
车队协同驾驶的车辆模型预测控制研究
2024-01-11 09:45:36冯挽强罗茶根张周平陈志伟涂培培
时代汽车 2023年23期
关键词:控制算法
冯挽强 罗茶根 张周平 陈志伟 涂培培

摘 要:随着科技的不断发展,自动驾驶技术已经成为了当前汽车行业的研究热点。其中,协同驾驶作为自动驾驶的一个重要分支,其目标是实现多辆车之间的信息共享和协同控制,以降低能耗、提高道路利用率和行驶安全性。然而,由于车辆间的通信延迟、不确定性以及环境复杂性等因素,协同驾驶的车队模型预测控制算法还存在很多难点与挑战。本文将对车队协同驾驶的车队模型预测控制算法进行研究,得出一种车队协同驾驶的车队模型预测控制算法。
关键词:协同驾驶 模型预测 控制算法
1 概述
对于货车、卡车等行驶轨迹相对固定的物流车而言,其高速行驶场景具备常见性,因此物流车高速场景有可能将成为最先实现的自动驾驶应用场景之一。协同驾驶,也称为协同式自动驾驶,是自动驾驶的一个重要分支,其核心思想是在一定的区域内,多辆车通过共享信息并协同控制。协同驾驶的能明显提高道路利用率和行驶安全性,除此之外,还能够直接減低能源消耗,带来可观的经济效益和社会效益。由车辆动力学方程可知,车辆车速超过80公里/小时,超过一半的驱动功率用于克服空气阻力,商用车采用编队行驶有利于减少空气阻力降低能耗。研究表明,无人驾驶商用车辆如果采用车辆编队方式行驶,可以降低约20%的车队整体能源消耗。对于物流行业来说,车队协同驾驶无疑是一个巨大的节能减排技术突破口。在目前“碳达峰、碳中和”的政策大环境下,车队协同驾驶自然而然成为自动驾驶的研究热点之一。
协同驾驶的实现,需要依赖先进智能网联技术,包含通信技术、传感器技术、决策控制技术等。由于车辆间的通信延迟、行驶意图的不确定性以及环境复杂性等因素,协同驾驶的车队模型预测控制算法还存在很多难点与挑战。本文针对协同驾驶的车队模型,进行预测控制算法研究,并行了仿真分析,得出一种车队协同驾驶的车队模型预测控制算法。
2 协同驾驶的车辆模型预测控制算法
TruckSim是一款专门用于模拟多轴商用车和军用车辆性能的软件,该软件具有直观的用户界面和强大的分析工具,使用户可以构建复杂的场景并测试事件序列。TruckSim支持软件在环、模型在环、硬件在环和驾驶员在环等模拟模式,优点是其动力学模型搭建过程简单,并可以通过参数化配置整车参数。本文在仿真软件Trucksim中建立单车动力学模型,单车的整车参数选取为见表1。
常见的车队通信拓扑结构如下:
(1)前车跟随式:每辆车只接收前面一辆车的信息;
(2)前车-首车跟随式:每辆车接收前面一辆车和首车的信息;
(3)双向跟随式:每辆车接收前车和后车的信息;
(4)双向-首车跟随式:每辆车接收前车、后车和首车的信息;
(5)双前车跟随式:每辆车接收前面两辆车的信息;
(6)双前车-首车跟随式:每辆车接收前面两辆车和首车的信息
以上车队通信拓扑结构中,前车-首车跟随式在保证系统稳定性和安全性的同时有利于控制器的设计,故本文采用前车-首车跟随模式。车队运动学模型设置为在高速公路直道上从左至右同向行驶,第一辆车为领航首车,后车与前车期望间距为10米,车队中包含首车一共有5台车。
根据车辆几何运动学相关理论,在车队首车和后续车都处于平坦路面跟车状态且可认为在瞬时的速度变化是连续的前提下,我们可以简单得到关于车队行驶的三阶状态空间方程,如式(1)所示:
式(1)中,S为车辆行驶纵向位移、V为车辆速度、α为车辆加速度,CD为空气阻力系数,是当前速度下的惯性常数,matarget则是车辆的期望加速度。
在该控制系统内,通过反馈线性化不难得出,该控制系统与实际加速度的关系如式(2)所示:
式(2)中,K为惯性环节系统增益,τ为惯性环节时间常数。
通过联立两车间距物理模型,不难得出车队两车之间的误差模型,如式(3)所示:
式(3)中,es为位移误差,ev为速度误差,S1为前车位移,S2为后车位移,dsafe为两车最小安全距离,l为车长,对以上公式进行微分,可得到新的误差模型,如式(4)所示:
式(4)中,c和μ为间距设定系数。
通过离散化和线性化,并通过前向欧拉差值,我们可以获得车队的模型预测控制状态空间方程,如式(5)所示:
n为状态量数,取为4;m为控制量数,取为1;所以其中是=
根据状态空间的凸特性,我们可以构造二次性目标函数,本文构造的车队的目标函数如式(6)所示:
式(6)中,为当前时刻输出测量值,为输出量的参考值,即间距误差和速度误差参考值,取为0;Q为误差加权矩阵,反映对不同时刻逼近精度的比重程度;R为输入加权矩阵,防止控制量过于剧烈变化;简化后可得标准二次型目标函数,如式(7)所示:
至此,车队协同驾驶的车辆预测控制模型建立完毕,下面进行仿真分析。
3 仿真分析
本文的仿真分析包括直道加减速和换道两种工况。
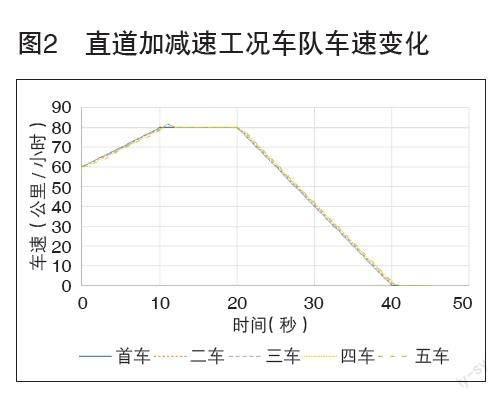
直道加减速工况:设置首车初始车速为60公里/小时,10秒内加速至80公里/小时,保持行驶10秒后,在20秒内从80公里/小时降至0公里/小时,仿真时间为50秒,仿真结果如图1所示。
图1的仿真结果表明:首车在0秒开始加速时,车队后续车辆可以及时跟随首车做出加速响应,车队后续车辆跟随首车速度依次存在一些延迟,车队整体响应延迟时间在0.4秒以内,车速最大偏差在2公里/小时以内;首车在10秒时加速完毕,车速达到80公里/小时,车队后续车辆跟随首车速度在2秒达到一致,车队后续车辆跟随首车速度依次存在一些延迟,且后续车辆车速存在2公里以内的超调,车队整体响应延迟时间在2秒以内;首车在20秒时开始减速,车队后续车辆可以及时跟随首车做出减速响应,车队后续车辆跟随首车速度依次存在一些延迟,车队整体响应延迟时间在0.5秒以内,车速最大偏差在2公里/小时以内;首车在40秒时减速完毕,车速降至0公里/小时,车队后续车辆跟随首车速度在2秒达到一致,车队后续车辆跟随首车速度依次存在一些延迟,车队整体存在2秒以内响应延迟时间。整个仿真过程中,车队后续车辆车速依据距离首车远近依次存在一些延迟,最终车速能随首车收敛一致。
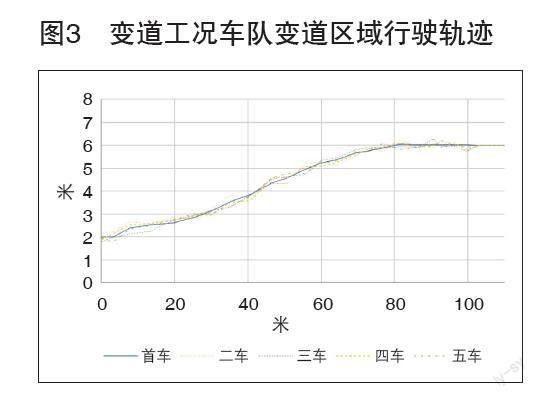
換道工况:设置车队初始车速60公里,首车车速不变向左变道,首车行驶轨迹为给定轨迹,后续车辆不做同时变道响应,期望行驶轨迹为跟随首车轨迹在同一区域变道。变道区域长度100米,宽度8米,仿真结果如图3所示。
图2中的曲线,是将整个车队通过变道区域时每台车辆的行驶轨迹叠加到一起得到。图2中,横坐标为车辆通过变道区域时车辆行驶轨迹的沿着行驶方向的坐标值,纵坐标为车辆通过变道区域时垂直于行驶方向的坐标值。仿真结果表明:在变道区域,车队随首车行驶轨迹变道,车队后续车辆的行驶轨迹与首车存在偏差,且偏差值与后续车辆在车队中位置没有明显依次增大关系。在通过沿行驶方向的同样位置时,沿垂直于行驶方向的最大误差在0.3米以内,车队后续车辆行驶轨迹沿首车轨迹的跟随性较好,车队后续车辆最终行驶轨迹能随首车行驶轨迹收敛一致。
4 总结
本文对车辆协同驾驶的车队模型预测控制算法进行研究,并进行了仿真分析。仿真分析结果表明,在直道加减速工况和换道工况下,车队的车速和行驶轨迹能跟随首车车速和行驶轨迹变化,误差较小,最后能随首车的车速和轨迹收敛。因此,本文的车队车辆协同驾驶的模型预测算法有效,可以为车队协同驾驶提供一定的理论支持。未来的研究中可以增加更多的车联运行工况,如车队加入切入车辆作为干扰车辆,对更复杂的交通环境进行研究分析,也更加贴合实际车队实际行驶运行环境。
车队协同驾驶技术的落地,在技术突破的同时,也需要政策层面的支持。例如,交通法规对于高速路上车队行驶间距的要求是大于10米的,要推动车队协同驾驶落地,需要制定相关的法规和标准,在保证车辆的安全性和环保性的同时满足制度合规性;需要建设协同驾驶相应的基础设施,如高精度地图、通信网络等,以满足车辆的协同驾驶的软硬件技术需求。
参考文献:
[1]Salari K,Sreenivas K,Taylor L. DOEs Effort to Reduce Truck Aerodynamic Drag through Joint Experiments and Computations[J].IEEE Transactions on Vehicular Technology,2005.
[2]Jennifer Chu,Sertac Karaman. Analysis finds autonomous trucks that drive in packs could save time and fuel [EB/OL]. December 20,2016[March 16,2022].https://news.mit.edu/2016/driverless-truck-platoons-save-time-fuel-1221.
[3]郭孔辉.非结构环境下智能车辆自主跟随前车控制方法研究[D].北京理工大学,2017.
[4]靳林岳.自动驾驶车队协同控制策略研究[D].北京交通大学,2022.
[5]张荣辉,游峰,初鑫男,等.车-车协同下无人驾驶车辆的换道汇入控制方法[J]. 中国公路学报,2018,31(4).
猜你喜欢
纺织科学研究(2020年1期)2020-05-21 00:30:58
电镀与环保(2018年2期)2018-04-19 02:05:05
制造技术与机床(2017年6期)2018-01-19 02:41:07
江西理工大学学报(2015年3期)2015-12-22 05:26:24
计算机工程(2015年8期)2015-07-03 12:19:56
电源技术(2015年9期)2015-06-05 09:36:06
电测与仪表(2014年14期)2014-04-04 11:53:30
电视技术(2014年19期)2014-03-11 15:37:52
单片机与嵌入式系统应用(2014年9期)2014-03-11 15:35:07
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
