
Research on restraint of human arm tremor by ball-type dynamic vibration absorber
2024-01-08 09:11YANGShangruZHANGXiaolongDONGYabinHEYumin
YANG Shangru,ZHANG Xiaolong,DONG Yabin,HE Yumin
(School of Mechanical and Electrical Engineering,Xi’an University of Architecture and Technology,Xi’an 710055,China)
Abstract:In order to reduce the impact of human arm tremor on patients,a ball-type dynamic vibration absorber is designed to reduce the amplitude of the tremor in the arm of the tremor patient.First,according to the relevant theories of biomechanics and vibration mechanics,the tremor of the human arm can be approximated as a spring-mass motion,and a vibration model of arm tremor is established.Secondly,the designed ball-type dynamic vibration absorber is installed on the arm of the tremor patient by using the principle of vibration control,and the mechanical vibration system of the arm tremor is established after the vibration absorber is installed.The dynamic equation of the system is deduced by using Lagrangian equation,and the basic principle of the vibration absorber for restraining arm tremor and the influence of the mass of the absorber on the restraining effect are analyzed theoretically.Finally,the arm movement displacement signals of tremor patients with or without shock absorber are tested by laser displacement sensor.The experimental results show that the designed ball-type dynamic vibration absorber can effectively suppress the tremor movement of the human arm,and its maximum tremor suppression efficiency can reach 57%.It can provide a new design scheme for the research of passive vibration suppression device.
Key words:tremor; human arm; vibration control; dynamic vibration absorber; ball
0 Introduction
The pathological tremor of the human arm is an involuntary vibration,and its motion law can be approximated as simple harmonic motion with a frequency of 2 Hz-12 Hz,which brings a lot of inconvenience to patients[1-2].In the medical treatment of tremor,drug therapy and surgical treatment are often used,but the scope of treatment is not suitable for all types of tremor.And the methods can not completely cure the tremor,and there are certain side effects[2].Therefore,more and more attention has been paid to the development of tremor suppression devices.
Common tremor suppression devices are divided into active and passive.The active vibration suppression device consists of a sensor that measures the vibration and an actuator that provides additional force.Rocon et al.[3-4]developed a wearable orthosis system that could be used for tremor assessment and suppression.It could suppress the tremor of the elbow,forearm and wrist of the upper limb.Zhang et al.[5]developed a mechanical arm-type vibration suppression device,which used magnetorheological dampers to change the damping characteristics of the joints in the arm,so as to achieve the effect of suppressing vibration.However,active tremor suppression devices are often difficult to achieve a good balance between structure and wearing.Therefore,attempts are being made to develop passive tremor suppression devices.
The passive tremor suppression device does not need sensors,motors,etc.So the structure is relatively simple,the size is small,the cost is relatively low,and the patient is more acceptable to wear.Rudraraju et al.[6]has developed a Tremelo-Essential tremor stabilizer using two vibration absorbers mounted on both sides of the arm.Elias M[7]designed a vibration suppression device,which achieved the purpose of suppressing vibration mainly by adjusting the damping size of the non-Newtonian fluid inside the damper.Buki[8]designed a tremor suppression bracelet (i.e.,Vib-bracelet) based on the principle of dynamic vibration absorption.The effectiveness of the device on tremor suppression is proved by simulation experiment and actual test on patients.
A passive device is proposed to suppress vibration by using a ball-type dynamic vibration absorber.According to the principles of biomechanical,human upper limb tremor can be regarded as a mechanical vibration system,or a mass-spring damping system[9].Adding a dynamic vibration absorber to the mechanical vibration system can control the vibration of the mechanical system,then adding a dynamic vibration absorber to the upper limb of the human body can suppress the tremor.In additon,the dynamic equation of the system is established,the dynamic principle of the tremor suppression is analyzed,and the effectiveness of the tremor suppression scheme is verified by the actual test of tremor patients.
1 Mechanical dynamics analysis of human arm tremor
In order to effectively suppress the tremor of the human arm,a ball-type dynamic vibration absorber for human arm tremor suppression is designed by improving the structure of mechanical ball-type dynamic vibration absorber.Its structure consists of a concentric ring (the outer diameter of the ring is 13 cm,the inner diameter is 9 cm) and a stainless steel energy-absorbing ball.It is installed on the patient’s arm,and the built-in energy-absorbing ball is used to generate relative motion with the inner track of the ring,so as to achieve the purpose of suppressing the tremor of the patient’s arm.Fig.1 is a structural diagram of a ball-type dynamic vibration absorber.
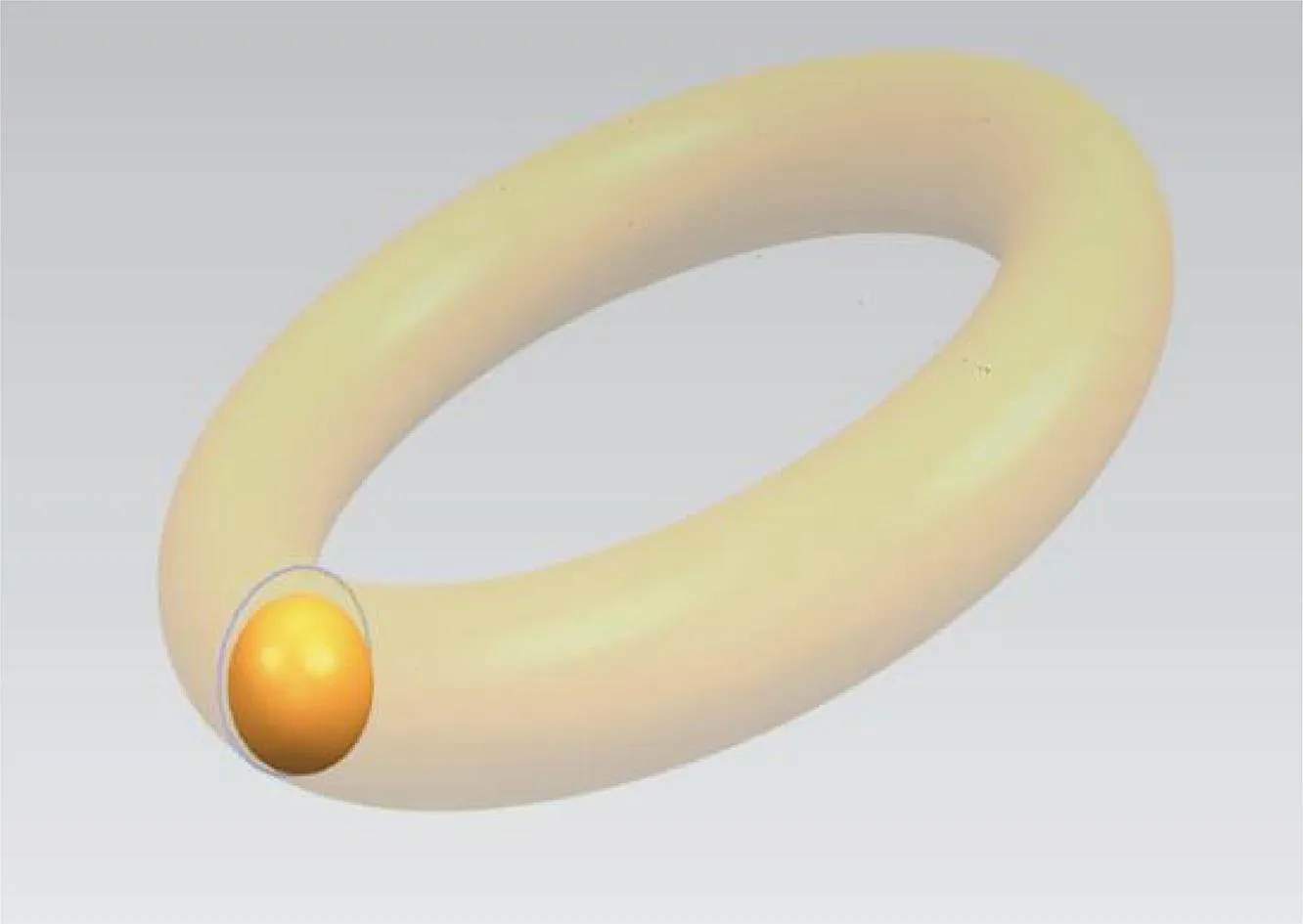
Fig.1 Ball type dynamic vibration absorber
1.1 Dynamics model
The tremor of the upper forearm of the human arm can be regarded as the vibration of a certain plane on both sides of the equilibrium position.Its mechanical vibration system model is shown in Fig.2.The dynamic model of the vibration absorber installed on the trembling arm is shown in Fig.3.

Fig.2 Simplified mechanical vibration model
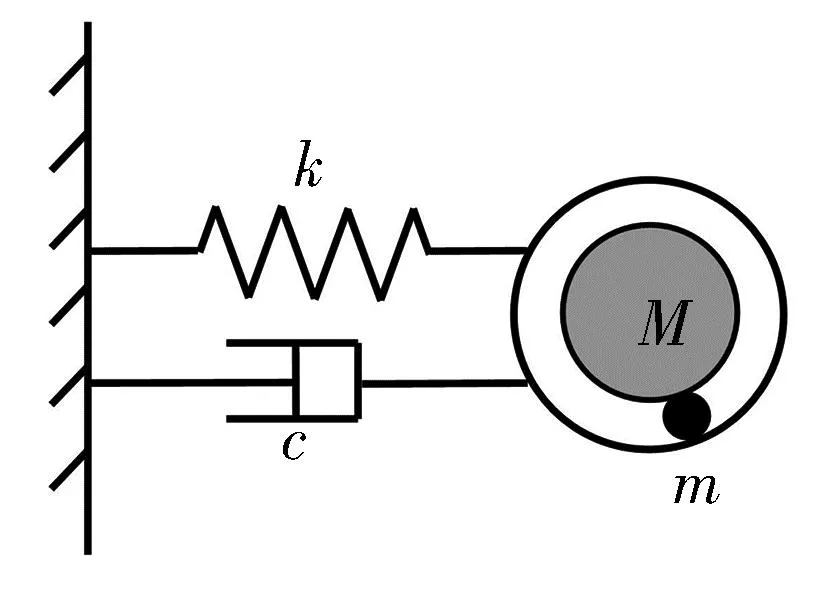
Fig.3 Model diagram after installing shock absorber
1.2 Dynamics analysis
For the simplify of analysis,the dynamic model of the tremor arm in Fig.3 after the vibration absorber is installed can also be expressed as the type in Fig.4.Mis the mass of vibrating arm,the concave surface is the circular orbit of the vibration absorber,and its radius isR.The mass of the built-in vibration-absorbing ball ism,the radius isr,and the moment of inertia around its diameter isI,the vibrating body is connected to the foundation with a spring of stiffnessk.The vibration damping of the upper forearm (arm) of the human body is difficult to determine.In order to apply the fixed-point theory to the vibration reduction principle of the shock absorber,the damping is abandoned[10].

Fig.4 Dynamic model of tremor arm with vibration absorber installed
When the arm is no tremor,the ball is always at the bottom point of the orbit in the vibration-absorbing ring,and the spring is in a balanced state (no expansion and contraction).The equilibrium position is set as the coordinate origin of the vibration absorption system,and the motion coordinate systemO-XYis established.The generalized coordinates take the displacement of the trembling arm (vibrating body) in the horizontal plane aszand the angular displacementθof the vibration-absorbing ball at the centerO′ of the vibration-absorbing ring.
In general,if the coordinate of the center of the vibration-absorbing ball in coordinate systemO-XYis (x,y),then
(1)
When the patient has a tremor,it is assumed that the vibration absorbing ball does not slide along the inner rail of the vibration absorbing ring,but only rolls,producing a movement opposite to the tremor movement.Assume that the vibration-absorbing ball rolls from the equilibrium position at the bottom of the arc surface to the position shown in Fig.5.When the rolling angle isφ,the motion relation of the ball in the vibration absorber is
(2)
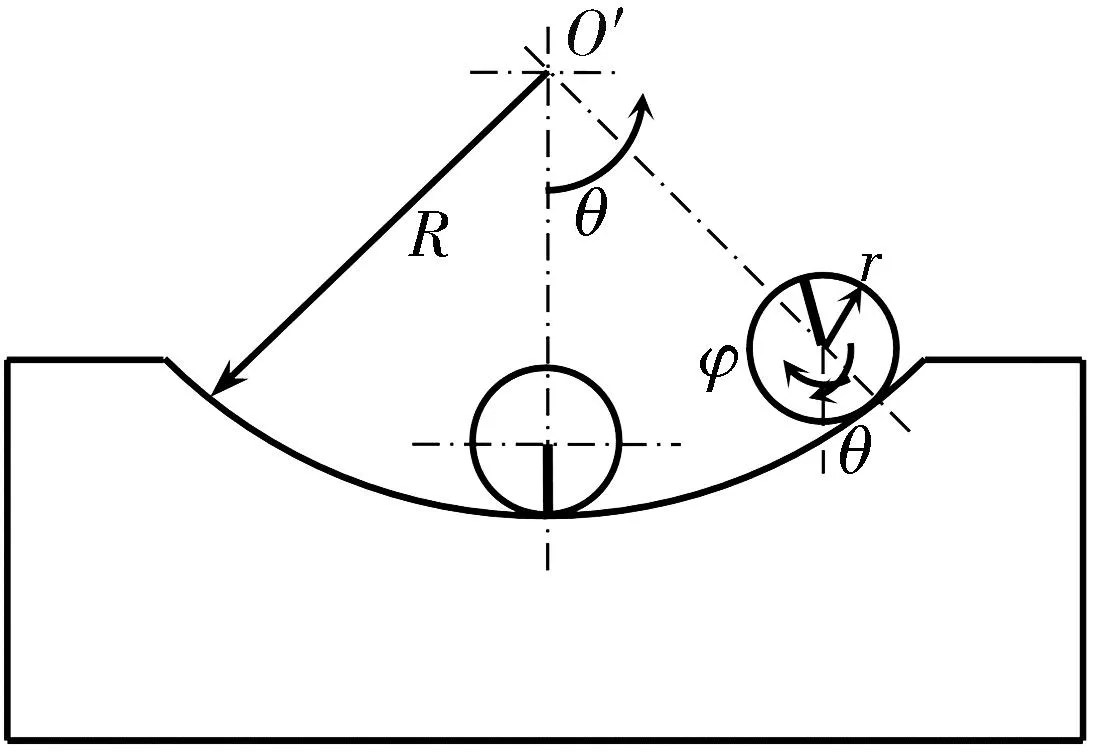
Fig.5 Rolling of vibration-absorbing ball in vibration absorber
The kinetic energyT,potential energyU,and dissipation functionVof the system are represented as
(3)
whereI=2mr2/5,andcbis the motion damping coefficient of the vibration-absorbing ball.In the process of arm tremor,the input force of the movement is provided by the human muscles,and approximate simple harmonic motion is done[11].The external excitationFcosωtof the vibrating body can be set.
According to the Lagrange equation,there is
(4)
(5)
Considering that the vibration-absorbing ball vibrates slightly near the orbit equilibrium position (θ=0),letθbe a tiny quantity (θ=O(ε)),take sinθ≈θ,cosθ≈1,ignoring high-order infinitesimal quantities such asO(ε3),then the Eq.(5) can be dimensionless to
(6)
where
(7)
whereδstis the static deformation of the main vibration system spring when static affect of external excitation force amplitudeF;ωnis the natural frequency of the main vibration system;pis the natural frequency of the vibration absorbing ball;ξis the damping ratio of the vibration-absorbing ball;λis the ratio of the excitation frequencyωto the natural frequencyωnof the main vibration system;ηis the ratio of the natural frequency of the main vibration system to the natural frequency of the vibration absorbing ball;μis the ratio of the vibration absorbing ball and the vibration body mass (M+m) to the body massM.
Assume that the solution of Eq.(6) is
z*=Z*cos(λt*+β),
θ*=Θ*cos(λt*+γ).
(8)
Substituting Eq.(8) into Eq.(6),the amplitude expressions of the vibration body and the vibration-absorbing ball can be obtained by
(9)
where the dimensionless parameter is
C=(1-μλ2).
(10)
It can be seen that the amplitudeZ*of the main system is closely related to the mass of the vibration-absorbing ball,as shown in Fig.6.The larger of the vibration system mass ratio (μ),the better suppression effect of the system amplitude.However,the selection of the actual mass ratio is limited to a certain extent.Too large mass ratio makes the overall structure of the vibration absorber larger,which is not suitable for the application scenario.Therefore,it should be determined comprehensively.In this paper,the main body of vibration is the forearm (arm) of the human upper limb,the mass is difficult to determine,and the mass of the ball is small.Therefore,the influence of mass change on the effect of vibration suppression is studied by changing the size and number of vibration-absorbing balls.
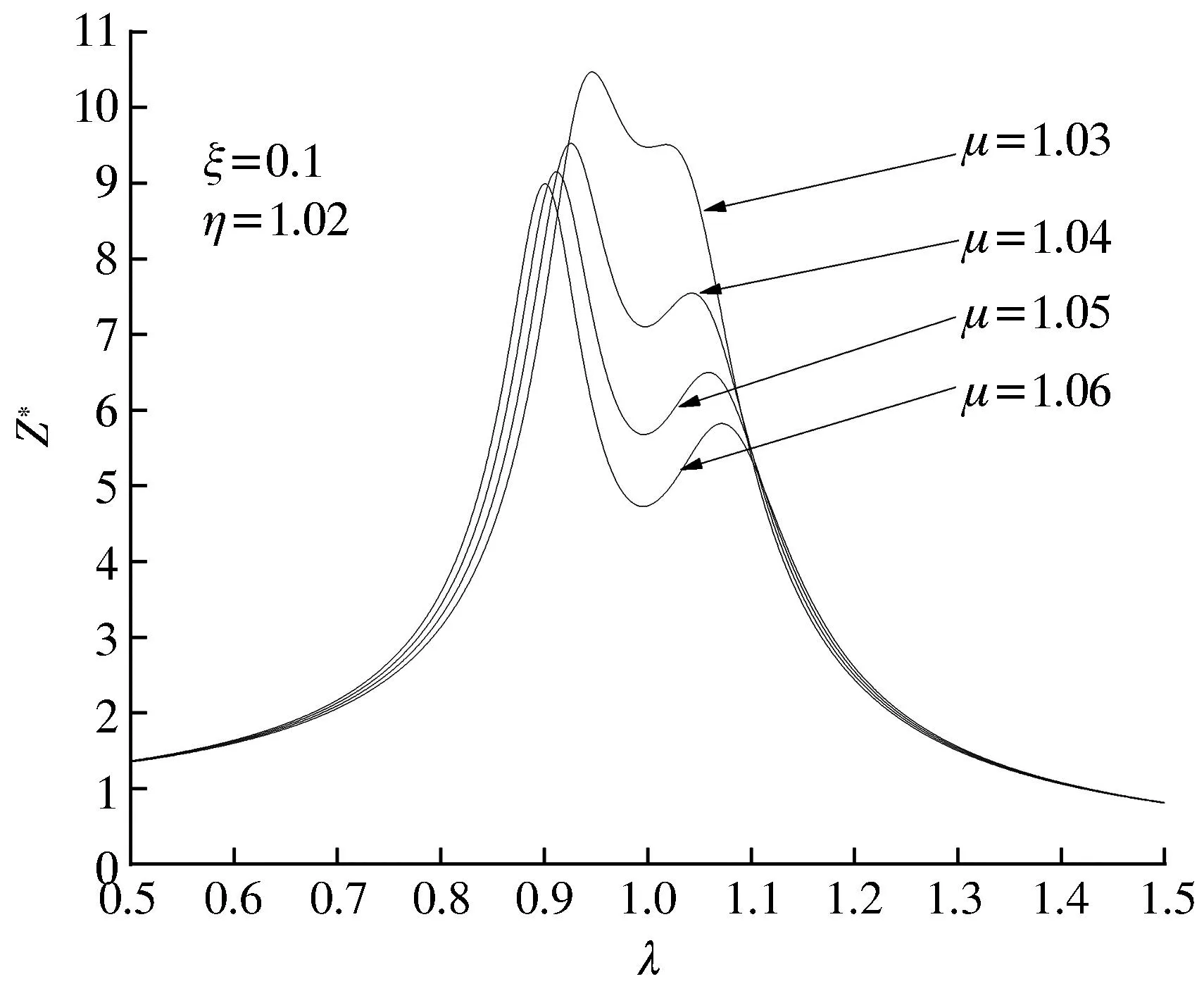
Fig.6 Influence of changing vibration-absorbing ball mass on system amplitude
2 Experiment
In order to verify the accuracy of the theoretical analysis and find a better quality of the vibration-absorbing ball for specific tremor patients,the tremor patients are selected for experimental testing.
2.1 Experiment process
The vibration absorber is a ring made of ABS,and the mass is 20 g.The vibration-absorbing ball is made of stainless steel,and its dimensions are 14.5 mm in diameter (its mass is 13 g),16.5 mm in diameter (its mass is 20 g),and 17.5 mm in diameter (its mass is 25 g).
Firstly,the tremor detection is performed on the patient without the vibration absorber installed,and the original displacement signal of the patient’s own tremor movement is obtained.Secondly,the vibration displacement is detected on the patient by installing the vibration absorber,and the test results of the tremor displacement are obtained when the vibration absorber of different quality is installed.The obtained displacement signals are analyzed in time domain and frequency domain to verify the feasibility of the designed ball vibration absorber and its tremor inhibition effect on the arm of tremor patients.The vibration absorber is mounted on the upper middle and upper part of the patient’s arm,and a KEYENCE laser displacement sensor is used by the measuring instrument.After the test starts,sampling begins when the tremor is stable.
2.2 Experimental test
Firstly,the experimental measurement is carried out on the patient without the dynamic vibration absorber.The displacement signal of the patient’s arm tremor is obtained,and it is used as the original signal of the tremor movement.The test results of patients without dynamic vibration absorbers are shown in Fig.7.
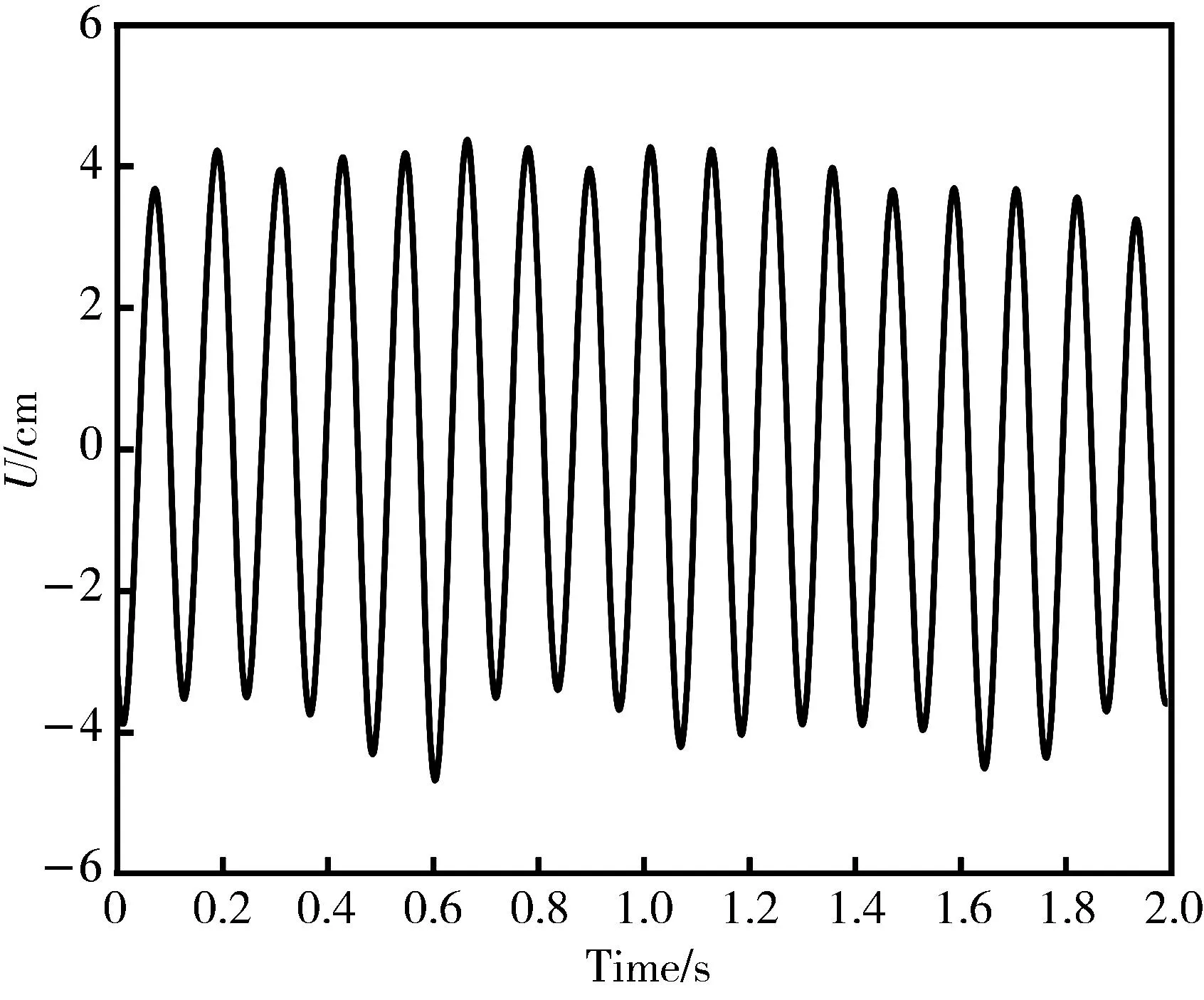
(a) Time domain diagram
The variation law of the displacement of the trembling arm over time without the vibration absorber and its FFT diagram are shown in Fig.7(a) and 7(b).It can be seen that the tremor is approximately a simple harmonic motion with a tremor frequency of 8.5 Hz and an amplitude of 3.852 cm.
After obtaining the original displacement signal of the patient’s arm tremor,a spherical dynamic absorber is installed to measure the patient.Three groups of vibration absorber test experiments with different masses are set up.
Experiment 1:The mass of the vibration absorber 1 is 45 g,and the size of the built-in energy-absorbing ball is 17.5 mm×1 in diameter.Experiment 2:The mass of the vibration absorber 2 is 80 g,and the size of the built-in energy-absorbing ball is 16.5 mm×3 in diameter.Experiment 3:The mass of the vibration absorber 3 is 95 g,and the size of the built-in energy-absorbing ball is 17.5 mm×3 in diameter.Fig.8 shows the experimental test results of patients with vibration absorbers of different masses.
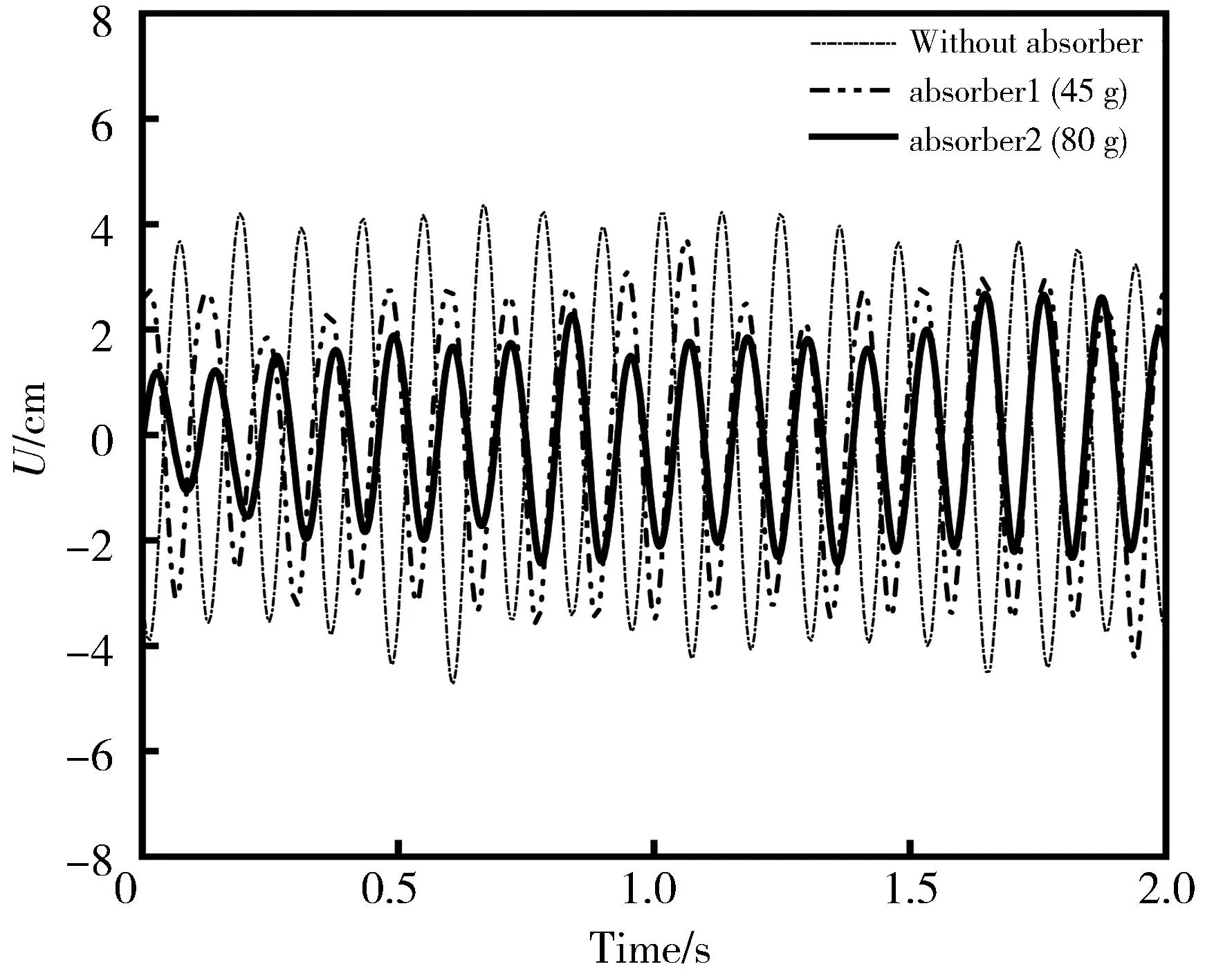
(a) Time domain diagram of experimental test of vibration absorber 1-2 group
The test results of the vibration displacement when the vibration absorbers of different masses are installed are shown in Fig.8 (a) and 8(b).The vibration displacement is significantly reduced after the vibration absorber is installed,and it decreases with the increase of the vibration absorber mass.However,as the mass of the vibration absorber ball increases further,the vibration displacement increases instead.It shows that there is an optimal vibration-absorbing ball mass that minimizes the tremor displacement for a specific tremor patient.Therefore,it is concluded that the vibration absorber 3 is the best combination of performances of the vibration absorber for the vibration damping.
The patient’s tremor frequency is basically maintained at 8.5 Hz in Fig.8(c).The three groups of different vibration absorbers have different effects on the amplitude of the patient’s arm tremor.The first group of vibration absorbers is 25%.The second group is 57%.The third group is 26% (the frequency has been increased to 9 Hz),and the variation law of the amplitude with the mass of the ball is consistent with the conclusions in Fig.8(a) and 8(b).Therefore,the best suppression result is a reduction of 57%.
3 Conclusions
Suppressing human arm tremor by using mechanical ball type dynamic vibration absorber is discussed.A ball-type dynamic vibration absorber is designed by improving the structure of the mechanical ball-type dynamic vibration absorber,which can be installed on the arm of a patient with tremor.Through the movement of the vibration absorbing ball in the circular orbit of the vibration absorber,the tremor movement of the patient’s arm can be suppressed.
An experimental prototype of passive tremor suppression device based on mechanical dynamic shock absorber is designed,manufactured and tested.The device has a simple structure,is easy to wear,and can effectively inhibit the tremor of the patient’s arm.It is verified that the designed ball-type dynamic vibration absorber can effectively suppress the tremor of the upper forearm of the human body through the experimental test on tremor patients.In experimental tests,the amplitude of tremor in the arm of suppressed patients is reduced by up to 57%,and the optimal value of the design of the shock absorber mass is 80 g.
 Journal of Measurement Science and Instrumentation2023年4期
Journal of Measurement Science and Instrumentation2023年4期
- Journal of Measurement Science and Instrumentation的其它文章
- A synchronous scanning measurement method for resistive sensor arrays based on Hilbert-Huang transform
- A covert communication method based on imitating bird calls
- Remote sensing images change detection based on PCA information entropy feature fusion
- An image dehazing method combining adaptive dual transmissions and scene depth variation
- Drive structure and path tracking strategy of omnidirectional AGV
- Electro-hydraulic servo force loading control based on improved nonlinear active disturbance rejection control