
基于遥感+GIS的山火检测及火势蔓延监控平台实现*
2024-01-18 05:45刘宇舜张思航朱理宏张振威徐英辉
灾害学 2024年1期
杨 知,刘宇舜,李 闯,张思航,朱理宏,刘 彬,刘 畅,张振威,徐英辉
(1.中国电力科学研究院有限公司 北京 100010;2.国网安徽省电力有限公司电力科学研究院 安徽 合肥 230601;3.安徽送变电工程有限公司 安徽 合肥 230601)
山林火灾因其突发性强、破坏性大且难以预测的特点,导致了大量生态资源与生命财产损失,给防灾减灾工作带来了极大的压力。因此,研究如何有效监测山林火灾,并对火势蔓延行为准确预测,进而降低山林火灾的损失,成为防灾减灾工作重点[1-2]。卫星遥感因其多尺度、多光谱、多时相等对地观测特点,目前已经成为山林火灾检测的主要技术手段,也是过火迹地特征、林火数据库等的重要信息源[3-4]。贾道祥[5]提出一种基于地理表示图像的烟火定位与林火三维可视化模拟方法,利用单视点和多视点地理标记图像实现烟火定位,并利用多视点图像与DEM进行耦合,实现火场三维可视化表达。邓曌[6]提出一种基于三维Otsu法的林火热点监测方法,对比已有的多种林火监测方法,选取上下文法监测算法配合三维Otsu法,采用自适应动态阈值,可实现精度更高、速度更快的长时序森林火灾检测。高赫蔚[7]基于森林火灾的时间序列特征,结合风速、风向、坡度、坡向和植被覆盖率等数据,利用FUN-LSTM神经网络对林火蔓延进行预测,结果具有很高的准确度;张兆鹏等[8]利用火灾对植被覆盖度影响,并对不同程度或范围过火区的植被覆盖度恢复情况进行分析,阐述了频发森林火灾对森林自然环境的影响巨大;唐丽玉等[9]集成FARSITE林火模拟和三维可视化方法,研发了林火蔓延可视化系统,提供林火蔓延过程和估算过火面积等功能。
如何快速准确地检测火点,并根据火点检测结果实时逼真地模拟火势动态发展趋势是当前技术应用的难题。目前,已有的山火检测与火势蔓延技术融合性较差,很少有研究结合时效性高、实用性强的气象卫星火点检测结果作为火势蔓延的起火点,且火势蔓延平台仍停留在较为粗糙的可视化阶段,无法满足相关生产应用部门的实用性需求。因此,研究开发一套常用的气象卫星山火检测及实时的三维仿真的火势蔓延监控平台能有效满足山火防治工作实用性需求,提高山火防治业务水平。本研究以火点检测、地表火势蔓延和山火参数可视化监测模块为主体,采用自适应阈值法和深度学习方法实现基于卫星遥感的山火检测;利用Rothermel蔓延模型模拟山火的行进轨迹与发展趋势;采用改进的粒子系统方法的计算机图像学原理进行多模块整合,实现交互浏览等功能。在新建的平台上,各级单位可以利用山火检测和火势蔓延监控平台获取火点位置、过火面积和发展趋势等信息,可直观了解过火区的发展状态,有利于制定出“有的放矢”的治火策略。同时以大同市森林火灾进行实例验证,充分验证了该平台在山火检测和火势蔓延应用中的可靠性。
1 系统方案设计
1.1 系统总体方案
本平台基于关系型数据库MySQL存储多源数据信息,后端采用J2EE架构进行数据接口的设计开发,前端采用基于JavaScript语言的WebGIS技术进行应用层开发,旨在实现基于遥感+GIS的山火检测及火势蔓延监控,主要包括三个功能模块(图1):火点检测模块、地表火蔓延模拟模块、山火参数可视化监测模块。首先,利用卫星遥感数据,采用自适应阈值法或深度学习方法,对地表高温异常点进行实时识别和定位,并提供火点位置、强度等信息。其次,利用Rothermel蔓延模型,根据林地燃料特性、气象条件、地形因素等输入参数,计算火焰传播速度、方向、强度等输出参数,并通过数值求解方法得到火场动态分布图。最终,利用计算机图形学原理,采用改进的粒子系统方法,根据火场动态分布图和视角设置,生成逼真的三维林火场景,并实现交互式浏览和漫游功能。
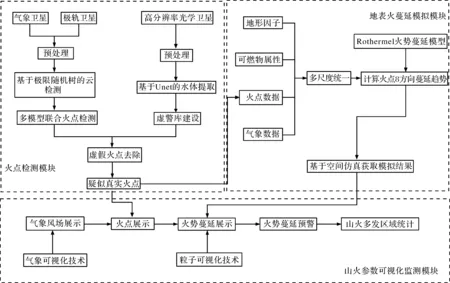
图1 系统总体设计导图
1.2 系统功能设计
1.2.1 火点检测模块
该模块利用卫星遥感数据,采用自适应阈值法或深度学习方法 ,对地表高温异常点进行实时识别和定位。该模块可以提供火点位置、面积、强度等信息,为火灾预警和扑救提供依据,其主要功能包括:
1)数据获取。从日本气象厅和地理空间数据云平台获取近实时的静止气象卫星、极轨气象卫星和高分辨率光学卫星数据。
2)数据预处理。对影像数据进行大气校正、几何校正、辐射校正等操作,以消除噪声和误差,并提取所需的光谱通道。
3)火点识别。采用先进机器学习算法,对影像数据进行特征提取和分类识别,实现火点像素的快速精准检测。
4)火点定位。根据识别出来的高温异常像素,在地理信息系统(GIS)中确定其经纬度位置,并与其他空间数据(如行政区划图层)进行叠加分析。
5)火点属性统计。根据高温异常像素在影像中所占比例或面积以及亮度温度大小等指标计算其相应属性(如面积、强度),并将其作为输出结果。
1.2.2 地表火蔓延模拟模块
该模块利用Rothermel蔓延模型,根据林地燃料特性、气象条件、地形因素等输入参数,计算火焰传播速度、方向、强度等输出参数,并通过数值求解方法得到火场动态分布图。该模块可以预测火灾发展趋势和影响范围,为扑救策略制定提供参考,其主要功能包括:
1)数据获取。从各种数据源(如遥感影像、气象站点、数字高程模型等)获取所需的输入参数(如林地燃料类型、含水量、风速风向、坡度坡向等)。
2)数据预处理。对输入参数进行空间插值或转换,以保证其与火场动态分布图的空间分辨率和范围一致,并进行必要的单位转换或归一化处理。
3)火蔓延模拟。采用Rothermel蔓延模型,根据输入参数计算火焰传播速度、方向、强度等输出参数。Rothermel蔓延模型是基于物理原理和实验数据建立的经验公式,可以描述不同燃料类型下的火焰行为。
4)火场动态分布图。火场动态分布图是以时间为维度,以空间网格为单元,表示每个网格单元在每个时间步长内是否被点燃或灭火的二值状态。基于数值求解方法将Rothermel蔓延模型离散化,并结合初始火点位置和不可燃区域等要素,得到火场动态分布图,通过修改预测时间段与计算频次,生成火势蔓延结果。
1.2.3 山火参数可视化监测模块
该模块利用计算机图形学原理,采用改进的粒子系统方法 ,根据火场动态分布图和视角设置,生成逼真的三维林火场景,并实现交互式浏览和漫游功能。具体而言,其主要功能包括:
1)粒子可视化。根据火场分布图,确定每个时间步长下的起火点位置和数量,并在每个起火点处生成一定数量的粒子。根据物理规律和外部影响(如风力、重力等),更新每个粒子的属性。根据每个粒子的属性,绘制并显示出相应的图像,实现粒子模拟可视化。
2)气象可视化。后台接入实时气象数据,基于代码转换生成可视化风场,并可通过时间轴拖动查看不同时间段风场变化情况。
3)山火蔓延预警。判断火势蔓延预测结果,相应给出预警风险等级判定并采用消息通知和地图可视化的形式进行发布。
4)山火多发区域图绘制。根据采集、接收到原始火点数据和GIS信息、地形信息的叠加结果,绘制出山火多发区域的模拟图,进行系统经验积累,通常以热力图的形式来呈现不同位置的火灾依法情况。
2 关键技术
2.1 多模型联合的火点检测技术
本系统采用的火点检测技术主要包括云检测、水域掩膜、火点检测、虚假火点去除四部分。
2.1.1 基于极端随机树的云检测
极端随机树是一种组合分类器,是对随机森林算法的改进,通过将全部训练样本应用到每一棵回归树上,能够增强其泛化性能,具有高精度、抗噪声、防止过拟合等优点。在算法构建过程中,综合考虑原始光谱、亮温差、地理位置、角度等多要素特征,构建样本数据集,基于网格化寻优确定最佳参数,实现云像元的识别提取。本研究在云南地区Himawari-8卫星的26万个像元上进行训练和十折交叉验证(云像元占比58%,晴空像元占比42%),其精度与其他方法对比见表1。

表1 不同云提取机器学习模型验证精度对比
2.1.2 基于Unet网络的水域提取
水体作为火灾隔离带不具备发生火灾的可能性,但其光滑的表面容易在太阳辐射场景中产生耀斑,带来火点误检,因此必须排除水体对山火检测的影响。Unet网络是一种基于全卷积网络的语义分割模型,主要由编码器-解码器结构构成,能够保留较多的位置信息和上下文信息,将预处理后的Landsat中分辨率卫星数据作为输入数据,基于人工优化后的水体掩膜样本,构建水域提取网络,完成卫星影像中水体像元的标记和过滤。
2.1.3 多模型联合的火点检测
利用气象卫星的中红外和热红外通道,可以实现火点的监测,本系统中部署了空间上下文算法及CNN网络,以实现火点的精准识别。首先,利用空间上下文算法计算每个像元与邻域所有像元的温度平均值和标准差,根据图像的类间方差自动计算最佳分割阈值,形成潜在火点的初步识别结果;随后,将空间上下文信息、原始光谱、亮温差、地形信息、观测角度等作为输入变量传入CNN网络,进行火点的精确提取。本研究依据云南省15 183个火点样本(火点1 424个、非火点13 780个)进行模型的构建与验证,结果显示火点检测精度达89.4%,总漏分率9.6%,总误分率1.0%。
2.1.4 虚假火点去除
虚假火点主要由固定高温热源和耀斑引起,其中固定高温热源指由工业生产、城市建设等人为活动造成的持续性高温热源,如钢铁厂、发电厂、火车站等。这些热源会在卫星监测中被误判为火点,造成虚警。对于这部分虚假警报,一方面通过土地利用数据筛除部分工厂区域,另一方面通过DeeplabV3+语义分割网络对光伏板、大棚等进行提取,进而实现虚警库的构建。
而对于耀斑则主要是用镜面反射向量角度进行判断,其定义如下:
cosθr=(cos(θV)cos(θs)-sin(θv)sin(θs)cos(ψ))
(1)
式中:θr为地球表面到卫星的向量与镜面反射方向之间的角度,θv和θs分别为卫星天顶角和太阳天顶角,ψ为相对方位角,通过卫星方位角和太阳方位角计算获取。然后通过以下条件进行判别:
θr<30;
(2)
albedo03>0.3;
(3)
albedo04>0.3。
(4)
如果同时满足上式,火点像元被确认为太阳耀斑影响,对其进行去除。
2.2 基于Rothermel模型的地表火蔓延模拟
2.2.1 Rothermel模型原理
Rothermel模型是一种基于物理学原理的火势蔓延模型,它的基本思想是林火的蔓延过程实际上是火焰前方未燃可燃物被连续点燃的过程,其根据可燃物的性质、风速、坡度等因素计算出火线强度、火焰长度、高度、角度等参数,进而预测林火的蔓延速度和方向,其基本公式如下:
(5)
式中:IR为反应强度(kJ/(m2·min));ζ为蔓延率;ΦW、ΦS分别为风速和坡度修正系数;Pb为地表可燃物密度(kg/m3);ε为可燃物有效加热系数;Qig为引燃单位质量可燃物需要的热量。
2.2.2 多要素获取及尺度统一
Rothermel模型的构建要素主要包括地形、坡度、坡向、林冠覆盖度、可燃物模型、气象因子等。其中,地形、坡度、坡向由NASA-DEM计算而来;林冠覆盖度则由Landsat系列卫星反演计算得到;可燃物模型则基于中国生态系统分类标准映射得到;气象数据则来源于中国气象数据网的邻近站点数据,主要包括风速、风向、气温、湿度、云覆盖等。最终将多要素重采样至30 m分辨率,进而实现多要素尺度的统一。
2.2.3 模型构建与部署
基于Rothermel模型的数学原理,结合输入数据,计算火灾在水平和垂直方向上的蔓延速率,并将其转化为火灾在地图坐标系下的蔓延速率。在此基础上,结合初始火点位置和不可燃区域等要素,通过修改预测步长和时间范围,并利用空间插值和时间推演等方法,生成林火蔓延轨迹图,进而反映林火在时间上和空间上的变化规律。
2.3 基于粒子模拟的三维可视化技术
2.3.1 粒子可视化技术
首先,分别创建火和烟的粒子系统对象,初始化其参数并将其加入三维场景。其次,根据火、烟的初始物理特征,设置对应的粒子系统初始渲染状态,建立粒子属性模板,将粒子的大小、颜色、纹理、生命周期等属性,与粒子系统相互关联。在此基础上,创建火、烟粒子系统的更新器,依据Rothermel模型的预测结果,更新每帧中粒子的属性和状态,如速度、位置和方向等,将其与粒子系统对象相关联,加入到场景中。
此外,创建标准放射器并与火(烟)粒子系统相互关联,其中包括发射器、放置器和计数器,分别实现决定粒子生成时的初始速度、控制粒子的发生位置、记录生成的粒子数量。之后根据火(烟)的运动特征,在标准编程器对象中实现多类别操作器,以通过控制生命周期内的粒子的运动状态,表现出火和烟等现象的变化特点。最终将火粒子系统和烟粒子系统对象构建为组节点,加载进场景根节点中(图2)。
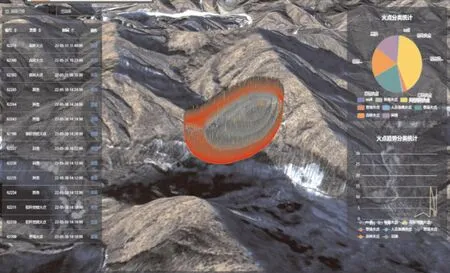
图2 火势蔓延推演及可视化
2.3.2 气象可视化技术
读取风场数据,根据数据格式设置粒子的存储结构,在格网中随机放置基本粒子并设置其属性,为了表达风场的整体结构会不同位置设置多个粒子同时追踪;从粒子的初始位置出发对速度函数数值积分得到其他时间的位置及粒子的运动轨迹,使风场粒子结构在格网中不断运动和更新。与此同时,在粒子不断运动的过程中根据密度要求在格网中删除旧粒子、生成新粒子,以控制粒子密度,保证粒子数量在一个范围内,最终实现风场粒子的追踪映射(图3)。
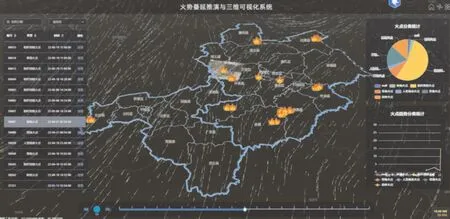
图3 气象可视化
3 实例分析
2020年4月30日,山西省大同火山群地质公园(113°36′36″~113°42′36″E,40°1′12″~40°4′12″N)发生了严重火灾,系抽烟引燃荒草导致,火场植被多以油松为主,火势较大,本研究以此作为研究案例,对火点检测与火势蔓延进行实例验证。
根据Himawari-8卫星AHI数据计算得到4月30日大同火灾燃烧期间的火点辐射功率(FRP,Wm-2)并绘制变化曲线图(图4)可知,火点区域的平均FRP在11:00便达到了132 Wm-2,随后逐渐上升,在15:00达到了最高,平均FRP达624 Wm-2,后逐渐下降,在20:00-21:00时有部分区域重燃,在22:00FRP降至低值,约为39.76 Wm-2。这与实际火灾燃烧时间较为一致(09:50起火,21:30明火扑灭),由此可见,基于Himawari-8进行火点检测切实可行。

图4 Himawari-8火点区域FRP
基于Himawari-8卫星监测到的初始火点位置、地理空间数据云平台下载的地形数据、全国综合气象信息数据共享平台获取的每日逐小时气象数据以及参考标准可燃物模型扩展集[10]制作的研究区域本地化可燃物模型,对大同火山群地质公园火灾进行模拟(图5)。从图5中可以看到在火灾的起始阶段,由于西风的作用,火线沿北侧山坡向东部蔓延,而南侧山坡由于风向作用和山脊道路的隔离,并未受到波及;随着风向逐渐由西风转为西南风,火线也逐渐向东北部蔓延,并逐渐危及东侧的大面积植被区;在火灾后期,起始点周边的火势已被控制,而东部大面积植被区则受损严重,但由于偏南风的作用,火势很难向更南方进行深度蔓延,整体火势已无再扩大趋势。
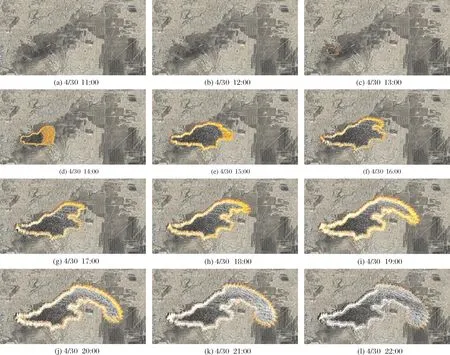
图5 火势蔓延模拟结果(步长:1 h)
对Sentinel-2卫星在火灾前后的假彩色影像(图6)进行对比分析可知,火灾实际情况与模拟结果总体较为类似,主要差别点在于火灾后期的东部植被区的模拟,这可能与实际灭火工作中消防人员对火势的控制与隔离等有关。火势蔓延模拟模块能较好地预测林火在实际边界条件下的火势发展情况,为林火防控指挥提供参考依据。

图6 火灾前后Sentinel-2卫星假彩色影像对比
4 结论与讨论
本文以山火检测及火势蔓延监控为研究目标,基于遥感+GIS技术,实现了山火检测及火势蔓延监控平台,主要包括三个部分:多模型联合的火点检测技术、基于Rothermel模型的地表火蔓延模拟和基于粒子模拟的三维可视化。多模型联合的火点检测技术利用多源遥感数据,结合阈值法、机器学习和深度学习等方法,实现了对地表高温异常点的自动识别和定位,具有较高的准确率和实时性,能够及时发现并报警山火发生。在此基础上,根据Rothermel模型,结合可燃物特征参数、气象因子和地形因子等数据,计算出林火蔓延速率,并通过空间插值和时间推演等方法,生成林火蔓延轨迹图,能够预测林火在不同条件下的发展趋势,为防控指挥提供参考依据。最终利用粒子系统来模拟林火蔓延过程和气象变化过程,构建出山区森林环境的三维场景,能够呈现出林火蔓延过程中的真实感和动态感,增强了平台的交互性和体验性。该平台不仅能够有效地监测山区森林中发生或可能发生的山火情况,还能够预测山火在未来一段时间内可能扩散到哪些区域,并以三维方式展示出来。
本文还有以下不足:山林火灾发生和蔓延的因素复杂多变,不确定性极大,要做到精确的火势蔓延模拟是比较困难的。Rothermel模型作为一个国外的半经验半物理模型,需要通过大量试验才能获取精确的参数,本文缺乏试验条件,只能采用假设值;并且已有的可燃物模型不能完全适用于国内研究区域,本文结合研究区域的可燃物植被类型进行简单映射也会限制蔓延精确程度。因此,下一步可以深入挖掘研究区域的可燃物相关参数,使Rothermel模型的本地化应用更加成熟和完善,为山林火防治提供更有力的辅助决策信息。
猜你喜欢
红外技术(2021年1期)2021-01-29
海洋信息技术与应用(2020年4期)2021-01-18
家庭科学·新健康(2019年10期)2019-11-18
消防界(电子版)(2018年15期)2018-08-29
鹿鸣(2018年1期)2018-01-30
郑州大学学报(理学版)(2017年3期)2017-08-07
中国环境监察(2016年7期)2016-10-23
环球时报(2016-07-14)2016-07-14
装备制造技术(2012年8期)2012-02-20
图学学报(2011年6期)2011-07-07
