测量机器人自动监测系统在水电站安全监测中的应用
2024-01-18 05:10王敏吉毛海东
今日自动化 2023年10期
王敏吉,张 松,毛海东
(1.中国电建集团贵阳勘测设计研究院有限公司,贵州贵阳 550081;2.贵州北盘江电力股份有限公司,贵州贵阳 550081)
水库大坝是我国防洪工程体系的重要组成部分,为国家带来巨大经济和社会效益的同时,也在防洪、供水、灌溉及改造生态环境等方面发挥了重大作用。大坝安全责任重大,大坝安全监测作为掌握大坝安全重要途径的意义显得尤为突出。大坝变形监测作为大坝安全监测的重点监测项目,是反映大坝结构安全性态的重要指标之一。大坝变形监测是对大坝坝体的几何变形量进行监测,分两种监测方法:①人工监测,主要通过全站仪、水准仪等测量设备来实现。②通过真空激光准直系统、GNSS 系统(全球导航卫星系统)、测量机器人自动监测系统等自动化测量系统进行监测。
真空激光准直系统采用管道对测点进行保护,使用真空泵抽取管道内空气,使管道内为真空环境,减低空气等因素对测量结果的影响,因此其测量精度高,抗干扰能力强,但对施工质量要求高,投资成本高,特别是后期故障率较高,运行维护要求高。GNSS 系统利用卫星进行实时定位,实现全天候自动连续监测,但受地形条件、多路径、卫星等影响,其测量精度偏低。测量机器人自动监测系统通过计算机控制智能型的全站仪自动进行搜索、跟踪、识别及精准照准目标,并获取目标的角度、距离、三维坐标等信息。测量机器人自动监测系统通常在监测区域布置若干固定测站,对安装于变形体的目标棱镜进行周期性、自动化观测,进而采用极坐标法或边角交会法等计算目标点的三维坐标及变形量。测量机器人自动监测系统在大坝变形监测相比于GNSS 系统,其精度和成本方面更具优势。
1 工程概况
马马崖水电站工程枢纽主要由碾压混凝土重力坝、坝身开敞式溢流表孔、坝身放空底孔、左岸引水系统、左岸地下厂房及右岸预留通航建筑物等组成。碾压混凝土重力坝坝顶高程592.00 m,最大坝高109 m,坝区河谷较平直,两岸河谷为不对称的“V”型,左岸为逆向坡,右岸为顺向坡。左岸地形640 m 高程以下为45°左右的陡坡,局部夹10 m 左右高的小悬坡,640~880 m 为75°左右的悬坡;右岸600 m 高程以下为100 m 左右的悬坡,600~765 m 高程为25°~35°斜坡或陡坡地形。
马马崖水电站的碾压混凝土重力坝采用折线形布置,坝顶宽12 m,上游放浪墙、人行道、门库等坝顶结构占据近10 m 空间,坝顶能够布置监测设备的空间小。同时折线形使需要直线布置的真空激光准直系统使用受限制。根据监测仪器设备的耐久性及稳定性,为满足量程和精度要求,坝顶布置了多种监测设备,包括水准点、垂线系统、静力水准系统、真空激光准直系统、表面观测墩等。大坝坝顶变形监测共布置7个监测点,分别布置了7个表面观测墩,采用视准线法进行人工观测,同时布置1套真空激光准直系统进行自动化观测,系统发射端和接收端的变形由倒垂线和静力水准系统进行校核,两种监测成果相互补充、验证。
2 测量机器人自动监测系统
2.1 系统组成
测量机器人自动监测系统由测量机器人、通讯及供电3个子系统组成。测量机器人子系统由基准站(含工作基点、后视基点)和监测点(含棱镜)构成,其中基准站布设在大坝变形区外的稳定山体上,布设有监测站和测量机器人子系统,受外部环境影响小,通视条件良好,同时后视基点应选择观测角度和距离适中的站点。通讯子系统通常采用有线、无线两种方式。供电子系统采用电站电源直接供电。
2.2 系统建设方案
大坝坝顶变形监测共布置7个表面观测墩测点,改造前采用极坐标法进行人工观测,测量机器人自动监测系统建成后可实现对大坝坝顶变形的自动监测。
测量机器人自动监测系统工作基点应建设在大坝变形区外的稳固山体上,保证其视野开阔,能够与各监测点及后视基点视通。根据工程实际情况,马马崖测量机器人自动监测系统工作基点设在大坝右岸的边坡上,大坝右岸边坡进行过喷锚处理,稳定性较好,该处可以与大坝坝顶7个监测点和2个后视基准点通视,工作基点与监测点、后视点的通视距离在400 m范围内,角度都在30°以内,能有效保证测量精度。
测量机器人自动监测系统的全站仪选用瑞士徕卡公司生产的TM50,该设备集成了高精度的测角和测距系统,自动照准距离达3 000 m,角度精度达0.5″,监测精度很高。TM50还具备IP65高防尘防水等级、高分辨率的图像测量技术、智能电源管理系统及高效便捷的WLAN 传输模块等,保障了仪器在恶劣环境下的高精度、高效率,全天候智能完成监测工作。
为了系统的稳定运行,在工作基点的位置修建监测站保护测量机器人自动监测系统,避免露天环境对系统设备的损害。玻璃式监测站存在玻璃窗的反射干扰,影响观测精度,因此监测站采用自动门窗式,观测过程中通过计算机系统控制电机启、闭门窗。同时监测站内配备了1套环境量监测仪器,在识别观测前的天气情况,避免极端天气时打开门窗对设备造成损坏的同时,监测区域内的气象数据,对观测成果进行修正。同时监测站配有防雷设施及视频监控系统,能够有效保障整个监测系统的精度和可靠性,测量机器人自动监测系统组成如图1所示。

图1 测量机器人自动监测系统组成
测量机器人自动监测系统的通讯采用8芯单模光纤通讯,穿管埋地的方式从监测站铺设到监测中心机房,监测中心机房布置监测服务器及配套测量管理软件接收原始数据,原始数据进行结算分析后,得到大坝变形最终成果。
测量机器人自动监测系统采用220 V 交流供电,从真空激光观测房取电,电缆敷设走向和方式与光缆相同。同时在监测站房屋顶安装1根避雷针,修1个混凝土墩,在里面提前预埋1根镀锌钢管,在钢管顶部焊上避雷针,底部焊接1个30 mm 的扁铁接入地网。配电箱内部的导轨插座上安装电源防浪涌保护。
3 成果分析
3.1 监测布置
大坝坝顶变形测点监测布置如图2所示。
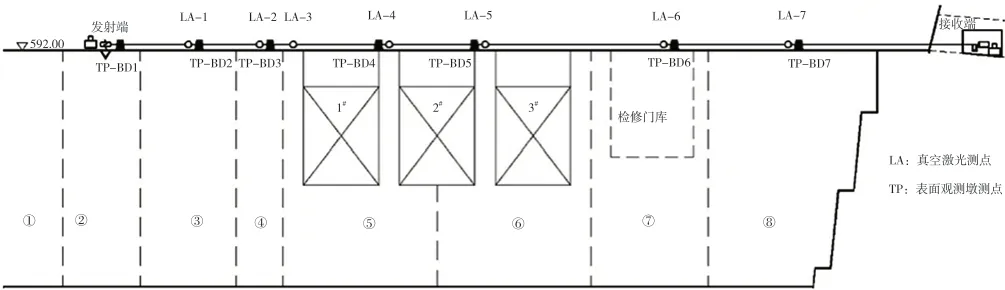
图2 大坝坝顶变形测点监测布置
3.2 监测成果分析
选取2021年7月至2023年6月两年的监测成果,典型测点水平位移过程线如图3和图4所示。

图4 TP-BD6测点测量机器人自动监测系统实测水平位移过程线及拟合曲线
从TP-BD5和TP-BD6实测水平位移过程线及拟合曲线可以得出:测量机器人自动监测系统实测水平位移过程线平顺,周期性变化规律明显,测值连续没有较大波动,能较好地反映坝顶水平位移的实际情况。
为了验证测量机器人自动监测系统的成果准确度,将测量机器人自动监测系统的测量与真空激光准直系统测量成果进行对比分析,如图5所示。
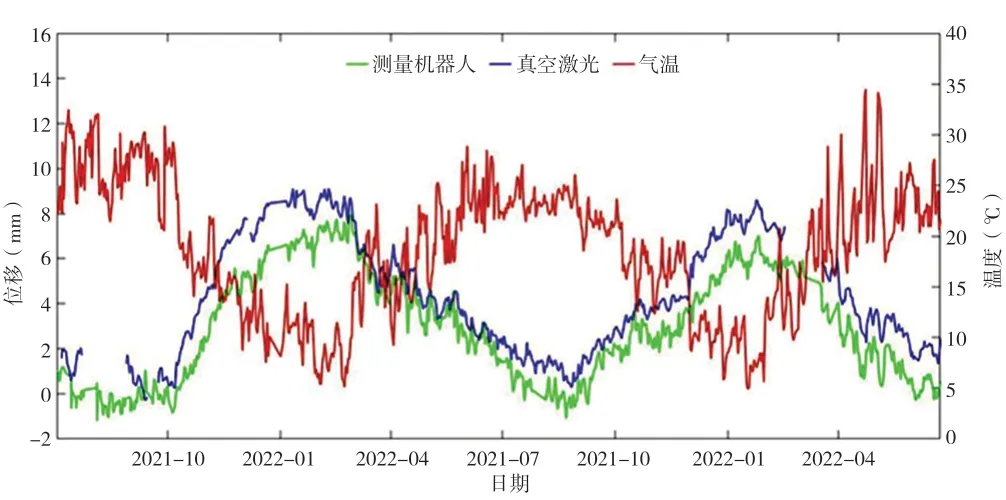
图5 TP-BD5测点测量机器人自动监测系统和真空激光准直系统实测水平位移过程线对比
由图5可知,测量机器人自动监测系统与真空激光准直系统实测水平位移吻合情况很好,变化规律具有同步性;量值上两者相差不太,均处于同一级别。坝顶水平位移变化呈明显年周期性,温度升高坝顶水平向上游变形,温度降低坝顶水平向下游变形,符合混凝土重力坝变形的规律。
测量机器人自动监测和真空激光实测位移的一致性,验证了测量机器人自动监测系统监测成果的准确性,实测数据的连续性也验证系统的可靠性及稳定性。
4 结束语
通过测量机器人自动监测系统对马马崖水电站大坝坝顶变形进行自动化监测,不但可提升工作效率,节约成本,满足大坝安全自动化的发展要求,也为后续的在线监控系统建设提供了有效保障。结合实测成果和真空激光准直系统的成果对比分析,成果在量级和吻合趋势的一致性,表明测量机器人自动监测系统的精度及可靠性较高,其经验可供类似工程参考,推广测量机器人自动监测系统在安全监测中的应用研究。
猜你喜欢
中国农村水利水电(2022年10期)2022-10-27
浙江水利水电学院学报(2022年1期)2022-04-14
成都信息工程大学学报(2019年1期)2019-05-20
四川环境(2019年6期)2019-03-04
百科知识(2018年6期)2018-04-03
中国环境监察(2016年8期)2016-10-23
湖南水利水电(2014年1期)2014-02-27
中国三峡(2013年11期)2013-11-21
化学分析计量(2013年3期)2013-03-11
城市道桥与防洪(2013年11期)2013-03-11