出露或悬空的大口径管道;其弊端是对调查船要求高,受环境干扰因素多,且无法探测海底面以下的管道。
2.2浅地层剖面探测
浅地层剖面是利用声脉冲信号在不同沉积物地层中存在不同的声速,通过计算声波所穿透地层传播的时间得到地层的分布状态。由于海底油气管道与海底沉积层具有较大的密度差和声速差,可用来识别掩埋、出露、悬空三种状态油气管道(图2)。当管道反射曲线位于海底面以下,管道下方地层反射信号较弱,呈现与管径相同的空白窄条带,其埋深为剖面顶部至海床面之间距离。当管道反射曲线位于海底面以上,剖面揭示的是管道出露状态,其反射特征和掩埋状态类似,但管道出露高度小于管径(图2c)。当管道反射曲线悬浮于海床以上,剖面揭示的是管道悬空状态,表现为管道出露高度大于管径(图2d)[16-19]。浅地层剖面探测优势体现在可针对浅层地层结构和管道埋深进行探测,但其弊端也比较明显,只能垂直管道探测,效率低下。
2.3侧扫声呐探测
侧扫声呐法是发射声波脉冲至海底面,根据返回接收的时间和传送距离的不同,形成不同的灰度影像图,展现海床表面的精细化地貌特征(图2e~f)。侧扫声呐声波反射强度不仅与发射的声波波长、频率、角度等有关外,还与海床表层的底质物粒度和海床起伏变化等因素有关。例如:黏土组成的平滑型海床,声波回收信号弱,则影像色调表现为偏弱,而基岩、砾石或砂质组成的起伏性海床,回波信号较强,影像色调表现则偏深[20]。侧扫声纳与多波束系统优势和弊端较为类似,仅可识别出露或悬空状态的管道,无法获取水深和埋藏管道的数据信息。
2.4合成孔径声呐法探测
合成孔径声呐法是侧扫声呐的升级版本,其原理是利用移动的小孔径基阵来获得合成孔径,可得到极高方位方向的空间分辨力。合成孔径声呐含二维合成孔径声呐和三维合成孔径声呐。二维合成孔径声呐相较于侧扫声呐具有更高的分辨率,但仍无法穿透地层获取地质信息;而三维合成孔径声呐则基于多波束测深和浅地层剖面原理设计,是两者的技术融合,可实现悬跨、出露和掩埋管道的三维影像。当三维合成孔径声呐使用穿透力高的低频声波时,可探测到海底管线的位置和并实现三维成图(图2g),而高频声波则难以获取地层内部信息(图2h)。相较于传统声学探测仪器,三维合成孔径声呐具有精度高、范围广、效率高等优势,并可探测地下非金属管道。因此,三维合成孔径声呐在海底管道隐患检测方面极具优势。但三维合成孔径声呐也存在一定的弊端,如作业成本高、系统复杂和环境稳定性要求高等。
3光纤监测
光纤传感监测技术主要采集海底管道的应变、振动以及周围环境温度等变化,并利用光波和光纤作为信号传播的载体和介质传输至终端设备,研究人员可在终端设备上获取数据,并分析海底管道的健康状态[23]。光纤传感(Fiber Optic Sensor,FOS)监测技术是海底管道最有效的监测技术之一[24],国内外大量学者针对光纤传感监测开展了研究。澳大利亚Peng等[25] 学者通过数值模拟提出了基于振动信号分析的海底管道的悬空监测方法;韩国Kwon 等[26] 利用布里渊光时域反射仪(BOTDR)获取海底管道的温度和应变信息,实现了海底管道的长距离实时监测。国内学者也对光纤传感监测提出了一些管道异常的算法,金伟良和邵剑文基于自回归模型提出了海底管道应变分析方法,并在渤海海底管道进行了应用[27-28];Zhao等[29-31] 学者基于主动加热测温法构建了海底埋管悬空监测与评定系统,该方法可通过分析海底电缆的温度变化情况进行数据分析,并计算海底管道的悬空坐标、长度和高度。光纤传感监测的优势在于全线常态化监测[32],而弊端在于成本高,且存在一定的误差。
4未来展望
4.1近期应用建议
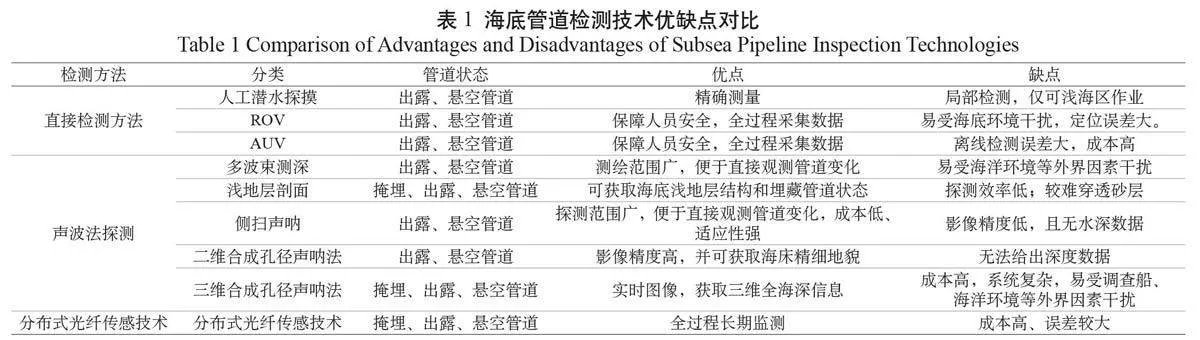
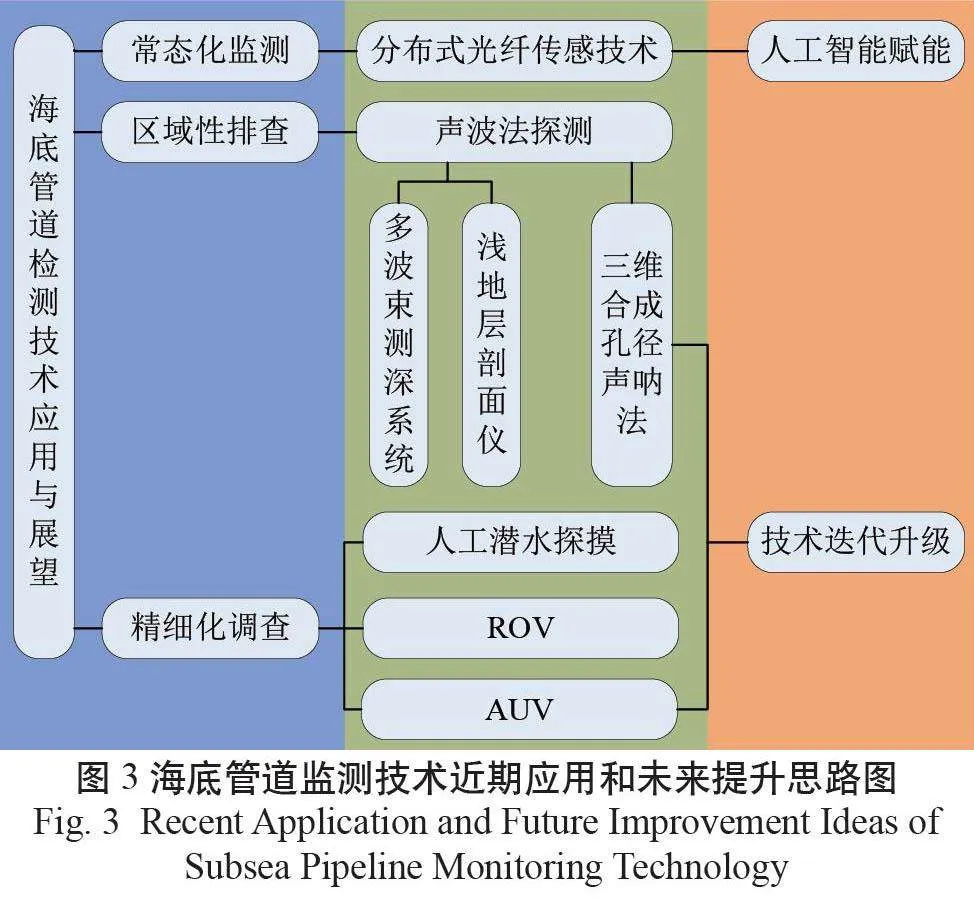
根据三类海底管道检测探测方法对比可知,三类方法各有优势和弊端(表1)。本文基于各类技术方法的适用条件,对比选择近期海底管道检测较为适用的技术方法。建议海底管道检测分三步开展:首先,可利用分布式光纤传感技术对海底油气管道常态化全线监测,实时监控其压力应变、温度等数据变化,并分析可能出现异常的管道段;其次,利用声波法对可能出现异常的海底管道段进行区域性隐患排查,可采用两类方式:(1)利用多波束测深系统和浅地层剖面仪相结合的方式,对海床和浅层地质层进行调查,识别存在风险的管道区;(2)利用三维合成孔径声呐法直接开展区域性调查,形成海床和浅层地质层的三维影像,并分析管道风险。两类方法可根据海况和经济进行选择,在海况差的区域选择多波束测深系统和浅地层剖面相结合的方法,在海况较好的区域,尽量选择三维合成孔径声呐进行调查,可获取更加精细的数据。最后,针对管道隐患段开展人工潜水探摸或无人潜水器设备探测,根据海况和水深选择不同方法。浅水区、海况好的区域可采用人工潜水探摸,而深海区,海洋环境复杂的区域,首选ROV 遥控探测,若海洋环境极为复杂,则建议采用AUV 离线探测(图4)。
4.2技术迭代升级
4.2.1AUV技术升级
根据上述综述可知,AUV技术在直接探测方法中最具安全性和智能性,可针对海底管道开展离线自动化监测、数据处理和预警响应,是未来海底管道监测设备应用的趋势。然而,AUV在技术应用上尚存在较多不足,如误差大,成本高等,亟需开展技术升级,降低成本并提高其精确性。我国的AUV技术与国际最新技术尚有一定的差距,未来建议我国AUV海底管道探测技术向四个方向试验和技术升级:(1)加强在深海区或者复杂海洋环境的试验,利用极细光纤,制定更为精细的试验网格,在海底管道周围开展高精度网格化海底作业;(2)结合最新的智能图像识别技术,设计更加智能化、自主化AUV探测系统,开展更加智能化海底管道探测;(3)由于海洋环境极为复杂,建议未来搭载更为丰富的物理、化学、生物传感器和自动化操作机械设备,以获取多要素综合海洋监测数据,并执行复杂探测和修复任务;(4)结合GPS、水声通讯、Mesh组网等多维通讯方法,开展无人化装备协同作业。
4.2.2三维合成孔径声呐法技术升级
声波法探测中,仅三维合成孔径声呐法可形成地表到浅地层的三维影像,精确识别地形地质情况,但是也有操作成本高,系统复杂,易受调查船、海洋环境等外界因素干扰等弊端,所以建议开展三方面技术升级。(1)基于GPS、超短基线、惯导等空海地多源数据开展运动误差计算和补偿技术。由于海洋环境复杂,三维合成孔径声呐法的定位和成像精度都存在较大的误差,亟需基于多源通讯数据开展数据误差和补偿技术升级;(2)海底管道目标特征自动化设备技术:基于智能化图像识别技术,对海底管道的赋存状态进行学习、分类和识别,形成自动化预警;(3)提升电子系统和大数据成像算法,开展多通道大数据并行计算。随着海洋探测深度和和数据精度的增长,对数据收集设备和计算处理都提出了较高的要求,亟需升级相关软硬件设备(图4)。
4.3人工智能赋能
人工智能技术(Artificial Intelligence,缩写为AI)依托大数据集成和算法优化,可开展自主深度学习、图像识别以及智能分析等,是我国新质生产力的主要发力点之一。未来海底管线探测可将人工智能应用于分布式光纤传感技术中。通过在光纤传感系统中加入多类传感器件构建海底管道监测的多模态模型,基于多类型海底管道隐患深度学习训练,提高模型监测的准确率,从而实现自动化监测和预警海底管道运营隐患问题(图3)。
5结论和认识
本文总结了国内外关于海底管道的三类检测技术,对比了直接检测、声波探测、光纤监测三类方法在海底管道检测中优劣势,并针对近期应用和未来技术升级提出建议和展望,主要结论和认识如下:
(1)人工潜水探摸适用于局部小范围检测;无人潜水技术(ROV、AUV)安全性高,但误差大;多波束测深、浅地层剖面、侧扫声呐、二维合成孔径声呐优势在于测量范围广,劣势在于效率低、易受海洋环境影响;三维合成孔径声呐和光纤监测的监测精度和范围都有较明显的优势,但成本较高。
(2)建议未来海底管道隐患检测分三个阶段开展:首先,采用分布式光纤传感系统对海底管道进行常态化全线监测预警;其次,当海底管道局部发生应变或者环境变化时,可采用多波束测深系统与浅地层剖面相结合或者三维合成孔径声呐进行区域性隐患调查;最后,采用ROV 遥控探测或AUV 离线探测开展更为精细化的调查。
(3)建议未来通过技术升级和新技术应用实现精细化监测、自动化探测和智慧预警:通过提升AUV 和三维合成孔径声呐的算法和硬件设备,同时结合多维通讯数据实现精细化监测,通过加强人工智能在海底管道探测中的应用,提升海底管道光纤传感系统的自动探测和智能预警能力。
(责任编辑:赵宝成)
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
潍坊学院学报(2021年2期)2021-07-22 07:59:24
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
电脑知识与技术(2019年13期)2019-07-08 02:23:41
中国宝玉石(2018年3期)2018-07-09 03:13:58
小猕猴智力画刊(2017年6期)2017-07-03 09:19:12
西南石油大学学报(自然科学版)(2016年2期)2016-12-01 06:01:47
发明与创新(2016年26期)2016-08-22 03:23:26
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:23