
水面智能保洁机器人的研究与设计
2024-01-26 02:48:44石银安陈启春陈智文于漪丁吕林活
科技和产业 2023年24期
石银安, 陈启春, 袁 宽, 李 强, 龚 慧, 陈智文, 于漪丁, 吕林活
(东方水利智能科技股份有限公司, 四川 德阳 618000)
我国地域宽广,水域辽阔,随着国家对河长制、湖长制等相关政策的发布与施行,水环境保护日益变得更加重要。中小型水库、湖泊、城市河道及公园、景区、特色建筑、生活小区等场所的景观水面,因气候变换及人类活动,水面常会产生树木枝叶、水草、浮萍及各种生活垃圾,需要开展常态化的清污保洁工作才能保证水面的清洁卫生,但这些水域的水面漂浮污物存在种类繁多、形状各异、位置分散、大小不一以及形成时间、位置不确定等情况,给清污保洁工作带来较大的难度。经过广泛调研,发现该类水域漂浮污物清理属于脏、难、险“3D”(dirty、difficult、dangerous)工作场景,保洁工作人员存在年龄大、文化低、收入少等突出问题,年轻人越来越不愿从事该类行业工作,随着国家人口数量红利的消失,将会越来越难找到合适的清污作业人员[1-3]。为此,研究与设计系列化具备适应能力强、智能化程度高的水面智能保洁机器人是非常必要的。水面智能保洁机器人可实现功能如图1所示。
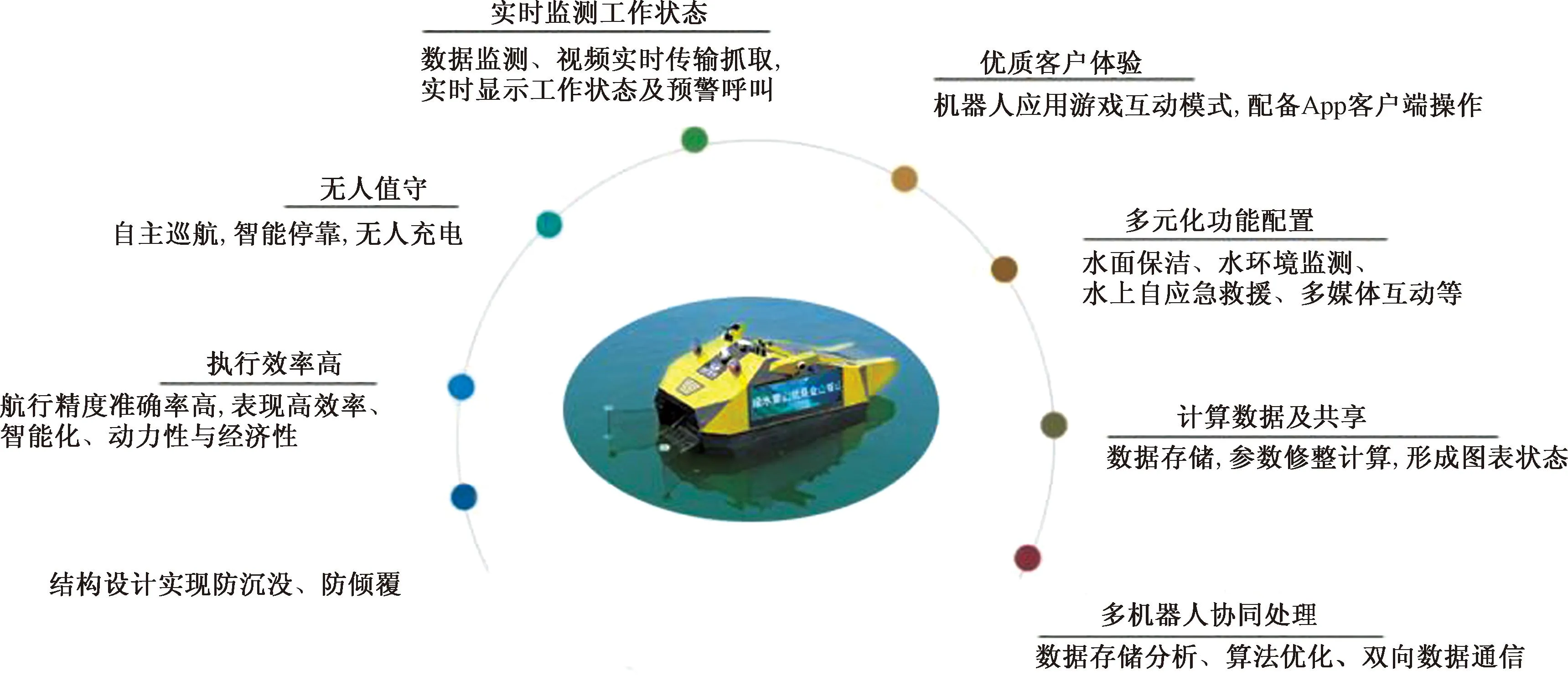
图1 水面智能保洁机器人可实现功能
目前,国内外在水面漂浮污物清理保洁方面已有一些清洁机器设备、无人船出现,但存在船体小、漂浮污物收集量小、漂浮污物不能太大、续航时间有限的问题[4-5]。美国巴尔的摩港(Baltimore Harbor)的“垃圾轮先生”(Mr.Trash Wheel)是一种固定式的自动清洁装置,清洁漂浮污物的效率高[6]。但是存在一定的缺陷,如船体太小、动力不足,作业时间短等,特别是智能化程度较低,基于嵌入式系统,没有通用计算机平台,无法运行人工智能和复杂智能感知系统。该类装置未搭载复杂障碍探测系统和智能识别系统,无法在复杂河道中自主巡航和避障,属于无人机械船系列。本系列化研究与设计的水面智能保洁机器人具有实时监测工作状态、航行精度高、自主巡航、智能停靠、无人充电、线下景观与云端数据共享的特点,适用于城市河道、小型河流、人工湖及公园、景区、特色建筑、生活小区等场所的水面保洁。目前,已推出小型和中型两种规格的水面智能保洁机器人,“河宝”DF-H4s型水面智能保洁机器人(图2)和“河宝”DF-H4m型水面智能保洁机器人(图3)。

图2 “河宝”DF-H4s型水面智能保洁机器人

图3 “河宝”DF-H4m型水面智能保洁机器人
1 机器人本体设计
1.1 浮体设计
水面智能保洁机器人的浮体采用双体结构(图4),其主要优点为: ①双体结构稳定性好;②双体结构宽度相对较大,两船体之间的空间开阔,有利于安装漂浮污物收集舱、辅助漂浮污物收集聚料导漂板、控制系统等零部件;③双体结构两浮体内填充防水发泡材料,既可满足浮力要求,又可防止智能保洁机器人沉没,使船体更加安全;④双体结构浮体分为左右两个,横摇时回复力矩是同样排水量的单体结构的若干倍,使船体更加稳定。在进行水面漂浮污物清理时,稳定性非常重要,双体结构可以在承受较大风浪的前提下仍能稳定工作;⑤浮体框架及面板采用了铝合金、碳纤维等材料制作而成,具有强度高、质量轻、防碰撞等性能。
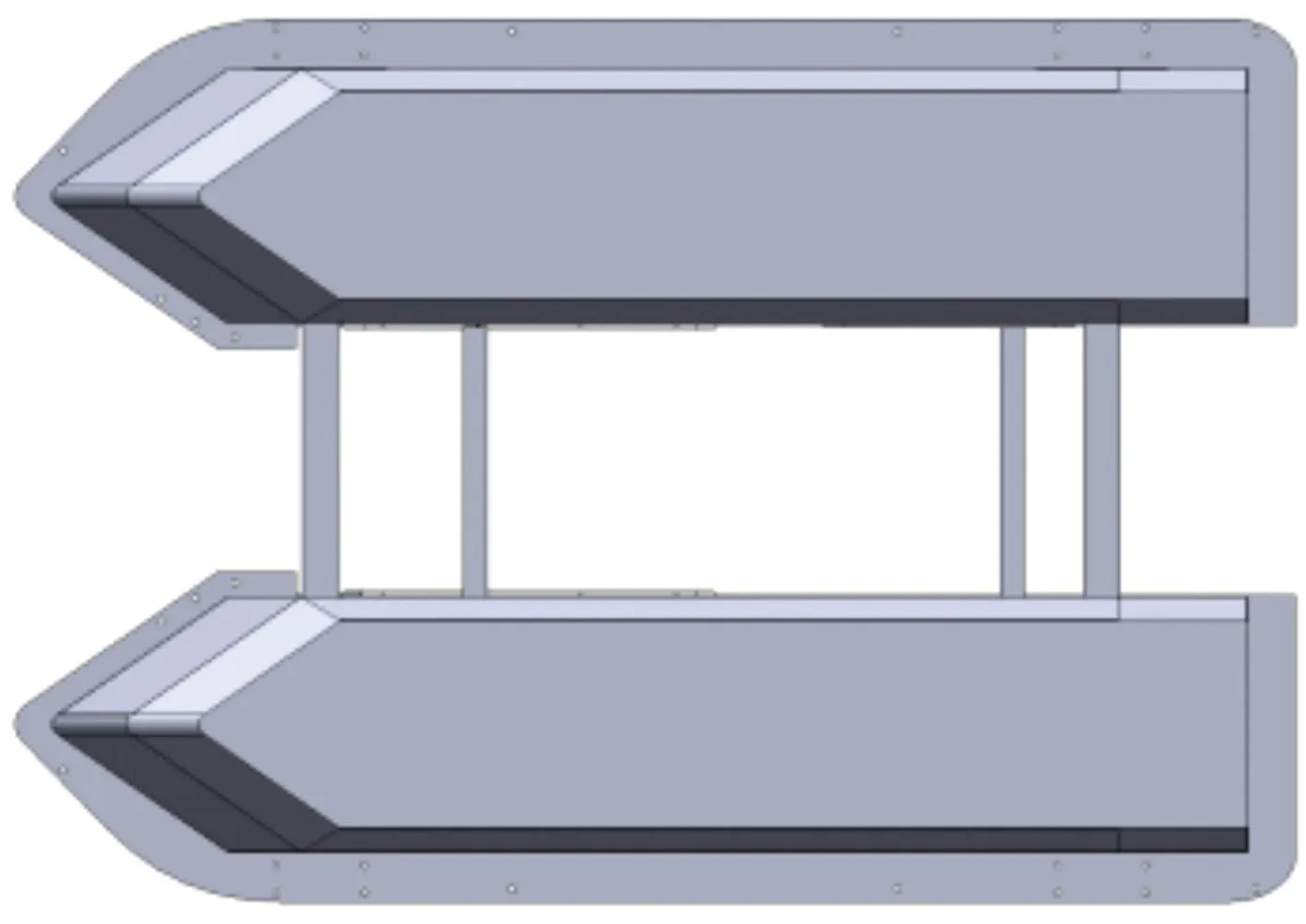
图4 双体结构示意图
1.2 漂浮污物收集舱设计
漂浮污物进入漂浮污物收集舱以后,保洁机器人的重心会随着漂浮污物的增加发生一定变化,将对机器人行进过程中的灵活性、行进速度及漂浮污物清理效率造成影响,因此漂浮污物收集舱选用可滤水结构呈长方体设计结构。整个漂浮污物收集舱设置在双侧对称浮体结构中间框架内,收集舱整体框架设计采用铝合金材料进行构建,周围和底部覆盖链板及滤网。在实际作业过程中,打捞网链收集上来的漂浮污物进入收集舱内,堆积固定时间或到达一定高度后,收集舱输送网链往后运动一定距离,逐渐到达机器人收集舱尾端进行漂浮污物储存,待收集舱满舱后进行卸料提醒,机器人满载返航到卸料区进行卸料。
1.3 动力装置设计
以前的水面漂浮污物清理装置主要是采用螺旋桨或者叶轮来作为动力装置。其中阻碍螺旋桨虽然具有较强的动力,但灵活性较差,并且在实际作业过程中极易出现水草缠绕情况;叶轮虽然动力较差,但灵活性较强,这些不易出现水草缠绕等问题。经综合研究分析,选用螺旋桨作为动力装置的主体。为提高保洁机器人的动力和灵活性,设计中采用两对螺旋桨,并将螺旋桨设置在浮体两侧,每侧设置2个。浮体内部设置有4个直流电动机作为驱动装置,分别为4个螺旋桨提供动力。
1.4 打捞机构设计
漂浮污物打捞机构采用链传动方式进行打捞及漂浮污物输送,主体由铝合金及塑料结构构建,打捞链板采用不锈钢网链设计,实现水面漂浮污物的大部分水分过滤;链板间相隔固定长度设计有一定高度的挡板,进行辅助较大漂浮污物打捞上升过程中的拦截不滑落,挡板采用疏密孔排布设计;打捞机构的上部末端直接与大扭矩防水电机及减速机相连,电机直接固定在浮体的铝合金主体框架上,利于打捞机构设备维护和材料更换。
1.5 控制舱设计
保洁机器人的控制舱设置在浮体两侧主体框架内部,浮体为焊接密封,开盖采用橡胶密封,为了增强控制舱的防水性能,将控制舱设计为密封结构舱室。当机器人行进和工作过程中发生碰撞漏水异常时,渗水将会积在浮体底部并采用自动泵排出,而非进入到控制舱,避免了内部电器和控制系统受损。浮体内部电源采用容量为320 Ah的可充电式电池[7];控制舱内部设有控制系统和电源管理系统,其中控制系统主要包括驱动控制器、执行单元控制器、通信模块和信息采集模块。
1.6 控制系统设计
机器人由硬件模块、控制软件及人机交互设计结合,实现系统控制及联合调试作业。硬件模块中主控、传感及功能子系统完成对信息传输、处理、认知及执行等功能;控制软件完成测试机器人的数据采集、通信协议、逻辑控制、故障诊断等功能;人机交互完成检测作业流程、设备运行状态、测试机器人数据读取以及声光报警等功能。
由于水面漂浮污物存在种类繁多、形状各异、位置分散、大小不一以及形成时间、位置不确定等情况,可采用无线遥控的方式对机器人进行控制,可以根据实际情况控制机器人的方向、速度及其他动作,直至机器人完成整个工作流程。设计时,将控制者所使用的遥控器作为主控制器,机器人所携带的信号接收器作为从控制器,从控制器接收到主控制信号后控制机器人的各种动作,达到远程控制的效果。
2 主要智能化功能
2.1 导航传感器系统
导航传感器系统作为无人系统的感知单元,承担着无人系统状态参量测量与估计的重任。对于水面智能保洁机器人而言,姿态、速度、加速度、位置及视觉等传感器的零偏误差与补偿系数均需要测量或估计。这些众多参量之中只有极少一部分能够被直接或间接测量,大多数参数需要采用多个传感器组合的方式,结合最优估计算法进行估计,最终才能够得到理想的状态参量。导航传感系统是由多个传感器组合的传感系统,主要由惯性测量单元(inertial measurement unit,IMU)、磁力计、气压计、GNSS(global navigation satellite system)、激光雷达、毫米波雷达、双目相机等传感器组成。多个传感器测量维度不同,根据传感器组合方式不同,导航传感系统需要使用的算法不同,常采用互补滤波和卡尔曼滤波算法。
1)互补滤波算法。互补滤波将两个表征同一个状态信息的观测量分别经过低通/高通滤波器后,将其进行加权,从而达到优势互补的效果[8]。互补滤波算法过程如图5所示。
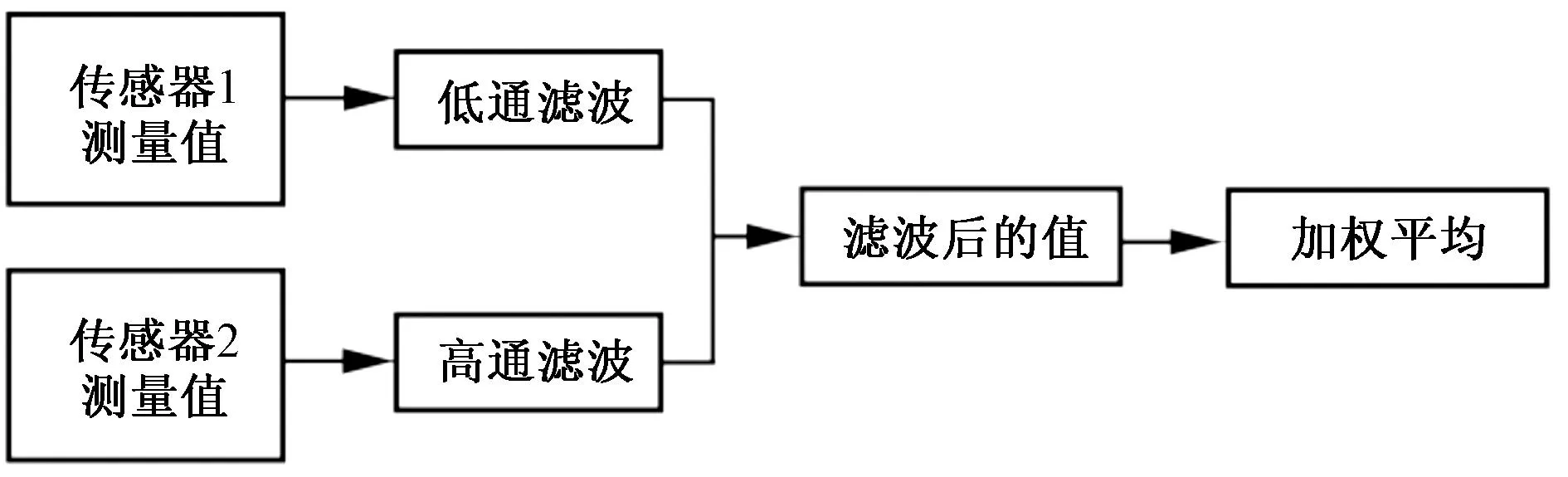
图5 互补滤波算法过程
2)卡尔曼滤波算法。对于一个待估计的系统状态,这一刻系统的状态(最优估计)是这一刻的预测值和这一刻的测量值的加权平均,当得到最优估计之后,再将这一刻的最优估计和预测值进行对比,若相差比较小,则说明预测值比较准确,下次计算就加大预测值的权值,否则说明预测值不准确,下次计算就加大测量值的权值,循环以上过程,进行动态调整得到最优系统状态[9]。卡尔曼滤波算法原理过程如图6所示。
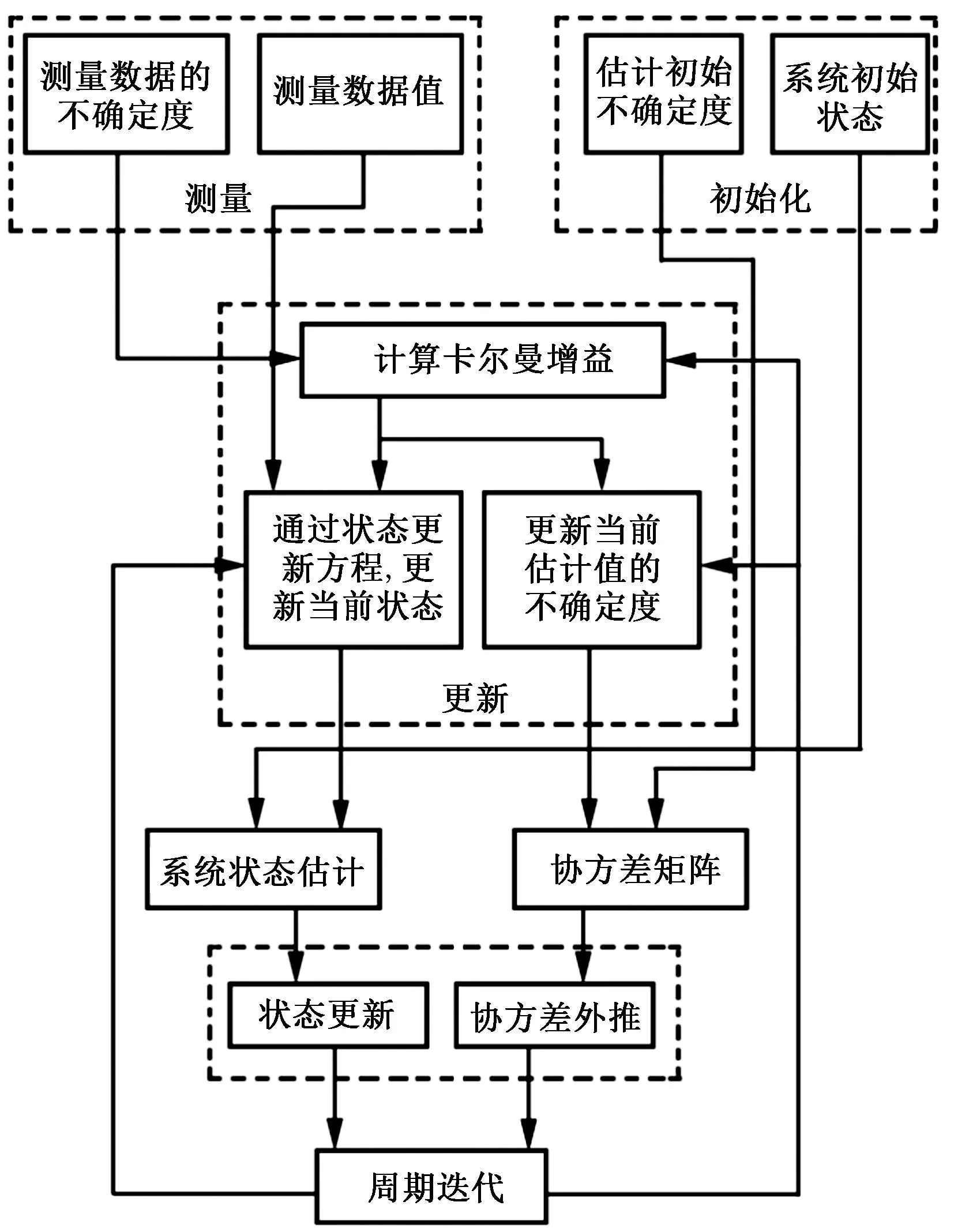
图6 卡尔曼滤波算法过程
2.2 智能控制系统
智能控制系统设置在船体中央位置,主要包括Intel NUC(next unit of computing)控制板、电机控制板、电源转换板等部件,具备自主识别、探测、搜寻水面物体,对物体精准识别、定位与追踪,自主路径规划及导航,自主避障,低电量自动返航,满载智能返程,监控报警等功能,实现了水面漂浮污物打捞作业的无人驾驶及智能控制操作。在此就图像自动识别、路径规划导航、智能避障等功能进行介绍。此外,Intel NUC控制板上集成有Ubuntu系统和ROS(robot operating system)系统,主要用于控制智能机器人的各种动作[10-11]。
2.2.1 图像自动识别[12-13]
本文完成了图片数据集、打标、模型训练、模型测试等一系列工作,实现了水面智能保洁机器人的深度学习目标检测单元模块研制。采用最新目标检测深度学习模型Yolo-v4,并把模型最终移植到前端设备NVIDIA Jetson /AGX Xavier上进行检测。在研究与设计过程中,演示的检测目标为圆柱形白色矿泉水瓶,摄像机为海康威视网络摄像机,有检测视频存储和目标位置存储,并可实时发送给计算机进行判断处理,演示结果准确率极高,FPS(frames per second)也达到了机器人的运算要求。视觉识别技术在垃圾漂浮物识别中的应用如图7所示。
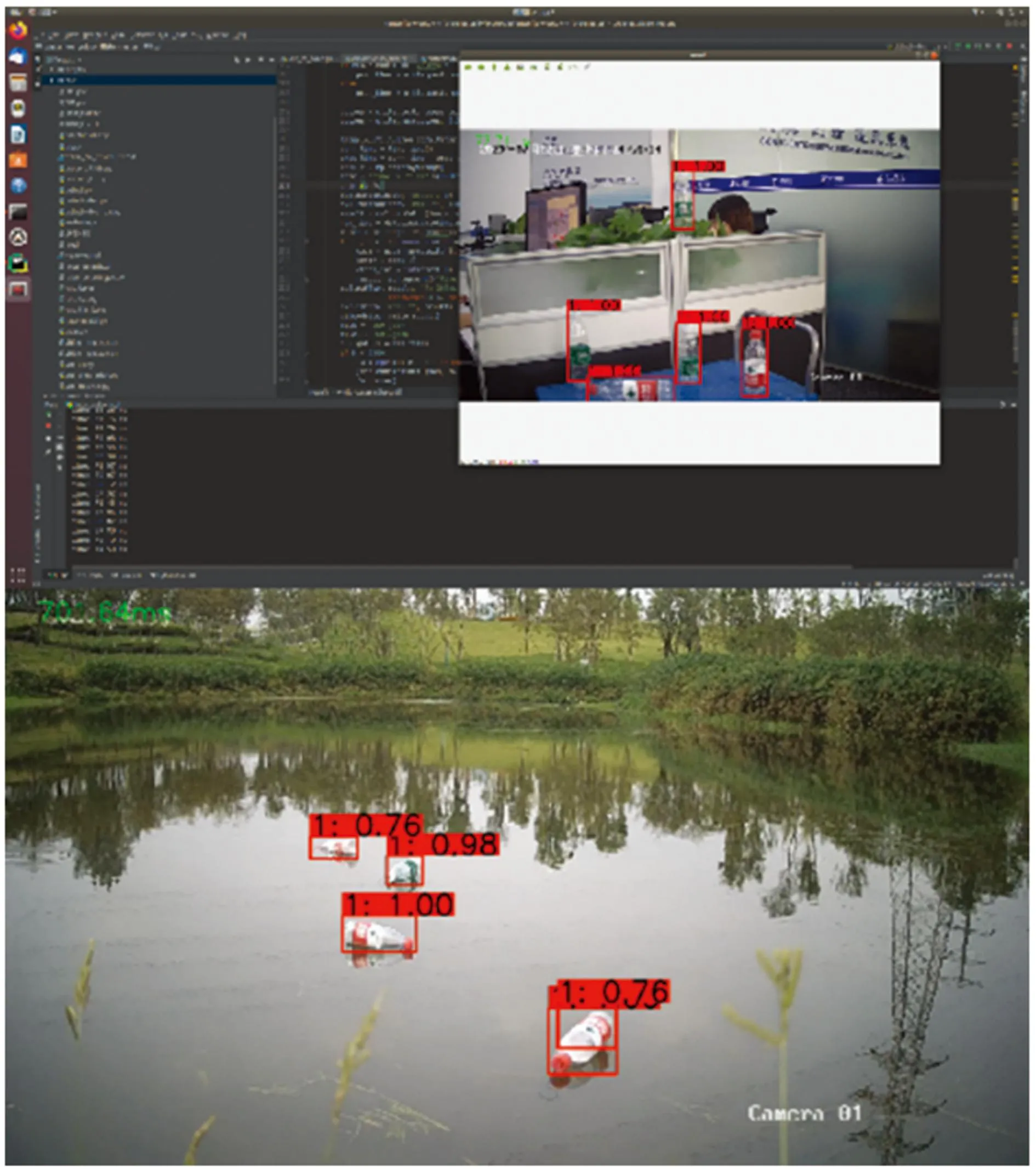
图7 视觉识别技术在垃圾漂浮物识别中的应用
2.2.2 路径规划导航[14-15]
采用卫星定位+自主导航算法来实现规划路径实时导航。卫星定位采用联合定位提高定位精准度,实时反馈保洁机器人的地理位置信息。自主导航算法获取规划路线及保洁机器人的实时位置,对机器人的航行方向、速度进行合理控制,进而达到本设计的路径规划导航目标。全局路径规划采用A*最优路径算法,计算选取costmap上的最短路径。系统流程如图8所示,实现过程流程如图9所示。
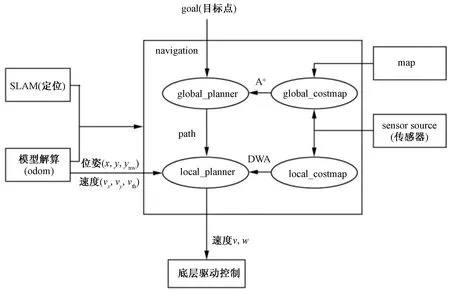
图8 系统流程
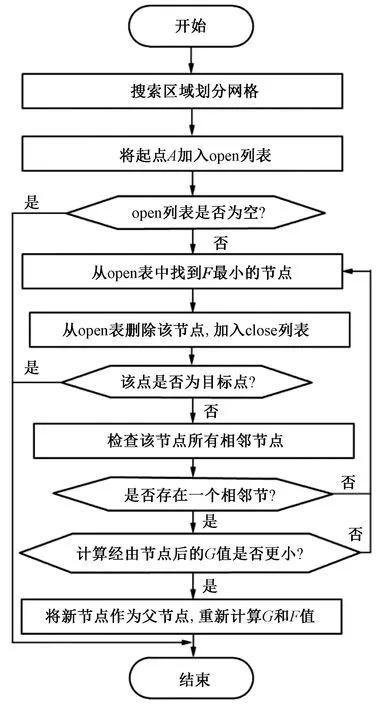
图9 A*最优路径算法实现过程流程
2.2.3 本地实时规划(local planner)--智能避障功能
采用动态窗口算法(dynamic window approach,DWA)计算机器人每个周期内应行驶的速度和角度(dx,dy,dtheta velocities),通过算法搜索到达目标的多条路径,利用设定评价标准(是否会撞击障碍物、所需时间、代价函数等)选取最优路径,并计算所需实时速度和角度[16-17]。DWA算法实现流程如图10所示。
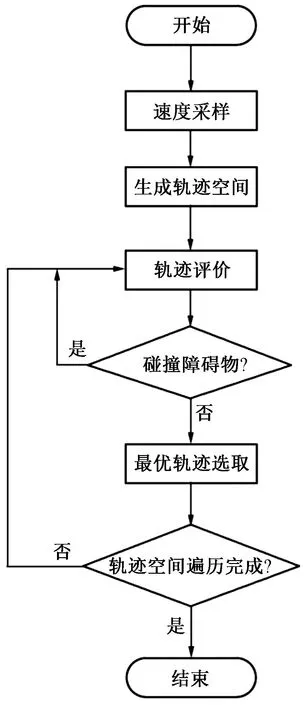
图10 DWA算法实现流程
2.3 动力系统
机器人顶部设置有一块12 V/20 W单晶硅太阳能电池板,该电池板可以保证机器人在白天情况下实现不充电全天候的通信数据运转。有48 V/2.6 kW电动推进器4个,48 V/12 kW·h动力型蓄电池,实现航速最高达30 km/h(工作航速14 km/h,最高航速30 km/h),工作航速续航6 h,最高航速续航2.5 h,测量偏航小于0.5 m。采用螺旋桨推进的电力推进方式,舵桨一体化能够提供任何方向的推力,极大地提高了机器人的操纵性能。电力推进系统推进电机转子轴和螺旋桨轴位于同一直线,形成一个独立的推进模块,推进模块可在水平面内实现360°全回转,可省去舵机系统及侧推装置,集推进和操纵功能于一体,既能操纵机器人的方向,又能获得该航向上的推力,且可实现机器人的动力定位[18]。
2.4 通信系统
机器人内部搭载有4G/5G路由器,使机器人可以与区域局域网或者互联网连接,可以通过网络实现机器人远程控制和监控。
2.5 智能打捞收集系统
针对不同漂浮打捞速度进行设计,根据打捞链板承载载荷及体积,调整收集打捞机构的运行速度,以达到不同环境下高效执行收集;存储装置根据漂浮污物的种类、质量及体积来选取适合的速度进行使用,使其在有限空间实现最大储存量,方便装卸;调整合适的驱动动力输出,既提升续航里程,又能满足高效执行,使其满足动力性、经济性、稳定性。
2.6 智能充电功能
为提高机器人的利用效率,设计选用了六自由度蛇形智能充电器。该柔性充电臂装置包括固定式电源基座(发射端)、蛇形充电臂(接电端)和充电器接头(耦合器),能够实现空间六自由度运动,自动查找充电口,精确对中,快速锁紧和解锁,实现高效快速充电功能[19-21]。核心部件是蛇形充电臂(图11)。
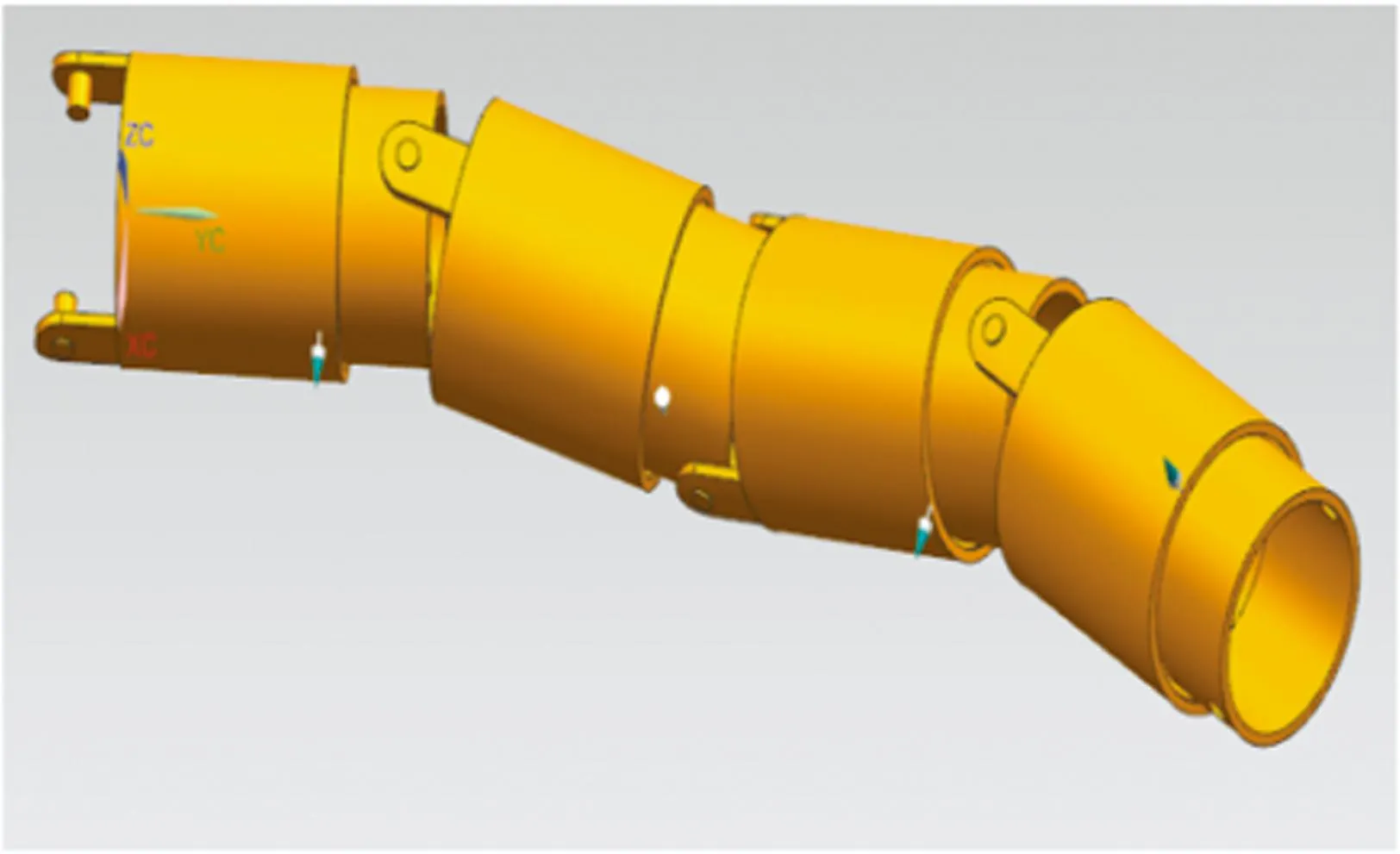
图11 蛇形充电臂
3 样机测试
水面智能保洁机器人实验样机如图2和图3所示,样机性能测试参数如表1所示,已在四川省德阳市旌湖湖面智能保洁中有所应用。2023年9月5日,在由四川省经济和信息化厅、财政厅指导,德阳市经济和信息化局、德阳市财政局、德阳经济技术开发区管理管委会主办,德阳市经济技术开发区工业和信息化局承办的第八届“创客中国·创业天府”四川省中小企业创新创业大赛德阳区域预选赛暨经开区2023年创新创业大赛中,参赛的《“河宝”H4m水面保洁机器人--水域漂浮污物智能化清理小能手》荣获企业组二等奖,获奖现场照片如图12所示。
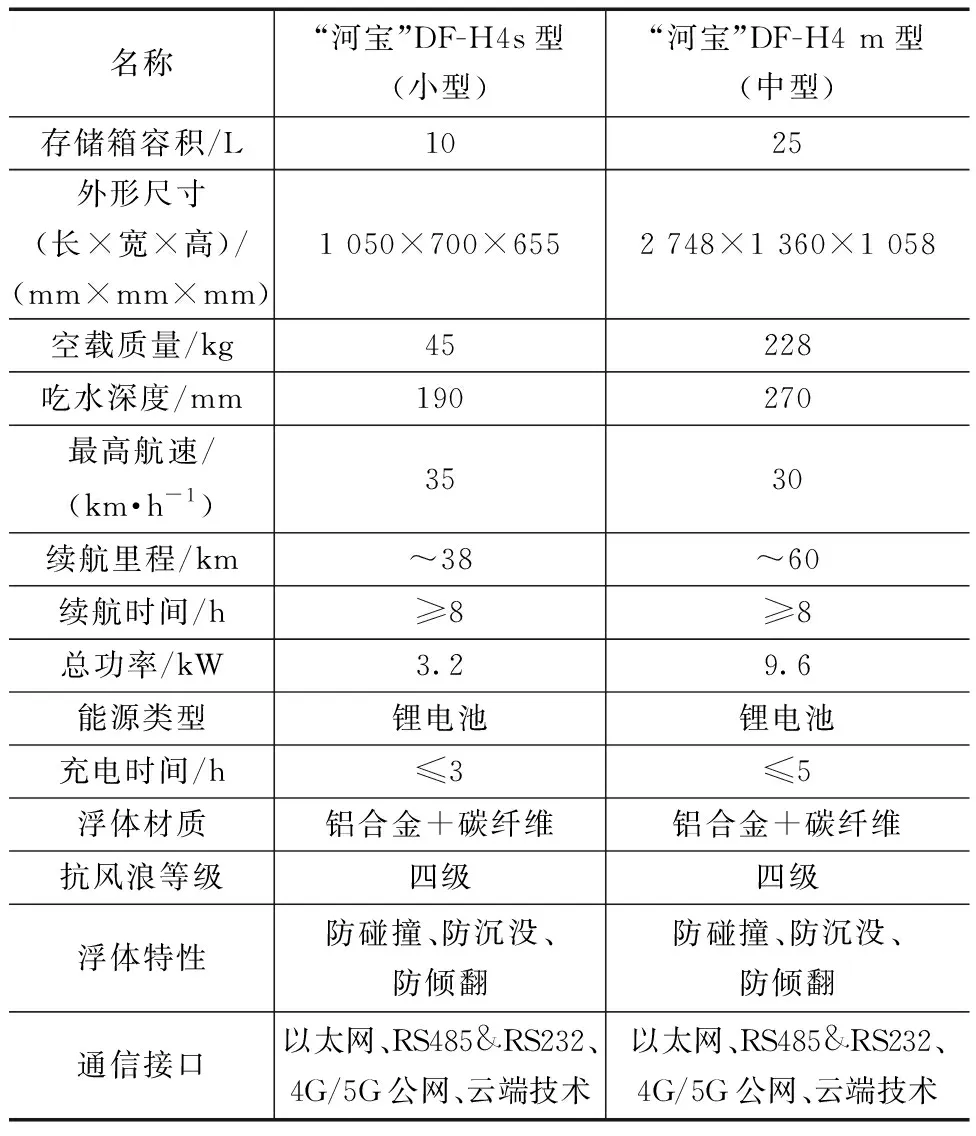
表1 水面智能保洁机器人样机性能测试参数

图12 水面保洁机器人获奖现场
4 结论
根据设计方案成功研制了小型和中型两种规格的水面智能保洁机器人,对样机各项性能进行了测试,均满足设计要求。得出结论如下。
1)水面智能保洁机器人不仅可以实现水面漂浮污物的智能化清理收集,而且能够对水环境进行实时监测。
2)在运行过程中对于人力、外界能源的需求较低,可以有效节约水面保洁综合成本,是实现机器取代人工应用场景的典型,值得在各种水域环境智能化治理中进行推广应用。
猜你喜欢
人民长江(2023年6期)2023-07-25 12:24:14
地质装备(2021年2期)2021-04-23 07:33:52
舰船科学技术(2021年12期)2021-03-29 01:28:12
科技与创新(2021年4期)2021-03-24 08:06:52
课外生活(小学1-3年级)(2020年2期)2020-03-09 03:24:26
疯狂英语·新读写(2018年3期)2018-11-29 22:37:11
水利与建筑工程学报(2018年4期)2018-08-21 07:47:54
摄影之友(影像视觉)(2017年8期)2017-11-27 02:08:34
能源(2016年3期)2016-12-01 05:11:02
汽车实用技术(2015年11期)2015-01-03 07:43:13
