
自动巡航草方格固沙机结构设计分析及试验
2024-01-09 09:46:22王红军张嘉谋林子钧尤德安彭志锋
农机化研究 2024年4期
王红军,廖 滔,张嘉谋,林子钧,尤德安,彭志锋
(华南农业大学 a.工程学院;b.电子工程学院(人工智能学院),广州 510642)
0 引言
我国是世界上荒漠化最严重的国家之一,全国沙化土地面积约占国土的27%,除上海、台湾及香港和澳门特别行政区没有荒漠化土地外,其余地区均有分布,且主要分布在青海、新疆、内蒙古、西藏、甘肃、陕西、宁夏、河北八省(自治区)。据统计数据显示,我国每年因荒漠化造成的经济损失高达640多亿元(截至2020年),而种植草方格是目前最有效的防风固沙方法之一。草方格种植即将废弃麦草呈方格状铺在沙上,再用铁锹轧进沙中,留麦草的1/3自然坚立在四边,再将方格中心的沙子拨向四周麦草根部,使麦草牢牢地坚立在沙地上。相比于人工种植草方格,研发一种草方格固沙机,采用机械化种植草方格的效率与经济性将大大提高。
近年来,防风固沙领域发展迅速,草方格固沙机作为防风固沙的主力之一,国内已进行众多研究与研发。在国内,由北京林业大学、东北林业大学承担的国家863计划“防风固沙草方格铺设机器人”项目开启了固沙造林机械研发的先河。李跃娟等人对草方格铺设机器人的横向插草机构进行了动力学仿真分析[1],杨博等人确定了草方格铺设机器人纵向铺设轮的最优设计方案[2],李玉印等人研究与设计了草方格铺设机构。上述研究虽然在理论上获得了大量成果,但因研发与实践脱节,草方格机器人并未在防沙治沙实践中得到有效的推广应用[3]。而国外所应用的草方格固沙机多为国内引进,中国的草方格固沙机也被国外称为“中国魔方”。目前,国外并未在草方格固沙机的研究方面有重大突破,也并未有能适应多种沙地类型与功能完备的草方格固沙机问世。
综合国内外对草方格固沙机的研究,笔者提出了一种集底盘、开沟机构、草箱机构、插草机构、覆压沙机构、播种及洒水机构及升降机构与一体的多功能自动巡航草方格固沙机。
1 整机结构设计与工作流程
目前,仍有不少地区的草方格铺设利用人工作业完成,作业时需两人共同工作,经过摆放、轧草、拨沙、压沙等步骤,先纵向后横向,形成1m×1m的沙障。现有的草方格固沙机将人工草方格铺设方式通过机械实现,相比于人工作业大大提升了作业效率与稳定性,降低了劳动力消耗;但铺设过程多采用已扎好的草皮进行铺设,且按照人工作业方式先进行完纵向铺设再进行横向铺设。横向铺设时对已铺设的麦草碾压率高,破坏性强,整体而言经济效益提升不大。人工铺设作业如图1所示。
1.1 “T+一”式草方格创新铺设方式
草方格铺设方式创新性设计为“T+一”式铺设,具体方法为:当固沙车走第1条直线时,纵横向同时进行种草工作;当固沙车转弯走第2条直线时,仅进行横向插草工作,持续“T”式与“一”式种草方式交替进行,完成草方格种植[4]。本铺设方式每次直线行走只会单侧轮子对横向草沙障造成碾压,而纵横向分开铺设的传统铺设方式会使两侧轮子都碾压到草沙障。“T+一”式铺设方式在铺设效率几乎相同的情况下,有效降低了对沙障的碾压率,大大提升了草方格铺设的经济效益。“T+一”式铺设方式如图2所示。

图1 人工铺设现场Fig.1 Manual laying site

图2 “T+一”式铺设方式Fig.2"T + 一" type laying method
1.2 整体方案设计
自动巡航草方格固沙机主要由7部分组成,分别为开沟机构、草箱机构、插草机构、覆压沙机构、播种及洒水机构、升降机构及底盘,如图3所示[5-14]。
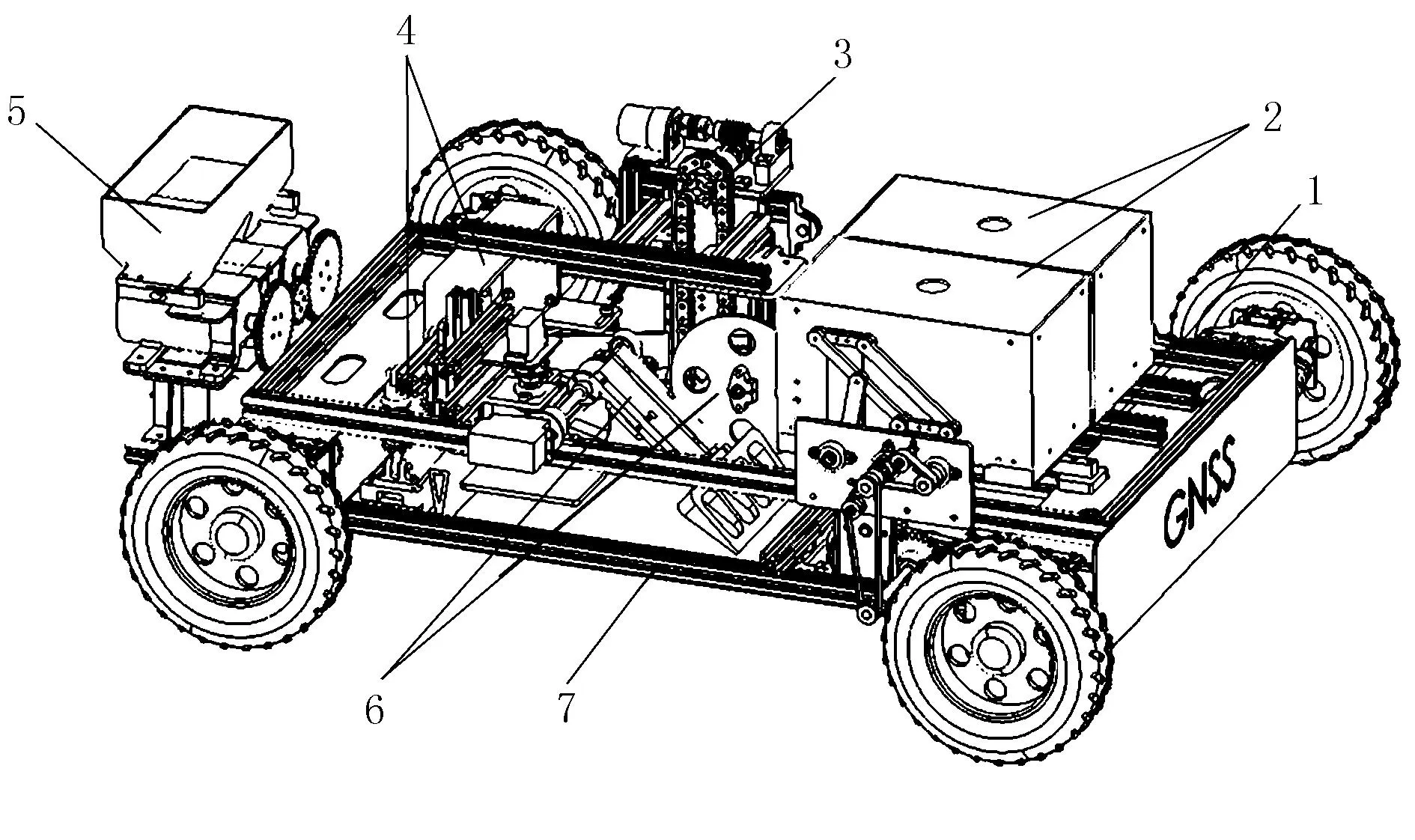
1.开沟机构 2.草箱机构 3.升降机构 4.覆压沙机构 5.播种及洒水机构 6.插草机构 7.底盘图3 自动巡航草方格固沙机整体方案设计Fig.3 Overall scheme design of automatic cruise grass square sand fixing machine
在这些机构的集成作用下,设备可以实现纵向铺草开沟、纵横向草料输送、纵横向扎草、纵横向覆土压沙、播种、洒水的动作,各个功能协调运作,自动巡航且全自动完成草方格铺设全工作过程。
1.3 工作流程
自动巡航草方格固沙机工作流程如图4所示。

图4 工作流程图Fig.4 Work flow chart
开始工作前,先在两草箱放入较整齐的散草,种子箱放种子,水箱中补水。启动机器后,升降机构平台下降,使纵向插草机构与纵向覆压沙机构下降,且带动绕线轮转动,通过滑轮组与钢绳使纵向开沟机构向下倾斜,插入沙面进行开槽,从而实现纵向开沟机构、纵向插草机构、纵向覆压沙机构联动。
当固沙机以“T”式铺草时,连接减速箱的电机正转,通过减速箱与同步带同时驱动两个草箱机构中的推草板、滚筒。此时,纵横向同时铺设沙障,即横向草箱通过连杆机构间歇式推草,横向插刀间歇式插草,横向覆压沙机构工作,使沙障更加牢固;纵向草箱通过滚筒持续送草,纵向铺设轮持续滚动进行插草,纵向覆压沙机构工作。
当固沙机以“一”式铺草时,电机反转,减速箱齿轮组与单向轴承的组合设计实现输入轴换向而一个输出轴转向恒定,另一个输出轴不转,从而实现以“一”式铺设草方格时横向继续插草,而纵向停止插草。
铺设草方格时同时,通过播种及洒水机构进行播种与洒水工作。
2 主要机构方案及工作原理分析
2.1 开沟机构设计
开沟器结构如图5所示。开沟机构设置于纵向草箱下方,通过绕线轮与钢丝绳和升降机构共用一个动力源。当升降机构下降时,钢丝绳拉紧,使开沟器向下倾斜插入沙面,为纵向沙障铺设刮开沟槽;当升降机构上升时,钢丝绳松开,开沟机构通过拉簧的作为归位。开沟机构整个工作过程无需额外动力源,通过设计联动机构实现共同运动。

8.连接型材 9.开沟器 10.法兰联轴器 11.轴承座 12.拉簧图5 开沟机构结构设计Fig.5 Structural design of the trench opening mechanism
2.2 草箱机构设计
草箱机构结构设计如图6所示。其功能是:当控制电机正转时,同时为纵向和横向沙障铺设提供草料,即为“T”式种草提供草料;当控制电机反转时,仅为横向沙障铺设提供草料,即为“一”式种草提供草料。

13.减速箱 14.横向推草板 15.连杆机构 16.横向草箱 17.纵向草箱 18.纵向滚草筒图6 草箱机构结构设计Fig.6 Design of trunk mechanism
该机构纵向草箱通过滚筒转动,使草箱内草料被连续送出;横向草箱通过具急回特性的推草板上的钉子,把草箱内的草料间歇性推出。
纵向推草的滚筒与横向具有急回特性的多连杆推草机构配合使用自主设计的减速箱,共用1个电机驱动,控制简单,节省动力源。减速箱中,将齿轮组与单向轴承组合设计,实现输入轴换向时一输出轴转向恒定、另一输出轴停止转动。当电机正转时,通过齿轮传动、同步带传动,同时驱动滚筒和推草板运动;当电机反转时,滚筒不转,推草板维持原来运动状态,符合“T+一”式草方格铺设工作模式。草箱机构结构简图如图7所示。
2.3 插草机构设计
插草机构结构设计如图8所示。其功能是:将草箱机构所提供的草料插进沙面,完成纵向与横向沙障的铺设。

图7 草箱机构结构简图Fig.7 Structural structure of trunk mechanism

19.超声波传感器 20.纵向插草刀 21.横向插草刀图8 草插草机构结构设计Fig.8 Structural design of the intubation mechanism
插草机构由纵向插草机构与横向插草机构组成。纵向插草机构采用铺设轮持续压入沙中进行插草,所设计铺设轮可绕轴做旋转运动(可在沙地滚动),便于铺设轮持续不断地进行插草。同时,安装超声波传感器,检测并反馈沙面到车底距离,通过升降平台实时调整纵向插草深度。其中,纵向插草刀下陷深度计算公式为
(1)
式中n—深陷指数;
k—沙地特性指数(N/cm3);
D—纵向插草刀直径(m);
b—纵向插草刀宽度(m);
G—纵向插草刀载荷(N);
Z0—下陷深度(m)。
由式(1)可知,纵向插草刀下陷深度Z0由纵向插草刀载荷G、纵向插草刀直径D、纵向插草刀宽度b决定,深陷指数n、沙地特性指数k、纵向插草刀直径D、纵向插草刀宽度b影响纵向插草刀所受的摩擦力。试验中,在满足结构强度的前提下,纵向插草刀设计为直径D=600mm、厚度b=4mm的金属圆盘。
横向插草机构将舵机与气缸结合,使插草刀走近似摆线路径,大大降低横向插草时的阻力问题。横向插草机构运动示意图如图9所示。

图9 横向插草机构运动示意图Fig.9 Schematic diagram of the lateral intubation mechanism movement
2.4 覆压沙机构设计
覆压沙机构结构设计如图10所示。其功能是:将已插入沙面的麦草两侧的沙子拨向麦草的根部,再将其压紧,使麦草牢牢地坚立在沙地上,使草方格沙障更牢固,不易被风吹散。
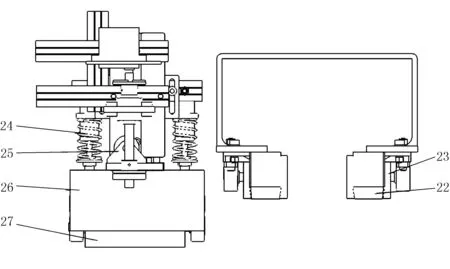
22.纵向覆沙手掌 23.纵向压沙滚轮 24.悬挂弹簧 25.机械限位装置 26.横向覆沙刀 27.横向压沙滚轮图10 覆压沙机构结构设计Fig.10 Structural design of the sand covering mechanism
覆压沙机构由覆沙与压沙种功能结构组成。其中,纵向采用仿生手掌覆沙及双侧压沙滚轮实现,并可以根据纵向草沙障的宽度调整覆沙仿生手掌的角度及两侧压沙轮的间距,以适应不同宽度的草沙障,在不破坏草沙障的前提下达较好的覆沙效果。横向覆压沙机构因需频繁进行往复的上下运动,且插覆沙刀插入沙面存在冲击力,故使用气缸驱动覆沙刀及悬挂式压沙滚轮上下运动,结合机械限位装置实现三位置运动,完成横向覆压沙。三位置运动示意图如图11所示。
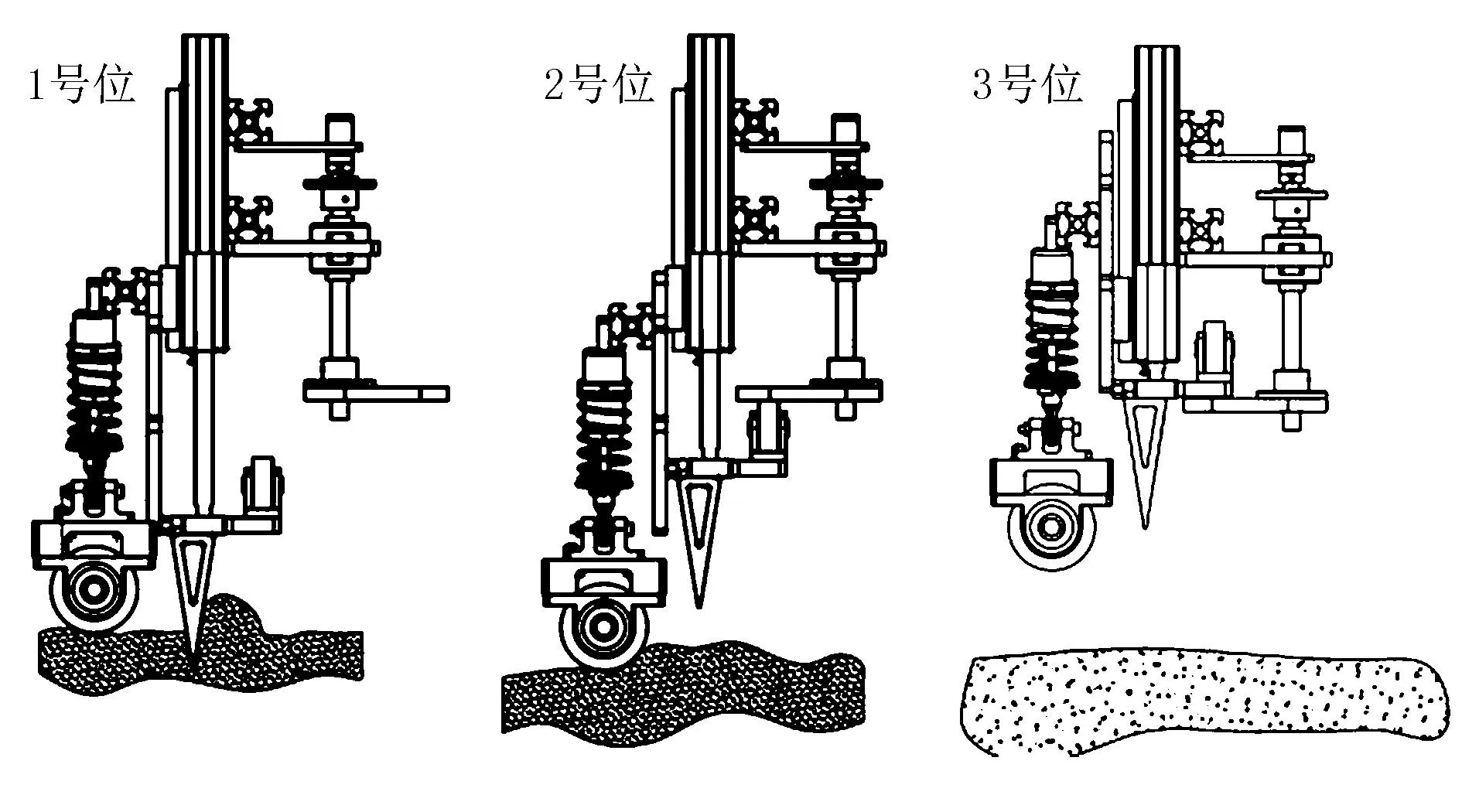
图11 横向覆压沙机构三位置运动示意图Fig.11 Schematic diagram of the three-position motion of the lateral sand covering mechanism
2.5 升降机构设计
升降机构结构设计如图12所示。其功能是:将纵向插草机构、纵向覆压沙机构压入沙面,并使开沟机构向下倾斜插入沙面,为纵向沙障铺设进行准备工作。

28.蜗轮蜗杆组合 29.绕线轮 30.链轮链条组合 31.升降平台 32.直线导轨图12 升降机构结构设计Fig.12 Structural design of the lifting mechanism
升降机构通过两个连接件将升降平台与直线导轨连接,再利用直板链条接头将其中一个连接件与链条连接。升降平台下安装有纵向插草机构、纵向覆压沙机构,当链轮转动时,链条其中一边上升(下降),升降平台也随之上升(下降),随之带动纵向插草机构与纵向覆压沙机构上升(下降);同时带动绕线轮转动,钢丝绳拉紧,使开沟器向下倾斜插入沙面,且通过超声波传感器测量固沙机底部相对沙面的距离,实时调整升降平台的高度,控制纵向插草机构与纵向覆压沙机构压入沙面的深度,保证纵向插草深度大致不变。升降机构机构简图如图13所示。

图13 升降机构结构设计Fig.13 General drawing of lifting mechanism(Including pulley group of opening mechanism)
2.6 播种及洒水机构
播种及洒水机构结构设计如图14所示。其功能是:在已铺设好的沙障上播下种子并洒水,以实现可持续发展。
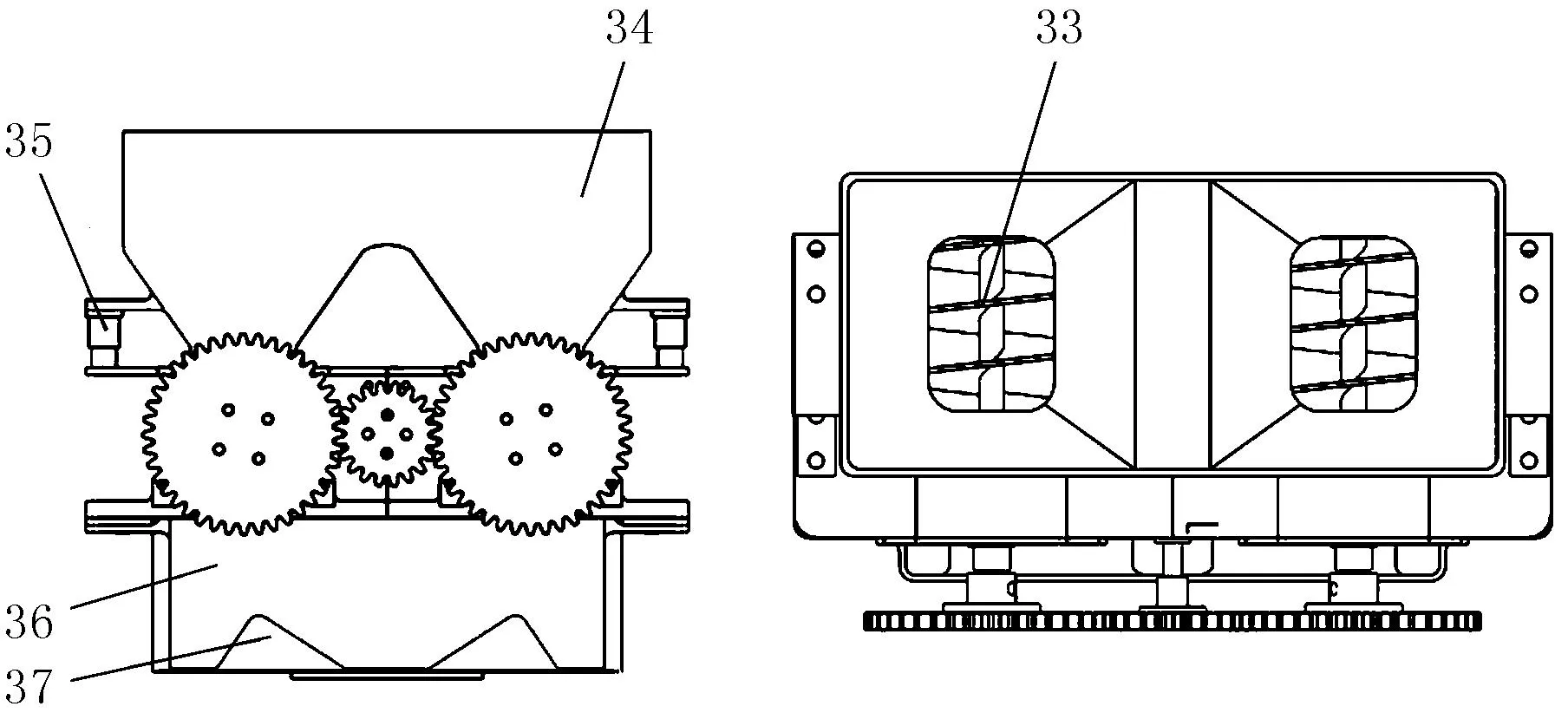
33.螺杆 34.种子箱 35.压力传感器 36.分播器 37.洒水箱图14 播种及洒水机构结构设计Fig.14 Structural design of sowing and sprinkling mechanism
播种及洒水机构通过设计螺杆把螺旋运动变换为种子的直线运动,种子由漏种孔落下,还可以通过控制螺杆转动的圈数来实现定量播种,并通过压力传感器实时反馈种子的剩余量。种子箱下方设计有变流器洒水箱,在完成播种作业后及时为种子洒水,保证种子的存活率。
3 主要机构运动仿真分析
3.1 多连杆横向推草机构运动仿真
为满足横向草箱间歇性高效送草的使用要求,在平面连杆机构的基础上设计多连杆横向推草机构,具备急回特性和间歇特性。通过Motion运动学仿真分析,得到其运动轨迹和速度等参数曲线,如图15、图16所示。其中,AB段为送草阶段,对应v-t图中峰值附近,速度较大,推草效率高;CD段为回程阶段,由运动轨迹可以看出推草L型板与散草脱离,不会将散草带回。设计采用两平行轴依靠同步带传动同时驱动的方式,从而帮助连杆机构中的平行双曲柄机构度过死点。
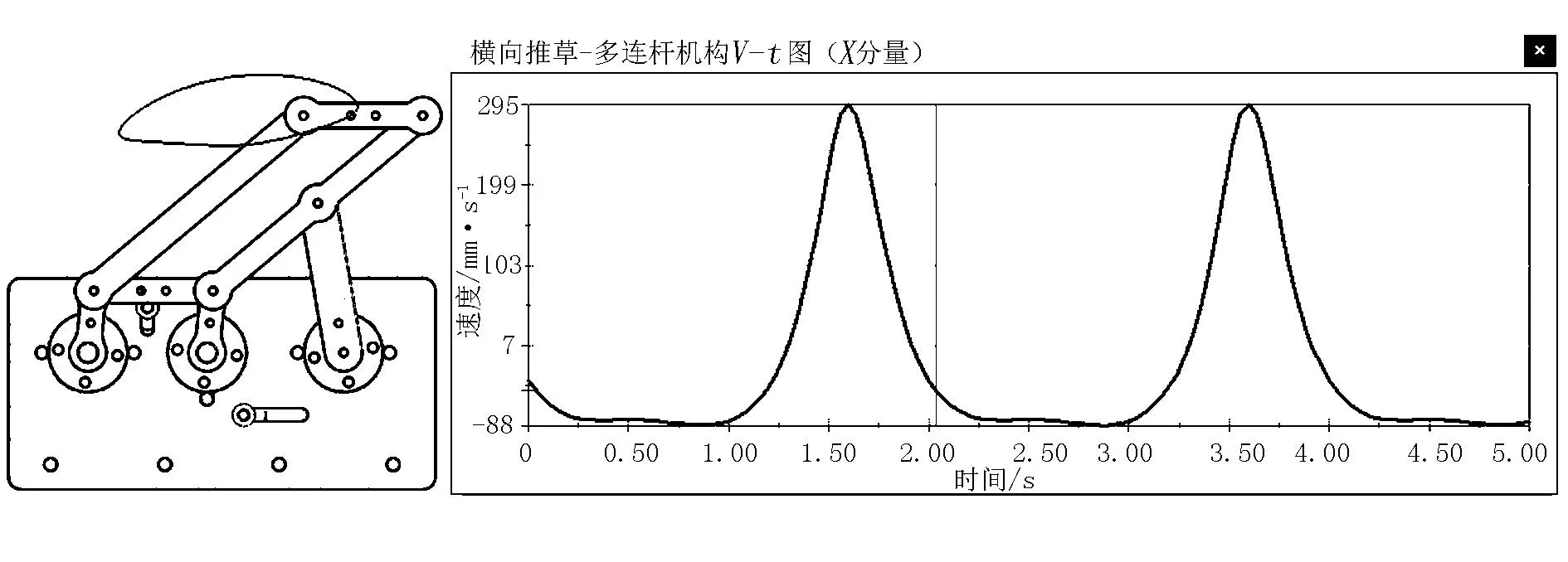
图15 横向推草机构速度(X分量)Fig.15 Horizontal grass pushing mechanism speed (Component X)
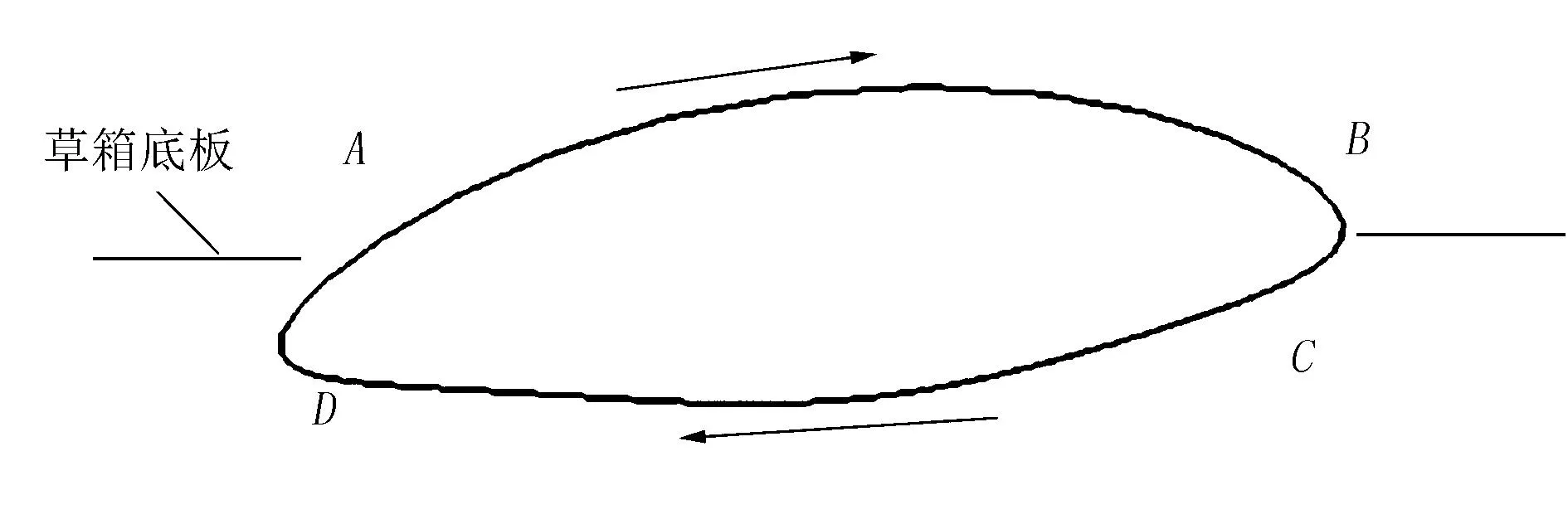
图16 推草机构运动轨迹图Fig.16 Movement trajectory diagram of thegrass-pushing mechanism
3.2 横向插草机构运动仿真
典型的直插式气动插草机构存在的问题是:插刀在机器行驶过程中插入沙地时,易使插刀受力过大弯曲、刚性冲击大,同时带来整机振动的问题,故结合摆线运动规律进行横向插草机构的设计。因横向插草机构固定在机座上,驱动轴旋转,同时随机器向前移动,插刀运动轨迹与摆线很相似,因此称为摆线式插草方式。设横向插草机构以旋转轴为中心旋转角速度为ω,固沙机前进速度为v,当v/ω等于旋转半径r时,插刀轨迹即为摆线。横向插草机构仿真运动曲线如图17所示。

图17 横向插草机构仿真运动曲线Fig.17 Simulation motion curve of lateral intubation mechanism
4 性能试验
4.1 试验条件
基于GNSS自动巡航,在华南农业大学进行了沙地试验,设定车速为0.72km/h,理论插草深度为100~150mm;设定“T式”插草为纵向持续不断,横向插幅为0.2m,“一式”插草仅进行横向,插幅为0.2m;播种速率为0.12r/s,主要测试性能为横向草箱推草数量、插草的准确性以及散草插入沙面的深度。
1)试验工具:试验样机(1台),散草,相机(1部),钢卷尺(1个),米尺(1个)。
2)试验方法:在试验样机纵向、横向草箱中放入充足的散草,在沙地上启动试验样机,要求样机以0.2m/s速度进行工作,直线行驶距离为10m,依次进行两次“T式”插草、两次“一式”插草;然后,用随机取样的方法数出每次横向插草所推出的散草数目、测量散草插入沙面的深度、散草露出沙面的高度和“T式”与“一式”对位的误差,取8组实验数据,与表1、表2和表3性能指标做对比,看是否符合要求。试验现场图如图18所示。

图18 试验现场图Fig.18 Test field diagram

表1 性能指标1Table 1 Performance indicator 1

表2 性能指标2

表3 性能指标3
4.2 试验结果与分析
当试验样机行驶速度为0.2m/s、直线行驶距离为10m时,“T式”插草共进行50次横向插草,“一式”插草共进行50次(即50次对位)。利用钢卷尺与米尺,测得所插沙障深度、高度数据如表4所示。

表4 试验测量数据(深度、高度)
通过试验测量数据,与表2性能指标对比,散草插入沙面的深度H1主要集中于110~140mm之内,达到了散草插入深度H1的性能指标(100~150mm)要求;沙障露出沙面的高度H2主要集中于130~170mm之内,达到了沙障露出沙面的高度H2的性能指标(110~180mm)要求。
利用钢卷尺与米尺,随即抽取8组“T式”与“一式”的对位组,测量其偏差值,结果如表5所示。

表5 试验测量数据(对位偏差)
通过试验测量数据,与表3性能指标对比,“T式”插草与“一式”插草对位的偏差L1主要集中于-30~30mm之间,达到了对位允许偏差L1的性能指标(-50~50mm)要求。
随机抽取8份横向沙障,将其从沙面中拔出,并记录其散草根数,所记录数据如表6所示。

表6 试验测量数据(推草根数)
通过试验测量数据,与表1性能指标对比,横向推草机构每次推出的散草数量主要集中于40~60根之间,达到了横向推草机构每次推草数量的性能指标(40~60根)要求。
5 结论
1)自动巡航草方格固沙机是集机械、电子和控制多学科领域知识融合的复杂机电系统,机构选型设计需要综合考虑沙漠固草的作业环境特点、种草方式、机构种草运动特性及播种洒水多功能特点。
2)自动巡航草方格固沙机集开沟机构、草箱机构、插草机构、覆压沙机构、升降机构、播种及洒水机构、底盘于一体,整体结构简单,能满足实际的作业需求,工作效率高,适应性强。
3)自动巡航草方格固沙机通过多种机构的协调作用,能良好地运用“T+一式”草方格铺设方式完成铺设工作,为小型化自动巡航种草固沙机的研制提供了理论依据。
猜你喜欢
小猕猴学习画刊(2022年3期)2022-03-28 16:33:01
现代盐化工(2021年4期)2021-09-19 08:11:22
西北林学院学报(2021年2期)2021-04-08 00:28:42
都市人(2020年8期)2020-10-15 01:46:40
应用化工(2020年4期)2020-06-04 03:11:42
农业工程学报(2019年16期)2019-10-10 02:23:08
铁道标准设计(2018年11期)2018-10-20 02:55:28
——以广州沙面西洋建筑景观为中心
南京艺术学院学报(美术与设计)(2018年1期)2018-04-20 07:10:00
辽宁林业科技(2017年4期)2017-06-22 10:23:36
现代园艺·综合版(2016年12期)2016-08-29 07:47:54
