
下肢康复机器人训练联合镜像疗法对脑卒中偏瘫患者步态控制的影响
2024-01-08 10:14王莉娜陈志琴董文敏
海军医学杂志 2023年11期
王莉娜,陈志琴,董文敏
脑卒中具有致残率高的特点,其中下肢运动功能障碍是脑卒中患者常见后遗症,严重影响患者正常工作和生活[1]。下肢康复训练是脑卒中偏瘫患者早期康复的重要环节,临床主要采用步行能力训练、站立平衡训练、关节活动训练及生活活动能力训练等常规康复训练,恢复患者运动功能。目前,常规康复训练尚不能达到临床满意效果[2],仍需探索新的康复方法。下肢康复机器人训练采用电机带动患者进行正常步态训练,将迈步、负重、平衡相结合,能够刺激下肢关节肌腱肌肉感受器,促进感觉恢复[3]。镜像疗法是一种镜像视觉回馈疗法,其理论基础与镜像神经元系统有关,依据镜像反射原理产生视错觉,调动患肢模仿健侧肢体运动[4]。然而,下肢康复机器人训练联合镜像疗法用于脑卒中偏瘫患者能否提高步态训练效果尚不清楚,鉴于此,本研究探究下肢康复机器人训练联合镜像疗法对脑卒中偏瘫患者步态控制的具体影响。
1 对象与方法
1.1 研究对象 选取2019 年5 月至2021 年12 月苏州明基医院收治的84 例脑卒中偏瘫患者作为研究对象,随机将其分为A 组、B 组和联合组,每组各28 例。3 组患者基本资料比较差异无统计学意义(P>0.05),具有可比性。见表1。

表1 A、B 组和联合组患者基本资料比较
纳入标准:均符合《中国脑卒中早期康复治疗指南》中脑卒中偏瘫[5]诊断标准;均为初次发病;均为单侧偏瘫;年龄20~80 岁;病程<3 个月;意识清楚;均知情同意。排除标准:骨折患者;踝关节畸形患者;精神疾病患者;心肝肾严重功能障碍患者;依从性差患者。本研究患者及其家属均知情同意,并获得医院伦理委员会批准。
1.2 方法 3 组患者均给予常规康复训练[6],包括步行能力训练、站立平衡训练、关节活动训练、卧-坐转移训练、翻身训练和生活活动能力训练,每次训练40 min,1 次/d,5 次/周。
A 组患者另给予下肢康复机器人训练,采用台湾上银科技HIWIN MRG-P100 下肢机器人步态训练系统,根据患者病情设定训练强度,系统根据设定值实时调整减重架高低,采用悬吊装置减重系统支撑患者,将患肢固定于机械腿上,采用足部升降带固定双侧踝关节,减重支持水平为50%~60%,步速为1.25~1.80 km/h,训练时间为30 min,1 次/d,5 次/周,训练过程中出现身体不适立即停止训练。B组患者另给予镜像疗法,选择安静环境治疗,患者取端坐位,双足着地,双下肢之间垂直放置一面平面镜,镜面正面对向健侧,背面对向患侧,躯体略偏向于健侧,便于观察镜中运动成像。健侧肢体进行踝关节外翻,髋关节屈曲伸展,足跟触地,踝关节背屈等训练,并逐渐加大幅度,利用视错觉,尝试患侧做健侧相同动作,试图完成双侧对称活动,30 min/次,1 次/d,5 次/周。联合组患者另给予下肢康复机器人训练和镜像疗法,方法同A、B 组。3 组患者均训练4 周。
1.3 观察指标 (1)步行时空参数。比较3 组患者步行时空参数,分别于治疗前后采用SAB-GAIT三维步态分析仪(北京赛博飞特信息技术有限公司)测定患者步行时空参数,患者在走廊直线行走12 m,通过系统软件采集其步宽、步速、步频和步幅。(2)Holden 步行功能分级。于治疗前后根据步行表现评估患者Holden 步行功能分级,0 级不能步行(0 分),1 级需1 人帮助步行(1 分),2 级需接触1 人身体步行(2 分),3 级需1 人指导步行(3 分),4 级平地独立行走(4 分),5 级任何地方均可独立行走(5 分)[6]。(3)踝背屈角、内翻角[7]。于治疗前后采用角度计测量患者踝背屈角(以足外缘与腓骨纵轴线交界为轴心,测量腓骨纵轴与第五跖骨夹角),采用关节活动测量尺测定患者内翻足底与下肢的夹角,均测量3 次,取平均值。(4)Berg 平衡功能量表评分、Barthel 指数评分。于治疗前后评估患者Berg平衡功能量表评分、Barthel 指数评分。Berg 平衡功能量表评分包括单腿站立、独立坐、独立站立、床椅转移等14 项内容,总分56 分,分数越高表示平衡功能越好[8]。Barthel 指数评分包括大小便控制、上下楼梯、洗澡、吃饭、穿衣等10 项内容,总分100 分,分数越高表示自理能力越强[9]。
1.4 统计学处理 应用SPSS 22.0 统计软件分析所得数据。符合正态分布的计量资料采用±s表示,多组间比较采用方差分析,两两比较行LSD-t检验,组内治疗前后比较行配对t检验;计数资料采用例数和百分比(%)表示,行χ2检验,若理论频数为1~5 则需校正,等级分布资料行秩和检验。P<0.05 表示差异有统计学意义。
2 结果
2.1 A、B 组和联合组患者步行时空参数比较 治疗前,3 组患者步行时空参数比较差异无统计学意义(P>0.05)。治疗4 周后,3 组患者步宽较治疗前均减小(P<0.05),且联合组小于A、B 组(P<0.05);步速、步频、步幅较治疗前均升高(P<0.05),且联合组均高于A、B 组(P<0.05)。但A、B 组治疗后步行时空参数比较差异无统计学意义(P>0.05)。见表2。
表2 A、B 组和联合组患者步行时空参数比较(± s)
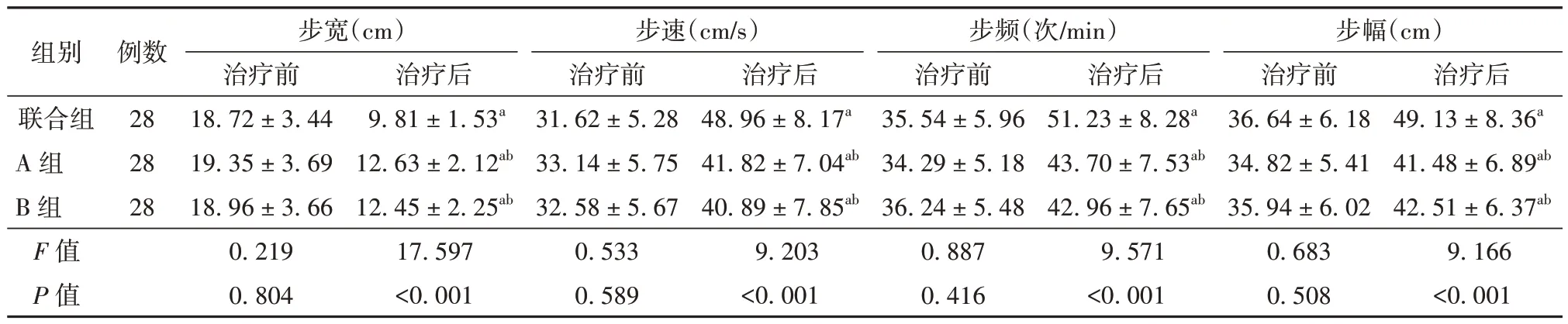
表2 A、B 组和联合组患者步行时空参数比较(± s)
注:与治疗前比较aP<0.05;与联合组比较bP<0.05
组别联合组A 组B 组F 值P 值例数28 28 28步宽(cm)治疗前18.72 ± 3.44 19.35 ± 3.69 18.96 ± 3.66 0.219 0.804治疗后9.81 ± 1.53a 12.63 ± 2.12ab 12.45 ± 2.25ab 17.597<0.001步速(cm/s)治疗前31.62 ± 5.28 33.14 ± 5.75 32.58 ± 5.67 0.533 0.589治疗后48.96 ± 8.17a 41.82 ± 7.04ab 40.89 ± 7.85ab 9.203<0.001步频(次/min)治疗前35.54 ± 5.96 34.29 ± 5.18 36.24 ± 5.48 0.887 0.416治疗后51.23 ± 8.28a 43.70 ± 7.53ab 42.96 ± 7.65ab 9.571<0.001步幅(cm)治疗前36.64 ± 6.18 34.82 ± 5.41 35.94 ± 6.02 0.683 0.508治疗后49.13 ± 8.36a 41.48 ± 6.89ab 42.51 ± 6.37ab 9.166<0.001
2.2 A、B 组和联合组患者Holden 步行功能分级及踝背屈角、内翻角比较 治疗前,3 组患者Holden步行功能分级及踝背屈角、内翻角比较差异无统计学意义(P>0.05)。治疗4 周后,3 组患者Holden 步行功能分级及踝背屈角均增大,且联合组大于A、B组(P<0.05);内翻角均减小,且联合组小于A、B 组(P<0.05);但A、B 组治疗后Holden 步行功能分级及踝背屈角、内翻角比较差异无统计学意义(P>0.05)。见表3。
表3 A、B 组和联合组患者Holden 步行功能分级、踝背屈角、内翻角比较(± s)

表3 A、B 组和联合组患者Holden 步行功能分级、踝背屈角、内翻角比较(± s)
注:与治疗前比较aP<0.05;与联合组比较bP<0.05
组别联合组A 组B 组F 值P 值例数28 28 28 Holden 步行功能分级(分)治疗前2.65 ± 0.56 2.69 ± 0.60 2.70 ± 0.61 0.056 0.945治疗后3.89 ± 0.41a 3.05 ± 0.51ab 3.10 ± 0.42ab 30.848<0.001踝背屈角(°)治疗前5.37 ± 0.86 5.52 ± 0.94 5.59 ± 0.89 0.439 0.646治疗后11.79 ± 1.66a 9.06 ± 1.48ab 9.10 ± 1.52ab 28.343<0.001内翻角(°)治疗前14.96 ± 2.42 15.31 ± 2.61 15.10 ± 2.77 0.128 0.880治疗后7.35 ± 1.27a 10.28 ± 1.53ab 9.89 ± 1.75ab 30.307<0.001
2.3 A、B 组和联合组患者Berg 平衡功能量表评分和Barthel 指数评分 治疗前,3 组患者Berg 平衡功能量表评分、Barthel 指数评分差异无统计学意义(P>0.05)。治疗4 周后,3 组患者Berg 平衡功能量表评分、Barthel 指数评分较治疗前均升高(P<0.05),且联合组高于A、B 组(P<0.05);但A、B 组患者治疗后Berg 平衡功能量表评分、Barthel 指数评分比较差异无统计学意义(P>0.05)。见表4。
表4 A、B 组和联合组患者Berg 平衡功能量表评分、Barthel 指数比较(分, ± s)
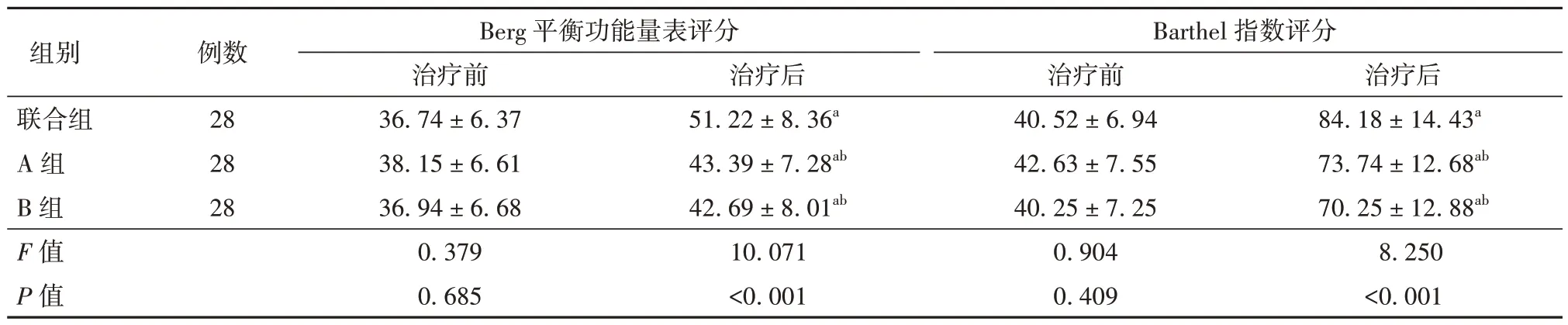
表4 A、B 组和联合组患者Berg 平衡功能量表评分、Barthel 指数比较(分, ± s)
注:与治疗前比较aP<0.05,与联合组比较bP<0.05
组别联合组A 组B 组F 值P 值例数28 28 28 Berg 平衡功能量表评分治疗前36.74 ± 6.37 38.15 ± 6.61 36.94 ± 6.68 0.379 0.685治疗后51.22 ± 8.36a 43.39 ± 7.28ab 42.69 ± 8.01ab 10.071<0.001 Barthel 指数评分治疗前40.52 ± 6.94 42.63 ± 7.55 40.25 ± 7.25 0.904 0.409治疗后84.18 ± 14.43a 73.74 ± 12.68ab 70.25 ± 12.88ab 8.250<0.001
3 讨论
脑卒中偏瘫患者脑损伤后会使高位中枢神经系统受损,导致下肢运动功能异常,严重影响患者日常生活能力[10]。临床研究发现,脑组织和结构具有重塑性,适当条件下能够使部分神经元再生。因此,康复训练对脑卒中偏瘫患者预后影响较大[11]。康复训练在脑卒中偏瘫患者下肢运动功能恢复中具有重要作用,传统康复训练尽管能够改善患者步行能力,但整体康复效果仍有待进一步提高[12]。当前,关于脑卒中偏瘫患者康复训练的方法仍在不断探索。
镜像疗法结合运动想象为患者提供直观的视觉反馈,有助于启动大脑中支配患侧肢体的神经元,中枢神经系统可以储存运动模式图,可作为患侧肢体运动训练的参照,利用视觉刺激的感官效果指导患侧肢体训练,在临床应用中具有方法简单、成本低的优势[13]。本研究中联合组步宽小于A、B组,步速、步频、步幅均高于A、B 组,且联合组Holden 步行功能分级改善情况优于A、B 组,提示下肢康复机器人训练、镜像疗法用于脑卒中偏瘫患者能够提高步行能力,且联合使用效果更好。分析原因可能是镜像疗法改善偏瘫康复效果的机制主要包括激活镜像神经元系统,促进神经可塑性和运动想象,从而实现对受损肢体的运动恢复和改善。
镜像疗法的核心在于激活人体的镜像神经元系统,使得大脑认为身体正在执行该动作。通过观察健康的肢体运动或使用镜面反射,可以激活镜像神经元系统,促进受损肢体的运动恢复。此外,镜像疗法通过让患者观察到镜中的运动,刺激大脑增强其神经可塑性。通过反复观察和模仿运动,可以增强神经回路的连接性和协调性,促进受损部分的再生和功能恢复。镜像疗法还鼓励患者进行运动想象,即通过想象自己在运动来刺激大脑。运动想象可以激活相应的脑区,促进神经信号传导和功能恢复。通过观察镜中的运动并与运动想象相结合,可以增强受损肢体的运动控制力和协调性[14]。研究证实,镜像疗法将镜面成像的视觉信息与自体动作的本体感觉信息进行整合,形成传出-传入通路,使大脑神经元微小放电,进而使患肢肌肉主动屈伸产生运动信号,通过反复训练,恢复破坏通路[15]。下肢康复机器人是一种常用于偏瘫患者康复的新型康复设备,它可以通过自动化的方式帮助患者进行康复训练,促进受损肢体的功能恢复和改善。康复机器人训练能够提供高强度、高频率的运动训练,患者可以在机器人的帮助下反复进行下肢运动。这种重复性训练可以刺激受损神经和肌肉组织的重新生长和修复,促进下肢运动功能恢复。此外,康复机器人配备了多种传感器,能够实时监测患者的肌肉活动和运动轨迹等生物信息,并通过图像、声音等形式向患者提供反馈。这种生物反馈可以帮助患者更好地控制肌肉活动和运动姿势,促进协调性和精准度,提高下肢运动的恢复效果。因此,下肢康复机器人训练联合镜像疗法用于脑卒中偏瘫患者效果显著。
本研究结果显示,治疗后联合组踝背屈角大于A、B 组,Berg 平衡功能量表评分、Barthel 指数评分高于A、B 组,内翻角小于A、B 组,说明下肢康复机器人训练联合镜像疗法用于脑卒中偏瘫患者有助于矫正踝背屈和足内翻,且提高患者日常生活能力。相关研究表明,镜像疗法能够更大程度激活镜像神经元系统,指导患肢正确执行健侧肢体动作,提高运动表现[16]。镜像疗法主要采用视觉刺激、重复想象力和心理训练,通过镜像反射运动激活同侧大脑半球运动区域,并激活患侧大脑神经元,促进神经组织功能重组和再生,补偿运动缺陷[17]。镜像疗法在动作观察、想象、学习、模仿中具有重要作用,能够促进患肢移动、恢复平衡功能,从而提高日常生活活动能力[18]。镜像疗法简单易学,可重复性强,能够根据患者病情进行针对性训练,且医疗费用低,患者治疗依从性高[19]。而下肢康复机器人训练在偏瘫康复中具有以下优点:提供早期康复服务,在患者身体条件尚不允许进行传统的人工康复训练时提供帮助,促进早期康复;下肢康复机器人配备了多种训练模式,满足患者不同阶段和不同需求的康复训练。通过调整训练模式,可以有针对性地进行伸展、收缩、强化等运动,有针对性地矫正踝背屈和足内翻。康复机器人可以通过游戏化的界面设计,激发患者训练的积极性和动力,增加康复训练的乐趣和吸引力,有助于其更好地坚持训练,并提高康复效果[20]。
综上所述,下肢康复机器人训练联合镜像疗法用于脑卒中偏瘫患者能够提高步行能力,改善生活质量。然而,本研究纳入样本较少,仍需扩大样本量进一步证实研究结果。
猜你喜欢
中国民间疗法(2021年19期)2021-11-20
今日农业(2021年4期)2021-06-09
公民与法治(2020年20期)2020-11-27
当代党员(2020年20期)2020-11-06
小康(2018年23期)2018-08-23
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
湖北体育科技(2016年11期)2016-02-27
中国康复理论与实践(2015年10期)2015-12-24
小康(2015年4期)2015-03-31
中国中医药现代远程教育(2014年14期)2014-03-01
