
一种适用于被动声学监测系统的海豚回声定位信号快速检测方法
2024-01-17 07:16薛睿超牛富强
声学技术 2023年6期
薛睿超,牛富强,2
(1.自然资源部第三海洋研究所,福建厦门 361005;2.厦门海洋职业技术学院,福建厦门 361005)
0 引言
被动声学监测(Passive Acoustic Monitoring,PAM)系统可实现对海洋哺乳动物的长期监测,已广泛用于海洋哺乳动物声学研究和保护,尤其是对海豚声信号的检测、分类和定位[1-3]。多数PAM 系统的检测目标为海豚用于定位、导航和觅食的回声定位信号(click)[4],部分也可检测海豚发出的哨叫声信号(whistle)[5]。然而,并非所有海豚都会发出哨叫声,例如喙鲸和鼠海豚[6]。因此,为了尽量多地覆盖物种,应尽可能使用click 检测器。click 信号与常见的脉冲信号(如爆炸声脉冲)不同,其具有短时、宽频、不规则等特性。不同的海豚物种之间,甚至在某些相同物种的个体之间,click信号的具体频谱特性也不相同,这可能与个体体型大小有关,也可能与栖息地和猎物的不同有关。研究click信号的特性也有助于更好地了解不同海豚物种间的区别和联系[7]。
海洋背景噪声中广泛存在大量瞬态噪声,其与海豚click 信号很难区分,给人工提取和计算机提取造成了很大的困难。常规的click 信号检测技术是能量检测器[8-9],其依靠特定物种发声信号序列的能量分布特征来区分click 信号和其他瞬态噪声,但该方法易将瞬态噪声判断为海豚click信号,使得海豚click 信号检测正确率降低。当该方法应用于长期PAM 系统中时,随着监测时间的增加,误检数量也大幅增加。目前应用最广泛的检测方法的是时频分析[10-14],根据频带、中心频率和信号长度等特征建立检测器,通过待测数据与检测器的互相关度来检测click 信号[6]。满足一定条件时该方法还可对物种进行分类,但时频分析是一个计算密集型的过程,特别是某些物种的click 信号需要400 kHz或更高的数据采样率,庞大的计算量导致PAM 系统需要频繁更换电池和存储设备,减少了工作时间,然而PAM 系统对工作时间的要求通常都较长,需要将设备部署数周、数月或更长时间,因此减少信号检测的算力需求对降低系统功耗和存储压力具有重大意义。近些年,机器学习技术[15-16]也被尝试用来对海豚click 信号进行检测识别,但需要大量的click 声信号作为样本进行训练,当处理的信号类型在训练样本中没有被覆盖时,容易产生误判。
另一方面,部分PAM 系统同时具有检测后续工作,如在工程海域,检测到海豚等动物的信号后将开启声学驱赶器,对动物进行驱赶。这些特别的应用场景对检测正确率提出了更高的要求,如果频繁发生错误检测,会对环境造成不利影响以及系统资源的大量浪费。因此,研究适用于PAM 系统的海豚click信号的快速检测技术具有重要意义。
本文提出了一种适用于PAM 系统的海豚回声定位信号检测方法。该方法在保证正确率的前提下,不需要进行FFT变换和频域分析,从而大大提高了计算速度并有效降低系统算力消耗,从而延长PAM 系统的工作时间。该算法结合了海豚回声定位信号的时域特征和生物活动特性,从而大幅提高了检测正确率和工作效率。
1 信号检测原理
1.1 信号特征分析
鲸豚类动物会发出多种咔嗒声、口哨声、唧唧声等类似的声音。其中海豚的click 信号是典型的宽频短时脉冲信号,频率分布范围广,在时、频域上有明显的识别特征。不同种类海豚间的声信号形式相似,但规模不同。其声特征随海豚的个体、年龄、生存环境、物种等条件变化都有所区别,click信号的频率范围可从几千赫到大约200 kHz,带宽从单一频率到100 kHz,脉冲长度从几十微秒到几毫秒。因此,具体应用时应根据目标物种和检测环境对参数进行修正。
以野外环境中华白海豚发声信号为样本开展分析。图1是广西北部湾野外环境采集到的经过高通滤波处理(1 kHz)中华白海豚的click声信号特征图。从图1(a)中时域波形图看,经降噪后click信号表现为瞬态脉冲信号,信号长度约为0.3 ms,信噪比高,有明显的识别特征。从图1(b)中的频谱图看,click信号频率覆盖范围从几千赫到约250 kHz,频率范围极宽,能量较集中,中心频率约为100 kHz,峰值频率为90 kHz。考虑到与其他瞬态噪声不易区分,检测方法多从频域入手,进行带通滤波后,获取时频图,再利用图像识别的算法与噪声进行区分。但图像处理是个算力密集的过程,对长期被动监测系统以及实时监测场景并不十分适用。综合考虑计算速度和检测正确率,应结合常用脉冲信号的时域检测方法以及信号特征进行处理。
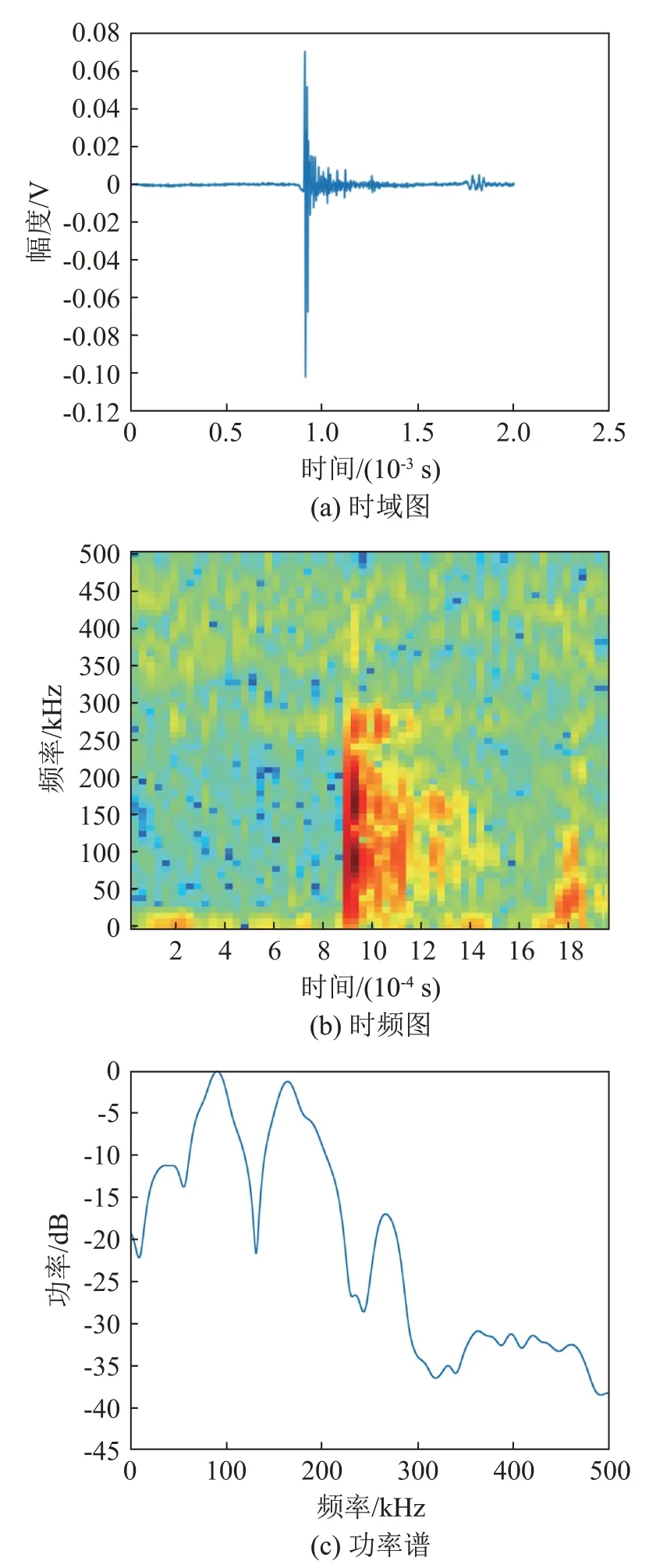
图1 海豚click信号的特征图Fig.1 Characteristic figures of dolphin click signal
1.2 检测流程
根据海豚click 声信号的时频特征,可使用信噪比(Signal Noise Ratio,SNR)计算方法进行初步信号检测,再以计算机自动处理的方法代替人工,大大提高了检测效率。海豚发声信号处理流程图如图2所示。
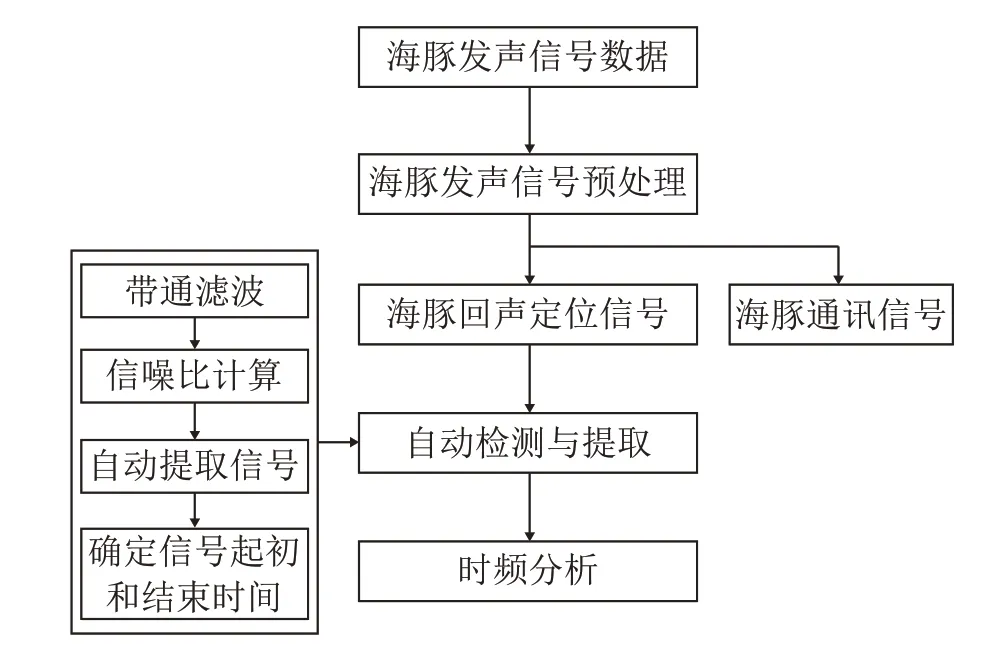
图2 海豚发声信号处理流程图Fig.2 Flow chart of dolphin voice signal processing
检测方法分为以下步骤:
(1)为获取信号与噪声的信噪比,需先进行带通滤波,再计算信噪比参数RSN:
其中:s代表含信号数据的时间序列,分母RMS是信号序列的均方根值(Root Mean Square,RMS),代表噪声水平,取信号幅度的绝对值,再除以噪声水平得到。
(2)设置信号检测门限值TH,当信号数据满足:
代表检测到疑似信号数据;相反,所有小于TH的数据视作噪声数据。信噪比判断检测的原理就是通过对信号幅度进行处理,放大有效信号和噪声的差距,与门限值比较取得大于门限值的数据。
门限值的选择将直接影响到检测信号的数量,过高会造成大量远距离和非主轴信号丢失,过低将大幅增加误报率。因此,可将静态门限值转换成动态门限值,并根据不同环境背景噪声的信噪比水平设置门限值大小,可以有效降低误报率。动态门限TH的计算方法考虑了平均噪声水平s(s=mean(RSN))、疑似信号的数量以及计算的总时间长度t,TH的计算公式为
(3)将幅度高于门限值的数据分组,每组数据组成一个完整的信号,并确定每个信号的起止位置。设置检测窗口长度为dt,dt由两个信号间的最小时间间隔决定。将所有满足RSN>TH的数据位置存入数组X,以数组第一个数据时间为起点,时间记为t(1),第二个数据时间记为t(2),判断t(2)-t(1)与dt的关系。如果t(2)-t(1)
1.3 信号筛选
1.2 节的检测方法处理后可得到数据中所有脉冲形态疑似信号的相关信息,但这些信号中掺杂着大量瞬态噪声信号,其形态与海豚click 信号极为相似,很难辨别。尤其在野外长时间测量的条件下,将导致非常高的系统误报率。为进一步提高检测正确率,本文根据海豚的信号特征和误报案例,在尽可能不影响计算速度的条件下,提出了信号筛选的方法。
1.3.1 误报因素分析
结合误报案例综合分析,导致高误报率主要有以下影响因素:
(1)由于海豚距离的不确定,信号强度也有较大的变化,距离较近的海豚click 信号强度,往往海面/海底的一次反射强度已经大于远处海豚的直达信号。
(2)野外采集环境不同于室内环境,存在大量预期外的宽频干扰信号,包括人为噪声、自然噪声和生物噪声,典型噪声源如近海工程、养殖鱼类和大量分布的螯虾等。这些噪声与海豚click 信号的形态非常相似,常规脉冲信号的检测方法基本无法判断。
(3)海豚常聚集活动,因此接收的声信号偶尔会出现混叠的情况,使信号间隔难以判断,可能造成误报。
1.3.2 信号筛选方法
根据上述海豚click 信号的特点,考虑对疑似信号组采用以下筛选方法:
(1)控制信号时间长度
海豚click 信号的时间长度是很重要的信号特征,实际检测中发现,一些瞬态噪声信号往往表现出时间长度过长或极短,因此设置时间长度区间作为过滤条件是非常有效的手段。通过设置信号长度门限进行筛选,而干扰信号刚好处于符合时间长度范围的概率较低,可以大幅降低误报率。但该值在不同种类海豚间差别较大,应根据检测目标进行调整。
(2)引入时间间隔参数
对提取结果进行分析,发现很大一部分误检信号来源是原信号的海面/海底反射信号。该类干扰信号在各信号特征上与原信号基本相同,因此很难去除。通过引入时间间隔参数,并设置信号间的最小间隔时间,可以有效抑制这类干扰的误检。另外,由于该类干扰是伴随真实信号产生,因此对系统检测正确率影响较小。
(3)孤立信号去除
click 信号往往是成串出现,因此孤立信号(指在信号前后一定时间范围内没有其他信号)极大可能是各种干扰信号,因此采用去除孤立信号的方法可以有效去除部分干扰信号。
进行信号筛选计算后,海豚click 信号算法优化处理效果如图3所示。图3中红圈代表检测到的疑似信号,虚线代表检测阈值。通过图3(a)~3(d)对比可以检测算法的实际效果。如图3(a)中共检测到14个疑似信号,在图3(b)中经过算法处理去掉了反射信号,仅剩7个疑似信号;同理,图3(d)去掉了图3(c)中高幅度的瞬态噪声信号。
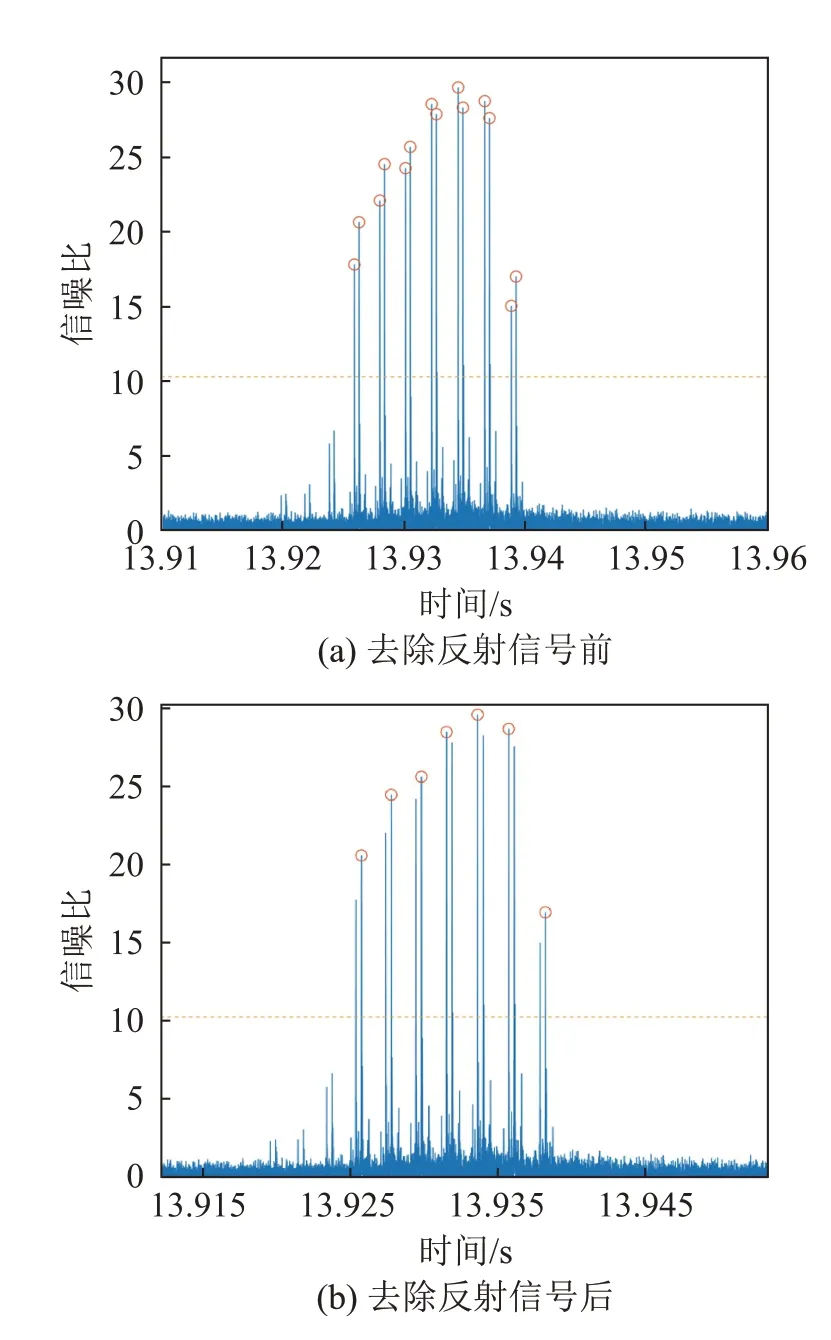
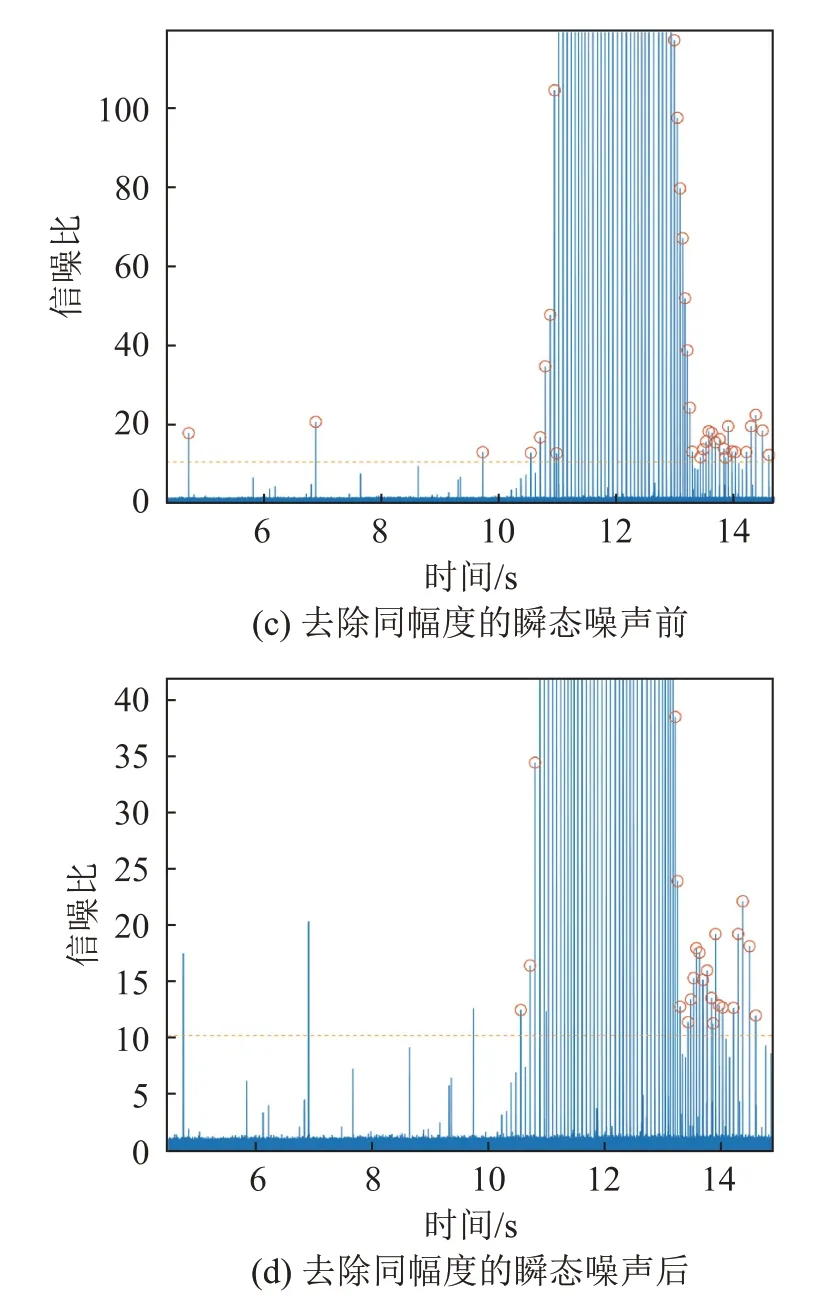
图3 海豚click信号优化算法处理效果的对比图Fig.3 Comparison diagram of the processing effects of the dolphin click signal optimization algorithm
2 实例分析
本节用以下实例进行说明。取一段野外环境中采集的含有海豚click 信号的数据段,长度为1 s。待处理的原始信号如图4所示。该组数据内的click信号不成串,分布较分散,可能含有多只海豚同时发声的混叠信号,且存在较多干扰,检测难度大,可以有效检测本文算法对异常信号的处理效果。通过观察,数据段内可辨别出9个疑似信号,其中图4(b)中的6 号信号由于信号幅度较高,含有一个明显的反射信号,其反射信号的信噪比甚至大于其他正常信号。
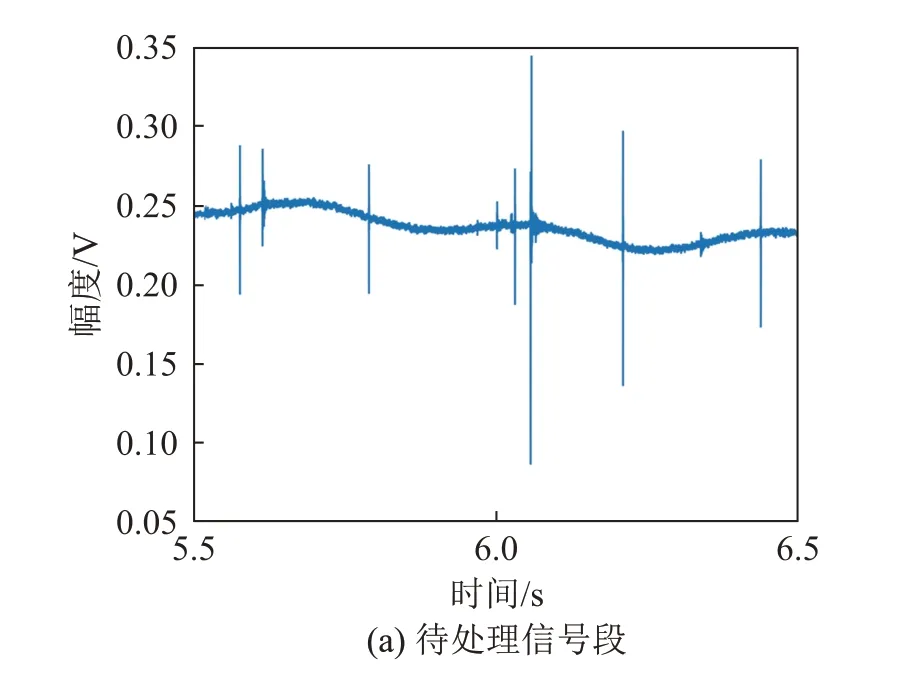
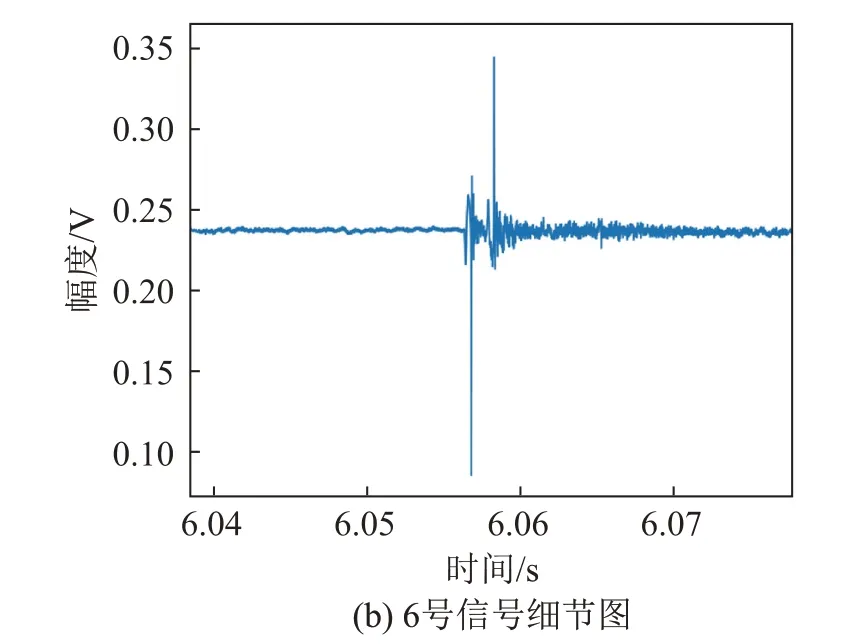
图4 待处理原始信号Fig.4 The raw signal to be processed
图5分别展示了整段数据和单个信号的不同处理流程。其中图5(a)~5(c)分别为:滤波后的时域波形图,干扰信号被有效压制;经过信噪比方法处理后的数据,每个信号由若干个数据点组成;经过信号筛选算法计算后的处理结果。图5(d)~5(f)为上述单个信号的处理流程。最终剩下6个有效信号,其中每个信号的位置由峰值位置决定,如图5(f)所示。
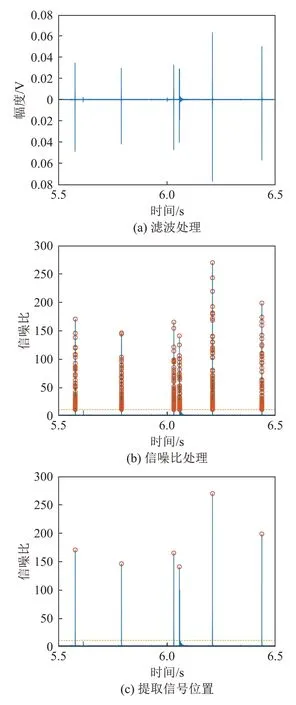
图5 整段数据和单个信号处理程序示例图Fig.5 Example diagrams of signal processing for whole data and individual signal
3 数据测试及分析
测试数据来源于项目组开展的海豚声信号采集实验。本文选取了同一设备采集的野外和室内两种生存环境的海豚发声信号以验证方法的可靠性。野外采集数据来源于广西沙田湾海域采集的中华白海豚发声数据,室内养殖环境采集数据来源于漳州市天柱山海洋世界圈养的宽吻海豚发声数据。采集使用的水听器由国内某研究所生产,可满足cilck 信号的频段范围且经过水声一级计量站校准,信号采样率为1 MHz。对野外环境和室内环境数据分类讨论。
3.1 野外环境
野外记录海豚发声数据由于受海洋背景环境、所乘航船的摆动等影响,往往夹杂着复杂的环境噪声,其中包含温暖浅海中鼓虾等生物的活动声、水动力噪声以及其他噪声源如船只、水泵等的噪声,海豚发出的哨叫声也会对检测造成干扰。从频段分析,海豚click信号分布频带较宽,持续时间较短,是典型的脉冲信号;水下舰船辐射噪声的频率一般分布在500~1 000 Hz范围内;海豚哨号信号频率分布在几千至几十千赫,这些噪声对信号检测干扰较小;由海风、海流等引起的水动力噪声频谱一般分布于0.5~50 kHz之间,是海洋环境噪声的主要噪声成分,也是海豚click信号检测的主要干扰源。
北海沙田湾调查采集到的中华白海豚信号如图6(a)所示。该数据段存在非常大的幅度起伏,较难辨认信号。分析干扰产生的原因,一是采集环境为野外航船,采集设备随水流摆动,自噪声较强;二是水深较浅(一般小于100 m),在海面海底反射、海面风浪的作用下,背景噪声成分复杂。总的来说,原始数据中存在较大的电流偏置,并包含其他常见噪声,包括扰动噪声、采集系统的自噪声、水动力噪声,附近船舶的航行噪声以及其他未知噪声。为了最大程度去除干扰信号,首先降低信号的偏置电压,进行50~150 kHz频带(中心频率假设为100 kHz,降低高频和低频噪声干扰,保存大部分信号)带通滤波得到结果如图6(b)所示。滤波后,部分干扰信号消失,该段数据中主要包含两个信号串,每个信号串包含数十个click 信号。通过带通滤波降噪,部分背景噪声已经被消除,信号干扰情况显著改善。
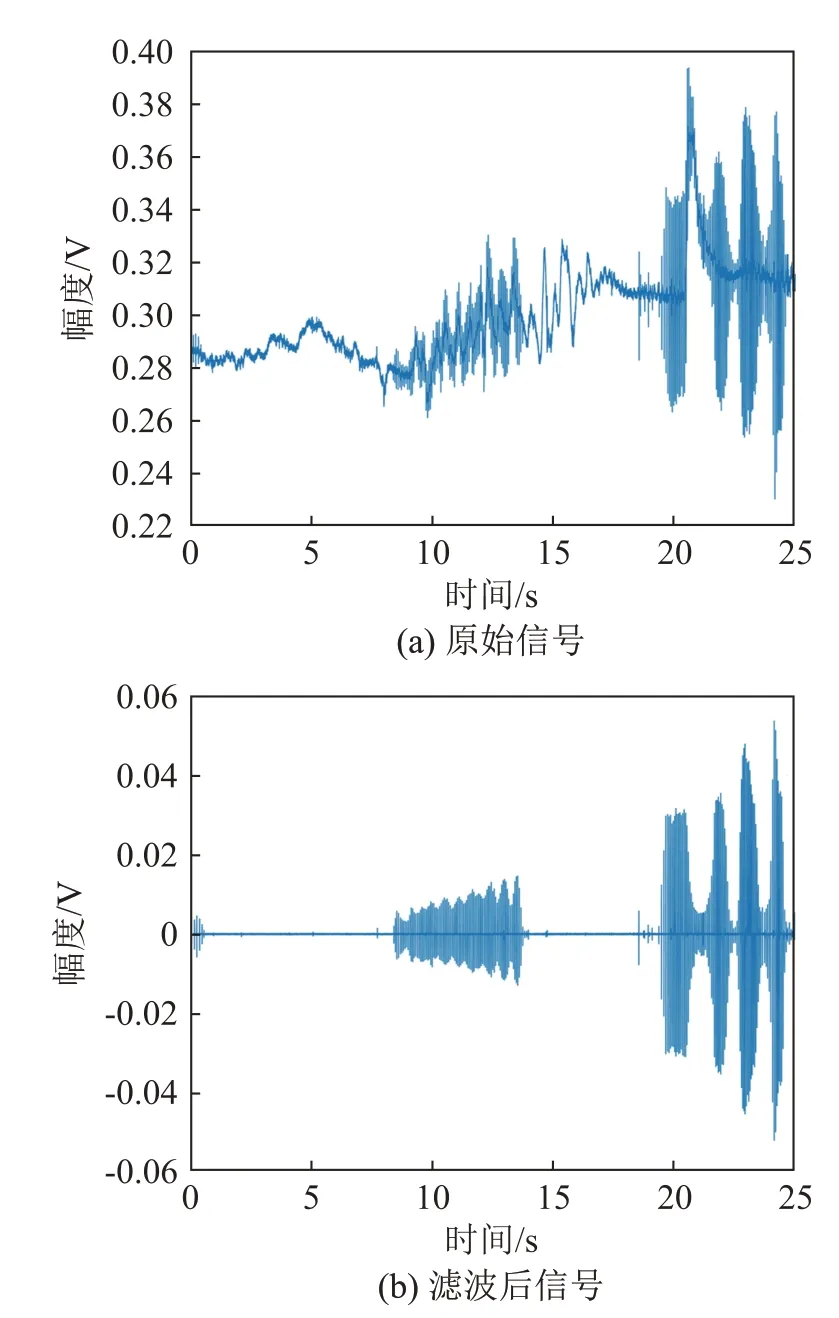
图6 野外环境采集的海豚信号Fig.6 Dolphin signals collected in the field environment
3.2 室内环境
室内记录到的数据相对野外采集数据,整体背景噪声级较低,不存在水流、风浪的影响,信噪比较低的信号也能分辨出来,检测时应注意门限阈值的设置。以天柱山海洋世界采集到的宽吻海豚发声信号为例,信号波形如图7所示。图7(a)中为采集的原始数据的时域波形图,该数据段存在一定强度的背景噪声,根据现场条件推测,主要噪声源为水池中动物的活动噪声,换水、增氧、保温等设备的工作噪声。对原始信号进行50~150 kHz带通滤波,得到结果如图7(b)所示。滤波后,由于部分频段被截止,信号强度略有下降,环境噪声明显下降。

图7 室内环境采集的海豚信号Fig.7 Dolphin signal collected in indoor environment
3.3 分析和讨论
选取了3段野外环境和3段室内环境采集的数据进行测试。所选数据中都含有海豚click信号串,信号采样率为1 MHz。测试过程中使用本文的快速检测算法提取信号,使用Adobe Audition软件人工检查筛选信号开展验证,通过时频特征辨别click信号,统计算法的检测正确率。由于本文计算使用数字滤波器,PAM 系统为提高计算速度,可使用物理滤波器,因此分别统计了计算过程中滤波和实际计算所消耗的时间;并对数据进行了FFT变换处理(模拟频谱处理)并统计计算时间作为对比。数据处理结果如表1所示。

表1 本文方法的检测能力测试结果Table 1 Test results of the detection capability of the proposed method
对于不同环境下采集信号的测试结果,开展以下分析:
(1)对于野外环境信号,误检信号多为瞬态噪声信号以及反射信号;远距离的反射信号在现有条件下难以区分;超宽频的瞬态噪声仍然难以区分存在单个脉冲信号被删除的情况。漏检信号基本是低于信噪比门限的信号;信号密度越大,检测正确率越高;开展功率谱分析可进一步提高检测正确率,但会降低计算速度。
(2)对于室内环境信号,只存在极少量的瞬态噪声信号;低背景噪声使低信噪比的信号可提取。
(3)综合分析,从计算速度上来看,不考虑滤波时间,本文算法的计算时间仅为FFT处理时间的1/20左右;野外和室内环境的数据处理速度没有差别;数字滤波的时间大约是检测计算时间的4 倍。以上的数据代表对明确含有目标信号的数据文件的处理结果,对于大批量只含有噪声的数据误报率会不断增加。因此在后期处理中,可先人工筛选掉没有信号的噪声时段,再使用检测方法,可以大幅提高检测正确率;对于特殊应用场景,当对检测正确率有较高要求时,可通过大幅提高检测门限阈值保证正确率。
4 结论
本文提出了一种基于时域特征的海豚click 信号快速检测方法,可实现从信噪比低、多干扰的海洋背景噪声中快速检测海豚click 发声信号,具有计算速度快、准确度高的特点。本文所用方法不依靠FFT变换和频谱分析,从而降低了算力需求,可适用于长期工作的PAM 系统。通过不同采集环境下的数据测试,本文算法对野外环境和室内环境采集的数据检测正确率均达到90%以上。需要指出的是,文中使用的计算参数只适用于测试使用的中华白海豚和宽吻海豚的发声数据,实际应用时根据目标种类和检测环境对参数进行修正。另外,对其他种类的海豚,本文的方法可能会出现不适用的情况。本文方法可为海豚回声定位信号的声学被动长时间监测以及相关设备的研发提供技术支持。
猜你喜欢
汽车观察(2021年11期)2021-04-24
中华养生保健(2020年7期)2020-11-16
北京航空航天大学学报(2019年9期)2019-10-26
学生天地(2019年30期)2019-08-25
电子测试(2018年11期)2018-06-26
雷达学报(2017年3期)2018-01-19
家教世界·创新阅读(2016年11期)2016-12-27
天津护理(2016年3期)2016-12-01
故事会(2016年15期)2016-08-23
西南石油大学学报(自然科学版)(2015年5期)2015-04-16
