三维激光扫描技术在老旧小区改造测量中的应用
2024-01-30 02:34黄开鑫王光泽罗知真
江西测绘 2023年4期
黄开鑫 王光泽 罗知真
(南昌市测绘勘察研究院有限公司 江西 南昌 330038)
1 引言
随着我国城市化进程的快速发展以及人们对生活环境改善的迫切需求,越来越多的城市对设施陈旧、老化、配套设施不齐的老旧小区进行提升改造。老旧小区缺乏翔实的大比例地形图、树木及建筑立面图等现状基础数据。传统的基础数据采集方法是:外业使用全站仪、测距仪、皮尺等设备获取三维坐标和长宽尺寸等数据,内业结合外业草图进行制图,但该方法投入人力大、作业时间长、工作效率低。三维激光技术是一种新型技术,以全数字化、快速、高精度和不接触的特点[1],利用三维激光技术进行外业的点云数据采集,内业通过仪器自带软件进行点云数据的去噪、自动拼接、配准和坐标转换等工序,再借助制图软件完成各种图件编制[2]。该方法外业采集时间短、工作效率高、点云数据信息量大且精度高,很好地补充了传统方法的不足。
2 项目需求及技术流程
2.1 项目需求及难点
经技术调研,项目需求主要有:一是对测区进行约0.65km2的1∶500 地形图测绘;二是对测区范围内约3700 棵胸径10cm 以上的树木进测量和标注树木品种,并对树穴(围护设施)进行测量;三是对测区范围内约155000m2建筑物外立面进行测量,绘制建筑物立面示意图,并按阳台、店招、门、窗户、面砖等要素和材质进行分类统计。甲方为节约时间和成本,由设计方现场调研和普查,减少重复户型建筑的立面测量工作,并用不同的颜色区分不同户型的建筑,立面测量时选择同一色中的任意一栋建筑即可,未填充色彩的建筑需要全部测量建筑立面;四是需要在10 个工作日内提供以上所有测绘成果。采用常规方法无法满足甲方的工期要求,且测区的空域限飞和空间狭小情况也无法采用无人机作业模式。
从实地踏勘得知,本项目实施过程中主要困难是测区内的人流、车流量大,测区范围内植被茂盛,大多数的树木为樟树,枝叶茂密,遮挡严重。GNSS RTK图根控制布设难度较大。
2.2 作业模式的选取
根据项目特点,采用设站式三维激光扫描进行实地扫描,并通过点云配准技术进行拼接,可实现大部分外业数据一次性采集,适当进行补充测绘即可完成外业数据的采集工作。文献[3]通过多种点云数据匹配模式,得出了基于标靶的点云数据配准精度与基于测站后视的点云数据配准精度接近且较高的结论。文献[4−5]系统阐述了激光点云数据进行大比例尺地形图测绘的方法和可行性。文献[6−8]通过实例方式验证了三维激光扫描技术在建筑物立面测量中的优越性和精度的可靠性。因此,选用三维激光扫描进行外业数据采集,结合内业编辑完成本项目,是目前比较理想的作业模式。
2.3 技术流程
经实地踏勘及技术调研,依据甲方的技术要求,该项目的技术流程可分为测前准备、外业数据采集、内业数据处理及成果交付四个环节,其技术流程图如下:
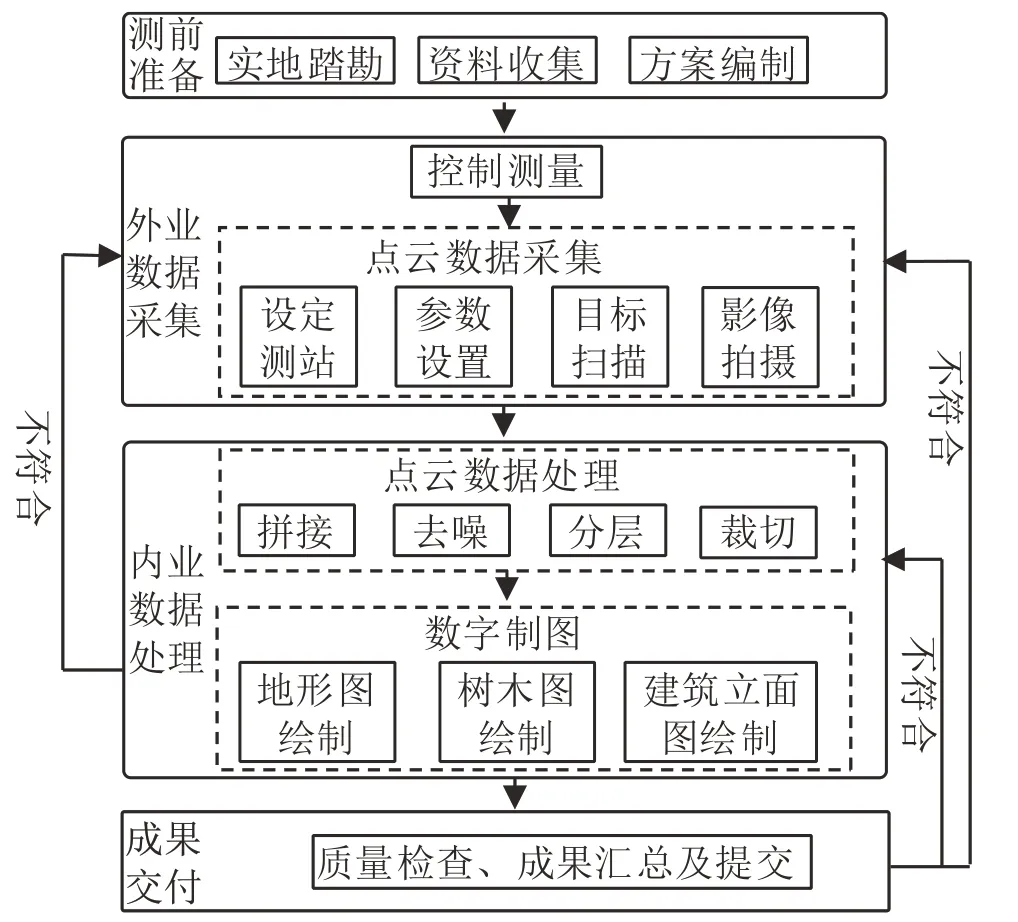
图1 技术流程图
3 基础数据获取
3.1 测前准备
3.1.1 工作内容和要求
在测绘工作开展前,主要准备工作有:
(1)资料收集:收集测区已有的平面点和高程点的起算数据,已有的数字线划图数据,并对以上资料进行可靠性检验。
(2)实地踏勘:通过对测区的踏勘,详细掌握测区及其周边的环境,并巡查测区已控制点是否保存完好,巡视已有数字线划图的现势性是否满足项目的要求等。
(3)编制方案:结合实地踏勘情况和甲方的测量需求,编制项目技术实施方案。
(4)人员设备准备:组织人员、协调仪器设备,对投入的技术人员进行培训,明确工作职责和任务目标。
3.1.2 方案编制
依据甲方需求和规范,对本项目的技术实施方案进行编制:
(1)布设图根控制,再基于测站式点云采集。扫描仪采用Leica P50,该仪器为长测程三维激光扫描仪,测程最远可达1 km。
(2)规划好点云扫描设站点、扫描路线和采集时间等工作。点云采集时间选择在上午9:30~下午4:30,夜间作业时间可选择在夜间8:00之后。
(3)点云配准软件采用Cyclone,地形图绘图采用北京山维EPS 点云测图软件,立面图采用制图软件进行绘制,利用自行设计的“建筑立面测量要素分类与统计程序1.0”程序进行立面要素分类与统计工作等。
3.2 外业数据采集
3.2.1 控制点测量
(1)平面控制测量
为保证测量精度,采用先控制后碎部的原则。平面控制点按两级布设,先采用RTK 按三级要求布设高等级平面控制点,后采用图根导线加密。项目采用网络RTK 测量,基准站利用江西省连续运行参考站JXCORS。本项目共布设控制点60 个,点位密度及分布情况满足地形图测绘要求。平差计算后的相对于图根起算点的实测最弱点精度为±9mm,相对于邻近图根点的实测最弱点精度为±6 mm,各项精度指标均满足规范要求。
(2)高程控制测量
采用DS05 级的天宝DINI03 电子水准仪配合3米铟钢尺进行图根水准测量。利用科傻控制测量软件以距离定权进行水准平差计算,高程值取位至毫米。平差后的最弱点高程中误差为0.9 mm,最弱相邻点高差中误差为0.5 mm,均满足规范要求。
3.2.2 点云数据采集
(1)主路设站间距选择80 米左右,小路、支路及宅间道路的站点间距选择40 米左右,地形要素采集的站点间距可适当增加,确保数据一定的重叠度,保证数据完整、齐全,由于扫描线路节点多,可设置标靶进行标记。
(2)设置扫描参数,主路和需要立面测绘的站点采用6.3 mm@10 m 分辨率作业,其他地方的站点设置较低分辨率12.5 mm@10 m。该方式有利于提高点云质量,减少冗余点云数据,提高作业效率。
(3)目标物扫描时,先在控制点上架设仪器,后在另一控制点上定向,完成参数设置、设站及定向工作后,方可进行目标物扫描。对需要立面图的建筑进行加密扫描,保证立面数据的完整无缺,一般一栋建筑四周立面数据需要架设6 站。对地形图要素扫描的原则是:在确保完整覆盖整个测区的前提下少设站。目的是提高工作效率和减少拼接误差。本次采集工作共投入4 人进行外业扫描,共设置测站235站,扫描作业时间2天半。
(4)目标物的纹理图像数据采集可利用三激光扫描仪内置相机拍摄的方式,一体化采集影像数据,后期可实现与点云数据的自动整合,同时利用手机或相机进行影像或视频拍摄,特别要对地形和立面复杂区域进行拍摄,目的是恢复作业人员的记忆,在内业数据制图时,帮助数据制图人员在不返回测区的前提下胜利完成制图工作。
(5)外业人员还需要进行树种调查,因测区内大多为樟树,因此,只需要对非樟树进行调查,将树木的位置和树种标示在外业草图上,同时也进行影像拍摄,以助内业人员更好地判断树种和位置。
3.3 内业数据处理
3.3.1 点云数据处理
1)点云拼接
扫描仪在各个测站获取的是局部点云,要得到测区的完整点云数据,需将外业采集的扫描数据导入Cyclone 软件,再进行点云的自动拼接融合、配准等工序才能拼接出完整的测区点云数据。
2)点云处理
拼接好的点云数据需要进行统一化、去噪、分层、裁切等工序才能满足后序数据制图要求。点云统一化的目的是将站点云统一处理为单一的合并点云,也可在该过程中进行点云的等比例抽稀。因统一化操作是不可逆的,在执行该操作前应做好备份工作。点云去噪的目的是让有效点保留,无效点去除,比如点云数据中的人、车等非地形地物要素均可去除。点云的分层与裁切的本质是将点云划分成若干个点云子集,以便数据的分类导出,便于后期的数据制图工作。
3.3.2 数据制图
(1)地形地物和树木绘制
本次利用北京山维EPS 立体测图软件进行地形图和树木的绘制工作。在绘地形图时充分利用三维扫描仪获取点云数据、纹理图像数据及人工拍摄的相片或视频资料进行地形地物要素的编辑,并对部分遮挡区域的图进行整饰,必要时适当进行外业补充测量,确保地形图的完整、齐全。绘制树木专题图时,需要绘制树木及树穴(围护实施)位置,并结合外业树种调查情况,在对应的树木位置标注树种。
(2)建筑点云数据再处理
为缓解大量点云数据对电脑运行速度的影响,适当优化已处理好的点云数据,可删除树木、路边线等非建筑点云的点云数据,并对点云进行整体着色,利用制图软件进行点云的展示以辅助建筑立面图绘制。
(3)建筑立面图绘制
在点云导入前,要在制图软件中新建三维绘图模式,并设置数据精度和尺寸单位。在制图软件菜单栏中点击插入→点云→附着,找到点云存放的路径,找到相应格式的点云数据,即可导入制图软件中。由于点云是三维坐标数据,但是建筑立面图所需的仅仅是二维数据,所以我们需要设置新的UCS坐标系,才能以正视角度进行该建筑的立面图绘制。完成该立面图绘制后,需新建一个二维绘图模式的空白文档,将刚绘好的立面图复制到二维文档中。绘制下一面的建筑立面时,需重复以上操作,直至完成所有的立面图绘制。立面图通过数据质检后,利用自行设计的“建筑立面测量要素分类与统计程序1.0”进行各要素的分类与统计工作等。以下是部分绘制好的建筑立面图。
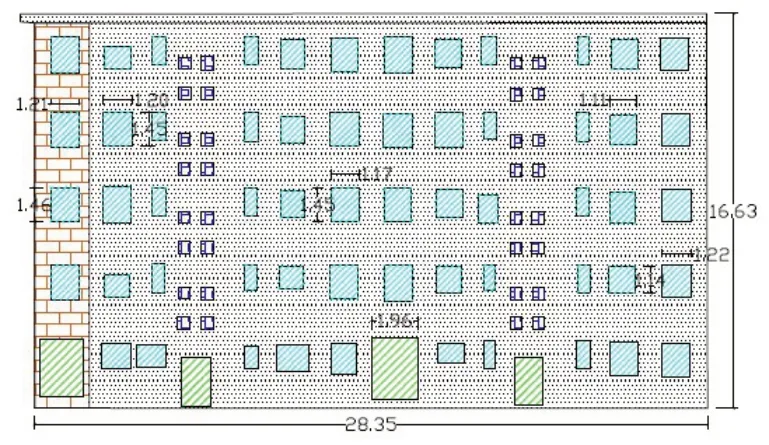
图2 部分建筑立面图
3.4 精度检验
为检验三维激光扫描仪在本项目中的测量精度,采用全站仪结合钢尺丈量方式进行检测,具体如下:
3.4.1 地形地物精度检验
本次地形地物(包含树木)精度检验的采样和中误差情况如下表1,检测结果表明地形地物(包含树木)的间距中误差和点位中误差符合《城市测量规范》(以下简称《规范》)第6.1.6“地物点相对于邻近平面控制点的点位中误差(图上mm)≤0.5(即25cm),地物点相对邻近地物点间距中误差(图上mm)≤0.4(即20cm)的要求;地形地物(包含树木)的高程精度符合《规范》第6.1.7“城市建筑区和基本等高距为0.5m 的平坦地区,1∶500、1∶1000、l∶2000DLG的高程注记点相对于邻近图根点的高程中误差不应大于0.15m”的要求。

表1 地形地物精度检验情况
3.4.2 建筑立面精度检验
如今针对立面测量还没有相关标准,立面成果尺寸精度要求借鉴《规范》第6.1.6“地物点相对邻近地物点间距中误差(图上mm)≤0.4(即20cm)”的规定要求,立面面积精度借鉴《规范》第11.1.5“表11.1.5房产面积测算的精度指标(m2)中三级”精度等级的要求。
(1)立面尺寸精度检验
本次立面测量共涉及建筑物66 栋,按照规范结合现场情况随机抽取建筑物16 栋进行外业检查,检测内容包含:
1)立面要素表达的完整性及正确性;
2)立面要素分类的正确性;
3)立面特征点相对精度。每栋建筑物抽查立面抽查特征边长不少于20条。本次共检测646条特征边长,经核算,立面、尺寸间距中误差为±3.1 cm,检测结果表明中误差符合《规范》要求。
(2)立面面积精度检验
选取了13 栋建筑的部分立面、窗户、门廊等共计81 个面积成果进行检测,检测结果表明面积较差的限差均满足《规范》要求。
4 相关技术问题
经实践,发现三维激光扫描技术在城市老旧小区改造项目测量中的应用中应注意几个问题,具体如下:
(1)外业数据采集模式
同时获取地形图及建筑立面等点云数据,采用先控制后碎部、基于设站的点云数据采集模式。点云拼接方法是绝对拼接方法,该作业模式外业人员投入较多,外业作业效率有所下降,但有效地控制了误差传播,确保了测量精度,且整体比常规的全站仪作业模式效率高。若无需提供基础坐标及其他地形地物要素的项目,可采用基于形状匹配的点云数据采集模式,将大幅提高外业生产效率,充分发挥三维激光扫描仪的外业数据采集优势。
(2)纹理影像采集
三维激光扫描仪具有全天候作业的优势,本项目的数据采集时间有白天和夜间,但夜间的纹理图像数据采集效果欠佳,对纹理图像数据要求较高的项目,不宜在夜间采集数据。在实施过程中,利用了内置相机采集纹理影像数据,但后期制图中发现,三维激光扫描仪采集的纹理影像数据目前没有照相机拍摄的相片清晰和直观,建议在同类项目实施过程中,关闭纹理影像采集功能,一是可提高外业生产效率,二是可大幅降低点云数据文件的大小。
(3)点云数据的传输与处理
扫描仪中的点云数据文件巨大,动辄几十GB,一次性导入耗时长,且数据传输时容易中断或传输失败。可采用分批导入的方式传输数据。点云数据处理有很多操作是不可逆的,在进行数据处理前,建议对点云数据进行备份。
5 结束语
本文以老旧小区改造测量工作为实践对象,系统阐述了三维激光扫描作业流程、数据处理及技术要点等内容。用传统方法校核了地形、地物、地貌及立面图的成果精度。实践证明,三维激光扫描技术可快速高效地采集外业数据,降低了外业作业的劳动强度。在项目实施过程中,应着重测量方案的编制,点云数据采集参数及站点的设置,点云拼接、去噪、分层及裁切的方法和内业成图的技艺等关键技术。当然,三维激光扫描技术也有自身的短板,实际操作中需要借助传统方法进行配合。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
青年文学家(2021年15期)2021-07-19
河北地质(2021年4期)2021-03-08
西部交通科技(2021年9期)2021-01-11
数字技术与应用(2020年1期)2020-04-21
中国铁道科学(2019年5期)2019-10-19
智能建筑与智慧城市(2018年11期)2018-11-28
测绘通报(2018年10期)2018-11-02
中国资源综合利用(2017年2期)2018-01-22
黑龙江科学(2016年5期)2016-03-24