IPMSM自适应超螺旋滑模永磁磁链观测器设计与研究
2024-01-16 06:20:46李罗王兵郭皓源彭诚
机床与液压 2023年24期
李罗,王兵,郭皓源,彭诚
(1.湖南工业大学电气与信息工程学院,湖南株洲 412007;2.湖南工业大学电传动控制与智能装备湖南省重点实验室,湖南株洲 412007)
0 前言
内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor,IPMSM)能在高速状态下稳定运行,在众多领域得到了广泛应用。在高性能的IPMSM控制系统中,获得准确的磁链信息是必要的[1]。在电机运行过程中,电机内部的温度变化、电枢反应、机械振动等因素都会对永磁体产生影响,使得永磁磁链发生改变,严重时会出现失磁现象[2]。当电机发生失磁故障时,电机的空载反电动势、带负载能力降低。在负载未发生变化而电机出现失磁故障的情况下,为平衡电机输出电磁转矩和负载转矩,功率角增大、电流增加,进一步增加失磁风险,影响电机效率,导致电机报废并引发安全事故。因此,实现对永磁体磁链的在线监测具有重大意义[3]。
为实现永磁体磁链在线监测,众多学者提出了解决方法。文献[4]提出一种扩展卡尔曼滤波法,实现了对磁链的在线识别并矫正。文献[5]利用注入弱磁电流的方法,采用粒子群算法,成功对电机多个参数进行辨识。文献[6]基于滑模变结构理论对永磁体磁链进行在线辨识。文献[7]针对永磁磁链观测与驱动协调控制展开研究,设计超螺旋永磁磁链观测器,实现对永磁磁链的准确辨识,提高了电机控制效率。文献[8]通过改进卡尔曼算法,实现了对于永磁磁链的观测,并减小了观测波动幅度,且提高了观测速度。文献[9]通过注入高频正弦电压实现了电机永磁磁链以及其余参数的辨识,解决了欠质导致参数辨识的相互耦合问题。文献[10]运用滑模变结构理论,构建滑模磁链观测器,实现了对永磁同步电机正常和失磁状态下的永磁磁链观测,但未考虑其余电机参数影响。以上方法均是在电机参数不变的情况下对永磁磁链进行的在线观测。但定子电阻受温度影响,磁场饱和也会使电感发生改变,若不考虑参数变化而使用固定参数构建磁链观测器,观测精度会下降,并且d、q轴电流无法彻底解耦,使得系统运行的可靠性和动静态性能指标受到影响[11]。文献[12]将自适应算法与滑模算法结合,考虑电感变化对于永磁磁链观察的影响,实现了转子磁链的准确辨识。文献[13]考虑电阻变化对永磁磁链的影响,采用非奇异终端滑模观测器对永磁磁链进行辨识,但所设计的观测器调节参数过多,不利于实现。
针对传统滑模观测器的抖振影响系统稳定性,同时考虑电机定子电阻发生改变,为保证磁链观测精准度,本文作者在失磁工况下构建IPMSM失磁模型,参考自适应算法与超螺旋滑模变结构相结合,构建自适应磁链观测器,通过Lyapunov函数设计电阻的自适应律,实现电阻的辨识。
1 IPMSM 失磁模型
当IPMSM发生失磁故障时,永磁体磁链矢量幅值变化如图1所示。
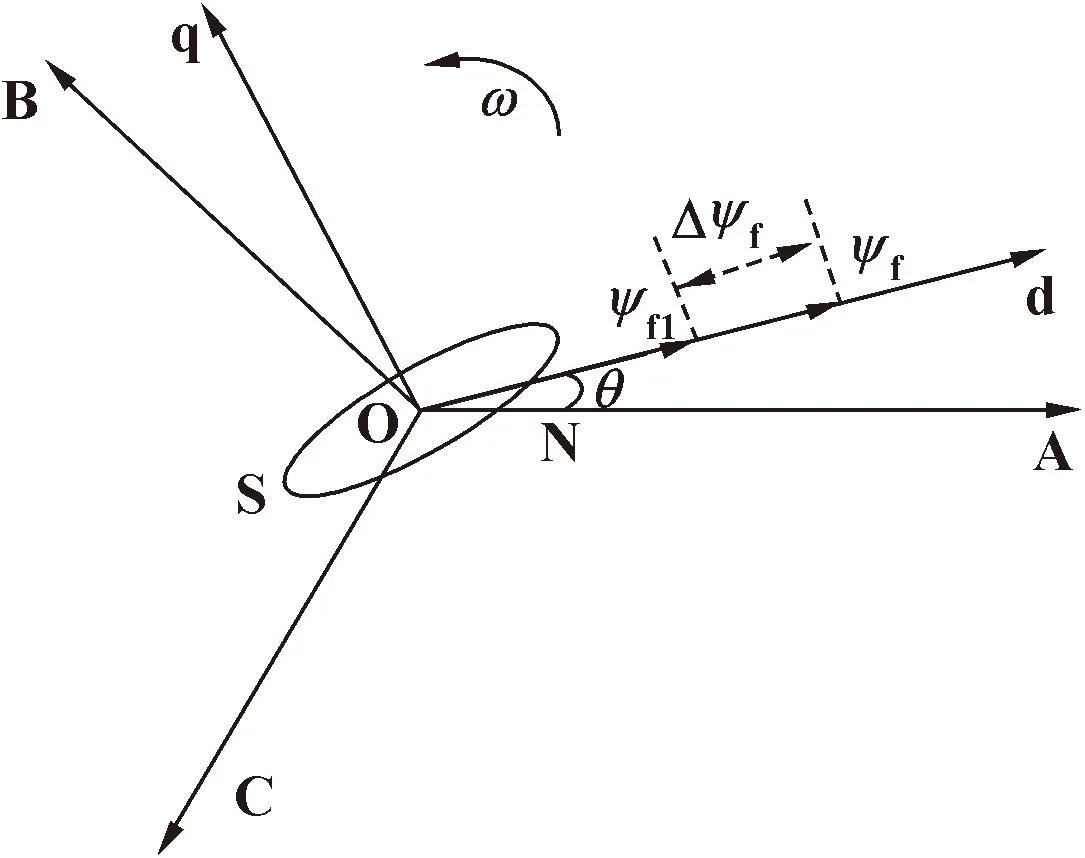
图1 IPMSM永磁磁链的变化Fig.1 Changes of IPMSM permanent magnet flux linkage
在d-q坐标系下IPMSM失磁方程为
(1)
式中:Ld、Lq分别为d、q轴电感;id、iq分别为d、q轴电流;ud、uq分别为d、q轴电压;R为定子电阻;ωe为电子角速度;ψf为永磁体磁链。
以定子电流为状态变量,由式(1)可得IPMSM在d-q坐标系下状态方程为
(2)
系数矩阵为
2 自适应超螺旋滑模观测器设计
2.1 传统滑模观测器分析
根据滑模变结构理论[14]和d-q坐标系下IPMSM失磁情况下的数学模型,考虑实际情况下电阻的改变,式(2)变为
(3)
对应系数矩阵为
式中:上标~代表标称值;Δ表示参数摄动值。
未考虑电阻参数变化的情况下,将电机参数做标称值处理,对式(3)所述系统设计如下滑模观测器,即
(4)
取状态误差:

(5)
将式(3)减式(4)可得:
(6)
(7)

(8)
将式(7)减式(8)得:
(9)
(10)
由上述可知,在传统滑模观测器设计过程中,将电阻参数作为常数处理将造成观测结果不准确。同时,传统滑模观测器中会引入不连续项,高频切换会导致系统抖振,严重时会使系统失衡。
2.2 自适应超螺旋滑模观测器设计
2.2.1 自适应电阻观测器
在内置式永磁同步电机中,电阻受温度影响呈现明显非线性关系,其表达式[17]为
R(t)=R0[1+α(t-t0)]
(11)
为实现对永磁磁链的准确观测,考虑电阻参数变化对观测的影响,设计自适应电阻观测器:
(12)

系数矩阵A改写为
从而:
通过式(2)、(12)得到观测器误差方程:
Def-ksgn(e)
(13)

选取式(13)作为 Lyapunov 函数:
(14)
式中:γ为待设计的常数。
由式(13)并对式(14)求导可得:
(15)
令:
(16)
(17)
(18)

设计矩阵H为对角矩阵,且主对角线元素为正值,即h1>0,h2>0,则
eT(A-H)≤0
(19)
(20)
(21)
综合式(17)(19)(21)可知
(22)

(23)

(24)

由式(16)(22)(24)可得:
(25)
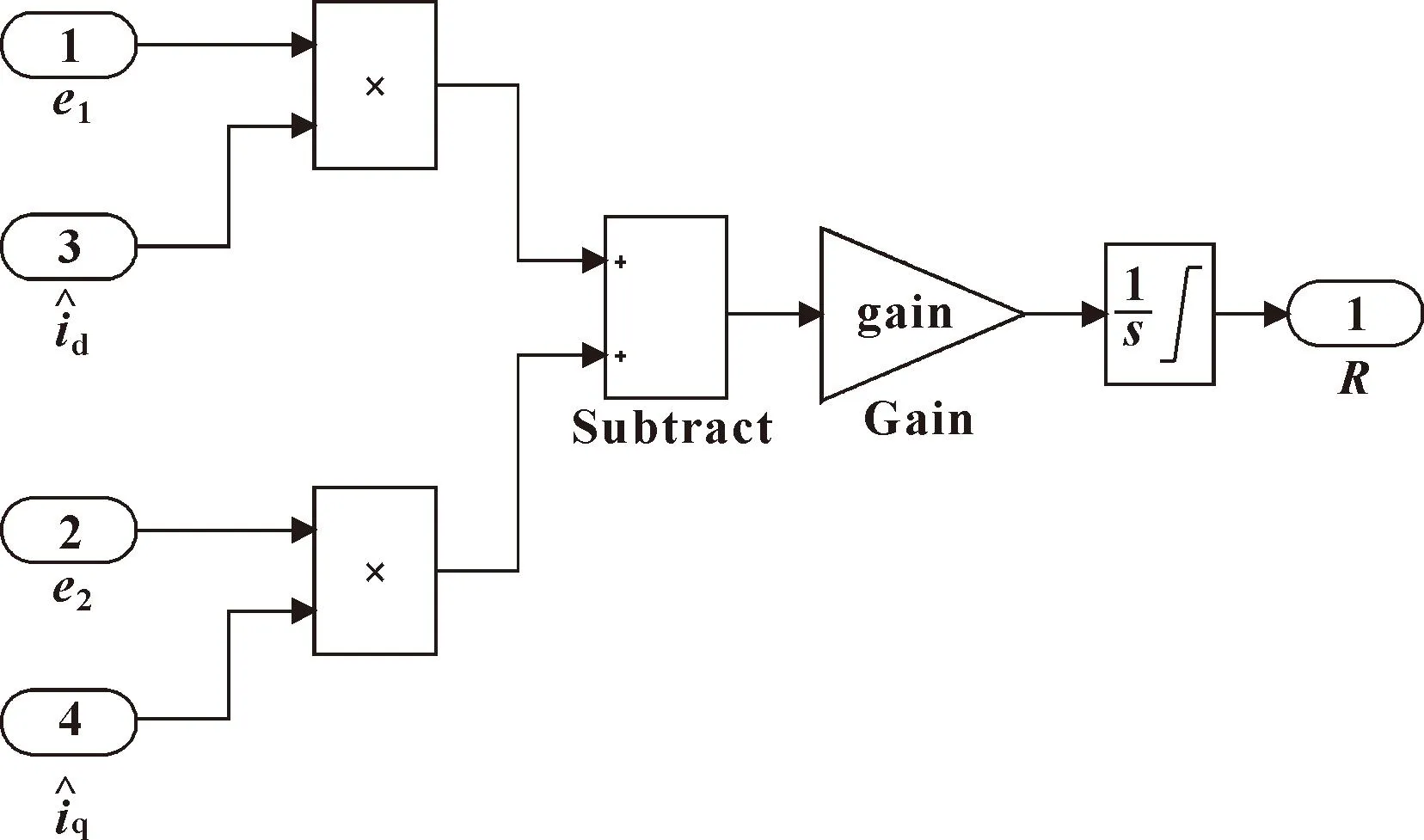
图2 自适应电阻观测器仿真模型Fig.2 Simulation model of adaptive resistance observer
2.2.2 超螺旋滑模观测器及其稳定性证明
高阶滑模能够大幅度抑制抖振,为保证观测器的稳定性能,文中采用超螺旋滑模代替普通滑模。根据式(2)构造超螺旋滑模观测器:
(26)
(27)
从式(27)可以得出,超螺旋滑模观测器在符号函数前加入了连续项以及将符号函数放入高阶倒数中,从而很大程度上缓解了滑模抖振问题。
为证明STA-SMO稳定性,选取一种类二次型 Lyapunov 函数。证明过程如下:
VSTA=δTPδ
(28)

对δ求导可得:
(29)
对VSTA进行求导可得:
(30)

(31)
其中:λ是有关于增益k1、k2和矩阵Q的常数。综上,STA-SMO是稳定的。

Df=v
(32)
对式(32)展开可得重构的永磁体磁链值为
(33)
超螺旋滑模观测器仿真模型如图3所示。

图3 STA-SMO仿真模型Fig.3 STA-SMO simulation model
3 实验结果与分析
3.1 仿真验证
自适应超螺旋滑模磁链观测的永磁同步电机控制系统如图4所示,仿真电机参数如表1所示。
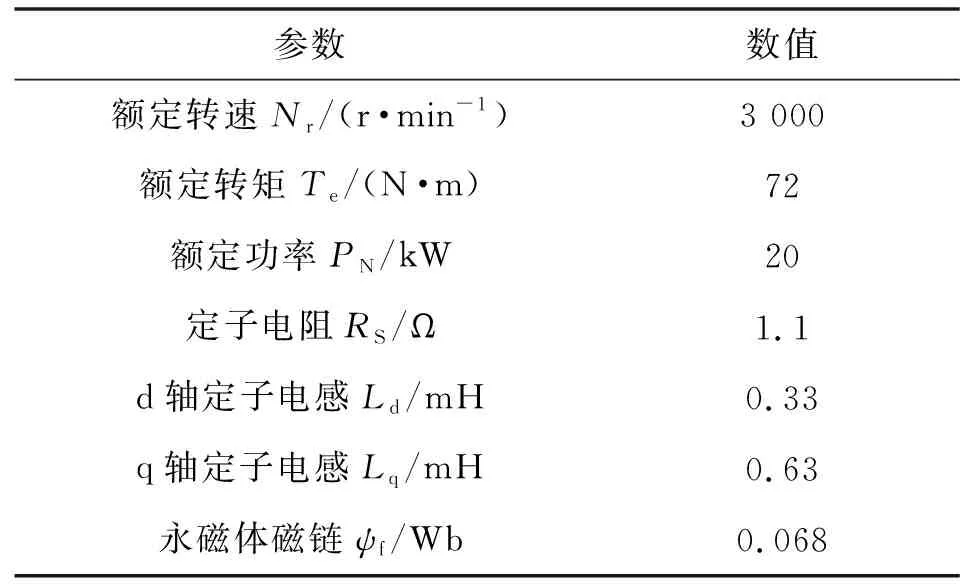
表1 IPMSM参数Tab.1 IPMSM parameters

图4 自适应超螺旋滑模磁链观测的永磁同步电机控制Fig.4 Control of permanent magnet synchronous motor with adaptive super-twisting sliding-mode flux observation
为了验证自适应超螺旋滑模观测器观测永磁磁链的准确性和稳定性,同时与传统滑模磁链观测器进行对比,设置如下2种仿真条件。
(1)考虑电阻不发生变化时仿真
设置仿真时间为3 s,电机以额定转速、半载启动,考虑电机在1 s时发生失磁故障,磁链降低10%,此时永磁磁链为0.062 Wb。为了更好地验证观测器鲁棒性,在2 s时负载转矩增加至满载。电阻参数不变时永磁磁链观测效果如图5所示,可知:在电阻参数未改变、电机发生失磁故障时,传统滑模磁链观测器与自适应超螺旋滑模磁链观测器均能准确跟踪永磁磁链给定值,且突增负载后对观测效果无影响,具有较强抗干扰性;但自适应超螺旋滑模磁链观测器响应速度更快且无抖振,有利于系统的稳定性。
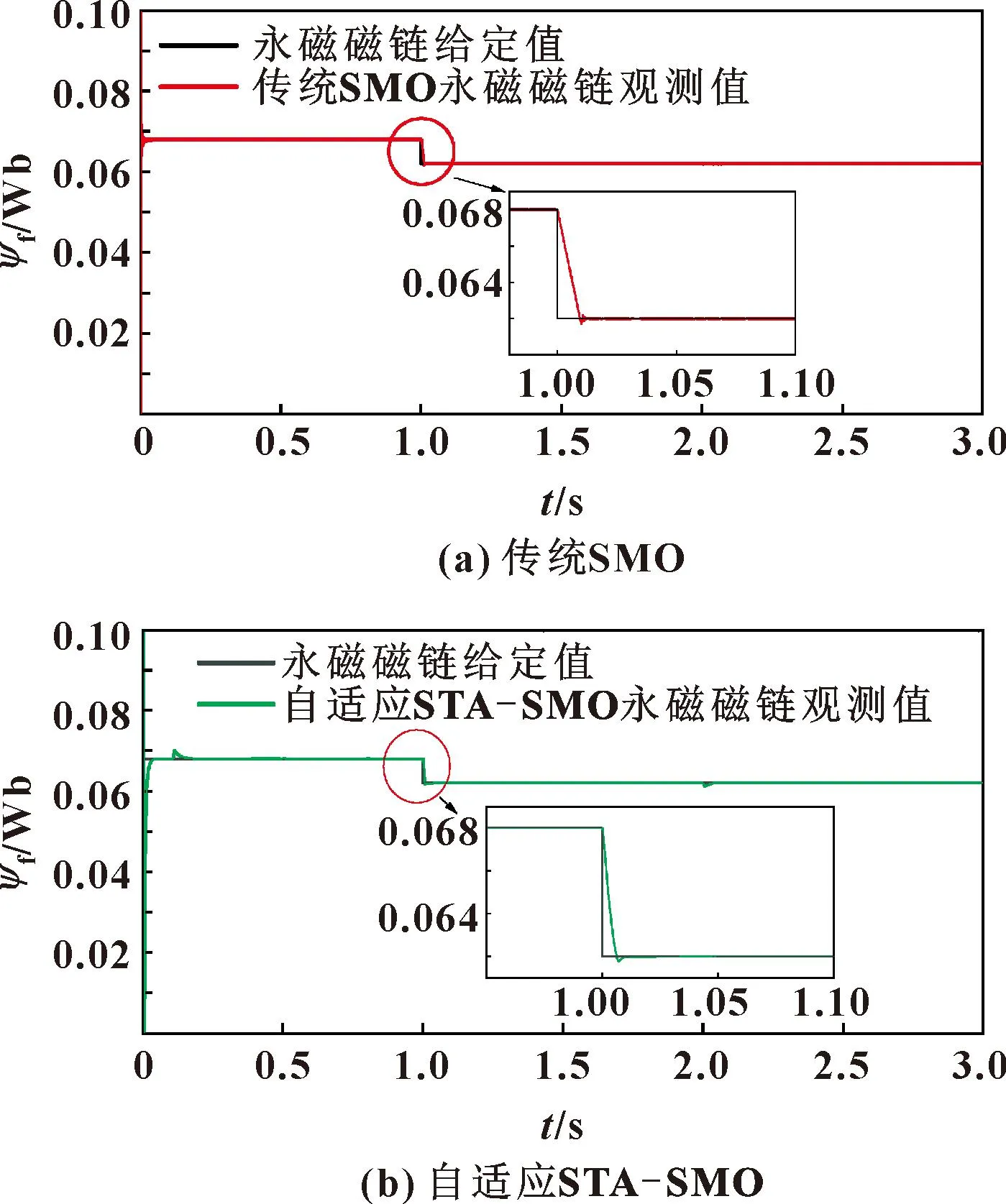
图5 电阻参数不变时永磁磁链观测效果Fig.5 Observation effect of permanent magnet flux linkage with constant resistance parameters:(a) traditional SMO;(b)adaptive STA-SMO
(2)电阻参数发生改变时仿真
设置电机电阻参数在1.5 s时发生改变,增大至原值2倍为2.2 Ω,其余仿真条件与(1)相同。电阻参数改变时永磁磁链观测效果如图6所示,从图6(a)可知:在1.5 s后电阻参数发生改变时,传统滑模磁链观测器未能跟踪给定永磁磁链值,且在2 s后由于转矩增大导致观测值与给定值偏差更大。而在图6(b)中,在电阻参数发生改变时,采用自适应超螺旋滑模磁链的观测器能快速准确跟踪给定值,提高了永磁磁链观测的稳定性。图6(c)为电阻观测效果,当1.5 s电阻发生改变时,所设计观测器能迅速观测到电机实际电阻值。

图6 电阻参数改变时永磁磁链观测效果Fig.6 Observation effect of permanent magnet flux linkage with variation resistance parameters:(a) traditional SMO;(b)adaptive STA-SMO;(c) resistance observation
3.2 在环平台验证
为了验证上述方法的可行性,借助MS320F28335型DSP为核心的硬件在环实物平台验证。硬件在环实物平台使用电机参数如表2所示。
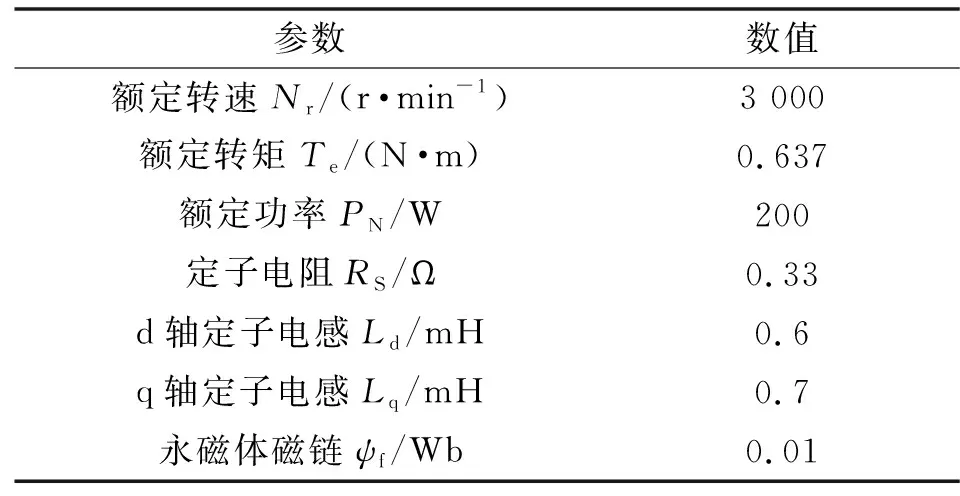
表2 实物电机参数Tab.2 Physical motor parameters
硬件在环仿真平台如图7所示,仿真模型如图8所示。
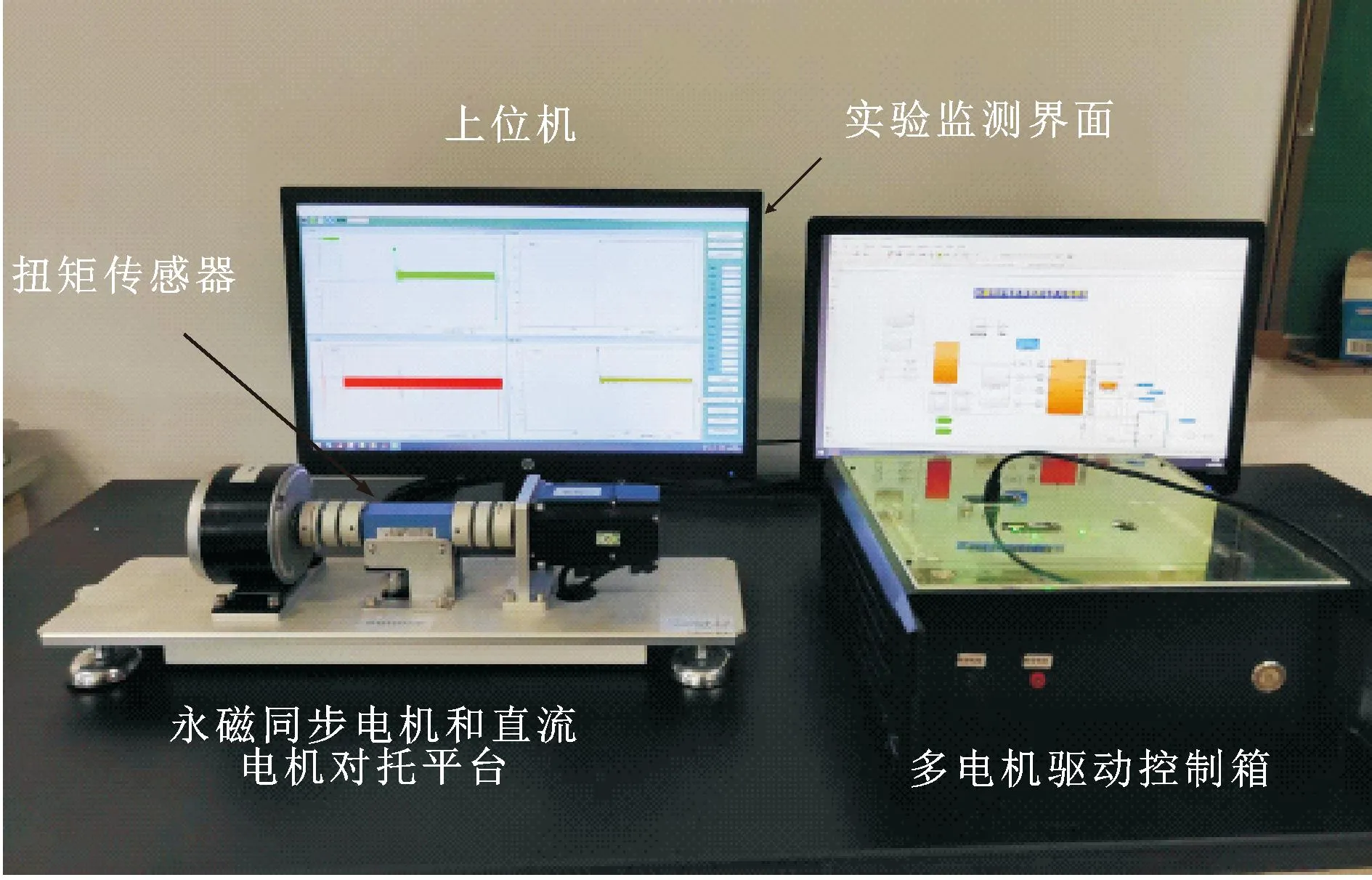
图7 硬件在环实物仿真实验平台Fig.7 Hardware in the loop physical simulation experiment platform
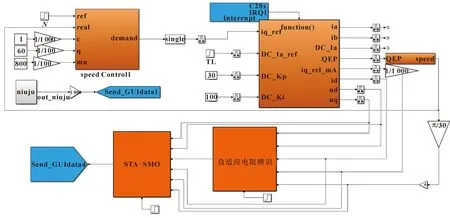
图8 硬件在环实物仿真模型Fig.8 Hardware in the loop physical simulation model
由于在实物电机中难以模拟失磁故障,且正常状态下电阻值不会发生改变,文中仅考虑电机正常工作情况下2种方法的永磁磁链观察效果。同时通过更改磁链观测器中电阻参数值而达到观测电阻对于永磁磁链的影响效果。此硬件在环仿真平台上电前2 s自动复位,判断转子绝对位置,以消除初始电角度偏差,因此仿真从3 s开始进行。
为验证所设计观测器观测结果的抗干扰性与准确性,设置实验条件为:电机1/3额定转速带载启动,在4 s时突增负载至0.3 N·m,4.5 s时恢复至0.15 N·m,5 s时设置转速上升至1 500 r/min,总实验时间为6 s。考虑电机复位时间,电机在3 s时启动,电机启动转速响应如图9所示,负载转矩响应如图10所示,图11所示为电阻参数不变时永磁磁链观测效果。对比图11(a)(b)可明显看出:在电阻参数未发生改变,且电机突增负载时,永磁磁链出现下降趋势为1%,而传统SMO与自适应STA-SMO均能准确跟踪永磁磁链给定值,但自适应STA-SMO几乎无抖振,观测效果更加清晰。在转速发生变化后,所设计观测器在0.2 s后的观测结果达到稳定值。图11(c)为电阻观测效果,可知:所设计电阻观测器能准确辨识电阻真实值,辨识误差在0.1%左右。
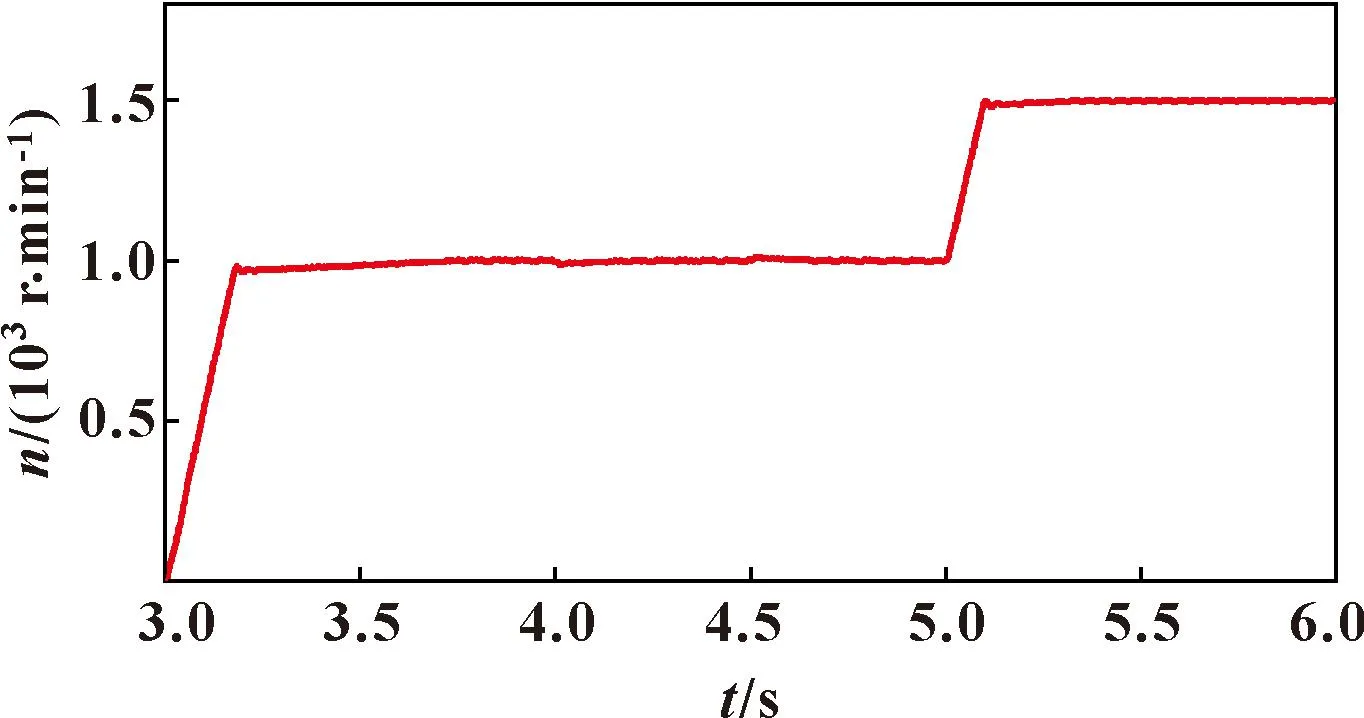
图9 转速响应曲线Fig.9 Speed response curve
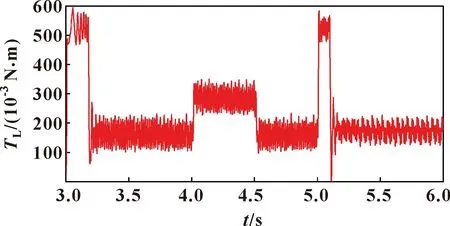
图10 负载转矩响应曲线Fig.10 Load torque response curve
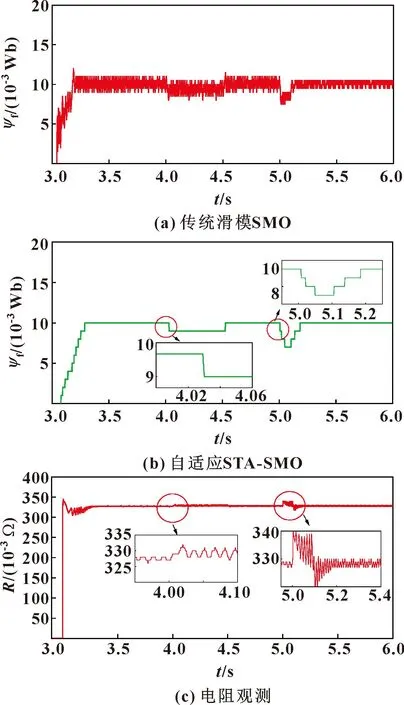
图11 电阻参数不变时永磁磁链观测效果Fig.11 Observation effect of permanent magnet flux linkage with constant resistance parameters:(a)traditional SMO;(b)adaptive STA-SMO;(c)resistance observation
由于实物电机电阻值难以改变,在实验过程中改变式(4)中电阻值来达到电阻参数变化对于永磁磁链观测效果。设置4 s时,式(4)中电阻值降低50%为0.165 Ω,在5.5 s时接入自适应电阻观测值,电阻参数变化时永磁磁链观测效果如图12所示。可知:在4 s电阻参数发生变动的情况下,永磁磁链观测值偏离实际值;5 s时由于负载转矩增大,导致观测结果与实际值偏差进一步扩大;但在5.5 s引入自适应电阻观测值后,永磁磁链观测值迅速收敛至实际值。
从上述实验中可以得出:若所设计观测器未考虑电阻参数变化,则永磁磁链观测结果在电阻参数发生改变时不能进行准确辨识,辨识结果偏离实际值。
4 结语
文中采用IPMSM失磁状态下的状态方程模型与自适应超螺旋滑模变结构相结合的方式,推导定子电阻自适应律,设计永磁磁链观测器,通过验证得出以下结论:
(1)当电阻参数未发生改变时,传统SMO与自适应STA-SMO均能准确辨识磁链值,但自适应STA-SMO几乎无抖振,观测效果清晰,且收敛速度快。
(2)当电阻参数发生改变时,传统SMO观测效果偏离真实值,不能满足精确地观测永磁磁链,而自适应STA-SMO可以准确观测永磁磁链变化。
猜你喜欢
科学技术与工程(2023年28期)2023-10-14 08:46:30
大电机技术(2022年5期)2022-11-17 08:13:02
中国生物制品学杂志(2022年10期)2022-10-25 05:06:38
湖南电力(2022年3期)2022-07-07 08:58:16
中国特种设备安全(2021年7期)2022-01-19 05:07:34
四川轻化工大学学报(自然科学版)(2021年3期)2021-08-30 06:37:00
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
中山大学学报(自然科学版)(中英文)(2015年6期)2015-06-06 10:43:32