实孔径毫米波雷达的边坡变形监测能力分析
2024-01-11 13:56朱劲,王剑锋,陈垦,唐勇,李天斌
人民长江 2023年12期
朱 劲,王 剑 锋,陈 垦,唐 勇,李 天 斌
(1.蜀道投资集团有限责任公司,四川 成都 610041; 2.成都理工大学 环境与土木工程学院,四川 成都 610059; 3.成都理工大学 地质灾害防治与地质环境国家重点实验室,四川 成都 610059; 4.四川数字交通科技股份有限公司,四川 成都 610041; 5.四川蜀道新材料科技集团股份有限公司,四川 成都 610041)
0 引 言
随着西部大开发的深入推进,川西高原梯度带范围内涌现了大量的工程活动,如水电站、高速公路、矿山等,由于该区域地质构造复杂且受到强烈的河谷下切作用,使得该区域滑坡灾害异常发育(据不完全统计,仅川西高原梯度带范围内就分布了17 000余处地质灾害),对人民生命财产安全造成重大威胁[1-2],如2022年7月5日的通化1号隧道发生山体滑坡,造成交通线路临时中断。如果能在地质灾害发生前了解灾害体的变形特征,将有效避免灾害对人民生命财产安全造成的损失。
滑坡预防主要是根据现代化监测设备[3],监测导致滑坡发生的相关因素,根据相关因素量化关系,判断滑坡体的发展趋势,为滑坡的时空预测及后期支护处置措施提供数据基础[4-5]。目前常见的滑坡监测指标较多,如坡表位移[6-8]、深部位移、后缘拉裂缝宽度、雨量等。其中,坡表位移是边坡灾害监测预警[9]的关键。目前常用的坡表变形监测手段较多[10-12],相关学者也对其进行了研究,如丁辉[13]对比了合成孔径边坡雷达和真实孔径边坡雷达的边坡变形监测差异;潘军道等[14]采用北斗卫星导航系统(BDS)对基坑围墙位移进行了监测,获得较好结果;刘韬[15]对GNSS技术在滑坡监测中的应用进行了研究,探讨了GNSS的边坡监测布设原则。董建春等[16]探讨了三维激光扫描技术在矿山边坡变形监测中的应用,并获取了较理想的结果。
实孔径毫米波雷达(RAR)是毫米波雷达[17-18]的一种类型,自1980年在石家庄市召开的国内第一次关于毫米波雷达的会议开始,便在中国多个领域得到快速发展,尤其在无人驾驶方面更是得到空前应用,但在边坡变形监测领域研究较少[19-20]。实孔径毫米波雷达具有测距、测速和测角3个方面的功能,其测距的功能使实孔径毫米波雷达具有对边坡变形进行监测的可行性。另一方面,与传统监测手段相比,实孔径毫米波雷达具有精度高(高精测距精度为2~3 mm;相位模式精度为0.1 mm)、全天候实时监测、人工需求小、采集频率高(100 ms采集一次)、易于维护(多对实孔径毫米波雷达进行维护时,实孔径毫米波雷达通常布设在开阔的场景中,具有良好的人机可达性)等优点。需说明的是:基于相位模式仅能获取前后两次采集时间的相对变形,当监测设备由于供电不足而中断采集时,未采集时段的变形将会以误差形式累积;而高精测距由于获取的是距离信息,不会有上述误差的累积,更适用由太阳能供电的山区环境中。故本文将开展高精测距下实孔径毫米波雷达(RAR)的变形监测模拟试验,并初步探索了基于实孔径毫米波雷达的三维坐标解译原理,为后续实孔径毫米波雷达(RAR)在滑坡灾害中的深入应用提供一些借鉴。
1 实孔径毫米波雷达测距及三维坐标解译
1.1 实孔径毫米波雷达高精测距原理
实孔径毫米波雷达测距是通过发射信号,并通过接收物体反射的回波信号来计算实孔径毫米波雷达到物体的距离。设往返所用时间τ,其值等于雷达与物体间径向距离d的2倍除以光速c,即
(1)
结合图1,FMCW毫米波调制扫频周期为Tc,扫频带宽为B,FMCW信号的发射斜率k可以表示为
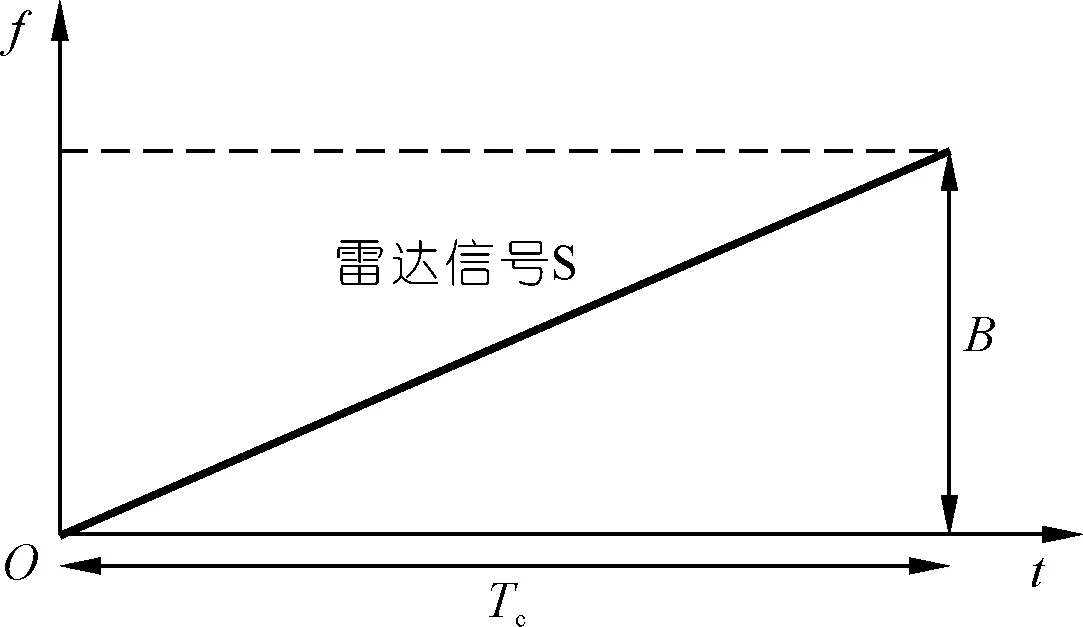
图1 FMCW毫米波扫频周期及扫频带宽Fig.1 FMCW millimeter wave sweep period and sweep bandwidth
(2)
当雷达前方存在单个物体时,混频器生成具有恒定频率的IF信号,其信号频率fτ等于时间τ乘以发射信号的斜率k。结合式(2),IF信号频率fτ可以表示为
(3)
则雷达与目标的径向距离可表示为
(4)
1.2 测距精度
本文所使用的实孔径毫米波雷达测距采用双频比相测距原理,其理论测距精度计算公式为
(5)
式中:c为光速,约为3×108m/s;Δf为双频测距时所使用的频差;SNR标为快速傅里叶变换(FFT)后的比相输出信噪比。本文所使用的产品频差为1.7 GHz,信噪比约25~30 dB。
将本文所使用产品的参数代入式(5)可计算得到产品的距离精度为2.56~2.81 mm,根据DB11/T 1677-2019《地质灾害监测技术规范》中对滑坡监测精度(见表1)的要求可知,符合滑坡变形测量的精度要求。

表1 滑坡监测精度Tab.1 Landslide monitoring accuracy mm
1.3 三维坐标解译原理
目前常采用的三维坐标解译原理有:① 根据3个球体求解3个交点的方法进行获取;② 根据测量距离与坐标系的夹角关系进行投影求解。第一类方法常用于GNSS的监测体系中,但易出现偏移效应,其偏移量与空间距离有关,目前已有工作经验表明:其偏移量会达到100 mm以上,有时会出现1 m以上。另一方面,基于3个球体求解三维易出现虚根的情况。第二类方案,虽不会出现偏移及虚根的情况,但从理论上讲,该方案获取的解为“假三维”,由于雷达监测变形皆为获取的径向变形,通过径向变形直接投影获取三维,忽略了径向变形与空间变形之间的关系。基于此,本文提出“向量合成”解译三维坐标的方法,具体计算过程如下:
(1) 假定3台雷达分别监测到的变形为Δl1、Δl2、Δl3,同时拟定角反和3台雷达的初始坐标:O点-角反(x0,y0,z0),A点-雷达1(x1,y1,z1),B点-雷达2(x2,y2,z2),C点-雷达3(x3,y3,z3)。
(2) 计算3台雷达到角反的距离。
(6)
(7)
(8)
(3) 计算各台雷达相对于角反的单位方向向量,即:
(9)
(10)
(11)
(4) 根据变形量及单位方向向量计算变形的空间向量,即
(12)

(13)
(6) 根据雷达1监测到与角反的初始距离D1和计算时刻距离D2及夹角θ即可解出角反的空间变形Δl,根据三角余弦定理有:
(14)
(15)
2 模拟测试方案
2.1 实孔径毫米波雷达监测体系
实孔径毫米波雷达监测体系是由实孔径毫米波雷达和角反射体组成,通过实孔径毫米波雷达发射信号,探测安装在边坡体上的角反射体位置变化情况,以此来推断滑坡体的变形信息。
(1) 实孔径毫米波雷达。实孔径毫米波雷达是基于真实孔径雷达技术,监测地质灾害体上角反射体的位置变化情况,目前常用的实孔径毫米波雷达纵向探测距离约为500 m,与本轮测试所使用的产品一致(见图2),其工作频段为80 GHz,横向最大探测距离150 m,数据采集频率为每秒10次,形变监测精度为2.56~2.81 mm;水平波速宽度为40°;俯仰波束宽度为10°。

图2 实孔径毫米波雷达主体Fig.2 Real aperture millimeter wave radar body
(2) 角反射体。角反射体采用八面角反(见图3)。需强调的是,角反具有形态,其形态决定了其具有强反射点和弱反射点,当雷达与强反射点对视时,其监测效果较好,当雷达远离强反射点时,易造成角反射体的跟踪丢失,导致监测失效。因此角反射体的布设姿态将会对雷达的监测效果造成严重影响。因此在实际测试过程中,应注意调节角反资料,以获取良好的监测结果。
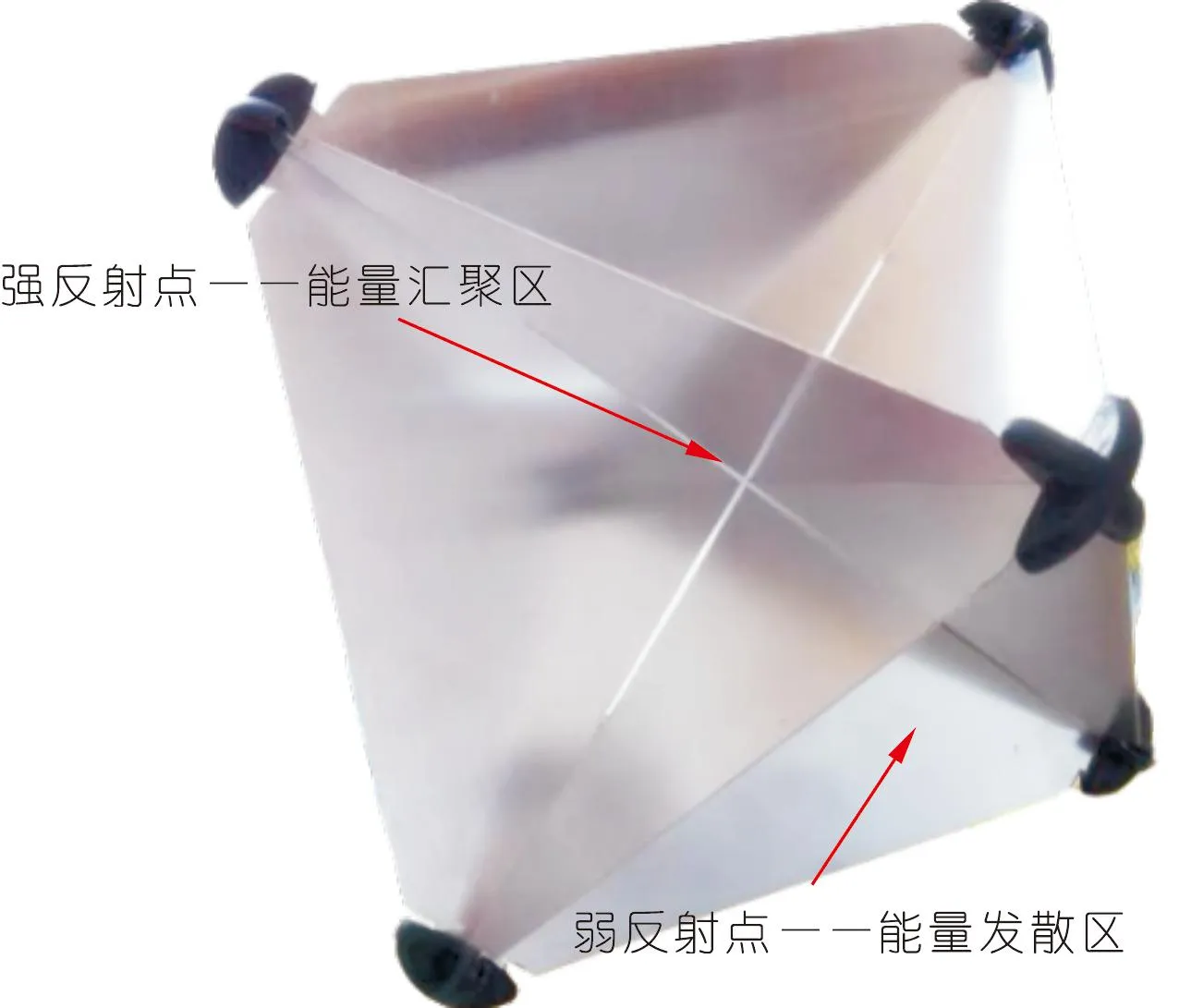
图3 八面角反Fig.3 Octahedral corner reflector
2.2 滑动模拟装置
滑动装置选取合理与否是验证实孔径毫米波雷达的变形监测性能的关键,滑动装置需有以下3个特点:① 具备慢速运动的特点,可模拟边坡的蠕变效应,并检验毫米波能否准确反映其蠕变效应;② 具备变速的特点(自然滑坡的变形速率总是变化的),可验证实孔径毫米波雷达能否监测不同速度下的变形趋势,同时也为后期将实孔径毫米波雷达监测到的变形数据用于预警模型研究建立数据基础;③ 具备测距的需求,能反馈出滑动装置的变化距离,以此判定实孔径毫米波雷达的变形监测结果是否合理。因此,选取摄影滑轨作为变形模拟装置(见图4)。

图4 摄影滑轨效果Fig.4 Photography slide
2.3 模拟测试的实施
由于在实际变形监测中,实孔径毫米波雷达与角反射体通常会存在较大的空间距离,室内试验无法满足这样的距离需求,因此选取开阔的野外试验基地,根据实际情况,选取蜀道集团都江堰车路协同试验基地中心开展相关试验。为对实孔径毫米波雷达边坡监测覆盖范围及三维坐标解译进行研究,本文选取两组工况。
工况1拟开展实孔径毫米波雷达监测覆盖范围研究,整体布设见图5,其中布设1台雷达和3个角反,安装周边环境概况见图6,空间坐标关系见表2。

表2 实孔径毫米波雷达与角反的WGS84空间坐标信息Tab.2 WGS84 spatial coordinate of RAR and Octahedral corner reflector

图5 工况1实孔径毫米波雷达监测布设平面Fig.5 Condition 1 layout plane of RAR monitoring

图6 工况1安装周边环境概况Fig.6 Condition 1 surrounding environment
工况2整体布设3台雷达、2个角反,分别以不同运动状态运动,验证实孔径毫米波雷达监测多个运动状态的变形能力及后续三维坐标解译原理的可靠性。实孔径毫米波雷达及3台滑轨的安装位置平面布设见图7,安装周边环境见图8,具体WGS84坐标见表2。

图7 工况2实孔径毫米波雷达监测布设平面Fig.7 Condition 2 layout plane of RAR monitoring

图8 工况2安装周边环境Fig.8 Condition 2 surrounding environment
3 测试数据分析
3.1 工况1数据分析
本节将对上文变形模拟监测试验工况1的结果进行分析,具体雷达监测到的角反1、角反2及角反3的距离及变形信息见图9~11(整体模拟时长约1 h)。其中局部放大图主要体现实孔径毫米波雷达的局部波动。
注:为使变形趋势符合边坡变形规律,将距离信息的纵坐标翻传(下同)。图9 工况1-角反1距离及变形信息Fig.9 Distance and deformation of octahedral corner reflector 1 under condition 1
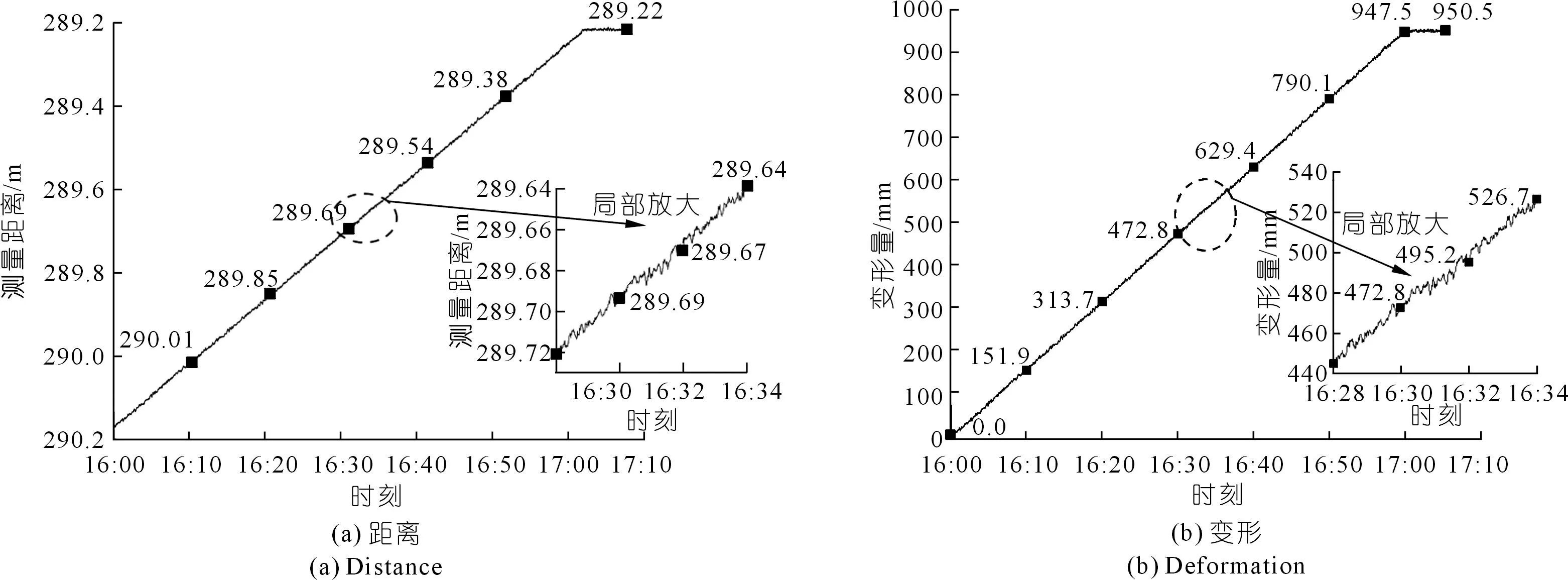
从图9可以看出:角反1仅做了单边的匀速运动,其中变形量最大约为950 mm,实际上模拟过程中,角反1也做匀速运动,其监测曲线趋势的变化情况完全能反映出实际特征,具有较高的可靠性,从局部放大图中可以看出,其监测曲线在局部会有波动,波动量整体在10~20 mm不等。造成波动的原因主要包括滑轨振动、风扰动等,因此数据展现为锯齿状,当进行移动均值
化处理后即可消除这类噪音,不影响数据整体趋势判断。
从图10可以看出,角反2整体做变速运动至摄影滑轨的顶点,在顶点短暂停留后快速回到原点,图10(a)中的曲线特征也能反映出实际情况,前期速度变化振荡上行,在运行至顶点后,快速返回至原点,整体变形量约为950 mm,与角反1相当,在局部放大图中也可以看见类似局部波动的规律。当角反返回至原点时,实孔径毫米波雷达监测到的变形为-3.1 mm(理论上该值为0),取末尾十位数的平均值,该值即可代表实孔径毫米波雷达的误差,角反2的末尾十位数平均值为-4.68 mm,即误差为-4.68 mm。
从图11可以看出,角反3在前期模拟经典的滑坡位移曲线,当运行至顶点后,停留一定时间(其主要目的是为了判识实孔径毫米波雷达能否识别这一过程),随后快速回到原点,从图11中的距离变化曲线和变形曲线都能够诠释这一特征,表明实孔径毫米波雷达具有变形监测的能力。同理根据角反2的处理误差的形式,角反3的误差为6.39 mm。
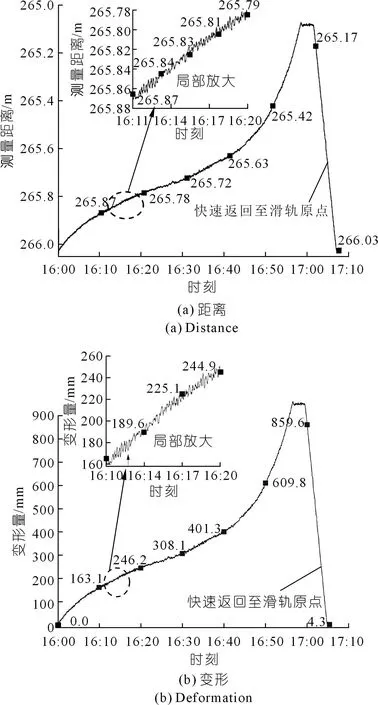
图11 工况1-角反3距离及变形信息Fig.11 Distance and deformation of octahedral corner reflector 3 under condition 1
结合图9~11的监测成果及前文实孔径毫米波雷达的布设图,可以整体表明:① 毫米波具有径向变形的监测能力,其误差整体在5 mm左右,在局部会出现10~20 mm的波动,可能是由于风或滑轨的振动干扰造成;② 实孔径毫米波雷达在横向的监测覆盖范围约200 m。
3.2 工况2数据分析
工况1已对实孔径毫米波雷达监测的径向变形能力进行了分析。实际上实孔径毫米波雷达能否应用于边坡变形监测中的关键是能否获取可靠的三维变形信息,为后期边坡体的支护处置提供数据支撑。本小节将对实孔径毫米波雷达的三维变形解译原理进行验证。实际安装工况及角反1和角反2的运动方向见图7和图8。为了解实孔径毫米波雷达监测不同运动状态的能力,角反1模拟坡体的变形特征,角反2做匀速往返运动,滑轨单边运行总长度为970 mm,具体监测的径向变形及空间解译位移见图12和图13。3台实孔径毫米波雷达监测到的径向变形除变形大小不同外,其趋势及转换点基本一致。同时角反1和角反2的变形速率特征与实际角反运行情况完全吻合,表明实孔径毫米波雷达监测结果合理。

图12 工况2-角反1的变形及空间三维位移信息Fig.12 Deformation and spatial three-dimensional displacement of octahedral corner reflector 1 under condition 2
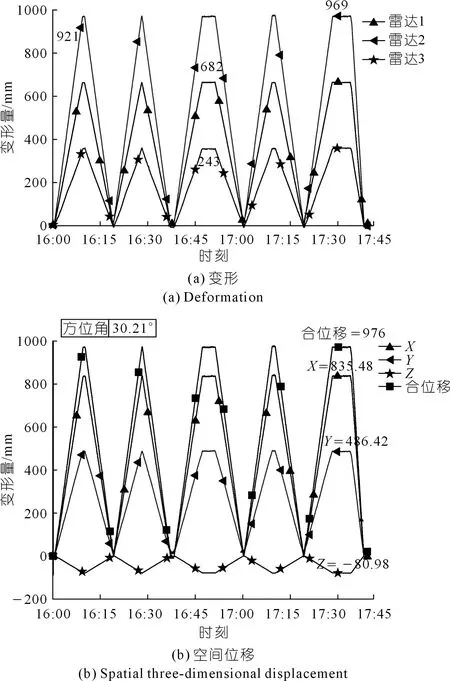
图13 工况2-角反2的变形及空间三维位移信息Fig.13 Deformation and spatial three-dimensional displacement of octahedral corner reflector 2 under condition 2
从图12(a)中可以看出3台实孔径毫米波雷达所能监测到的径向变形最大为938 mm,实际滑轨运行总长为970 mm。另一方面仅依靠径向变形无法了解滑坡的运动状态,比如方位角无法获取,导致后期设计支护措施时,出现严重问题。因此采用2.3节的三维解译原理对实孔径毫米波雷达监测到的径向变形进行解译,从图12(b)中可知三维解译后的合位移最大为979 mm,与实际滑轨变形970 mm仅相差9 mm,误差比约1%。其误差可能由于风干扰或滑轨振动造成的,整体看满足边坡变形监测的需求。另一方面注意到:X值为744.54 mm,Y值为634.51 mm,Z值为-60.57 mm,方位角为40.44°。从图8中可以看出基本上符合实际角反1的运动概况。
从图13中角反2的变形信息及三维位移解译概况亦可得到上述结论,其中角反2的方位角解译为30.21°,比角反1略小,这点在图8中可以得到验证,证明了三维解译原理的可行性。
4 典型工程应用研究
4.1 汶马高速(K231边坡)
该滑坡位于四川省阿坝州理县米亚罗镇大郎坝村来苏河右岸,里程桩号为K172+100~K172+250,长度约为150 m。由于实孔径毫米波雷达布设需要满足通视条件,从图14中可以看见右侧存在植被遮挡区,遮挡了实孔径毫米波雷达与角反射体的通视条件。因此选择将角反布设在滑坡体的左侧区域。具体实孔径毫米波雷达和角反的布设平面见图15。

图14 K231周围环境概况Fig.14 K231 surrounding environment

图15 K231边坡实孔径毫米波雷达监测布设平面Fig.15 Layout plane of RAR monitoring at K231 slope
限于篇幅,本文仅分析角反1 的变形监测情况。径向变形监测见图16(a)。通过大量试验及数据观察表明实孔径毫米波雷达监测的径向变形和角反实际运行的空间变形的比值接近于cosθ(θ为角反空间变形方向与实孔径毫米波雷达和角反径向方向的夹角),即当角反发生一定空间变形时,实孔径毫米波雷达所监测的径向变形在数值大小会存在差异,但趋势基本一致(这一点通过试验模拟工况2也可印证),因此本规律也可用于判识实际边坡变形监测是否合理。从图16(a)中可以发现,3台实孔径毫米波雷达监测到的径向变形大小基本一致,这主要是由于3台雷达相对于角反1的方位角相差不大(可在后文中得到验证)。同时也注意到:在2022年11月27日前3台雷达监测到的径向变形基本平缓,在20 mm内,从12月后,呈现加速变形趋势,到2023年2月底变形达到近70 mm,3台雷达的基本趋势也是一致的,表明实孔径毫米波雷达监测结果合理。
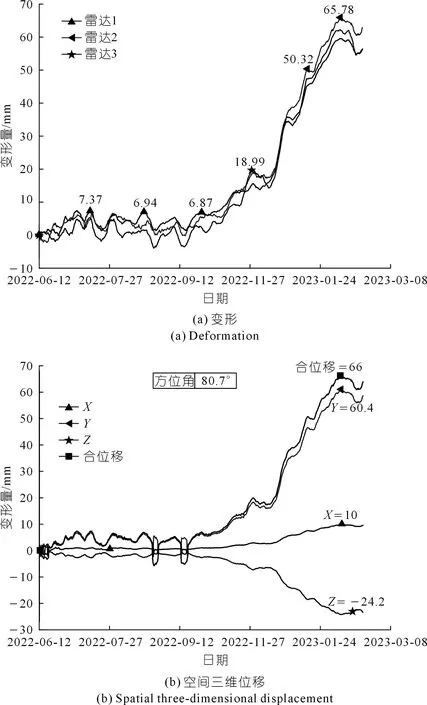
图16 K231边坡角反1的变形及空间三维位移信息Fig.16 Deformation and spatial three-dimensional displacement of Octahedral corner reflector 1 at K231 slope
图16(b)为基于1.3节三维坐标原理解译获取的空间变形信息。由于实际边坡体中无法判断准确的X、Y、Z信息,因此无法准确判断X、Y、Z的合理性。但可以从方位角的角度判识解译是否合理(实际边坡变形监测的意义更多也是获取合位移及方位角信息,为边坡的防治措施设计及预警服务),根据图16(b)可以看出,方位角约80.7°。从图14的边坡体地貌可初步判断边坡的角反1最有利滑动方向为60°~90°,解译的方位角信息较为合理,说明三维解译原理的合理性。
4.2 峨汉高速(路基边坡)
为加强对实孔径毫米波雷达应用效果的说明,增加峨汉高速一路基边坡作为工程案例分析,该点由于路基的不均匀沉降造成路面开裂。路基位于龙池镇桃源村与丁坪村交界附近,为构造剥蚀中低山堆积地貌,横向地形较为平坦,有一条小河沟从旁边经过,道路左侧(角反1)为人工护坡,右侧靠近(角反3)山体,且左侧有农田,整体地层较右侧松软(从上至下依次为人工填土、淤泥质黏土、砂岩)。由于该灾害点承灾环境相对简单,因此现场仅布设一台雷达(用于观察变形体的变形趋势),3个断面总计9个角反,整体地形环境及实孔径毫米波雷达与角反的布设关系见图17。

图17 实孔径毫米波雷达监测布设平面Fig.17 RAR monitoring layout plan
选取角反1、角反2和角反3作为案例分析,具体监测结果见图18,从图中可以看出,实孔径毫米波雷达监测的结果整体较为稳定,同时角反1的变形达到130 mm,角反2约为50 mm,角反3变形最小,在10 mm左右。从图18的地形环境可以看出,角反1所处左侧区域为农田(地层整体较为松软),且具有临空面,因此变形最大,角反3靠近山体,且埋设点位较为平缓,因此趋于稳定。监测结果结合地质条件分析,验证实孔径毫米波雷达的变形监测结果合理。
5 结 论
本文通过实孔径毫米波雷达监测摄影滑轨的变形过程,并结合峨汉高速的具体工程案例,论证了实孔径毫米波雷达的变形监测能力,整体可得出以下结论:
(1) 实孔径毫米波雷达具备变形监测的能力,当摄影滑轨返回至原点时,实孔径毫米波雷达的误差仅为-4.68 mm和6.39 mm,整体能准确反映出摄影滑轨的变形特征(包括变形量大小及变形速率等特点)。
(2) 数据整体分析及监测布设平面图表明:实孔径毫米波雷达能监测到水平覆盖范围在200 m以内角反射体,且能得到较好的变形信息,可满足中型滑坡体的监测需求。
(3) 整体验证了三维解译原理的可行性,其解译的空间位移误差在变形量达到970 mm时,误差为9 mm,误差比小于1%;方位角的解译与实际滑轨运动方向趋于一致。相关计算理论可为实孔径毫米波雷达应用于边坡监测提供技术支撑。
(4) 汶马高速及峨汉高速的工程应用表明:实孔径毫米波雷达具备地质灾害变形监测的能力,布设1台实孔径毫米波雷达可获取径向变形信息,布设3台实孔径毫米波雷达可获取X、Y、Z信息。案例可为实孔径毫米波雷达在后续高速公路、水利水电、矿山等领域边坡及工程结构变形监测中的应用提供经验。
猜你喜欢
金属加工(冷加工)(2023年10期)2023-10-23
中学生数理化·高一版(2021年3期)2021-06-09
数学物理学报(2021年1期)2021-03-29
重型机械(2020年3期)2020-08-24
数学年刊A辑(中文版)(2019年3期)2019-10-08
设备管理与维修(2019年10期)2019-02-16
电子测试(2018年13期)2018-09-26
西南石油大学学报(自然科学版)(2018年2期)2018-06-26
雷达学报(2017年1期)2017-05-17
光学精密工程(2016年1期)2016-11-07