一种船式垃圾收集装置设计
2024-01-16 10:17杜加福苏光富何晨旭庄忠猛何德强
河南科技 2023年23期
杜加福 苏光富 何晨旭 庄忠猛 何德强 林 权
(武夷学院,福建 武夷山 354300)
0 引言
近年来,城市公园水域、乡镇池塘、湖泊、水产养殖场等小型水域的垃圾污染日趋严重,许多景区的人工湖泊、河流、湖海及邻边水域受到矿泉水瓶、枯树叶、塑料袋等水面漂浮垃圾的影响,对水质造成严重破坏,甚至破坏生态平衡,给人民的日常生活带来很大隐患[1-3]。国内外对大型水域水面垃圾收集方式的研究和相关机械产品有很多,但对小型水域的水面垃圾收集装置的研究和开发相对较少[4-7]。本研究研发出一种自适应能力强、便于携带、结构简单、装拆调整方便、工作效率高、控制灵活的水面垃圾收集装置,具有非常重要的现实意义。
1 船式垃圾收集装置总体结构
船式垃圾收集装置总体结构如图1 所示,主要由动力部分、传动部分、收集器、动力源及辅助部分构成。动力部分作为动力源,实现船体水下推进器三自由度的运动形式。隔离板辅助部分通过开合动作辅助收集水面漂浮物,从而提高垃圾进入船口速度,提高收集效率。恒温箱体辅助部分主要用于保护装置全部电路。太阳能追光辅助部分将太阳能实时转化为电能,为装置提供能源。传动部分将输送带收集到的水面漂浮物传送至收集器内,完成对水面漂浮物的收集工作。
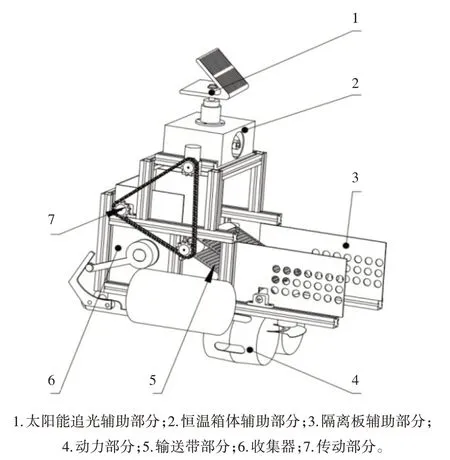
图1 装置总体结构
2 各组成部分方案设计
2.1 动力部分结构设计
动力部分结构如图2 所示,由机架、两个浮筒和两个水下推进器组成。通过模型质量分析,整个装置所需浮力为68.6 N,因此,在船体两侧设计两个浮筒,提供船体的浮力需求,并在船体下方布置了两个水下推进器,实现三自由度运动。该装置动力采用传统螺旋桨推进技术,螺旋桨只能绕其轴线旋转,通过改变螺旋桨同步转速和转速差来改变各螺旋桨推进力参数,从而控制船体前进、倒退、左右转向运动。为了防止水下的杂物缠绕扇叶,设计了马达外壳,用于保护水下无刷马达,保证水下无刷马达能更加安全高效地在水下进行动力输出。
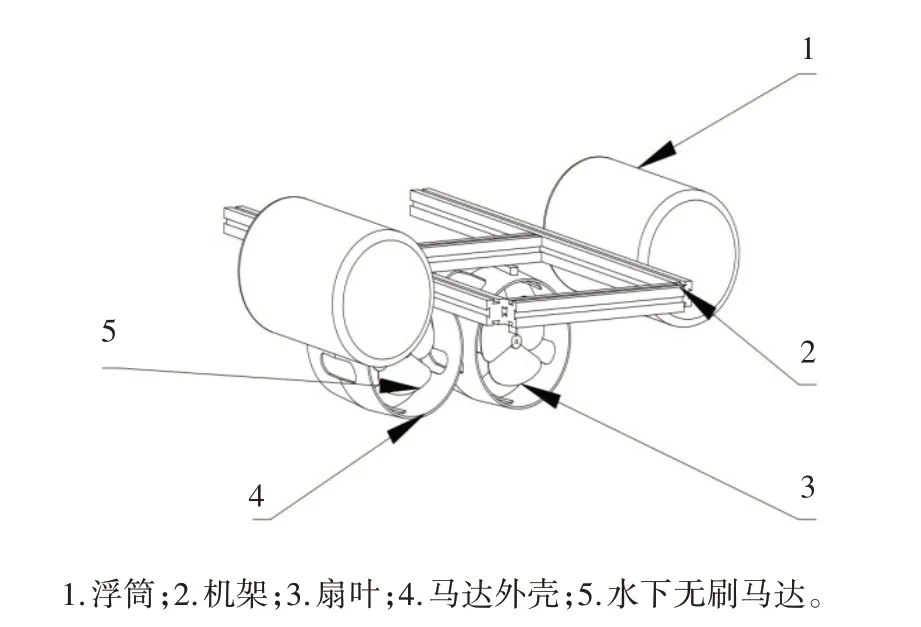
图2 动力部分结构
2.2 传动部分结构设计
传动部分结构如图3 所示,以链传动为主,带动垃圾输送带向上或向下运动,将水面漂浮垃圾送入收集器中。通过PLC 编程设计,控制电机及光电开关检测器,实现输送带两种速度状态,即低速和高速。传动部分利用光电感应开关工作原理,当传送带上被检测到有垃圾时,使用高速,将垃圾输送至收集器中,若10 s 内未检测到垃圾,则由高速切换到低速状态,从而达到节能的目的。输送带结构如图4所示。
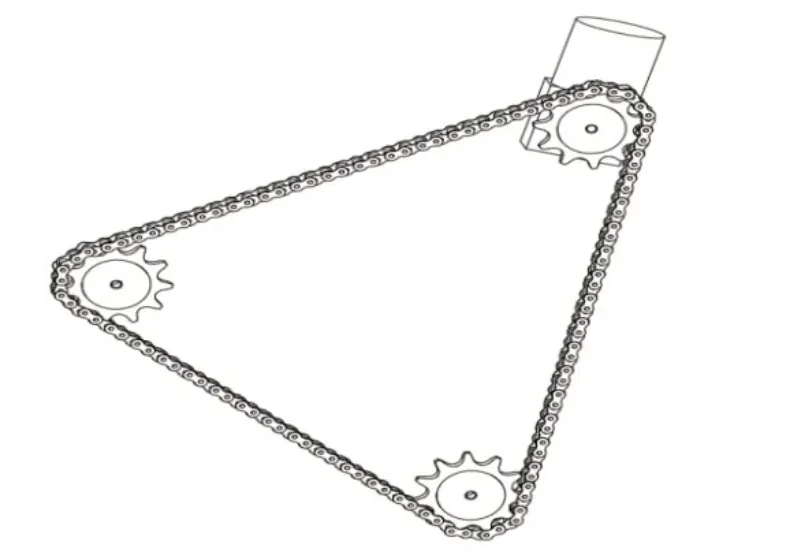
图3 链传动部分结构

图4 输送带结构
2.3 收集器结构设计
收集器装置如图5 所示,由收集箱体、曲柄、舵机、底盖、摇杆和插销组成。为了方便取出收集器内的垃圾,采用舵机驱动曲柄摇杆方式,将底盖与摇杆固定在一起,实现一定角度的旋转开合,使垃圾通过底盖滑出收集箱体,完成收集垃圾的清洁工作。收集器开合控制方式有两种,分别为按键控制模式和超声波测距控制模式。按键开关使用方式简单,直接连接对应89C52 单片机上的按键进行编程来实现,通过按键控制舵机。超声波测距方式是通过外接一个HC-SR04 模块进行编程,HC-SR04模块有四个引脚,其中两个接电源、两个负责发送和接收超声波,根据时间差和声音传播速度来计算出HC-SR04 模块到前方障碍物的距离,通过检测到的距离来控制舵机。
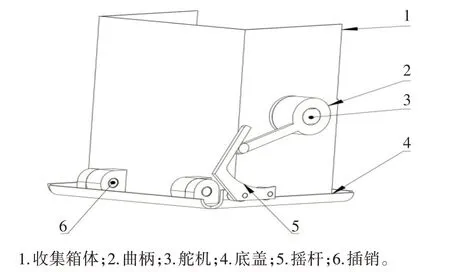
图5 收集器结构
2.4 辅助部分结构设计
隔离板辅助装置结构如图6 所示,由隔离板、水下电机、扇叶、机架和轴承组成。为了使水面漂浮物能更好地集中到船口处,设计了两个水下电机,在水下完成顺逆方向的旋转,从而形成涡流,利用形成的涡流,吸引船口附近的垃圾靠近船口,再利用隔离板对垃圾进行框选,框选至输送带的范围内,最后通过输送带传送垃圾到收集器,完成辅助垃圾收集的工作。隔离板上开设有排水孔,以便隔离板框选垃圾时能将积水通过排水孔排出。

图6 隔离板辅助结构
太阳能追光辅助装置结构如图7 所示,由太阳能板、法兰盘、电机、固定底座组成。该装置通过控制电机正反转来控制太阳能板朝向。电机与太阳能板通过法兰盘连接固定,电机安装固定在恒温箱体上方,该装置将太阳能转化为电能,保证船式垃圾收集装置能持续工作。

图7 太阳能追光辅助结构
3 船式垃圾收集装置工作原理
船式垃圾收集装置总装如图8 所示。该装置依靠水下无刷马达带动扇叶驱动前进,并利用两侧马达间的差速控制来实现前进、后退、转向功能,利用浮筒来实现在水面上漂浮。该装置工作时,通过远程遥控来控制垃圾收集装置靠近水面上的垃圾,前置隔离板带有两个顺逆旋转的马达,用于驱动扇叶,在水下形成顺逆涡流,形成的顺逆涡流能吸引附近的垃圾靠近船口处,再通过动力装置控制船体方向,利用隔离板框选需要收集的垃圾,框选至输送带口位置,由带轮带动输送带将垃圾往收集器方向输送,完成垃圾收集工作。该装置通过编程控制隔离板前的两个马达和链传动直流电机,当光电开关检测器在船口处及输送带上感应到垃圾时,直流电机和马达为高速态,能提升收集效率。当没有感应到垃圾时,直流电机和马达为低速态,能实现节能减排的效果。该装置还利用恒温箱体装置保护好全部电路,延长电路的使用寿命,装置的电能由太阳能追光装置提供。
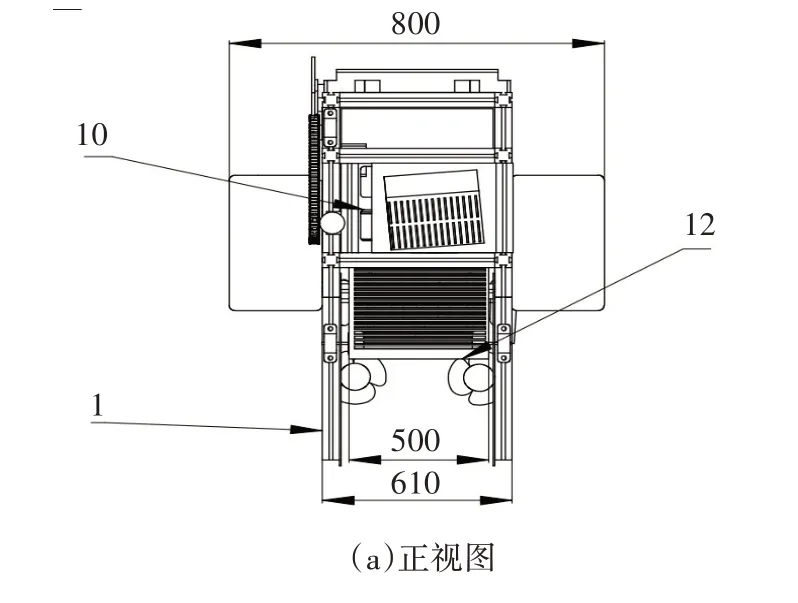
图8 船式垃圾收集装置总装(单位:mm)
4 结语
目前,主要还是以人工操机打捞和机械船只方式来打捞水面垃圾漂浮物,不仅浪费了较多的人力和物力,且打捞效率不高,应用场景有限,无法在特定水域工作。本研究从节约人力和物力及提高应用场景的角度出发,研发出一种船式垃圾收集装置,可实现对各种水域内的水面垃圾漂浮物的自动清洁,人工参与度低,大大提高了水面垃圾漂浮物收集的效率,利用智能化机电的有效结合,是一种集自动化和机械化结合的新型装置,能实现自动感应、智能调节电机高低速态模式、传送垃圾、温湿度检测调节、实时提供太阳能和蓄电池双重电源等功能,不仅能大大提升装置的性能,还能取代传统治理水环境的方式,解决传统治理水环境难题。
猜你喜欢
智慧少年(2022年7期)2022-06-24
中国典型病例大全(2022年11期)2022-05-13
现代仪器与医疗(2021年1期)2021-06-09
三峡生态环境监测(2020年2期)2020-07-28
东北电力技术(2018年10期)2018-12-12
学苑创造·A版(2016年3期)2016-04-16
设备管理与维修(2016年5期)2016-03-16
橡胶工业(2015年10期)2015-08-01
科学启蒙(2015年2期)2015-02-12
电视技术(2014年7期)2014-03-11