基于混合智能算法优化的微电网下垂控制策略
2024-01-31 13:23郭庆左晓阳李金发刘人杰黄成龙
电子制作 2024年2期
郭庆,左晓阳,李金发,刘人杰,黄成龙
(吉林化工学院,吉林吉林,132022)
0 引言
近年来,随着能源消耗和环境治理的双重压力不断上升,国家对能源的需求也在不断演变。为解决能源结构老化的问题,寻求多元化的能源供应势在必行。微电网以其多样的控制方式及持续提升的能源管理方案,可以在独立运作与联网模式中保持稳定地运转。此外,这种方式能够减少随机型分布式电源对电网产生的干扰,有效地提高可再生能源的使用效果。鉴于光伏、风力发电机组、蓄电池设备以及氢能等各类分布式电源的大量涌现,许多国内外的研究者对于分布式发电技术的关注度也在日益增长[1~4]。近年来,随着光伏、风电、储能系统和氢能等分布式电源的发展速度加快,微电网技术的研究进步也十分迅速。这些分布式电源的广泛应用推动了微电网的发展,为实现更加可持续和高效的能源系统提供了新的可能性。为了更好地实现微电网的稳定运行和高效管理,学者们正在不断改进和优化微电网的控制策略,以适应不断变化的电力系统环境。在微电网中,下垂控制策略始终对分布式电源并联起到一定的保护作用。通过利用下垂控制,能够更有效地调整微电网内各个分布式电源的运行状态,从而提升系统的全面性和稳定性。下垂控制具有不依赖通信和“即插即用”的特点,使得微电网在各种条件下都能快速部署和运行。下垂控制可以实现有功均衡,有效协调微电网内部各个分布式电源的有功功率输出,提高系统的能源利用效率。这为微电网的稳定运行提供了可靠的技术支持。然而,在无功功率均分方面,下垂控制存在一些问题。换句话说,由于未能全面考虑逆变器输出电阻和线路电阻的作用,下垂控制在无功功率均分方面表现不佳。这导致母线电压随微电网运行状态而改变,这不仅对出口电力质量造成了负面影响,还使得电力分配失衡。
针对以上问题,文献[7]提出一种改进后的负荷功率分配控制策略,通过增加无功误差补偿,使微网内部的无功功率能够被合理分配,但该方法有它的局限性,其控制器的参数选取不便。在文章[8]中,给出了一种自适应下垂控制方法。这个方法包括使用PI 控制器来自动调整下垂参数,同时也采用另外一种自适应的PI 控制器作为次级回路来调整直流微网总线电压。然而,该控制方法在实际应用中较为依赖通信。参考文献[9]提出了一种直观的测量线路数值的方式,通过在本地控制环境中使用监测器来测量线路数值,突出了监测器对线路数值的精确测量。该方法基于观测值计算每个分布式发电机(DG)的压降大小,并旨在通过对每个DG 进行精确补偿,合理分配系统中的无功功率。然而,这一方法在实际应用中可能面临一定困难,因为它对微电网结构的要求相对较高。文献[10]采集了连接线路的阻抗角作为一个重要变量对下垂控制改进,有助于在系统的暂态过程中减小振荡。同时,为了进一步优化系统的动态响应,在控制中添加了一个微分控制环节,以更好地应对系统运行中的变化。但是该方法仅仅关注了功率的稳定性输出问题,未充分考虑系统的电压和频率问题。这一限制可能导致在电压和频率方面存在的不稳定性。文献[11]在逆变器控制中引入虚拟电阻,利用自适应控制使其阻值可以跟踪有功功率输出偏差值并及时调整,但是未考虑到该方法与微网中并联运行的微型燃气轮机兼容效果不好。文献[12]采用的是一种融合了分段调控和频率调制的自适应控制来改进其下的下垂控制;它采用了自动调整下垂曲线的手段去改善功率分配效果。然而并未考虑到该方法下下垂系数过大的话会对该系统产生怎样的影响。文献[13]是关于使用了一种自调节改进的下垂控制策略。该策略被应用到传统逆变器下垂控制中并且加入了一个具有比例及积分的模块以提高无功电压下垂控制的关系从而使得能更好地平衡出力情况。不过这个方案也存在一些缺点比如可能会降低整体运行过程当中的稳定性和可行度而且也没有提供任何有关选择控制参数的方法等等的问题都是存在的。文献[14]提到了他们所开发的一种叫做自适应模糊下垂控制 的先进型自动化管理方法,它的主要功能就是用一套有效的数学模型来自我调整的方式计算出来最适合当前状态的最优值然后以此为基础进一步确定最佳的工作条件以便系统保持稳定。文献[15][16]采用新的控制技术,频率设定值不变的情况下,可以对系统频率提供支撑,并按预定比例分配负荷,但未提出确切的表达式确定该方法的相角下垂系数如何计算。文献[17]在研究了包含储存设备的光伏并联网络后,利用实时的光伏与电力系统的功率数据来调整光伏出力的峰值和谷值,以平滑电力输出波动的幅度,但是该文并未使用高鲁棒性的控制方法来处理光伏的发电量,这可能使得控制效果受到外界环境变化的影响,如:当光伏板的外部条件发生剧烈变动时,可能会出现“错误判断”的现象,进而破坏光储微电网的平稳运作。文献[18][19]提出了基于一致性的二级控制策略,通过利用通信网络与系统节点进行信息交流,减少系统电压以及频率的偏差,并有效提高了无功功率分配精度。
本文提出了一种基于混合智能算法的改进下垂控制策略,在下垂控制的基础上加入积分和微分环节,同时将PSO 与GA 算法结合显著提高了算法的寻优能力,设计误差代价函数以功率输出偏差及电压偏差最小为目标,寻求最优控制参数,有效提高微电网工作状态变化时系统功率均衡分配以及电压恢复稳定的能力,缩短系统恢复稳定的时间,显著提高了系统的鲁棒性。
1 系统模型
■1.1 微网模型
现阶段,我国的微型电力网络主要包括分散的新能源发电设施(DG)与存储装置(DS)组成。本研究中,我们将使用两种小型新能源发电机组—DG1 和DG2 作为并联运行,为突出本次仿真中的逆变器控制部分。因此,我们选择用直流电源等效这两个微型电源,并且设定它们的功率相近。此外,我们的实验还包含了两个不同的用户负载:L1 和L2。
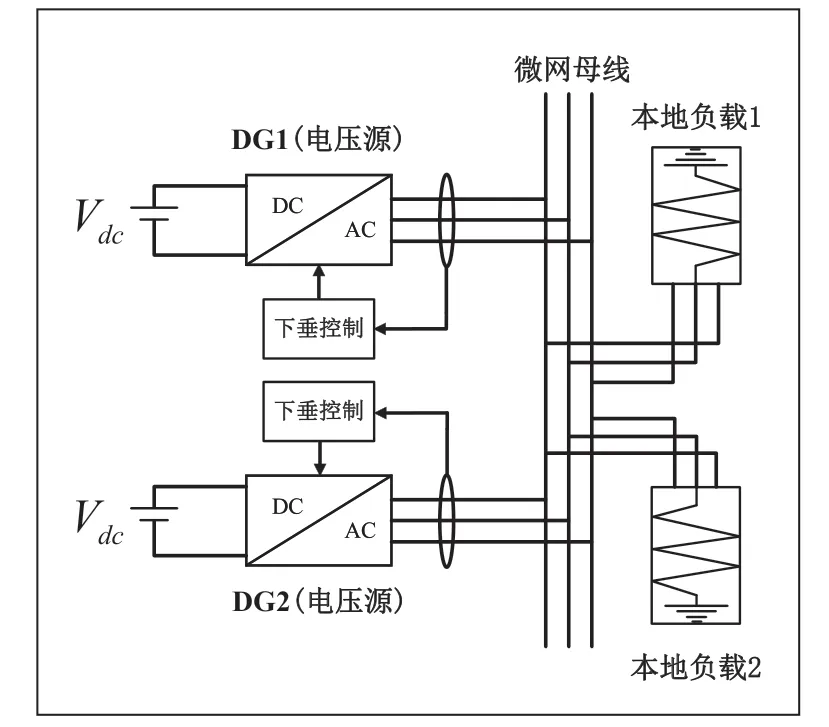
图1 微网结构示意图
■1.2 传统下垂控制的功率分配分析
下面将两台逆变器并联运行的功率传输特性进行分析。图2 为其等效电路。
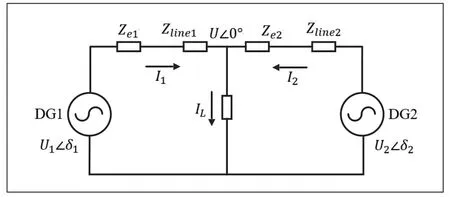
图2 微网等效电路图
Ui∠δi是微电源DG1 经逆变器后输出的电压,母线θ和微电源与电压的相角差是δi;微电源的公共母线电压为U∠0°。
逆变器输出的电流为:
上式中,θ_i为逆变器i等效输出阻抗的相角。
第i台微源到公共母线的等效输出阻抗为:
逆变器输出的复功率为:
上式中,为逆变器输出电流的共轭复值。
将式(1)取共轭复值代入式(3)中,计算可得到第i台(i=1,2)逆变器产生有功功率和无功功率为:
当系统传输线路为理想情况下的高压线路时,此时线路的传输阻抗是感性,电阻R可被忽略Zi≈jXi,θi≈90°。
负载阻抗相较于微源的输出阻抗非常大,因此母线电压相角与逆变器i 出口处电压的相角之差很小,即cosδi≈ 1,sinθi≈δi。则对(4)式简化后得如下公式:
根据式(5),(6),我们可知在高压系统中,逆变器的等效输出阻抗是感性,因此等效输出阻抗相角差δi,与微电源逆变器出口处输出的有功功率成正相关;在微电源逆变器的出口位置,输出的无功功率与微源输出电压的幅度以及母线电压的幅度之间的差值Ui-U是正相关的。
频率与相角之间的关系如下式:
综上所述,下垂控制表达式为:
传统下垂控制有它本身的局限性,体现在追求电压偏差更小和分流精度更高上。假定两种输出功率单元的输入输出电能是一样的,且虚拟阻抗也是一样的。然而,由于线缆的阻抗具有显著差异,实际上,这两种变换器运行的 I-U 曲线并不是为同一条电压电流曲线,如图3 所示。
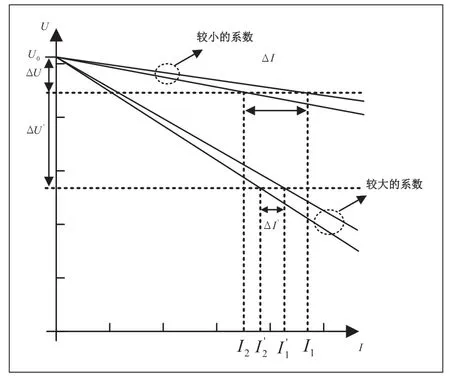
图3 下垂控制曲线
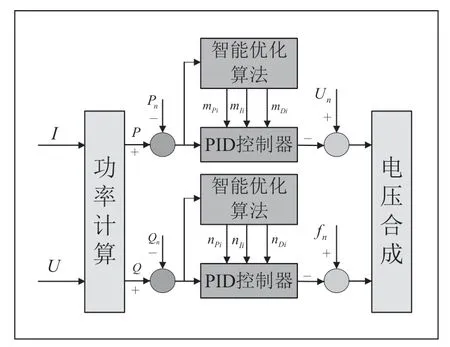
图4 下垂控制改进框图
观察图像后发现,如果选取较低的下垂曲线系数,虽然能减低电压误差,但是也会削弱分流准确度;相反地,若采用较高的下垂曲线系数,则能够提升分流精准度,然而却会导致更大的电压误差。因此我们可以得出结论:通过放弃对有差控制的精确度以换取负载电流均匀性的下垂控制方式是存在的。在传统的下垂控制模式里,设定好的下垂系数并未充分考虑到蓄电池的特质,这可能造成系统运行时过量或不足地充电和放电现象,进而损害了蓄电池的使用期限,并且无法实时调整蓄电池SOC 与下垂系数的对应关系,这也使得系统的稳定性变得困难。综上,传统下垂控制存在其不足之处,需要对它进行改进。
2 改进下垂控制
■2.1 改进下垂控制设计
为了应对系统负荷投切时,由于线路阻抗的差异导致的功率分配和电压波动问题,我们在 P-V/Q-f 下垂控制方程式的基础上增加了积分和微分环节,从而形成改进后的下垂控制方程,如下:
因为上式中m 和n 的调整没有相关理论作为参考。调整的过程,存在一定的随机性,且需要一定的时间。这些参数之间的关系是相互影响的,有的情况下,需要使系统的动态性能指标达标可能需要牺牲系统一定的超调量。因此,本文利用算法作为达到系统稳定目的的手段,对这些参数进行动态寻优调整。
在优化和改进过程中,我们需要关注系统的各个方面的性能,例如:控制效率、续航能力等。在其中核心的控制参数优化问题在于考虑由于微网全局的高维度以及非线性导致的系统的庞杂棘手。改进后下垂控制的优化目标是保证整个系统的稳定性以及电力质量达标。具体总结后,需要满足以下目标:微电网全局应当稳定且高效地依托额定功率参考值或随机负载的需求对DG 的输出功率进行优化控制。
改进后的优化算法通过不断迭代来寻找控制最优解,这就需要通过目标函数来反映系统的状态是否稳定以及电能质量是否达标。在这里引入微网状态误差积分代价函数,通过改进控制算法调整M 和N 参数,不停迭代寻找最优解,找到目标函数的最小值,即可使该系统达到稳态误差较小的稳定状态。
目标代价函数可设计为:
其中,W是权重矩阵;E(k)是绝对误差矩阵,定义为:
△P(k)和 △Q(k)是有功和无功参考功率及测量出的实际值之间的误差。△V(k)是以标幺值(1.0p.u)表示的电压偏差。因此代价函数越小,代表有功无功及电压偏差越小,即系统此时的工作状态越稳定,电能质量越高。
■2.2 混合智能算法优化
2.2.1 粒子群算法和遗传算法原理
粒子群算法中,假定在某个D 维度的目标搜索领域里,存在N 个微粒构成的集群,其中第i 个微粒代表了某个D维向量:
第i 个质点的运动速率就是一条d 维向量,我们将其标记为:
在第t代的第i个粒子向第t+1代进化时,根据以下式子更新:
式中,vij(t)粒子的速度,xij(t)粒子的位置,pij(t)粒子的最优解,pgj(t)群体的最优解,c1、c2学习因子。
基本的粒子群算法和遗传算法流程如图5 所示。
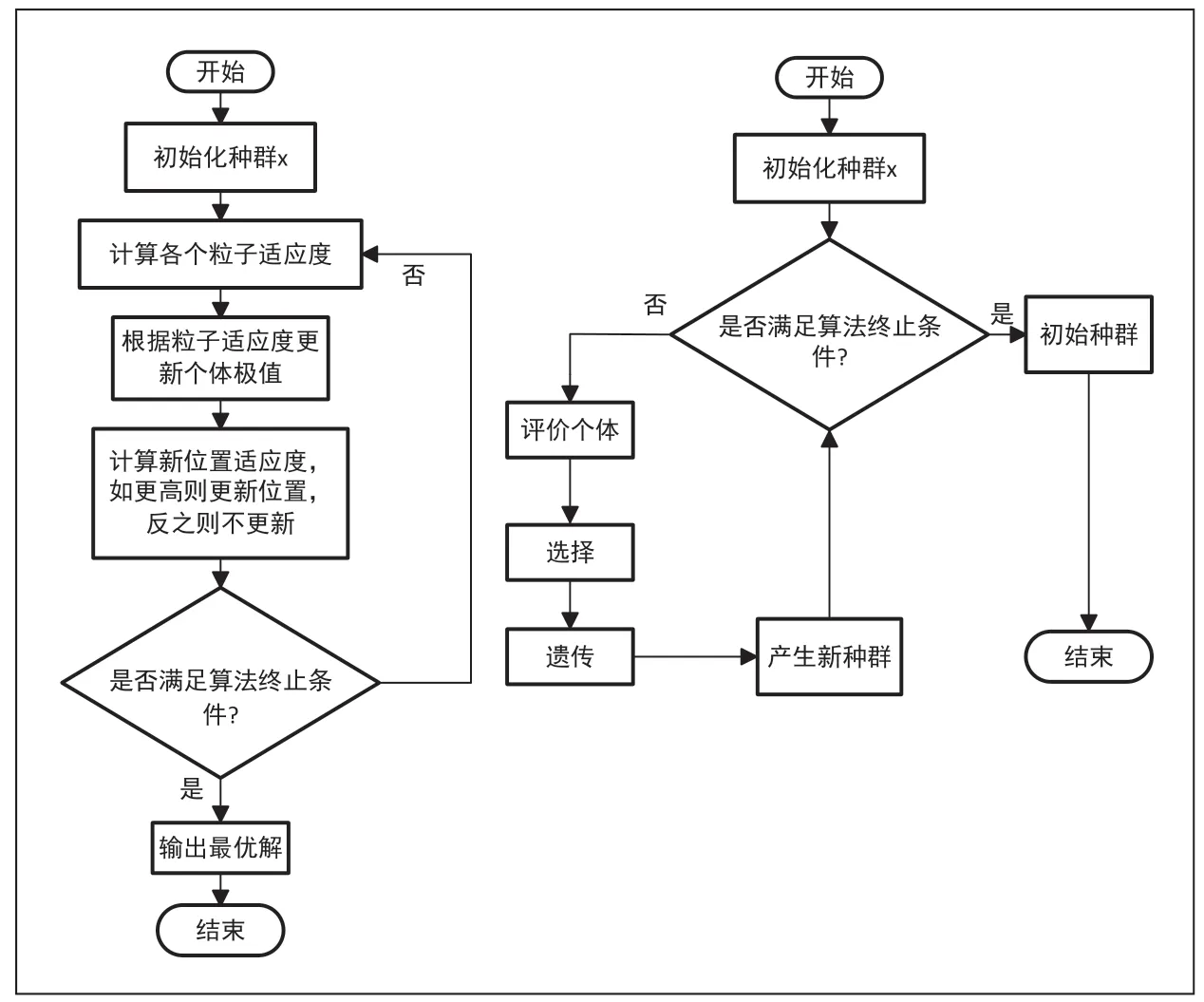
图5 PSO 与GA 算法原理流程图
2.2.2 混合智能优化算法设计
利用遗传算法模仿生物学中的DNA 复制过程以寻找最佳解决方案,该方法具备强大的全局优化特性,能高效地处理离散优化问题的集合,然而它的局部优化性能相对较差,这可能导致在实际应用过程中受到限制,难以获得最优结果。相比之下,传统的粒子群算法则依赖于跟踪单个实例的最大值来寻求最优解,这种方式对于处理非线性和连续型优化问题非常实用,效率高且收敛速度快,但在多次迭代之后可能会陷入局部最优状态。为克服这两者在处理多元化优化任务时的缺陷,本研究提出了一种新型的融合了粒子群算法与基因算法的混合粒子群算法,此法综合了两种算法的长处并扬长避短,因为在传统的粒子群算法中,粒子的移动方向是由个体最大值决定的,存在一定的局限性,但是在加入GA 后,我们采用粒子与其自身及整个族群的最小值交互以及随机粒子突变的方法来搜寻最优答案,从而扩大种群的可能范围,提升整体搜索的能力。
在混合算法粒子收敛的过程中,惯性权重至关重要,传统PSO 的惯性权重ω通常是固定不变的,但ω设置的大小,严重影响粒子的收敛速度,想要准确达到系统最优解很难。因此,本文对ω的设置如下,使ω与t 成反比:
式中:ωs是初始惯性权重系数,ωe是结束惯性权重系数,t表现在的迭代次数,M是总的迭代次数。
粒子的迭代次数越多,c 越大。在搜索前期为增强粒子的全局寻优能力,c1和c2相对小。后期为增强粒子的局部寻优能力,c1和c2相对较大,该思路有利于精确得到最优解。本文对学习因子c1、c2的设置如下:
式中:c1s、c1e是c1的起始值和结束值,c2s、c2e是c2的起始值和结束值。
在PSO 中引入GA 的交叉和变异,可以提高随机性,使粒子种群更多样。此外,这种算法还能增强其局部随机搜索的功能,从而能更快地找到最优解。当算法将要得到最优解时,此时应使变异的概率减小,避免损失最优解。本文对交叉和变异概率r、p的设置如下:
式中:ps是起始变异概率,pe是结束变异概率。

图6 混合算法原理流程图
整个改进算法优化控制参数的过程如下:
(1) 初始化粒子位置xi与速度vi,初始化个体和全局适应度值最佳。
(2) 开始迭代,根据公式(19),(20),(21)得到ω、c1和c2。由于交叉操作,计算得到交叉临界值r。每次迭代后,粒子必须更新自身位置和速度,并对越界的粒子修整,得到暂时的各个粒子的适应值f。
(3) 对得到的f进行排序,为后续的交叉和变异做准备。当交叉条件概率达标时进行交叉操作。交叉概率由固定概率变为动态设定,它会随着当前迭代次数不断改变,并修正越界变量。
(4) 交叉结束后更新各个粒子适应度值f,下一步变异操作做准备。
(5) 对粒子进行变异操作。根据式(23),得到p。同交叉概率一样,它不是固定不变的,是随机数。
(6) 更新个体和全局最优值。若fi<fibest,则fibest=fi,pi=xi;若fp<fibest,则fibest=fp,pg=xi。其中,pi为粒子i经历过的最好位置,pg所有粒子经历过的历史最好位置。
(7) 如未能达到结束条件,返回步骤(2)。
接下来我们将对比分析本研究提倡的混合优化算法、传统的PSO(粒子群)以及GA(遗传算法)对多目标测试问题ZDT3 的解决效果,其优化成果以图形形式展示在图7 上。可以看到,当使用GA 时,它在经过了500 轮迭代之后仍未找到合适的最优解;而PSO 则在约275 轮迭代后停滞并呈现出局部最优状态,并未实现全局最优的目标。由此可以看出混合算法对比PSO 能够跳出局部最优,对比GA 能成功收敛,寻优能力更强,效果更好。
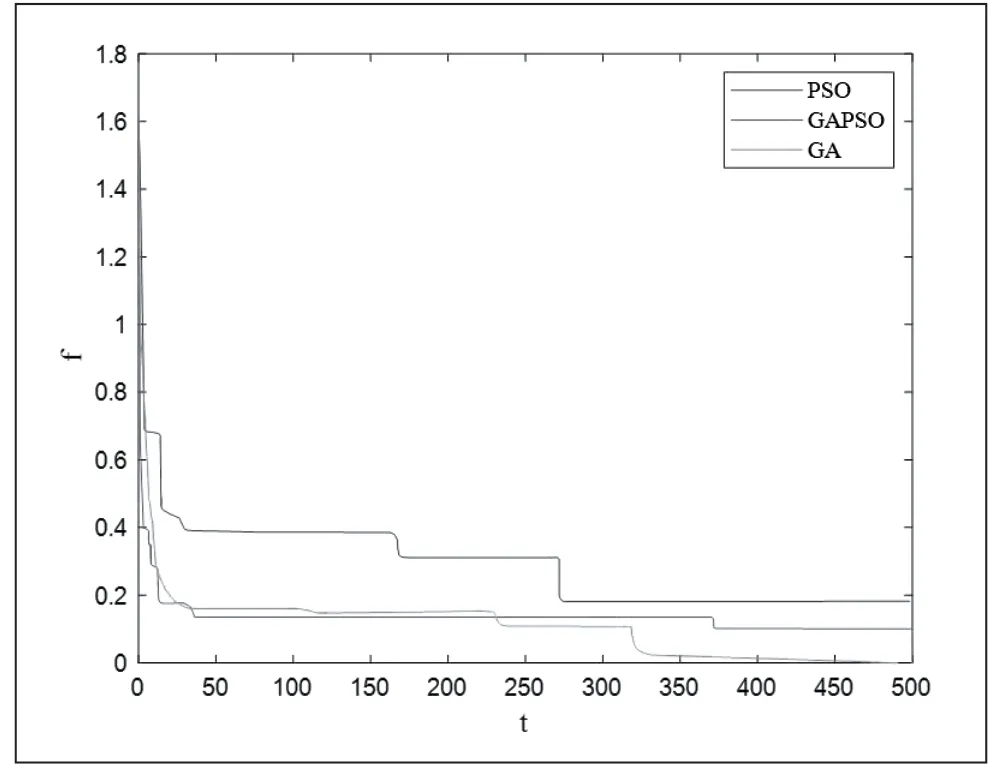
图7 三种算法适应度测试对比图
3 仿真验证与分析
本研究拟利用MATLAB/Simulink模拟构建实证模型。我们计划创建三种模型:一种是基于P-V/Q-f 下的下垂控制方法;另一种是根据本文创新方法改进后的下垂控制方法。我们将比较这两种方案在不同负载变动及开关状态下的电力分配效果和电压调整情况,第三种是由传统的PSO算法与本文提出的改进下垂控制结合,以实现后两者间的比照分析,以此来证明我们提出的新型混合算法的优越性和实用性。
■3.1 微网仿真模型
本研究以MATLAB/Simulink 为平台构建了一个微电网模拟系统,并对其中的独立运行状态下的微电网逆变器的性能特征通过仿真方式进行了研究。该模拟系统的核心组件包括三相电压源型的逆变器(DG1)与(DG2)及当地负荷构成的微电网,其主要结构分为两个部分:功率主回路和控制回路。
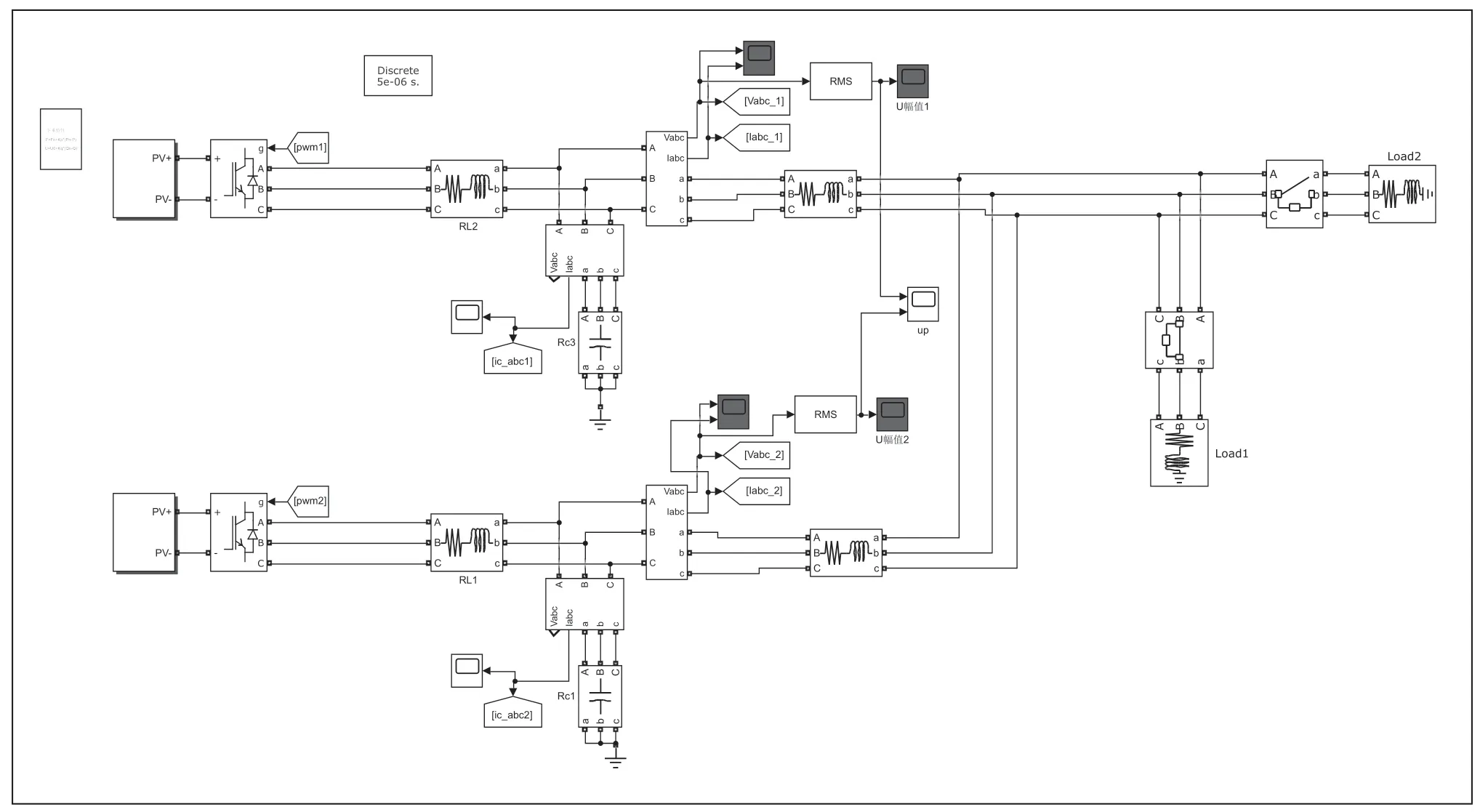
图8 微网主电路Simulink 仿真模型
从整体架构角度来看,使用了下垂控制策略下的三相全桥逆变器被描绘在了图9 中。逆变器输出电压为滤波电容端电压vo,流入微网母线的逆变器输出电流为io。这个系统的主要调控环路由两个组成部分构成,一个是功率环另一个则是电压电流双闭环。其中功率环控制器会根据对逆变器输出的电压电流采集后得出对应的结果并以此推算出来逆变器输出的有功功率P 和无功功率Q 并且依照 P-f 和 Q-V下垂特性的公式去调整参与内环控制相应的设定值参考电压V 和参考频率f;内环控制器采用电压电流双闭环控制它旨在确保整个控制过程中的良好的电压源外特性,进一步提高了高效响应系统调整的能力。
■3.2 参数设计
具体仿真参数如表1 所示。
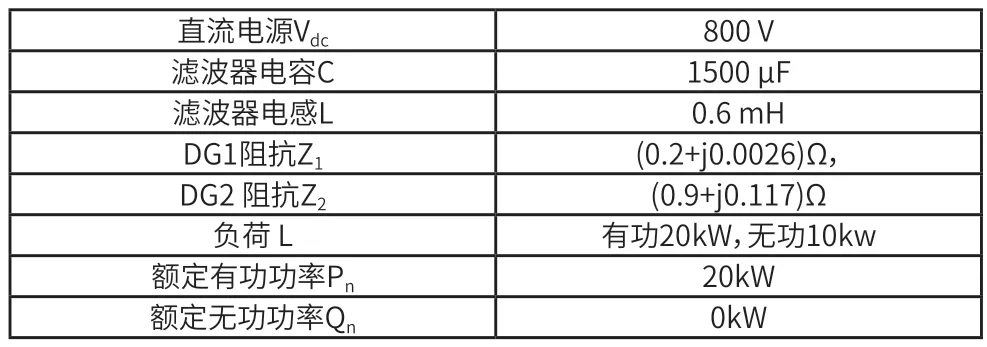
表1 仿真参数表
设定模拟流程:初始阶段,DG1、DG2 和L1 开始运作,L2 在0.3s 时启动,而在0.6s 时L1 停止工作。
■3.3 仿真结果对比
观察图10~图12 可知,当采用传统的P-V/Q-f 下垂控制方法时,当时间在0.3s 处,DG1 与DG2 的有功功率分别提升至20kW 及10kW,而其无功功率为10kW;而在时间到0.6s 的时候,两者的有功功率均降低为10kW,同时他们的无功功率亦相应地减少到了5kW。尽管如此,我们发现DG1 和DG2 之间的有功功率差异相对较小,但他们间的无功功率并未得到合理的分配合理化处理,导致两者间存在着明显的输送失衡现象,并且它们的输出电压也有了显著的变化,这主要是受到线路阻抗不同所带来的影响。
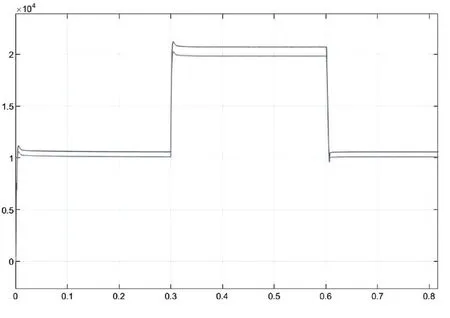
图10 传统下垂控制下有功功率输出
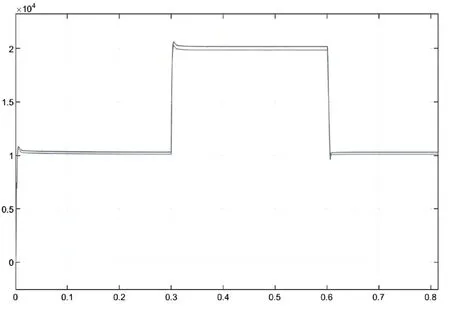
图11 PSO 改进下垂控制下有功功率输出
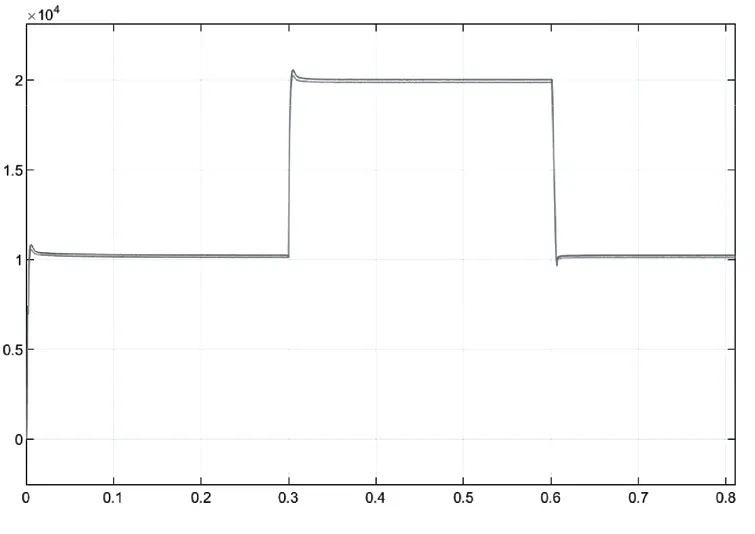
图12 本文改进下垂控制下有功功率输出
在采用本文所提出的改进下垂控制以及PSO 改进下垂控制策略后,从图13~图15 及图16~图18 中可以看出,在改进下垂控制的作用下在0.3s 时,DG1 和 DG2 的有功功率由10kw 增加到20kw,无功功率由5kw 增加到10kw;0.6s 时,DG1 和 DG2 的有功功率由20kw 下降到10kw,无功功率由10kw 下降到5kw,系统总体的工作状态大致相同,但DG1 和 DG2 之间输出偏差大幅减小了,同时即时输出电压出现高度的重合现象,说明均达到了合理均分的目的。
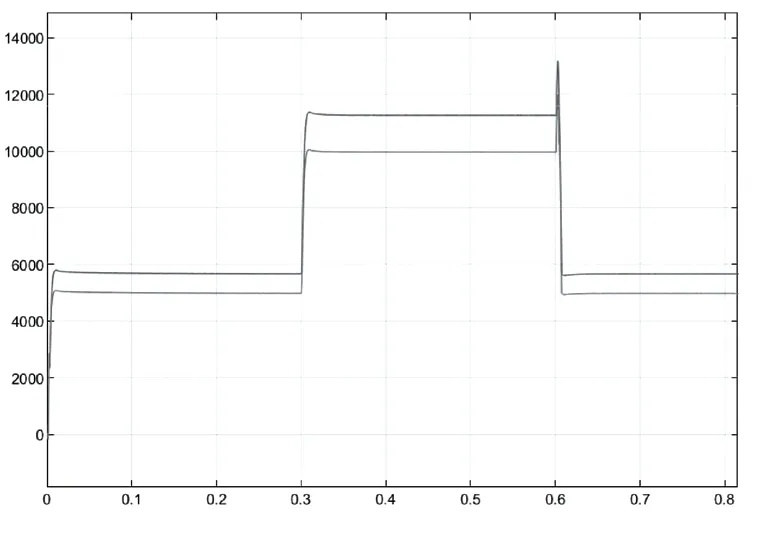
图13 传统下垂控制下无功功率输出

图14 PSO 改进下垂控制下无功功率输出
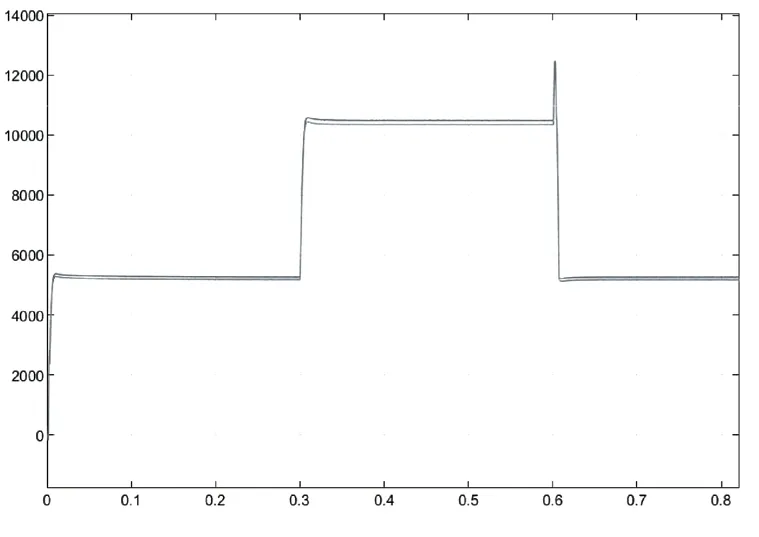
图15 本文改进下垂控制下无功功率输出
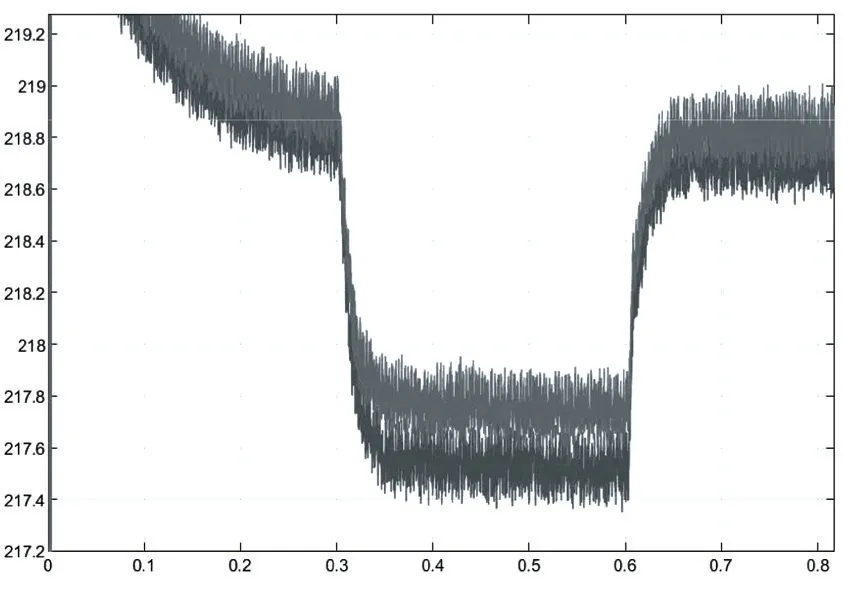
图16 传统下垂控制下输出电压
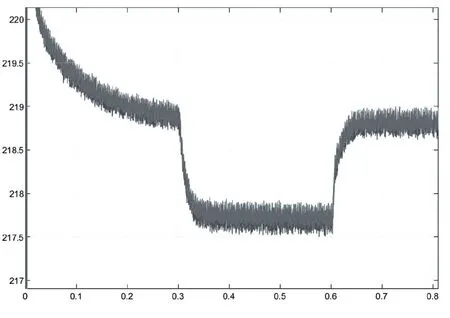
图17 PSO 改进下垂控制下输出电压
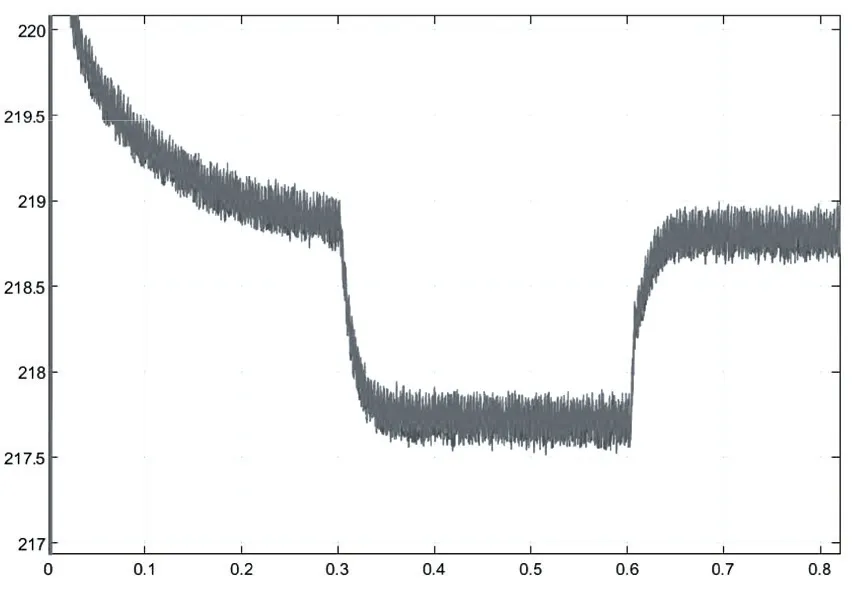
图18 本文改进下垂控制下输出电压
同时,由于所采用的算法不同,2 种改进策略的结果亦有差异。从图19~图20 中可以看出,在0~0.3s 及0.6s 以后,本文改进下垂控制下系统的有功功率输出偏差在85W左右,无功功率输出偏差在95W 左右;PSO 改进下垂控制下系统的有功功率输出偏差在225W 左右,无功功率输出偏差在235W左右;从图21~图22中可以看出,在0.3s~0.6s,本文改进下垂控制下系统的有功功率输出偏差在145W 左右,无功功率输出偏差在155W 左右;PSO 改进下垂控制下系统的有功功率输出偏差在420W 左右,无功功率输出偏差在430W 左右;由此可见混合优化算法比传统PSO 算法的寻优能力强,系统更稳定,误差更小。
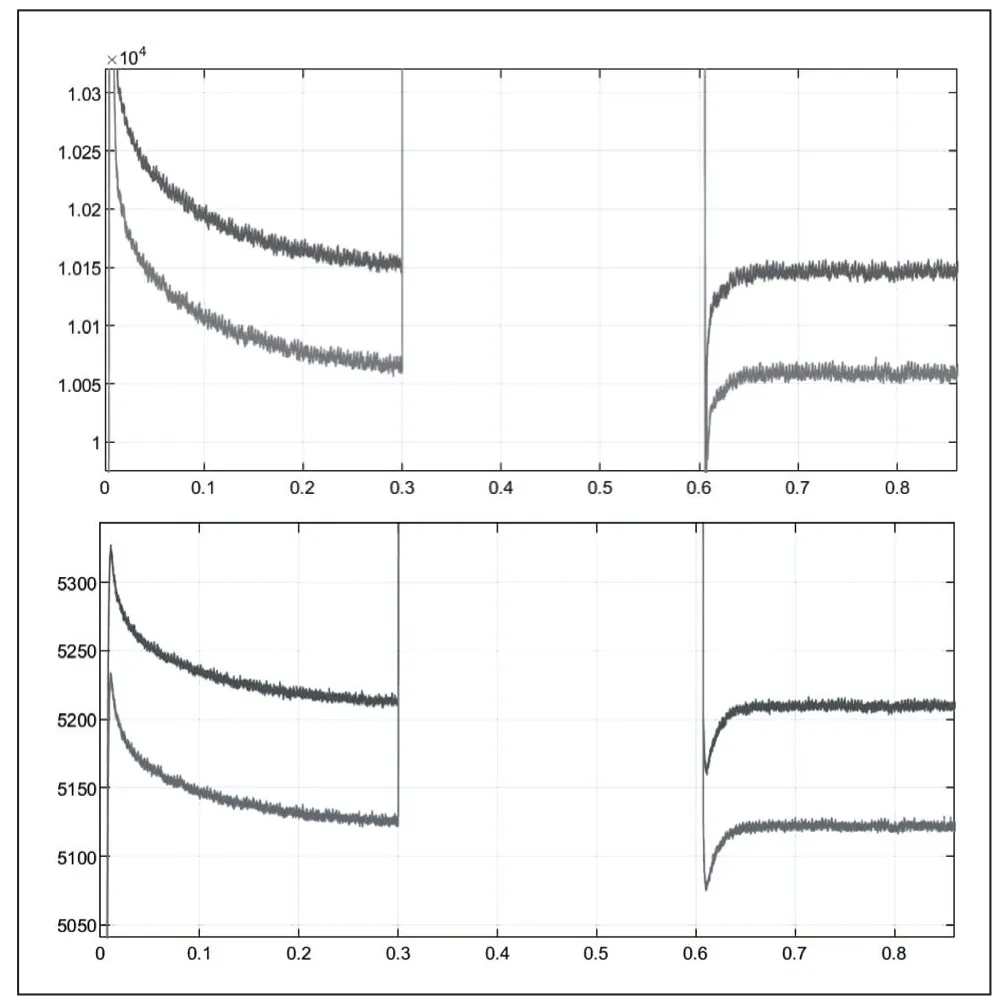
图19 本文改进下垂控制下有功无功功率输出
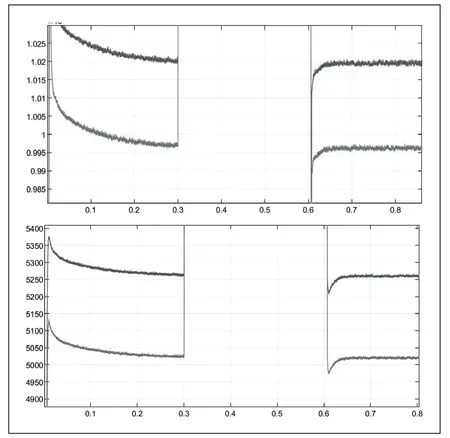
图20 PSO 算法改进下垂控制下有功无功功率输出
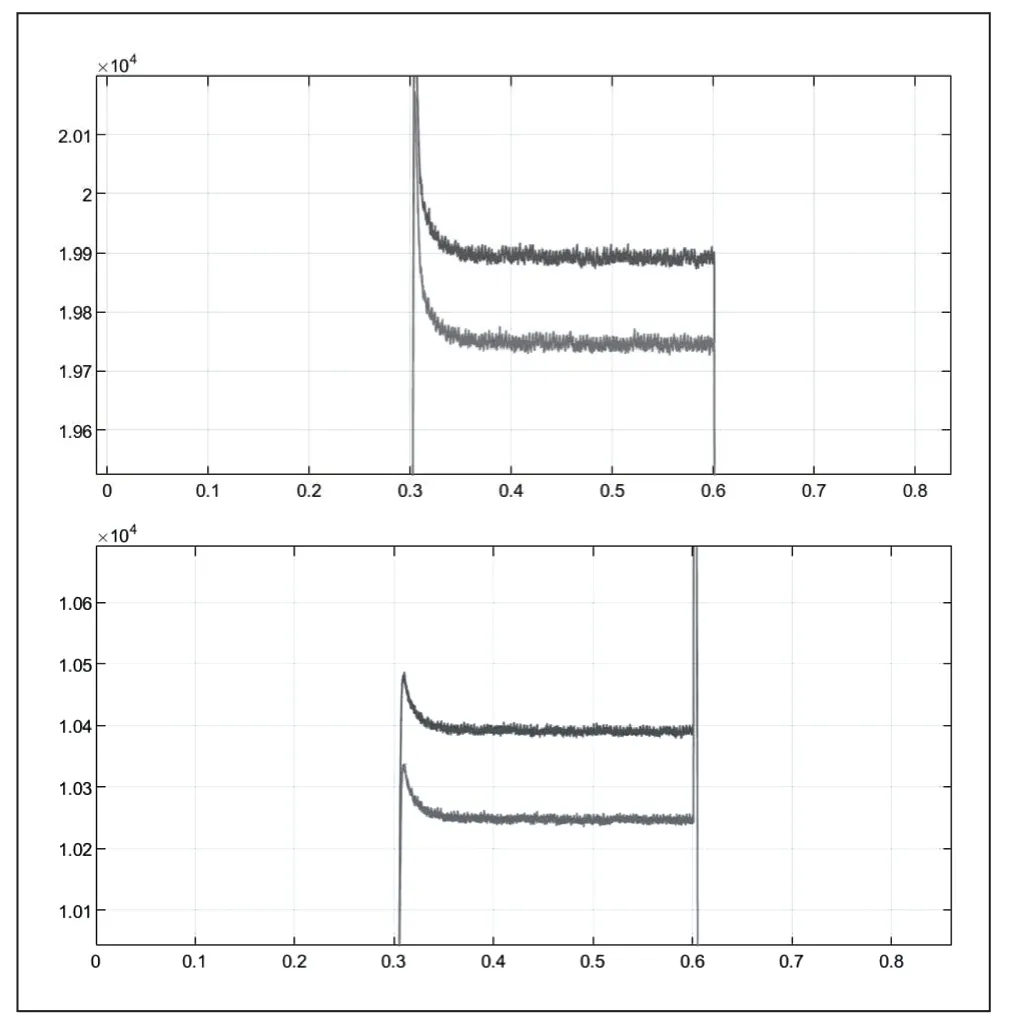
图21 本文算法改进下垂控制下有功无功功率输出
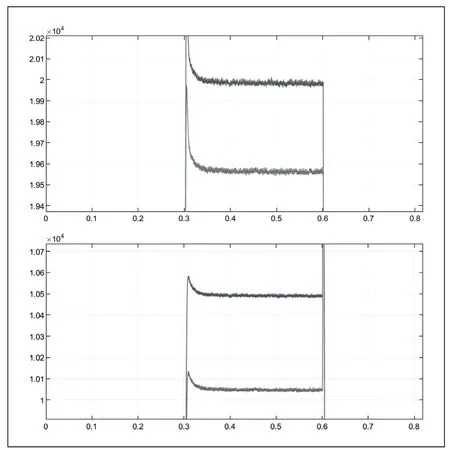
图22 PSO 算法改进下垂控制下有功无功功率输出
4 结论
文中对传统下垂控制未考虑到逆变器输出阻抗、线路阻抗的影响导致的功率分配不均的问题开展了研究,提出了一种基于混合智能算法的改进下垂控制策略,现将主要工作和结论总结如下:分析了传统下垂控制的局限性,对此提出了加入积分微分环节的改进方法,又由于控制参数选取上的困难,同时由于PSO 与GA 都有各自的缺点,提出利用PSO与GA 相结合的混合算法对本文控制参数进行优化,并在MATLAB/Simulink 搭建仿真,用传统下垂控制与基于PSO的改进下垂控制与本文提出的基于混合算法的改进下垂控制策略作对比,得出本文所提出的基于混合算法的改进下垂控制策略在线路阻抗不平衡时,可以改善功率分配不均以及电压幅值跌落的能力,提高系统的鲁棒性。
猜你喜欢
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
山东冶金(2019年3期)2019-07-10
测控技术(2018年10期)2018-11-25
消费导刊(2018年10期)2018-08-20
浙江工业大学学报(2017年5期)2018-01-22
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
系统医学(2016年8期)2016-02-20
物理与工程(2014年4期)2014-02-27