CMA-BJ 2.0 版逐时快速更新追赶循环同化预报系统研发及应用Ⅰ:资料同化及系统构建*
2024-01-08 02:05仲跻芹童文雪张舒婷黄向宇范水勇
气象学报 2023年6期
陈 敏 仲跻芹 卢 冰 童文雪 冯 琎 张舒婷 黄向宇 范水勇
1.北京城市气象研究院,北京,100089
2.中国气象局城市气象重点开放实验室,北京,100089
1 引 言
短时临近预报(简称短临预报),即当前天气状况分析和未来短时间内(提前几分钟到6 h)的天气预报对于提前预测快速变化的天气情况、防灾减灾、保障社会各行各业正常运行极为关键。此外,对于突发性强、生命期短的强对流风暴、晴空湍流等危险天气事件的准确预测对保护生命财产安全极为重要,也具有重大经济价值。由于准确的初始场有助于提高预报准确度,预报实践上一般通过频繁的资料同化将大量的高时、空分辨率的多源观测资料融入模式初始场来实现短期数值预报的快速更新。
随着气象观测体系的不断完善,各类地基、天基和空基观测资料的实时接收、处理和同化技术取得长足进步。基于这些观测基础,快速更新循环同化预报已经成为世界上先进业务中心开展区域数值预报的主流策略。法国气象局的对流尺度数值预报系统AROME-France(Application of Research to Operations at Mesoscale-France)自2008 年底开始运行(Seity,et al,2011),该系统水平分辨率1.3 km、90个垂直层,开展逐时更新的三维变分同化(3DVar)。英国气象局设计了可以在全局和有限区域模式中均可开展的三维和四维变分同化(4DVar)方案,建立了每小时更新循环的对流尺度区域4DVar 系统并从2016 年7 月开始业务运行(Ballard,et al,2016)。德国气象局为其非流体静力对流可分辨模式COSMO(Consortium for Small Scale Modelling)(Baldauf,et al,2011)基于LETKF(Local Ensemble Transform Kalman Filter)开发了KENDA(Kilometre-scale ENsemble DA)资料同化系统(Schraff,et al,2016),在逐时循环分析时刻同化前一小时时间窗内的所有常规观测资料,而且LETKF 与每个集合成员的LHN(Latent Heat Nudging)(Benjamin,et al,2004;Stephan,et al,2008)相结合,用于实现雷达地面估测降水的间接应用。早在1994 年美国NCEP 即已开展了区域快速更新循环系统(RUC,Rapid Update Cycle)的首次业务应用,当时系统水平分辨率为60 km、更新频次为3 h; 2002 年RUC系统升级为20 km 分辨率、更新频次为1 h 的RUC 20 版(Benjamin,et al,2004);2014 年9 月起,发展了北美地区3 km 水平分辨率、逐时更新循环的对流尺度模式系统HRRR(Benjamin,et al,2016)。近年来HRRR 系统采用混合三维集合变分(3DEnVar)技术同化多种常规观测资料和卫星辐射率观测,并在资料同化和物理方案方面采用了一系列更新,快速更新循环同化预报性能得到了显著提升(Dowell,et al,2022;James,et al,2022)。
近年来中国区域数值预报业务也逐渐开始采用快速更新循环的同化方式来开展。中国气象局北京城市气象研究所基于WRF 模式及其三维变分模块发展了针对北京地区的三重嵌套网格(27 km×9 km×3 km)、逐3 h 快速更新循环同化预报系统(BJ-RUC,Beijing-Rapid Update Cycle System),该系统于2007 年开始业务运行(范水勇等,2009),并在2008 年北京夏季奥运会气象服务保障中发挥了重要作用(Chen,et al,2009;Wilson,et al,2010)。上海区域气象中心基于ADAS(ARPS Data Assimilation System)资料同化系统和WRF 模式发展了快速更新同化预报系统(SMB-WARR),并于2009 年实现业务运行,该系统水平分辨率为3 km,采用逐时更新循环同化的方式通过ADAS 的逐步订正方法同化常规观测资料,而雷达反射率和FY-2E 辐射率资料则采用云分析的技术实现同化应用(陈葆德等,2013)。中国气象局广州热带气象研究所基于中国新一代数值预报模式GRAPES-MESO 发展了华南地区逐时循环同化预报系统(GRAPES_CHAF)(陈子通等,2010),该系统采用三维变分方法同化了包括卫星云导风、雷达径向风、VAD、飞机报以及地面、船舶和探空等常规及遥感观测资料,并采用云分析和张弛逼近方法实现雷达反射率因子的同化。2008 年国家气象中心在GRAPES_CHAF 系统流程基础上开展一系列集成研发,建立了中国全国/区域两级使用的GRAPES_RAFS(GRAPES Rapid Analysis and Forecast System)系统并逐渐发展为中国气象局中尺度天气数值预报系统(CMA-MESO),该系统在业务应用中不断升级改进,为中国短时临近预报业务发挥了重要的支撑作用(郝民等,2011;徐枝芳等,2013,2021;许晨璐等,2017;黄丽萍等,2017)。
BJ-RUC 快速更新循环同化和预报系统历经多年发展,2017 年6 月更名为睿图-短期(RMAPSST,Rapid Refresh Multiscale Analysis and Prediction System-Short Term)1.0 版系统并正式业务运行。基于该系统先后开展了针对大量稠密、多源常规及遥感观测资料的同化方法研发,包括多普勒天气雷达径向风和反射率(范水勇等,2013;陈敏等,2014;何静等,2019)、风廓线雷达(Zhang,et al,2017;Wang,et al,2020,2022)、GNSS/ZTD(Global Navigation Satellite System/Zenith Total Delay)(仲跻芹等,2017)、风云四号(FY-4)静止卫星辐射率和云导风(Chen,et al,2020)、多源极轨卫星辐射率(Xie,et al,2018,2019,2020)、地面自动站观测(张鑫宇等,2021)等。此外,基于睿图-短期1.0 版系统业务预报展现出的地面要素偏暖、偏干,中国9 km 分辨率范围内降水预报过强等系统性预报偏差开展了一系列系统误差物理成因分析(卢冰等,2017)集中研发,在与地面要素和降水预报相关关键物理过程优化(杨扬等,2021)、模式系统基础静态数据更新(卢冰等,2019)等多方面形成综合性优化解决方案和核心技术,并逐渐纳入模式系统更新。
近年来短临预报、预警服务越来越高的实际需求促使开展更高频次的循环同化和预报。但是更新频次从逐3 h 到逐时的提升,首先需要解决高频噪声初始化、模式预报误差的快速增长等一系列关键科学问题。其中发展适合的初始化方案、处理好快速循环同化中起转问题对整个系统的稳定性和资料应用方面都起到重要作用。NOAA 发展的NAM 逐时更新循环系统采用了数字滤波初始化方案(Hu,et al,2006;Wu,et al,2017),英国气象局在其发展的逐3 h 更新循环系统中采用了分析增量更新初始化方案 (Ingleby,et al,2013);日本气象厅和英国气象局在其各自的4DVar 逐时更新循环同化预报系统中均采用了数字滤波弱约束技术(Honda,et al,2005;Ingleby,et al,2013);上述初始化方案的引入目的均为在极短的积分时间内使模式快速达到平衡状态,以避免噪声累积导致不合理的资料剔除以及对预报性能的损害。此外,如何有效保证始终在全球预报的大尺度约束条件下开展区域资料同化、抑制模式大尺度预报误差的增长也是快速更新循环需要解决的重要问题。通常采用的办法包括实现大尺度全球预报和区域模式中小尺度预报的谱混合,如HARMONIE-AROME 系统(Müller,et al,2017),也包括在代价函数中通过采用大尺度误差约束来实现全球模式信息的引入(Guidard,et al,2008;Dahlgren,et al,2012)。
本研究针对上述问题开展了以发展逐时快速更新循环为目标的一系列相关技术研发,最终实现整体技术方案的综合集成,并对睿图-短期预报业务系统进行全面迭代更新,在原来的1.0 版基础上拓展研发建立了睿图-短期(现已更名为CMA-BJ,下文同)2.0 版预报系统。文中对CMA-BJ 2.0 版逐时快速更新循环预报系统包括分析增量更新初始化方案和快速追赶循环策略在内的运行框架、以及大尺度预报场动态混合方案、全国雷达反射率因子同化和全国风廓线雷达同化应用资料同化等技术更新进行介绍。因篇幅所限,CMA-BJ 2.0 版系统在关键物理方案的主要技术更新、综合预报性能评价及典型个例评估将另撰文介绍。
2 逐时快速更新循环预报系统(CMA-BJ 2.0 版)概述
CMA-BJ 2.0 版是一套基于WRF 4.1.2 版和WRFDA 4.1.2 版建立的区域逐时快速更新循环同化及短时预报系统,预报区域见图1。系统的主要设置参数如表1 所示。
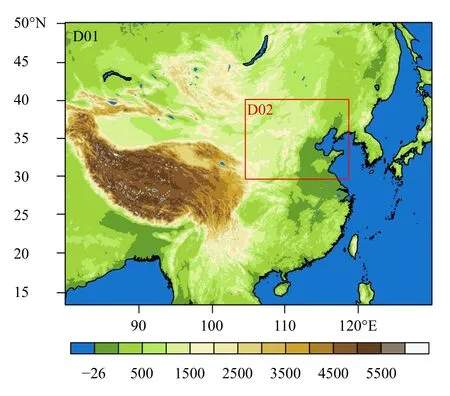
图1 CMA-BJ 2.0 版系统预报区域 (D01 为9 km 分辨率,D02 为3 km 分辨率;色阶为地形高度,单位:m)Fig.1 Forecast domains of the CMA-BJ v2.0 system(D01:9 km,D02:3 km;the shadow is the altitude,unit:m )
3 逐时快速更新循环系统构建
逐时频次的快速更新循环和预报系统在实际业务运行中往往存在如下问题:第一,快速更新循环的同化背景场来自前次循环的1 h 预报,通常模式在积分1 h 后无法达到理想的平衡状态,导致更多高频噪声出现以及预报误差在多次循环后快速积累,对当次及后续循环的同化及预报造成不利影响;第二,为满足短临预报需求,一方面要求在模式中充分吸收尽可能多的临近观测资料,在初值中有效反映临近时次的大气特征;另一方面要求尽可能缩短预报员获得预报产品送达的滞后时间,因此需要逐时更新循环预报的启动时间尽可能提前以快速完成模式预报和产品分发。但是各类高频观测资料往往具有不同的截断时间,更新循环的快速启动导致此时获得的观测资料截断时间过短,能够进入同化使用的资料量极为有限,不能保证同化后的分析场质量。因此,发展了增量分析更新初始化方案以及资料同化的快速追赶循环策略以应对上述更新循环预报所面临的实际困难。
3.1 增量分析更新初始化方案
增量分析更新(IAU,Incremental Analysis Updates)初始化方案由Bloom 等(1996)提出,目前已经被广泛应用于大气和海洋科学研究中。IAU方法原理是在以同化时次为中心的同化时间窗内,将资料同化形成的分析增量作为强迫项逐步加入模式积分过程,而不是在分析时刻一次加入,从而有效控制资料同化带来的虚假高频噪声,有效控制风场、气压场、水物质和动力场之间的初值不平衡,缩短模式的起转/消转时间。
对于任意一个预报变量 ϕ,在初始化时间窗(Δtc)中的倾向方程可以写成以下形式
Chen 等(2023)发展了基于WRF 模式的增量分析更新初始化方法。WRF 模式中预报方程采用时间分裂方案,即对具有气象意义的低频波采用三阶Runge-Kutta(RK3)时间差分方案开展积分,而高频声波则采用更短的时间步长积分以保证其数值稳定性(Skamarock,et al,2008)。换言之,RK3时间差分方案采用3 步格式来得到预报量从ϕ(t)到ϕ(t+∆t)的变化值。为避免将IAU 倾向项添加到RK3 不同时间步长中的困难, ϕ(t+∆t)可写作如下形式
式中, ϕ代表了WRF 模式中水平风分量、位温、干空气扰动气压、水汽混合比以及各类水凝物混合比等可以通过资料同化产生分析增量的预报物理量。很多IAU 应用主要采用时间窗内积分时间步数的倒数作为时间权重系数 λ(t)的取值,以实现分析增量在时间窗内的均匀分配。Chen 等(2023)发展了采用Dolph-Window 滤波器来产生时间权重系数的方案并且产生了较好的效果。基于CMA-BJ 2.0 版开展的一系列批量试验表明,IAU 作为一种初始化方法,与无IAU 试验相比,模式积分过程中形成的降水率更为稳定,在初始噪声和水凝物初值的起转/消转控制方面产生了合理和理想的结果。此外,详细的小时降水量和雷达反射率预报的比较也表明,IAU 有效地纠正了逐时更新循环预报中通常由于起转问题造成的过量降水预报,该初始化方案的应用对于各种阈值和预测长度的预报性能均产生了积极正面的影响。
因此,在CMA-BJ 2.0 版模式系统中采用IAU作为初始化方案,设定分析增量更新的时间窗为2 h,即每次小时更新循环资料同化后形成分析增量按Dolph-Window 滤波器产生的时间权重配比在从t=-1 h 开始积分至t=1 h 的时间段内逐步加入模式,并在t=1 h 后正常预报。
3.2 快速追赶循环策略
考虑到各类观测资料实际到报截断时长的差异,实现对各类观测资料充分高效的利用,在CMABJ 2.0 版系统中发展了逐时快速更新追赶循环的运行策略。
分析观测资料到报情况可知,目前在北京市气象局天擎业务环境下观测资料实时接收服务器上每个时次的全球电信系统(GTS)资料共有4 个截断时间,分别为整点时次后的13、37、66 和92 min。设整点时间T在滞后时间为(T+92) min 资料到报量为100%,则(T+66) min 的到报量最低为探空观测,达到86.34%,其他例如飞机、船舶、国家及区域自动气象站、地面观测等资料的到报率均超过90%(图2),因此考虑将同化GTS 资料的逐小时循环启动时间设定为整点后的66 min,以保证同化过程能够使用更为完整的GTS 观测资料。

图2 各类GTS 观测资料不同截断时间到报情况Fig.2 Data arrival reporting of various GTS observations at different cut-off times
雷达、地面自动气象站观测是逐时更新循环系统的另一类重要资料来源,这些快速到达的实时观测资料的同化应用对于快速更新循环预报系统产品发挥短临预报服务应用价值起到极为关键的作用。因此,在CMA-BJ 2.0 版预报系统中设计了逐时追赶循环的运行框架,主要分为2 部分:(1)追赶循环,于t时整点后(t+70) min 启动,同化t时刻截断时间为66 min 的观测资料,使得每次循环能够用到足够数量的探空等重要观测,保证逐时更新循环同化背景场的基本性能不会因为观测资料量不足而明显下降。然后开展1 h 预报,以形成当次循环和下次追赶循环的同化背景场。(2)更新预报,所用的观测截断时间为15 min,重点考虑雷达等资料的快速应用以及短临预报服务的时效性,在此基础上进行24 h 的预报及后处理产品分发等一系列流程。追赶循环的时间线如图3 所示。
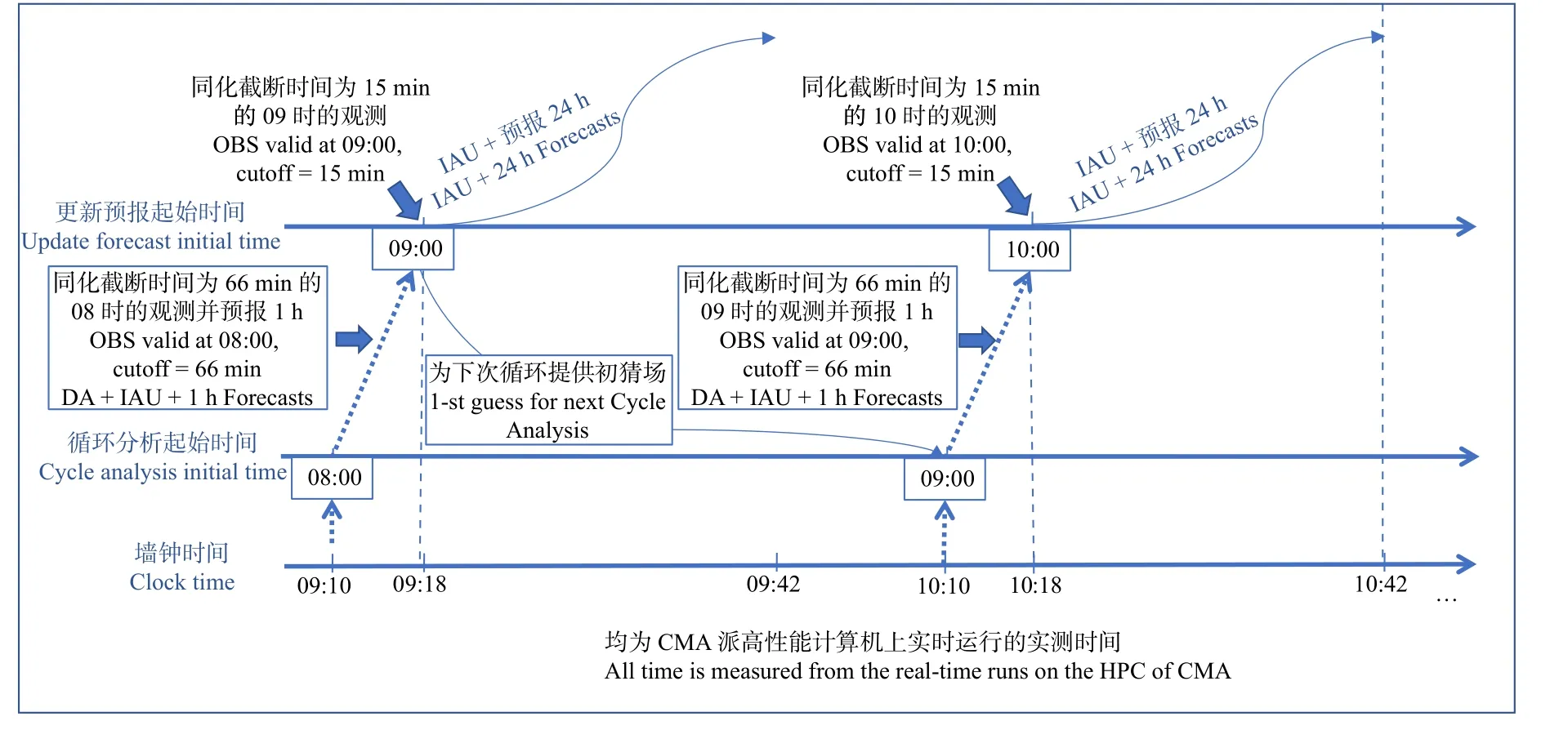
图3 逐时快速更新追赶循环运行时间线 (北京时)Fig.3 The running timeline of the hourly catch-up cycle (BT)
追赶循环阶段需要的墙钟时间为8 min,即到(t+78) min 可获得(t+1) h 时次的预报,并以之为背景场在(t+78) min 时刻开始第二个部分即(t+1) h时次的同化及未来24 h 预报,此过程所需的墙钟时间约为24 min,预报员将于(t+1) h+42 min 时刻收到(t+1) h 起始的24 h 预报产品,即实际预报产品的滞后时间约为42 min。
整体来看,该流程兼顾了短临预报要求的时效性以及观测资料数量,而且规避了逐时循环雷达资料累积同化带来的预报误差快速增长的问题,较好地满足逐时快速更新循环的业务需求,并且有望与逐3 h 快速更新循环达到相当的预报性能。但对业务流程建设有一定的要求:GTS 资料中转服务器与高性能计算机必须实现时钟同步;业务流程规范高效;具备完整的纠错机制。现已在中国气象局派高性能计算机和北京市气象局睿高性能计算机上完成了上述逐时快速更新追赶循环流程的搭建,并于2020 年6 月17 日起开始实时运行。基于此形成了CMA-BJ 2.0 版系统的业务运行基础框架。
3.3 逐时快速更新循环系统运行流程
CMA-BJ 2.0 版逐时快速更新追赶循环业务每天包含1 次冷启动、24 次循环分析和24 次更新预报运行,即在02 时(北京时,下同)由前一天20 时起始的ECMWF 全球6 h 预报驱动模式开始冷启动并预报6 h,然后基于其在08 时的预报场开展当日的第一次循环分析部分的同化,并由此开始一天24 次快速更新追赶循环的分析和预报。循环分析逐时同化GTS 等观测资料并预报1 h,为当前时次的更新预报运行提供背景场;更新预报同化雷达和自动气象站等快速到达的最新观测资料并预报24 h。CMA-BJ 2.0 版系统循环运行流程如图4 所示。
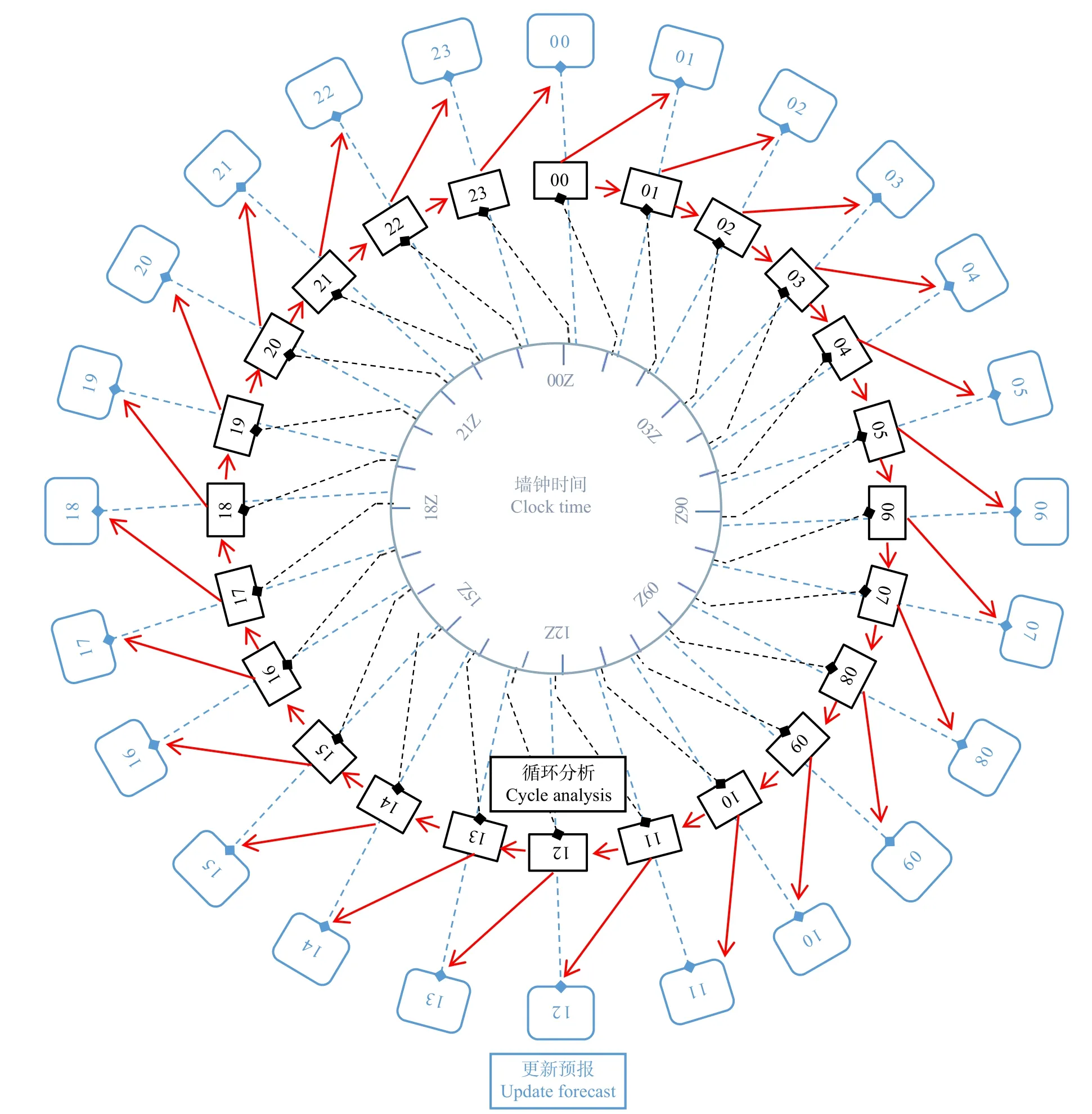
图4 CMA-BJ 2.0 版系统的循环分析和更新预报流程 (内圈黑色框内数字为循环分析起报时间,“Z”为世界时,黑色虚线指示该次循环分析的启动时间;外圈蓝色框内为更新预报起报时间,蓝色虚线指示该次更新预报的启动时间;红色实线表示箭头所指的运行时次以箭尾所指的运行时次的1 h 预报为背景场)Fig.4 Flowchart of cycle analysis and forecast update of the CMA-BJ v2.0 system (the number in the black box in the inner circle is the start time of the cycle analysis,"Z" is UTC,and the black dotted line indicates the start time of cycle analysis;the blue box indicates the start time of forecast update and the blue dashed line indicates the start time of forecast update;the solid red line indicates the running time denoted by the arrow,and the 1-hour forecast of the running time used as the background field is denoted by the arrow tail)
4 逐时更新循环资料同化
CMA-BJ 2.0 版系统基于三维变分同化技术,采用u、v而非流函数、势函数作为风场的控制变量,实现常规地面、探空、自动站、小球测风、飞机报、风廓线雷达、GNSS/ZTD 水汽、天气雷达反射率拼图和径向风等观测资料的逐时更新循环同化应用(图5)。与CAM-BJ 1.0 版系统相比,资料同化方面的主要更新包括实现了中国全国雷达反射率拼图资料和风廓线雷达观测资料的同化应用,还发展了同化背景场的大尺度预报动态混合方案,以有效抑制连续循环过程中预报误差累积导致的大尺度场变形问题。
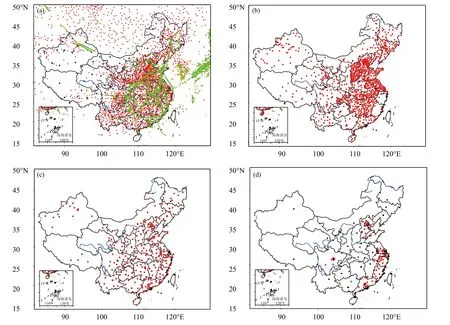
图5 CMA-BJ 2.0 版同化应用的观测及其分布 (a.常规地面 (红点)、高空 (蓝点)、飞机报 (绿点)、浮标 (橙点)和船舶 (粉点),b.地基GNSS/ZTD,c.天气雷达,d.风廓线雷达)Fig.5 Observations assimilated by the CMA-BJ v2.0 system (a.SYNOP (red),TEMP (blue),AMDAR (green),BUOY (orange),and SHIP (pink),b.ground-based GNSS/ZTD,c.weather radar,d.wind profiler radar)
4.1 大尺度预报场动态混合方案
在连续循环开展资料同化一段时间后,由于模式预报误差不断积累,以及在资料稀疏地区缺少观测对预报的有效修正,往往导致循环中初始条件积累相当大的系统性误差。为解决上述问题,一般的方法是基于全球模式预报定时重启循环同化预报系统,但这种策略可能会带来预报的不连续。另一些预报系统中,全球预报与区域模式预报尺度混合的方法被用来改进初始条件的大尺度系统性误差(Wang,et al,2014;Hsiao,et al,2015)。这些方案将给定波长以上同化背景场的长波部分逐渐逼近或全部更换为全球模式对应尺度的预报,从而保证了模式初始场的大尺度特征始终与全球预报一致,但仍保留区域模式预报更为准确的中小尺度特征。
区别于尺度混合方案中通常采用的固定截断波长,Feng 等(2020,2021) 发展了一种动态预报混合方案(DFB,Dynamic Forecasts Blending),可以根据全球模式预报质量的动能谱和区域模式预报误差的动能谱分布计算随时间变化的截断波长,之后将大尺度全球预报与区域模式中、小尺度预报场按该动态计算波长进行切割并混合,使得混合波数具有了波数域上的时、空变化流依赖特征。该方案在RMAPS-ST 1.0 版的逐3 h 快速更新循环预报系统中的应用结果表明有效提升了模式降水预报性能并减小预报的系统性误差(Feng,et al,2021)。因此,在CMA-BJ 2.0 版模式系统中,使用该方案将前次循环的小尺度场和全球模式的大尺度场实时混合,使用全球模式大尺度场约束区域模式中热、动力场的发展。
DFB 方案选择6 阶正切低通滤波器为算法基础,给定一个分割尺度,该滤波器可以提取物理量场的大尺度和小尺度部分。利用滤波器提取的全球模式的大尺度部分和区域模式的小尺度部分相加,就得到该物理量的混合场。全球模式输出变量(Xg) 、 区域模式输出变量(Xr)和变量的混合场(Xb)可以分别表示为
式中,k是模拟区域范围的波数,取值范围是0 到模拟分辨率所能计算的最大波数N; π 是圆周率;kc表示分割尺度;f代表滤波器,定义为
动态混合算法基于两个步骤实时计算截断波数kc:(1)通过计算全球模式相对于再分析资料的动能预报偏差小于指定百分比阈值(CMA-BJ 2.0 版使用5%)的波数为待保留的大尺度截断波数kg;(2)旨在保持小尺度系统的增长,即使用全球预报和区域模式预报之间的残余小尺度波段动能差异百分比阈值(CMA-BJ 2.0 版使用7%)为指标来确定待保留的区域模式小尺度截断波数kr。从两个截断波数中选择较小者确定最终的动态截断波数,即kc=min(kr,kg)。该波数随模式的运行和系统的发展自行动态调整。该算法的更多详细信息参见Feng 等(2020,2021)。
在CMA-BJ 2.0 版系统中,DFB 方案应用于逐时分析循环的同化背景场,即在每次同化开始前,先实施背景场的DFB 动态混合修正,然后以其修正后的结果为背景场开展资料同化。2019 年1 月和7 月的逐时更新循环同化及预报试验结果表明,DFB 方案的应用对地面要素预报性能总体呈正影响,对降水预报而言,各阈值的TS 评分有明显提升且伴随更接近1 的平均偏差(BIAS)评分(图略);对高空要素尤其是风速的预报性能总体也呈正影响(图6),且在12 时起报预报中表现的更为显著。说明 DFB 方案在保持了区域数值预报模式预报系统稳定性的同时,能够有效控制和修正不断更新循环带来的累积误差。
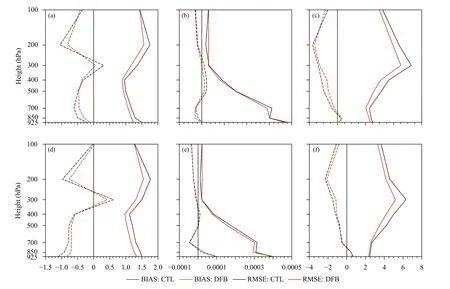
图6 2019 年1 月1—31 日12 时 (世界时) 起报预报的不同高度温度 (a、d, 单位:K)、比湿 (b、e,单位:kg/kg) 和风速 (c、f,单位:m/s)平均偏差 (BIAS) 和均方根误差 (RMSE) 评分对比 (黑线:对照,红线:DFB) (a—c.12 h 预报,d—f.24 h 预报)Fig.6 Upper air temperature (a,d,unit:K),specific humidity (b,e,unit:kg/kg) and wind speed (c,f,unit: m/s) scores of forecasts initialized at 12:00 UTC in January 2019 (black line:CTL,red line:DFB) (a—c.12 h forecasts,d—f.24 h forecasts)
4.2 中国全国雷达反射率拼图资料的同化应用
CMA-BJ 2.0 版系统的一项重要更新内容即是实现了中国全国范围224 部多普勒天气雷达反射率拼图资料的实时同化应用。站点分布如图5c 所示,雷达型号包括SA、SB、SC、CB、CC 和CD。在获取雷达基数据后,开展了一系列的质量控制,包括:异常数据标识、杂波移除、孤立点移除、间隙填充、干扰回波移除、地物杂波剔除、超折射AP 地物杂波移除、海浪回波识别剔除、阻挡波束补偿、晴空杂波移除以及距离去折叠等。质量控制后的单雷达基数据被处理成三维等高面产品CAPPI 以及单站雷达CAPPI 产品后生成全国雷达回波拼图产品。雷达基数据质量控制由中国气象局大气探测中心负责完成,实时生成逐10 min 更新的垂直0—12 km、分辨率500 m 共计24 层的三维等高面CAPPI 产品和单站雷达CAPPI 产品,雷达数据滞后时间约13 min。
CMA-BJ 2.0 版系统采用雷达反射率资料间接同化方案(范水勇等,2013;Wang,et al,2013)来实现全国雷达反射率拼图资料的同化,该方案先将反射率因子Ze根据同化背景场温度Tb分类后按如下关系反演形成各类水凝物含量(雨qr、雪qs、霰qh)的代理观测(Gao,et al,2012)
式中,Z(qr)=3.63×109(ρqr)1.75,Z(qs)=9.80×108(ρqs)1.75,Z(qh)=4.33×1010(ρqh)1.75, ρ是 空 气 密度, α 在0(Tb=-5℃ )和1(Tb=5℃)之 间 线 性 变化。此外,对于观测高度大于凝结抬升高度且观测值大于某一阈值(设为30 dBz)的雷达反射率因子,即认为云中达到饱和,即相对湿度为100%,此时将雷达观测点的饱和水汽值作为代理观测进行同化。采用如下线性观测算子同化估计水汽qv
式 中,p为 气 压,T为 温 度,ε=0.622,c1=6.112,水汽的增量dqv由相对湿度RH的增量dRH和温度增量dT计算得出。在CMA-BJ 2.0 版系统中水汽的观测误差指定为饱和水汽值的20%。
睿图-短期1.0 版的业务预报性能结果表明,雷达反射率拼图资料的连续循环同化往往易造成水汽的循环累积而导致降水空报,因此从两方面调整雷达观测资料的同化策略。如表2 所示,一方面雷达反射率资料仅在更新预报步骤开展同化,以规避连续循环同化造成的水汽正向过量累积;一方面对雷达同化采用调整后的背景场方差尺度和长度尺度,根据一系列单点试验和批量同化试验结果,将同化雷达观测时的背景场误差方差尺度(Var_scaling)从原来设置的0.5 调整为1,特征长度尺度(Len_scaling)从0.5 调整为0.25,以加大雷达观测资料的权重并进一步强化雷达观测的局地化特征。
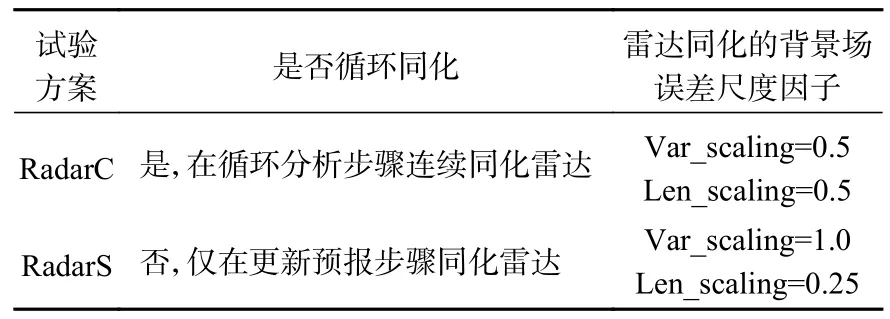
表2 雷达资料同化策略Table 2 The radar data assimilation strategy
图7 为2019 年 6 月 4 日 09 时雷达资料同化后起报的0—3 h 和3—6 h 的逐3 h 累计降水预报分布,在广东、广西、云南等地区RadarS 相比RadarC降水空报的强度和范围均明显减小,整体上试验RadarS 的预报与观测更接近。
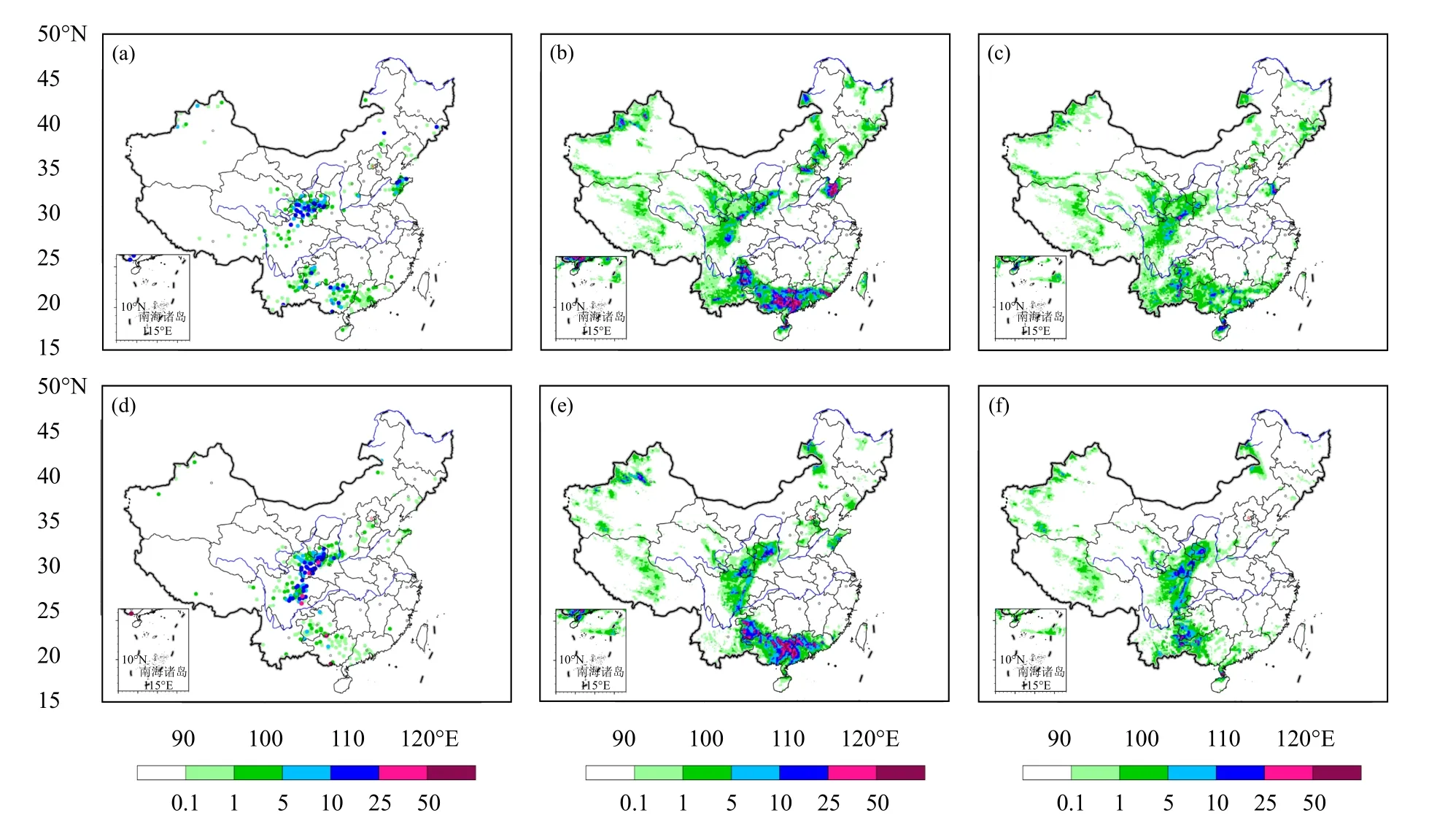
图7 2019 年6 月4 日09—12 时、12—15 时 (世界时) 3 h 累计降水观测 (a、d) 和试验RadarC (b、e)、RadarS (c、f) 于4 日09 时开始0—3 h (b、c) 和3—6 h (e、f) 的3 h 累计降水预报Fig.7 3 h accumulated precipitation valid during 09:00—12:00 UTC 4 June 2019 (a,d.observations,b,e.RadarC,c,f.RadarS;b,c are the 0—3 h forecasts,e,f are the 3—6 h forecasts)
在CMA-BJ 2.0 版系统中采用上述2 种雷达同化方案开展了2019 年6—8 月的逐时更新循环批量试验。9 km 分辨率逐3 h 累计降水预报的客观检验评分结果(图8)显示,应用改进方案后0—24 h 预报时效降水预报TS 评分在各降水量级都有显著提高(图8a),0—12 h 预报时效内各降水量级的BIAS评分显著减小,更接近1(图8b),表明RadarS 方案的应用有效抑制了原方案导致的降水空报。
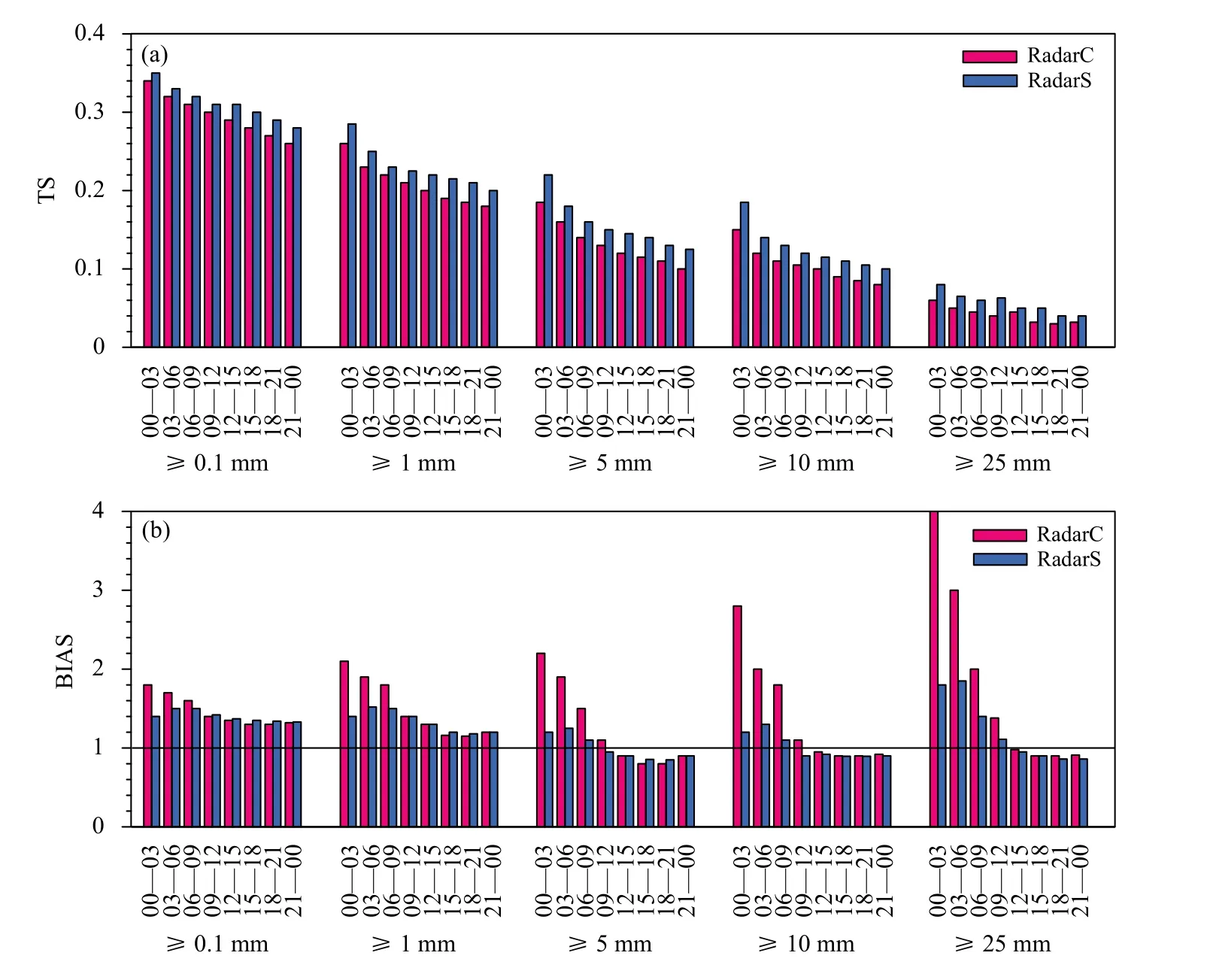
图8 2019 年6—8 月CMA-BJ 2.0 版系统9 km 分辨率逐3 h 累计降水预报的客观检验评分 (a.TS, b.BIAS)Fig.8 3 h accumulative precipitation forecast scores of CMA-BJ v2.0 verified against rain gauge observations in the 9 km domain from June to August 2019 (a.TS,b.BIAS)
4.3 中国全国风廓线观测资料的同化应用
基于前期研究基础,中国全国风廓线雷达观测(图5d)资料在CMA-BJ 2.0 版模式系统中作为一项重要更新正式纳入业务同化应用。
发展了面向资料同化应用的风廓线观测两步动态质量控制方案(Zhang,et al,2017)。第一步质量控制(QC1)为黑名单制度,即通过逐站计算观测和模式背景的相关系数并与预设的相关性阈值进行对比,相关系数小于相关性阈值的测站被认为观测质量整体较差,被直接纳入黑名单;第二步质量控制(QC2)为基于迭代再加权最小协方差行列式(IRMCD,Iterated Reweighted Minimum Covariance Determinant)方法的离群值剔除,即对于通过QC1 质量控制的测站,开展风廓线观测风场u、v二维分量的预报-观测偏差(即OMB)IRMCD 离群值判别,通过此步骤有效地剔除被判定为离群值的u、v分量OMB 观测,并使得留下的有效风廓线观测其OMB 满足资料同化要求的高斯分布。质量控制的具体流程见图9。
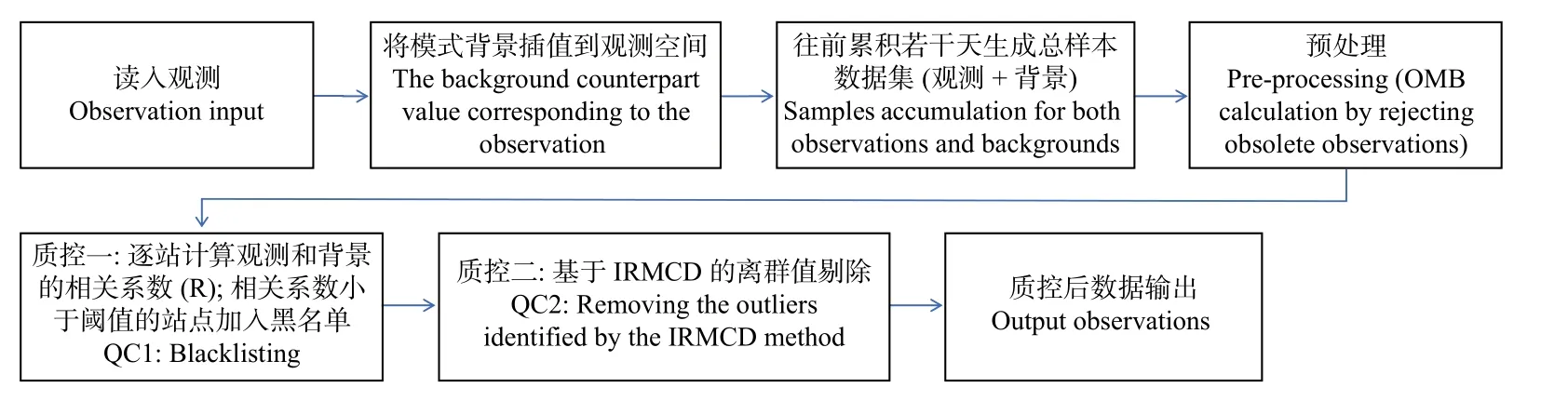
图9 风廓线观测资料质量控制流程Fig.9 Quality control process of wind profile observation data
在实际的质量控制流程中,黑名单和IRMCD离群值剔除步骤都是随时间滑动的动态过程,即对每部风廓线雷达通过执行新样本加入、旧样本退出的流程来保证其OMB 样本数据集中只包含最近3 个月内的观测。整体而言,黑名单步骤能够动态反映每个风廓线测站近期的质量状况,而为保证IRMCD 方法的有效性和统计显著性,对于积累的样本量也有一定的要求。QC1 步骤将整个剔除与背景场明显不相关的风廓线测站,而QC2 将剔除已通过QC1 但其OMB 被标记为离群值的风廓线观测。如图10 所示,风廓线观测数据经过两步质量控制后实际同化吸收率达到98%—99%,整体上满足变分同化的前提假设,表明质量控制基本达到了预计的效果。

图10 2018 年6 月10 日00 时—2018 年7 月1 日00 时 (世界时) 经过质量控制后的风廓线观测进入同化应用的记录数和u、v 同化吸收率Fig.10 Record number and u,v assimilation absorption rate of wind profiler observations entering the assimilation after quality control from 00:00 UTC 10 June to 00:00 UTC 1 July 2018
风廓线观测资料同化对于9 km 区域的高空u、v风场要素预报性能形成持续稳定的正效果,但对高空温度、湿度要素的影响并不显著(图略)。
基于Wang 等(2020)的工作,在风廓线观测的对流尺度同化方案中采用u、v取代常规的流函数、势函数为控制变量。但是在风廓线和雷达径向风观测均密集分布的地区,如覆盖中国华北地区的CMABJ 2.0 版系统的3 km 区域,风廓线观测和雷达径向风观测先后同化的策略具有更好的预报性能,即先同化常规GTS 资料,经过常规观测更新的分析场作为背景场,在第二步同时同化风廓线观测和雷达观测(径向风和反射率),更重要的是,该策略被证明能够更好地实现风廓线和雷达径向风观测资料的相互约束,具有更好的预报效果(Wang,et al,2022)。
5 结论和讨论
CMA-BJ 2.0 版是在原有的睿图-短期逐3 h 更新循环预报业务系统基础上发展的、区域逐时快速更新循环同化分析及短时预报业务系统。文中介绍了其逐时更新循环预报系统的关键技术特点及其相较于前一版本在资料同化方面的关键技术更新,主要包括如下几个方面:
(1)快速更新循环的同化背景场来自前次循环的1 h 预报,通常模式在积分1 h 后无法达到理想的平衡状态,导致更多高频噪声出现以及预报误差在多次循环后快速积累,对当次及后续循环的同化及预报造成不利影响。为解决该问题,发展了增量分析更新初始化方案并应用于CMA-BJ 2.0 版系统。
(2)在CMA-BJ 2.0 版系统运行流程构建方面,充分考虑各类观测资料实际到报截断时长的差异,发展了包括循环分析和更新预报两个部分耦合运行的逐时追赶循环运行框架,实现了对各类观测资料的充分高效利用,也较好地兼顾了短临预报服务对逐时更新循环预报产品的时效性要求。
(3)为保证在更新循环过程中模式预报的大尺度场不会因为多次循环误差累积而变形,发展了大尺度全球预报与区域模式中小尺度预报场的动态混合方案并应用于CMA-BJ 2.0 版系统,结果表明DFB 技术的应用较好地实现了全球模式大尺度场对区域模式中小尺度热力场发展的动态约束,对逐时更新循环模式的预报性能起到了正面影响。
(4)在雷达资料同化方面,CMA-BJ 2.0 版模式系统实现了对中国全国雷达反射率因子拼图观测资料的间接同化应用,并且针对其前一版本中因雷达资料连续循环同化造成水汽循环累积而导致的降水空报问题,从两方面入手对雷达同化策略开展了优化,一是仅在更新预报步骤开展雷达反射率资料同化,以规避连续循环同化造成的水汽正向过量累积;二是调整雷达同化时的背景场误差的方差和长度尺度,上述策略的应用有效提升了雷达反射率拼图资料同化的应用效果和降水预报性能。
(5)通过构建基于IRMCD 方案的两步质量控制方案,CMA-BJ 2.0 版系统实现了中国全国风廓线雷达观测资料的同化应用,并且在风廓线和雷达径向风观测均密集分布的地区采用雷达径向风与风廓线观测资料的同时同化,实现两类高时、空分辨率雷达风观测资料的相互约束。
CMA-BJ 2.0 版预报系统已于2021 年6 月正式业务运行,系统运行稳定,产品实时分发并应用于日常天气预报、预警业务。但在业务实践中也不断发现系统运行和资料同化中存在的问题和不足,如雷达资料连续循环同化造成水汽过量累积,为此正在开展雷达反射率同化算子及同化策略优化。同时,以应用于业务实践为目标的先进资料同化方法和技术(如多源观测资料的集合-变分混合同化、多源极轨卫星和静止卫星辐射率资料同化应用等技术)均在持续研发并即将形成业务应用能力,未来将成为CMA-BJ 区域数值预报业务系统不断改进完善的重要方面。
猜你喜欢
大自然探索(2023年7期)2023-08-15
农业灾害研究(2022年8期)2022-10-01
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年3期)2021-11-22
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
成都信息工程大学学报(2018年4期)2019-01-23
小学生学习指导(低年级)(2018年12期)2018-12-29
太空探索(2016年5期)2016-07-12
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07