
阴影条件下电动汽车太阳能电池板最大功率跟踪方法
2024-01-06 10:37黄东宇
廊坊师范学院学报(自然科学版) 2023年4期
黄东宇
(阜阳职业技术学院,安徽 阜阳 236031)
0 引言
电动汽车的动力来源之一是太阳能,而太阳能电池板是最重要的组成部分。然而,由于太阳能电池板自身特性和光伏系统结构等因素[1-2],当太阳辐射强度、环境温度、光照强度以及电池板运行状态发生变化时,光伏电池板会出现局部过热现象[3-4],从而降低光伏电池板的效率,因此,需要对其进行最大功率跟踪控制。由于光伏电池板自身特性的限制,传统跟踪方法在实际应用中存在一些不足:(1)在不同天气条件、不同太阳辐射强度情况下,都无法准确测量光伏电池板输出电流与电压之间关系;(2)在户外阴雨天气时,环境温度较低将导致光伏电池板输出电流小;(3)当光伏电池板在阴影条件下工作时将会降低系统效率。因此解决阴影条件下太阳能电池板大功率精准跟踪问题,成为当下研究的热点。基于此,本文提出一种全新的跟踪方法。
1 方法的实现与分析
1.1 建立阴影条件下的电动汽车太阳能电池板工作模型
考虑到电动汽车太阳能电池板工作输出电能主要用于串联封装电池组供给,因此在阴影条件下的工作模型可以参考串联电池组的工作模型,则其V-I伏安特性曲线[5-6]的变化与阴影条件变化及其太阳能电池板表面温度变化有关,即I=f(V,S,T)[7],其中I表示太阳能电池板电流,V表示太阳能电池板电压,S表示太阳能电池板面积,T表示太阳能电池板运行时间,f(·)表示伏安特性曲线的函数关系。一般情况下,电池板在额定温度下的工作最大输出电流为Isc,额定温度下的工作最大输出电压为Voc,峰值温度下的工作最大输出电流为Im,峰值温度下的工作最大输出电压为Vm。因此可通过已知的电压与电流在阴影条件下的参量关系,构建阴影条件下的电动汽车太阳能电池板I-V,P-V特性曲线,以此获得工作模型所需参量。
电动汽车太阳能电池板等效作业电路如图1所示。图中电路模型关系式可以表达为:

图1 电动汽车太阳能电池板等效作业电路
式中:Iph代表太阳能电池板电流;Io代表饱和电流反向系数;q代表电荷数量;γ代表半导因子;K代表玻耳兹曼常数;Rs代表串联阻抗系数值;Rsh代表并联阻抗系数。
1.2 基于动态领导的太阳能电池板最大功率跟踪策略
考虑到电池板工作状态下的功耗控制受环境因素影响较大[8],精准跟踪控制难度较大,因此为了提高最大功率跟踪的收敛效果,通过引入动态领导者来改善电池板的功率输出效果,引导不同区域下太阳板模块优化器之间的合作效率,帮助电池板尽最大可能利用太阳能,实现最大功率稳定跟踪的收敛控制效果[9],以提高电动汽车的续航里程和能源利用效率。在这种方法中,动态领导者是根据太阳能电池板的工作条件和传感器反馈信息来实时调整整个系统的工作状态。动态领导者的引入能够提高系统的适应性和鲁棒性,以应对可能存在的阴影效应或其他干扰因素。
首先,动态选取当前时间点所对应最优解的太阳能模块优化器作为动态指标量,当确定一个分量优化器作为动态指标后,将其对应的自适应函数与最优解同步到相邻分量优化器。然后,相邻优化器会以同步的最优解替换当前最优解,以此更新对应的适应函数并继续迭代。在太阳能光伏电站中,系统需要实时跟踪太阳能电池板的最大功率点。为了提高跟踪效率并减少计算资源的使用,可以使用分量优化器和动态指标来引导优化过程。为了使该过程不会影响跟踪效率,设计策略中将分量优化器进行策略编制,按照3:1的关系约束迭代参量[10-11],即三次迭代对应执行一次引导策略,具体流程为:确定动态指标量,如式(2)所示。
式中:L代表动态指标量;代表第o个分量优化器对应第3k次迭代计算后所得最优解的适应度函数;n代表分量优化器总数。
当完成三轮迭代后,执行一次引导策略,更新整个解空间或搜索范围。其关系函数为:
通过限制引导策略的执行频率,可以减少引导策略的计算开销和时间消耗,从而提高整体系统的跟踪效率。
1.3 最大功率跟踪补偿
尽管动态领导者可以根据环境变化实时调整工作状态,但由于环境条件的快速变化或较大波动,考虑到在对最大功率跟踪过程中,领导者的动态调整可能存在滞后现象,使跟踪信号会受到阴影条件与串联阵列电流值的波动影响[12-13],出现总功率损失的问题,导致系统跟踪性能下降,为了减小跟踪功率损失对跟踪信号的影响,对不同阴影情况下最大功率跟踪进行补偿计算,使系统能够在最佳工作点实现最大功率输出,提高整体能源转换效率。补偿基于阴影条件下光伏阵列[14-15]与太阳能电池板工作最大功率点关系,通过对光伏阵列下太阳能电池板输出电流IL按照不同阴影条件进行控制,划分阴影情况的依据是太阳能电池板上遭受阴影的范围和影响程度,设置为无遮挡条件下阴影集合Ω1与遮挡条件下阴影集合Ω2。具体优化过程如下:
此时,跟踪Ω1与Ω2下太阳能电池组件所对应太阳能电池板处于工作最大功率点A2与B2,且跟踪Ω1与Ω2下太阳能电池组件所对应工作电路进行电能补偿,通过工作电路补偿低于的跟踪信号电流值,Ω1下太阳能电池组件所对应工作电路减压后的跟踪电流为:
Ω1下太阳能电池组件所对应工作电路减压后跟踪功率为:
Ω2下太阳能电池组件所对应工作电路减压后跟踪电流为:
Ω2下太阳能电池组件所对应工作电路减压后跟踪功率为:
假设Ω1由ɑ个太阳能电池组件构成,Ω2由b个太阳能电池组件构成,当满足条件ɑ+b=N时,经过对太阳能电池板工作电路减压补偿后,光伏阵列所对应的跟踪信号最大输出功率PL_max,ch为:
因此,无遮挡条件下太阳能电池板光伏阵列的最大输出功率与局部遮挡条件下阴影集合Ω1及集合Ω2下光伏阵列单元所对应工作电路同时充电补偿后的光伏阵列跟踪信号输出差值功率为:
至此得到了补偿差值,根据补偿差值能够准确调整跟踪参数,进而获得稳定、准确的跟踪效果。通过上述最大功率跟踪补偿流程,可以实现最大功率跟踪补偿并减小跟踪功率损失对跟踪信号的影响,从而提高太阳能电池板系统的性能和效率。由此,完成阴影条件下的电动汽车太阳能电池板最大功率跟踪,具体流程如图2所示。

图2 阴影条件下的电动汽车太阳能电池板最大功率跟踪流程
2 应用测试
对提出的方法进行仿真测试。通过在仿真模拟环境下与另外两种不同方法的性能对比,得出测试结论。其中,作为对比的两种跟踪方法,分别为基于集体智慧的电动汽车太阳能电池板最大功率跟踪方法和基于机器学习的光伏电池板最大功率跟踪方法,在测试过程中分别简称为对比方法1 与对比方法2,本文提出方法作为实验验证的目标方法,在测试过程中简称为目标方法。
2.1 设置测试条件
测试场景、测试过程与参量统计配置基于Matlab/Simulink仿真测试工具,仿真测试环境温度采用恒定温度条件作为测试标准,在该条件下利用随机参量完成对比方法1、对比方法2、目标方法的跟踪效果调试分析。电动汽车太阳能电池板本体参数设置如表1所示。
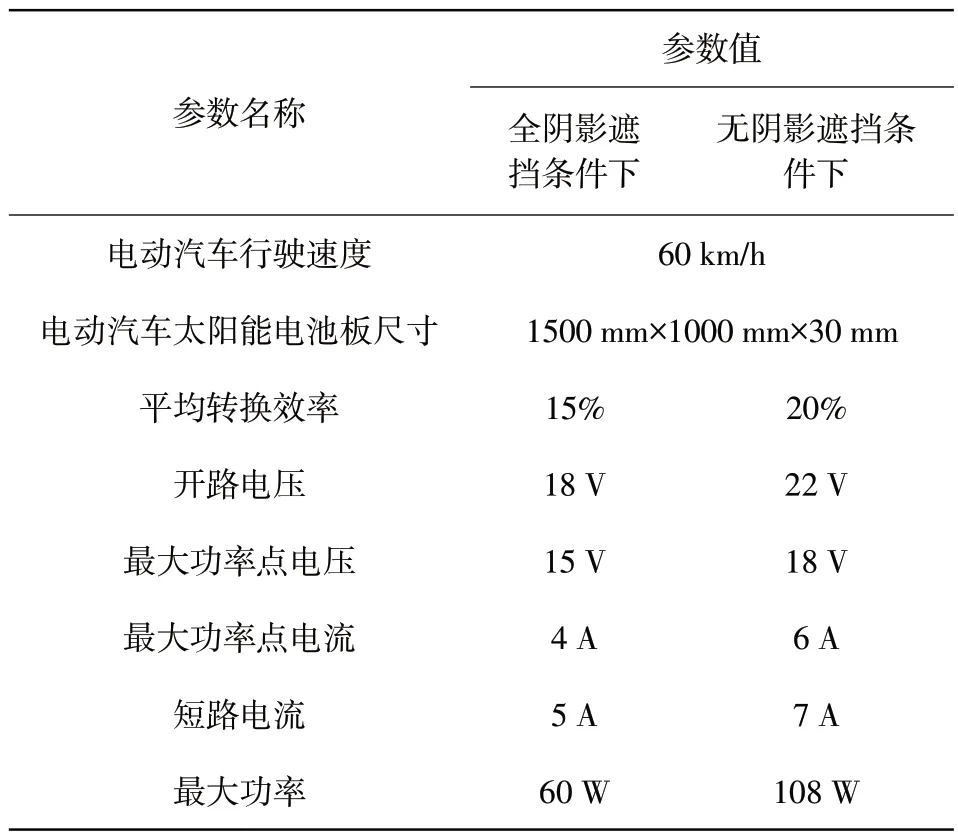
表1 电动汽车太阳能电池板本体参数
其中测试样本抽取数据库规模大小设定为3000,测试最大迭代次数imax=10,恒定稳定条件下的温度设定为26 ℃,模拟光照峰值强度为1500 W/m2和25 ℃。按照设定参量分别生成无遮挡条件、局部遮挡条件与全遮挡条件下的太阳能电池板最大功率信号跟踪图谱,如图3所示。
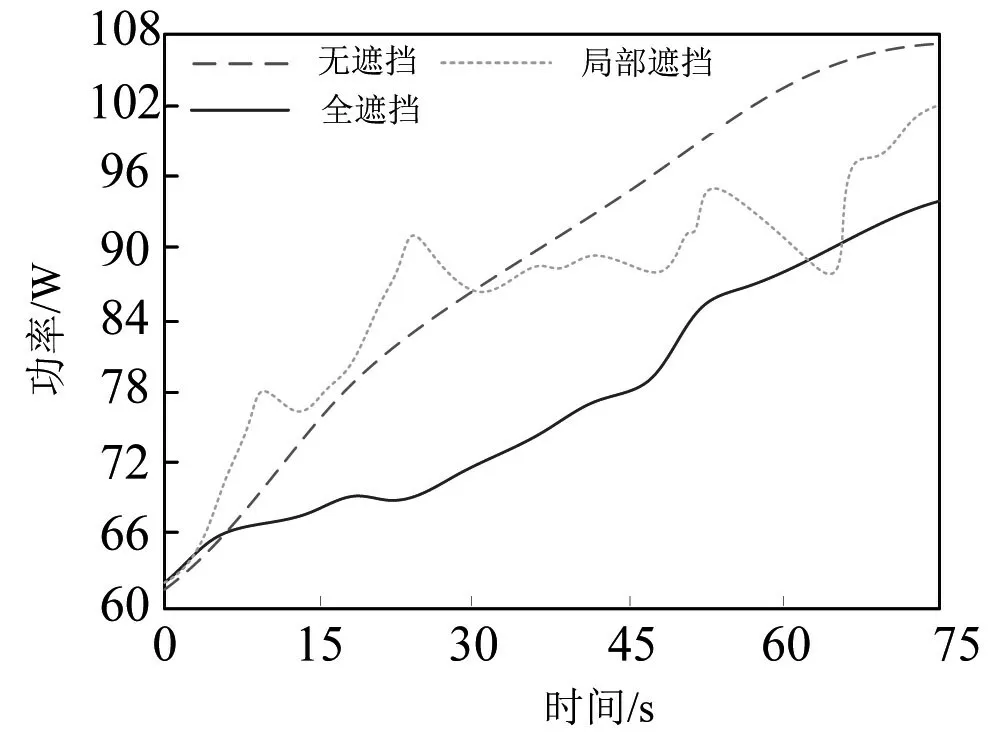
图3 跟踪信号样本图谱示意图
2.2 跟踪误差测试
基于设定跟踪信号在3种不同条件下的图谱样本,对3组跟踪方法进行偏差测试,每种方法各自执行对应跟踪方案,所得结果与样本图谱进行对比。为了便于观察分析,将图3 中的3 条曲线进行分窗统计,基于图3 跟踪信号样本图谱示意图可以确定在给定测试条件下太阳能电池板的最大功率点的理论值。然后根据实际输出功率与最大功率点理论值之间的差异,计算出跟踪误差,得到图4-图6所示结果。

图4 无遮挡条件下不同方法所得跟踪信号偏差
由图4 可知,3 组不同跟踪方法在太阳能电池板最大功率跟踪样本无遮挡的情况下,跟踪效果差异较大。其中,对比方法1的跟踪信号波动较大,且波动频率较高,观其信号与样本信号曲线的相似度,可以判定对比方法1跟踪效果不佳,信号丢失严重,同时存在信号控制过拟合的问题。观对比方法2曲线可知,整体波动比对比方法1要好,但是波动幅值明显增大,且与样本信号曲线重合区域偏少,说明该方法存在严重的信号丢失问题与收敛不足问题。相比上述两种对比方法,目标方法的跟踪曲线与样本跟踪信号曲线重合部分较多,曲线特征相似程度高,故此可以判定在无遮挡条件下,目标方法的太阳能电池板最大功率跟踪效果最佳。
根据图5 的测试结果可知,太阳能电池板最大功率跟踪样本局部遮挡情况下,3 组跟踪方法的性能差异可分为两个阶段。从开始到第37.5 s为第一阶段,该阶段中,对比方法1、对比方法2 与目标方法的跟踪效果处于同一水平,均存在偏差,其中对比方法1偏差最大,目标方法偏差最小。从第37.5 s开始至测试结束为第二阶段,该阶段3 组跟踪方法所得结果偏差较大,其中,对比方法1 偏差持续增大,对比方法2波动频率明显增加,目标方法跟踪精度明显提升,与样本曲线相似程度最高,综合两阶段特征可以判定在局部遮挡条件下,目标方法的太阳能电池板最大功率跟踪效果最佳。

图5 局部遮挡条件下不同方法所得跟踪信号偏差
根据图6 曲线分布可以看出,太阳能电池板最大功率跟踪样本全遮挡情况下,3 组跟踪方法的性能差异较小,从开始到第52.5 s,3 组跟踪方法所得曲线之间的偏差处于同一水平,虽然目标方法相比对比方法1 与对比方法2 的偏差要小,但是效果并不明显。从第52.5 s 开始至测试结束这一时间段内,3组跟踪方法所得结果出现较大差异,其中对比方法1 出现收敛过度的问题,对比方法2 波动幅值变化剧烈,仅有目标方法的跟踪效果保持稳定,且精准度明显增强。综合分析后可以判定在全遮挡条件下,目标方法的太阳能电池板最大功率跟踪效果最佳。

图6 全遮挡条件下不同方法所得跟踪信号偏差
综合上述三种情况下不同跟踪方法的表现,可以判定目标方法的太阳能电池板最大功率跟踪效果更符合设计预期要求。
2.3 跟踪控制约束性能
为了验证上述跟踪方法各自控制效果是否能够满足实际应用的约束要求。基于上述测试条件,由仿真测试工具随机生成1500组相似样本,并将无序排列样本数据随机分发至3 组参测方法,所得结果按照阈值100 进行均值处理,得到15 组关于100组参量的均值偏差,对比15组均值偏差之间的变化大小,变化越大,说明对应方法的控制约束能力越差,其稳定性越差;反之,说明对应方法的控制约束能力越强,其稳定性越好,测试结果如表2所示。

表2 均值偏差统计
由表2 数据可知,对比方法1 的均值偏差指标间的变化较大,且无规律性;对比方法2的指标差值相对稳定,相邻均值偏差指标值的差值较小,说明有着较好的约束控制能力。目标方法与上述两组对比方法相比,指标值变化更加稳定,数值大小更加合理,兼顾了约束的控制与平衡。综合上述分析,目标方法有着更好的控制效果,更能满足实际应用要求。
2.4 跟踪效率测试
为了进一步验证本文方法的跟踪效率,选取对比方法1 和对比方法2 作为对比方法,比较不同阴影覆盖程度下的跟踪效率,结果如图7 所示。随着阴影覆盖率的增加,3 种方法的跟踪效率均有不同程度的下降。其中,目标方法的跟踪效率保持在95%以上,效率较高,表明本文方法可以有效完成阴影条件下的电动汽车太阳能电池板最大功率跟踪。
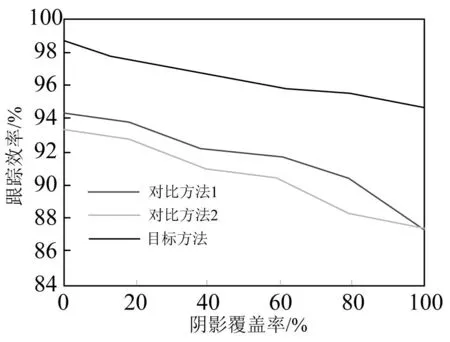
图7 不同方法的跟踪效率
3 结语
通过对不同阴影条件的电动汽车太阳能电池板参量的分析与优化,实现了对太阳能电池板最大功率信号的稳定跟踪,提升了跟踪信号的控制精准度,为多模态信号跟踪在太阳能电池板监测领域的研究提供了可参考数据。但是,由分析过程可以看出本文所提方法中阴影条件存在的可能性较多,因此影响因素中存在不可控因素,例如当阴影状态变化较快时,所计算参量均隶属于瞬态变量,此时所得到的跟踪结果必然是两种情况偏差之和,为了避免此问题的出现,需要在日后的研究中,尝试引入瞬态变量适应机制或算法,使跟踪信号变量能够满足瞬态变量权重,以此获得更加稳定、精准的跟踪效果,将跟踪方法调整至最佳状态。
猜你喜欢
军事文摘(2021年18期)2021-12-02
新能源科技(2021年8期)2021-04-02
汽车维修与保养(2021年8期)2021-02-16
文苑(2020年11期)2020-11-19
中国诗歌(2019年6期)2019-11-15
动漫星空(兴趣百科)(2019年3期)2019-03-07
知识就是力量(2017年12期)2018-01-15
中学生数理化·八年级物理人教版(2017年11期)2017-04-18
海外星云(2016年17期)2016-12-01
数学大王·中高年级(2016年4期)2016-05-14
