共生理论视角下制造业创新生态系统演化博弈研究
2024-01-27 07:19吴梦娇施进发
华北水利水电大学学报(社会科学版) 2024年2期
吴梦娇,施进发
(华北水利水电大学 管理与经济学院,河南 郑州 450046)
制造业是实体经济的支柱,是供给侧结构性改革的重要领域,是科技创新的主战场,是现代经济体系的重要组成部分。随着市场需求的多样化,制造业转型升级已成为推动企业竞争力提升、实现高质量发展的必由之路[1]。但是制造企业在转型升级过程中仍存在诸多问题,比如:转型升级需求迫切与关键核心技术“卡脖子”相矛盾、技术生命周期不断缩短、自主创新研发能力薄弱、技术不成熟以及外部创新环境不完善等。在此情形下,通过内外部创新的结合以及产业结构的优化来实现制造业的转型升级。目前创新活动不再是单纯依靠企业内部资源进行的技术创新行为,而是通过构建开放、合作且有利于创新的生态系统来实现企业群组间知识来源的拓展,利用优势互补降低创新风险,加速技术转型和发展[2]。创新生态系统已成为创新主体、创新要素、创新环境交互作用下多元主体博弈的结果[3],而多元主体不同博弈策略组合形成不同的共生模型,如互利共生、偏利共生等。因此,厘清创新生态系统中创新主体之间的共生竞合关系以及演化规律是至关重要的。
一、文献综述
对于创新生态系统的内涵,现有研究主要从关系网络、系统学、协同学及创新行为等角度进行界定[4-7]。目前,学界已经形成一种共识,即具有互动需求的多边、异质参与者之间建立的联盟结构,以实现共同的价值主张[8]。创新生态系统的演化过程类似自然界生物种群的共生演化过程[9]。共生演化指系统中各个要素相互依赖、相互影响,长时间进化出互利共生的能力[10]。共生演化也被视为创新生态系统的核心特征。目前,创新生态系统共生演化已成为国内外的研究热点,引起了学者的一系列研究。Still等提出创新生态系统演化的实质是核心成员间的共生关系演化[11]。创新生态系统的共生模式是一种新型的创新组织形态,它通过整合不同的企业、研究机构、政府和社会组织等参与者,建立相互依赖、协作和共享资源知识的合作关系,共同推动创新和价值创造[12]。
制造业创新生态系统的共生主体有政府部门、制造企业、学研机构及中间机构等,因此,制造业创新生态系统进行共生演化的主要表现形式为政产学研协同创新[13]。对制造业创新生态系统的共生行为进行演化博弈研究能够帮助理解演化过程、预测演化路径、解释规律机制,并为决策和政策提供支持,促进政产学研的发展和实践的改进[14]。现有研究对产学研间的双方演化博弈的讨论较多,陈劲等较早将协同创新引入产学研合作演化博弈中,发现降低“搭便车”收益并提升协同创新净收益,产学研合作才能走出“囚徒困境”[15];彭莹等认为,技术突破概率、创新费用和政府激励是影响技术突破创新的关键因素[16];张根明、盛永祥等通过构建产学研演化博弈模型探讨了建立产学研联盟过程中的稳定性[17-18]。部分学者对政产学研三方演化博弈进行了研究,戚湧等构建政产学研三方之间的演化博弈模型,指出合作创新的成本和利益是影响参与主体进行行为选择的主要因素[19];刘和东等对企业、高校和政府之间的利益博弈进行分析,发现政府若考虑自身收益,则会降低政产学研协同创新合作的稳定性[20]。
已有文献对创新生态系统的研究大多基于系统层面,从系统的构建演化、协同创新及运行机制进行讨论,较少从共生演化视角探讨企业与相关主体资源竞争与合作关系如何演化,共生环境对系统进化的影响等问题。除此之外,缺乏通过政府监管促进产学研积极参加共生演化并提高双方创新能力及耦合协调程度的文献,因此,需要对政府、制造企业与学研机构三方的共生行为进行完整的演化研究。鉴于此,以探究制造业创新生态系统共生演化过程中的策略选择问题及动态演化规律为主要研究目标,重点解决三个问题。第一,制造业创新生态系统中的共生主体及其关系是如何表现的?第二,制造业创新生态系统的共生主体参加共生演化的规律是怎样的?第三,如何激励共生主体积极参加共生创新?上述研究为制造业探究共生创新的作用及风险、共生演化的趋势提供有效的理论价值,有利于政府在开放式创新模式下为共生主体提供共生环境、新思维模式及良好导向。
二、基本假设与模型构建
基于生态学理论与共生演化理论,制造业创新生态系统中的政府部门、制造企业、学研机构等作为分解者,是创新群落与创新环境物质、能量循环的关键载体[21]。因此,将在共生环境内的创新主体看作一个共生的整体,称其为创新共生体。当创新共生体均选择创新时会产生共生关系,但是由于支付偏好、资源和技术以及竞争环境等因素的影响,共生主体有“积极创新”和“消极创新”两种策略选择。因此,当共生主体均选择“积极创新”策略时,共生主体之间属于“互利共生”关系;当共生主体均选择“消极创新”策略时,共生主体之间属于“偏利共生”关系。
(一)模型假设
假设1G表示政府,政府的策略集合:{积极监管,消极监管},x表示政府在创新生态系统共生过程中选择“积极监管”策略的群体比例。A表示制造企业,制造企业的策略集合:{积极创新,消极创新},y表示制造企业在创新生态系统内选择“积极创新”策略的群体比例。B表示学研机构,学研机构的策略集合:{积极创新,消极创新},z表示学研机构在创新生态系统内选择“积极创新”的群体比例。其中,x,y,z的取值范围在0到1之间,在演化博弈过程中,基于有限理性和利益最大化角度,三个群体通过重复试验和选择策略,最终寻求稳定均衡点[22]。
假设2在创新生态系统内,政府作为管理与监督部门,在参与成员进行共生演化过程中起到引导和激励作用。当政府选择“积极监管”时,政府为制造企业制定政策法规以及奖惩机制将会产生管理成本,用J表示。为提高制造企业与学研机构的科学技术水平并引导激励制造企业与学研机构选择“积极创新”策略,政府分别向制造企业与学研机构提供Ai(i=1,2)的科学技术补贴。此时,由于税收等产生的基本收益为V1,同时政府积极监管将获得社会名誉收益E[23]。当政府选择“消极监管”时,由于税收等产生的基本收益为V2(V1>V2),此时不对制造企业与学研机构进行科学技术补贴,管理成本可忽略不计。制造企业与学研机构在参加协同创新前早已清楚各自的责任和义务,若其中一方出现“消极创新”的情况,政府将收回对其提供的科研技术补贴,并对消极参加的一方处以罚金F[22、24]。

假设4当制造企业与学研机构其中一方选择“积极创新”、另一方选择“消极创新”时,选择“积极创新”的制造企业和学研机构创新成本增量为Ki1(i=1,2),选择“消极创新”的制造企业和学研机构成本增量为Ki2(i=1,2),“积极创新”一方的收益增量为(1-θ)T,“消极创新”一方由于信息资源共享等情况将会得到投机收益θT,θ表示投机收益分配系数[27],T表示制造企业与学研机构的总收益增量。当制造企业与学研机构均选择“消极创新”时,制造企业与学研机构之间合作程度太低,合作创新成本增量与合作创新收益增量可忽略不计。
(二)收益矩阵
基于上述模型假设及参数,设定政府、制造企业、学研机构三个共生主体的收益矩阵,如表1所示。

表1 三方博弈收益矩阵
三、演化博弈的演化稳定策略求解
根据上述的收益矩阵,可以计算出政府、制造企业和学研机构三方的复制动态方程,分别对创新共生体的策略进行稳定性分析。
(一)政府的策略稳定性分析
通过计算政府选择“积极监管”策略与“消极监管”策略的收益以及平均期望收益,从而得出政府的复制动态方程为:
F(x)=dx/dt=x(1-x)(y(-A1-F)+z(-A2-F)+
E+V1-V2+2F-J)。
(1)
设G(y)=y(-A1-F)+z(-A2-F)+E+V1-V2+2F-J,则F(x)=x(1-x)G(y),dF(x)/dx=(1-2x)G(y)。当G(y)=0时,y*=(z(-A2-F)+E+V1-V2+2F-J)/(A1+F),此时F(x)=0,所有的x均处于演化稳定状态。当演化稳定策略满足F(x)=0且dF(x)/dx<0时,根据微分方程的稳定性原理可知,此时处于演化稳定状态。由于∂G(y)/∂y=-A1-F<0,因此,G(y)是属于y的单调递减函数。当y
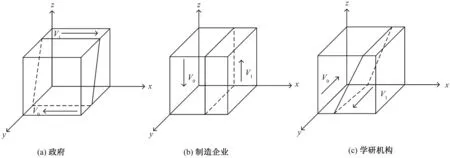
图1 三方策略演化相位图
图1(a)中政府选择“消极监管”策略的概率为P0,对应的体积为VP0,选择“积极监管”策略的概率为P1,对应的体积为VP1,经计算得:
V2+2F-J)/(A1+F)dzdx
(2)
推论一:政府选择“积极监管”策略的概率与社会名誉收益、政府对制造企业与学研机构的罚金、积极监管时的基本收益呈正相关;与积极监管时的管理成本、消极监管时的基本收益、对制造企业与学研机构的科学技术补贴呈负相关。
证明:分别对VP1内各个要素求一阶偏导数,得∂VP1/∂E>0,∂VP1/∂F>0,∂VP1/∂V1>0,∂VP1/∂J<0,∂VP1/∂V2<0,∂VP1/∂A1<0,∂VP1/∂A2<0,因此,当E,F,V1上升,或J,V2,A1,A2下降时,政府选择“积极监管”策略的概率将上升。
(二)制造企业的演化稳定策略求解
通过计算制造企业选择“积极创新”策略与“消极创新”策略的收益以及平均期望收益,从而得出制造企业的复制动态方程为:
F(y)=y(1-y)(x(A1+F)+z(qωΔR-pγΔC+
K11+K12-T)+(1-θ)T-K11)。
(3)
设G(x)=x(A1+F)+z(qωΔR-pγΔC+K11+K12-T)+(1-θ)T-K11,则F(y)=y(1-y)G(x),dF(y)/dy=(1-2y)G(x)。当G(x)=0时,x*=-(z(qωΔR-pγΔC+K11+K12-T)+(1-θ)T-K11)/(A1+F),此时F(y)=0,所有的y均处于演化稳定状态。由于∂G(x)/∂x=A1+F>0,故G(x)是x的单调递增函数。当x
图1(b)中制造企业选择“消极创新”策略的概率为P0,对应的体积为VP0,选择“积极创新”策略的概率为P1,对应的体积为VP1,经计算得:
(4)
推论二:制造企业选择“积极创新”策略的概率与收益分配系数、制造企业与学研机构的耦合协调度、制造企业的创新能力、学研机构的创新能力、政府对制造企业的科学技术补贴、合作创新收益增量、政府对制造企业的罚金、制造企业与学研机构的总收益增量(一方积极创新而另一方消极创新,且投机收益系数小于0.5)、制造企业的创新成本增量、创新生态系统中制造企业的重要程度(制造企业创新能力大于学研机构创新能力)呈正相关;与成本增量的分摊系数、制造企业的创新成本增量、合作创新深度、投机收益系数、合作创新成本增量、制造企业与学研机构的总收益增量(一方积极创新而另一方消极创新,且投机收益系数大于0.5)、创新生态系统中制造企业的重要程度(制造企业创新能力小于学研机构创新能力)呈负相关。
证明:VP1分别对各个要素求一阶偏导数,得∂VP1/∂q>0,∂VP1/∂ω>0,∂VP1/∂ω1>0,∂VP1/∂ω2>0,∂VP1/∂A1>0,∂VP1/∂ΔR>0,∂VP1/∂F>0,∂VP1/∂T>0(θ<0.5),∂VP1/∂K12>0,∂VP1/∂α>0(ω1>ω2),∂VP1/∂p<0,∂VP1/∂K11<0,∂VP1/∂γ<0,∂VP1/∂θ<0,∂VP1/∂ΔC<0,∂VP1/∂T<0(θ<0.5),∂VP1/∂α<0(ω1<ω2)。因此,当q,ω,ω1,ω2,A1,ΔR,K12,T(θ<0.5),α(ω1>ω2)上升,或p,F,K11,γ,θ,ΔC,T(θ>0.5),α(ω1<ω2)下降时,制造企业选择“积极创新”策略的概率将上升。
(三)学研机构的演化稳定策略求解
通过计算学研机构选择“积极创新”策略与“消极创新”策略的收益以及平均期望收益,从而得出学研机构的复制动态方程为:
F(z)=z(1-z)(x(A2+F)+y((1-q)ωΔR-
(1-p)γΔC+K21+K22-T)+(1-θ)T-K21)。
(5)
同理,经计算可得,当x
图1(c)中学研机构选择“消极创新”策略的概率为P0,对应的体积为VP0,选择“积极创新”策略的概率为P1,对应的体积为VP1,经计算得:

(6)
推论三:学研机构选择“积极创新”的概率与成本的分摊系数、制造企业与学研机构的耦合协调程度、制造企业的创新能力、学研机构的创新能力、政府对学研机构的科学技术补贴、合作创新收益增量、政府对学研机构的罚金、制造企业与学研机构的总收益增量、学研机构的创新成本增量、创新生态系统中学研机构的重要程度呈正相关;与学研机构的创新成本增量、合作创新深度、投机收益系数、合作创新成本增量、收益分配系数、制造企业与学研机构的总收益增量、创新生态系统中学研机构的重要程度呈负相关。
证明:VP1分别对各个要素求一阶偏导数,得∂VP1/∂p>0,∂VP1/∂ω>0,∂VP1/∂ω1>0,∂VP1/∂ω2>0,∂VP1/∂A2>0,∂VP1/∂ΔR>0,∂VP1/∂F>0,∂VP1/∂T>0(θ<0.5),∂VP1/∂K22>0,∂VP1/∂α>0(ω1<ω2),∂VP1/∂K21<0,∂VP1/∂γ<0,∂VP1/∂θ<0,∂VP1/∂ΔC<0,∂VP1/∂q<0,∂VP1/∂T<0(θ>0.5),∂VP1/∂α<0(ω1>ω2),因此,当p,ω,ω1,ω2,A2,ΔR,K22,T(θ<0.5),α(ω1<ω2)上升,或F,K21,γ,θ,ΔC,q,T(θ>0.5),α(ω1>ω2)下降时,学研机构选择“积极创新”策略的概率将上升。
(四)博弈均衡点与稳定性分析
根据上述复制动态方程F(x),F(y),F(z)分别求x,y,z的偏微分,可得到动力系统的雅克比矩阵
(7)
分别将E1(0,0,0),E2(0,0,1),E3(0,1,0)、E4(0,1,1),E5(1,0,0),E6(1,0,1),E7(1,1,0)、E8(1,1,1)代入雅克比矩阵中,得到对应的特征值,如表2所示。
由于模型参数比较复杂,为了便于分析不同均衡点对应特征值的符号,在不影响研究目标的情况下,根据现实情况,假设E+V1-V2-A1-A2-J>0,A1+F+qωΔR-pγΔC+K12-(1-θ)T>0,A2+F+(1-q)ωΔR-(1-p)γΔC+K22-(1-θ)T>0。即政府选择“积极监管”策略、制造企业与学研机构选择“积极创新”策略的收益大于政府选择“消极监管”策略、制造企业与学研机构分别选择“消极创新”策略所获得的收益[28]。具体分为四种情况,如表3所示。
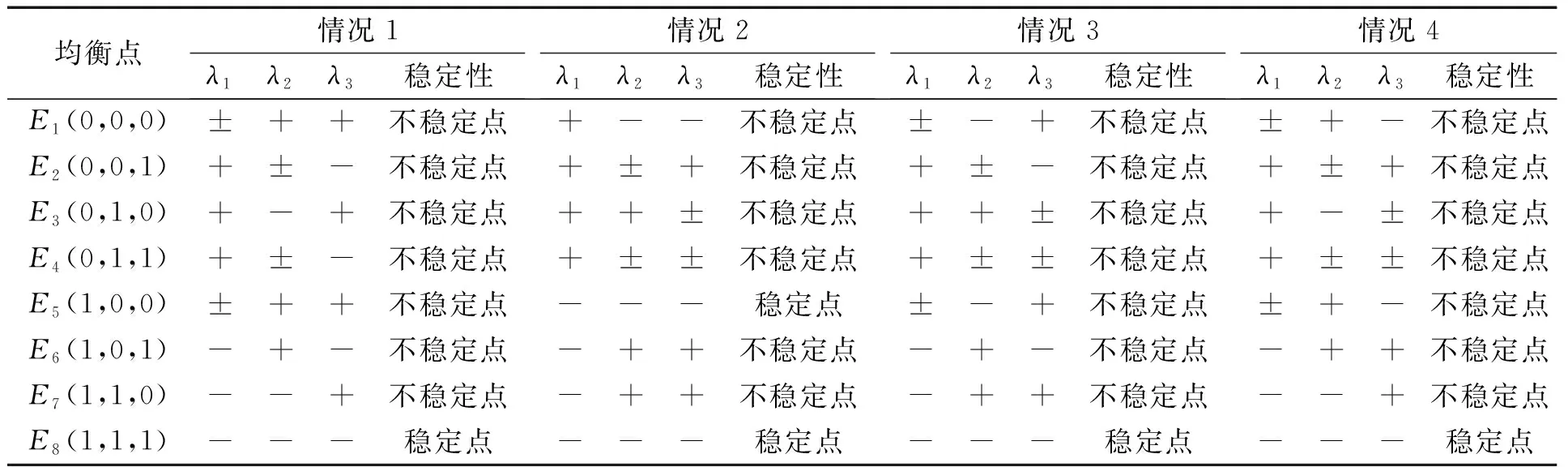
表3 均衡点局部稳定性
情况1:当θT>K11,θT>K21时,此时只有均衡点E8(1,1,1)对应的特征值小于0,满足演化稳定条件,因此{积极监管,积极创新,积极创新}为对应的演化稳定策略,此时的稳定关系为“互利共生”。
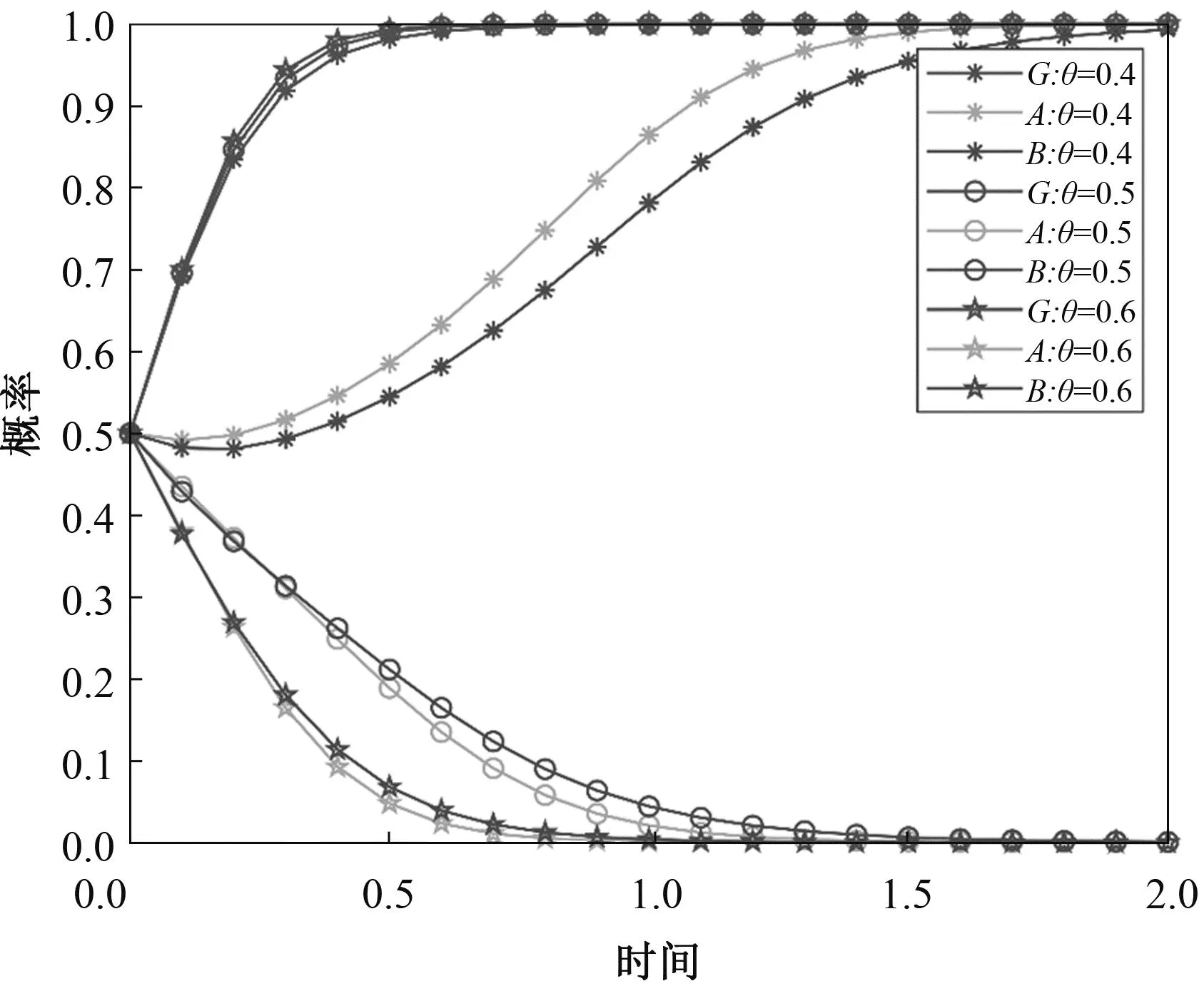
情况2:当E+V1+2F>V2+J,A1+F+θT 情况3:当A1+F+θT 情况4:当A2+F+θT 综上所述,在情况1、情况3、情况4的假设条件下,演化稳定均衡点均为E8(1,1,1),稳定关系为“互利共生”。在情况2的假设条件下,演化稳定均衡点为E5(1,0,0)和E8(1,1,1),稳定关系为“偏利共生”和“互利共生”。无论在哪种情况下,政府的演化稳定策略均为“积极监管”。但是当演化稳定均衡点为E5(1,0,0)时,制造企业与学研机构的演化稳定策略均为“消极创新”,此时不利于制造业创新生态系统进行协同创新,属于不理想状态。 为更深层次地了解创新共生体的演化过程,更直观地反映各参数的变化对参与主体共生行为的影响,基于上述对演化博弈模型的建立与分析,设定初始参数值并利用MATLAB软件进行仿真分析。 首先,模型中的大部分参数通过《中国科技统计年鉴》、国家统计局的年度数据以及产学研专题数据进行赋值。比如:“A1,A2”根据《中国科技统计年鉴》中的“R&D经费对企业支出、R&D经费对高等学校支出、R&D经费对研究机构支出”进行赋值;“K11,K12,K21,K22,ΔR,ΔC”根据科学技术中的“新产品销售收入、R&D经费支出”和工业中的“营业收入、营业成本”等收入与支出指标进行赋值。其次,借鉴相关文献中关于产学研协同创新的相关参数的设定方式[29-30],并咨询产学研协同创新领域的专家对“E,F,T”进行估算。最后,调查了一些制造业企业(如中航光电科技有限公司、河南神火集团、卫华集团、中铁工程装备集团、中车大同电力机车有限公司、金川集团、河南矿山起重机有限公司、海尔集团、宇通集团、迈科集团等)。除此之外,结合各地政府出台的关于产学研合作和制造业的相关补贴政策法规、中国制造业发展研究报告等对初始参数进行估算,整理得到参数值,如表4所示。该值仅代表一般比例,主要用于验证制造业高质量发展的演化博弈模型及相关参数。 表4 仿真参数赋值 分别令x=y=z=0.2,x=y=z=0.5,x=y=z=0.8,得出初始意愿对共生行为的演化结果,如图2(a)所示。由仿真结果可知:在初始意愿从0.2提高至0.5的过程中,系统内共生主体的演化趋势由{积极监管,积极创新,积极创新}转变为{积极监管,消极创新,消极创新},由此说明0.2与0.5之间存在阙值。在此过程中制造企业的收敛速度超过了学研机构的收敛速度,因此,制造企业受初始意愿的影响程度较大。在初始意愿从0.5提高至0.8的过程中,制造企业、学研机构向“积极创新”收敛的速度均有所提高,但是政府向“积极监管”收敛的速度略有减慢。这是因为当制造企业与学研机构的初始意愿较低时,政府为了推动发展从而快速发挥主导作用,而当制造企业与学研机构的初始参与意愿较高时,政府可能为了保持市场的灵活性和创新的自主性从而减慢收敛速度。 分别令x=0.2,y=z=0.2;x=0.8,y=z=0.2,即当制造企业与学研机构的初始意愿保持在0.2,政府的初始意愿分别改变为0.2和0.8时,演化结果如图2(b)所示。由仿真结果可知:当制造企业与学研机构处于较低意愿时,提高或降低政府的参与意愿只影响制造企业与学研机构向“消极创新”策略的收敛速度,但无法改变其最终意愿。同理,分别令x=0.2,y=z=0.8;x=0.8,y=z=0.8,演化结果如图2(d)所示。由仿真结果可知:当制造企业与学研机构处于较高意愿时,提高或降低政府的参与意愿只影响制造企业与学研机构向“积极创新”策略的收敛速度,但无法改变其最终意愿。分别令x=0.2,y=z=0.5;x=0.8,y=z=0.5,演化结果如图2(c)所示。由仿真结果可知:当制造企业与学研机构处于中等意愿时,提高或降低政府的参与意愿可以改变制造企业与学研机构的最终策略选择。综上所述,当制造企业与学研机构是否参加的意愿不明确时,政府能对系统进行有效调控。 分别令ω1=0.3,ω2=0.3;ω1=0.6,ω2=0.6;ω1=0.9,ω2=0.9,此时对应的耦合协调程度分别为ω=0.55、ω=0.77和ω=0.95。通过提高制造企业与学研机构的创新能力及耦合协调程度,得出其对创新共生体行为的演化结果,如图3和图4所示。由此可得,创新能力在0.3到0.6之间、耦合协调程度在0.55到0.77之间均存在阙值。通过提高制造企业与学研机构的创新能力及耦合协调程度,将会加快其向“积极创新”策略演化的收敛速度。当制造企业与学研机构的创新能力及耦合协调程度提高至阙值以上时,制造企业与学研机构的选择将由“消极创新”向“积极创新”演化并最后稳定于“积极创新”。因此,制造企业与学研机构的创新能力与耦合协调程度对参与主体向“积极创新”策略演化具有正向作用,由此可验证推论2与推论3中的ω1、ω2和ω。 图4 耦合协调程度变化的演化结果 分别令γ=0.3,γ=0.6,γ=0.9,得出合作创新深度对创新共生体行为的演化结果,如图5所示。由仿真结果可知:在γ=0.3与γ=0.6之间存在阙值。随着合作创新深度的不断加深,由于需要的合作成本更高,系统向“积极创新”策略演化的速度减慢。当y增加至阙值以上时,系统将改变最终的演化策略。因此,制造企业与学研机构的合作创新深度对参与主体向“积极创新”策略演化具有负向作用,由此可验证推论2与推论3中的γ。 图5 合作创新深度变化的演化结果 分别令θ=0.4,θ=0.5,θ=0.6,得出投机收益分配系数对创新共生体行为的演化结果,如图6所示。由仿真结果可知:在θ=0.4与θ=0.5之间均存在阙值。随着投机收益分配系数的不断提高,系统向“积极创新”策略演化的速度减慢。当θ增加至阙值以上时,系统将改变最终的演化策略。因此,制造企业与学研机构的投机收益分配系数对参与主体向“积极创新”策略演化具有负向作用,由此可验证推论2与推论3中的θ。 图6 投机收益分配系数变化的演化结果 分别令A1=1,A2=1;A1=2,A2=2;A1=3,A2=3,得出政府的科学技术补贴对创新共生体行为的演化结果,如图7所示。由仿真结果可知:政府对制造企业与学研机构的科学技术补贴可以促使制造企业与学研机构双方的策略向“积极创新”方向演化,且政府补贴越高,系统中制造企业与学研机构向积极参与收敛的速度也越快,但政府向“积极监管”演化的速度略有减慢。由此可得,政府可以根据情况给予制造企业与学研机构适当的补贴,以促进双方积极参加创新共生,由此可验证推论1、推论2与推论3中的A1与A2。 分别令F=0,F=2,F=4,得出政府的罚金对创新共生体行为的演化结果,如图8所示。由仿真结果可知:当政府没有采取罚金时,制造企业与学研机构的演化策略稳定于“消极创新”策略,而随着政府罚金的提高,制造企业与学研机构“积极创新”的意愿更强。同时,政府罚金越高,政府、制造企业与学研机构向“积极创新”策略收敛的速度也越快,由此可验证推论1、推论2与推论3中的F。 图8 政府罚金变化的演化结果 制造业创新生态系统的创新共生行为是由政府、制造企业、学研机构进行动态博弈演化的结果。通过研究制造业创新生态系统内创新共生体的策略选择问题,以期促进中国制造业创新生态系统可持续发展。基于理论与仿真模拟分析,得出以下结论: 第一,制造业创新生态系统的创新共生行为具有{积极监管,积极创新,积极创新}和{积极监管,消极创新,消极创新}两种稳态,即“互利共生”与“偏利共生”两种稳定关系。但是,系统最终稳定于哪种共生关系是由制造企业与学研机构的创新能力、耦合协调程度、合作创新深度、投机收益分配系数、政府的科学技术补贴与罚金等多种关键因素共同影响的结果。 第二,初始意愿影响创新共生体的行为方式和最终选择。初始意愿在0.3与0.5之间存在阙值,当共生主体的初始意愿提高至阙值以上时,可以改变共生主体原有的共生关系,且提高三方的初始意愿可以提升演化策略的收敛速度。此外,当制造企业与学研机构的初始意愿不明确时,通过改变政府初始意愿的强弱程度可以改变制造企业与学研机构原有的共生关系,从而达到政府参与和调控的作用。当制造企业与学研机构的初始意愿比较明确时,改变政府初始意愿的强弱程度只能影响制造企业与学研机构的收敛速度,无法改变原有的共生关系。 第三,制造企业与学研机构的创新能力、耦合协调程度及政府的科学技术补贴与罚金对系统具有正向作用。随着上述关键影响因素的不断提高,系统向“互利共生”方向的收敛速度将有所提升。除此之外,创新能力在0.3到0.6之间、耦合协调程度在0.55到0.77之间、政府的科学技术补贴在1到2之间、罚金在0到2之间均存在阙值,使其保持至阙值以上,可以改变参与主体的最终策略,促进系统向“偏利共生”方向演化。因此,长期重视创新能力并保持高度的耦合协调程度,可以充分发挥制造企业与学研机构的优势和功能,实现技术共享和互动合作,加快企业的科技创新和研发进程。合理的奖惩机制可以有效遏制机会主义行为并且激励参与者积极参加创新共生。 第四,合作创新深度、投机收益分配系数对系统具有负向作用。随着上述关键影响因素的不断提高,系统向“偏利共生”方向的收敛速度将有所减慢。除此之外,合作创新深度在0.6到0.9之间、投机收益分配系数在0.4到0.5之间均存在阙值,使其保持至阙值以上,可以改变共生主体的最终策略,促进系统向“偏利共生”方向演化。因此,一味地设定较高的合作创新深度,会使研发成功率过低,不利于双方的合作。过度的投机收益会促使创新生态系统内的参与者更加关注短期收益和风险控制,可能会破坏创新生态系统的稳定性和可持续性。 根据以上结论,为鼓励制造业创新生态系统参与成员积极创新,提出以下建议: 第一,提高创新共生体的初始意愿。一方面,通过对制造业创新生态系统的共生理念加大宣传力度,使参与主体明确制造业创新生态系统共生的目标和意义,从而充分调动创新共生体的积极性、主动性和创造性。另一方面,提供一个促进创新、交流和分享的创造平台,让参与主体感受到协同共生的乐趣和意义,增强共生主体之间的认同感和信任水平。通过这些措施可以使参与主体更加重视制造业创新生态系统协同共生的发展,从而有效提升系统内共生主体积极创新的初始意愿群体比例。 第二,加强培养制造企业与学研机构的创新能力水平,提高双方耦合协调程度。制造企业与学研机构应努力提高科技水平,进行技术创新、产品创新、服务创新,推广创新文化,营造创新氛围,从而提升制造企业与学研机构的创新能力。系统内需要加强创新资源建设与人才资源建设,构建创新资源交换共享平台与人才沟通交流平台,通过沟通与交流使双方形成更加紧密的联系,避免造成信息不对等、合作紊乱等情况,从而有效提高制造企业与学研机构的耦合协调程度。 第三,构建完备的奖惩机制,发挥政府的导向作用。建立完备的成果共享、知识产权保护等政策法规,全面调动创新共生体的创新积极性。因此,政府可通过制定激励与惩罚措施,将科学技术补贴与罚金控制在阙值以上,使制造企业与学研机构始终保持“互利共生”的演化关系。与此同时,政府也要避免制造企业与学研机构过度依赖政府的科学技术补贴。 第四,制定公平的分配方案。收益分配方案是否合理,直接关系到创新生态系统中创新共生体积极创新的持久性与有效性。因此,在遵循“利益共享,风险共担”原则的基础上,建立有效的监督和评估机制,综合考虑创新共生体的创新资源投入、努力水平、贡献程度等因素,对各方的贡献进行实际或者定量化的评估,通过协商,制定一种合理的收益分配方案。同时,系统内共生主体应该建立完善的创新资源交换和筛选机制,以此保障自身在合作创新过程中的合法利益。通过上述措施可以尽量避免“投机收益”或“搭便车”的行为,尽量保持“互利共生”的关系。四、数值仿真

(一)初始意愿对创新共生体行为的影响
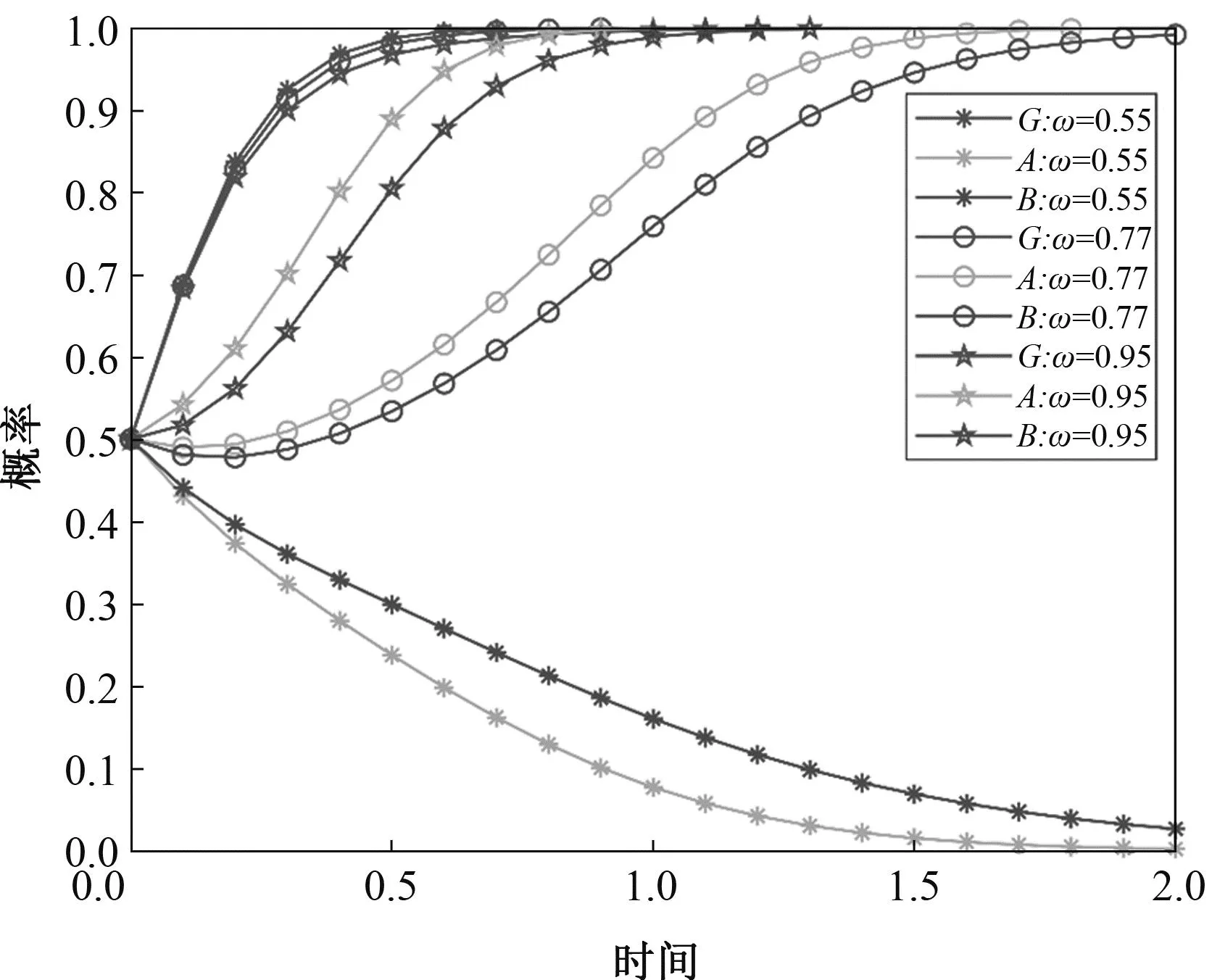
(二)创新能力与耦合协调程度对创新共生体行为的影响
(三)合作创新深度与投机收益分配系数对创新共生体行为的影响

(四)政府奖惩对创新共生体行为的演化影响

五、结论与建议
(一)结论
(二)建议
猜你喜欢
科学与社会(2023年4期)2024-01-11
厦门大学学报(哲学社会科学版)(2022年3期)2022-10-14
宝藏(2021年7期)2021-08-28
现代畜牧科技(2021年6期)2021-07-16
纺织服装周刊(2019年31期)2019-09-27
华人时刊·校长(2018年6期)2018-05-14
语文知识(2015年11期)2015-02-28
海峡姐妹(2015年3期)2015-02-27
中国卫生(2014年12期)2014-11-12
教育与职业(2014年1期)2014-01-14