T 型光电转塔光具座结构研究
2024-01-05 07:21:14夏元杰刘宇陈静李磊张向阳
长春理工大学学报(自然科学版) 2023年6期
夏元杰,刘宇,陈静,李磊,张向阳
(西安应用光学研究所,西安 710065)
T 型光电转塔是由多种光电传感器和两轴稳定平台组成的光电设备,广泛应用在车载、舰载等多种武器平台,实现对目标的搜索、识别、定位和跟踪等功能[1-2]。随着精密传动技术、随动控制技术、光电技术、传感器技术和图像处理技术的发展和应用,光电转塔朝着高精度、高分辨率和智能化的方向发展[3-4]。T 型光电转塔的优点是便于更换、升级光电传感器,有利于侦察系统的能力提升,因而成为车载平台上的常用设备[5]。
一种典型的T 型光电转塔结构如图1 所示,该光电转塔由方位组件和俯仰组件组成,俯仰组件两侧安装左、右光具座组件和左、右传感器罩部件,其左、右光具座上分别安装有电视摄像机、红外热像仪、激光测距机和陀螺部件等光电传感器,前后各配置一个电子箱。 该光电转塔能够实现光电传感器绕方位和俯仰方向旋转,具有隔离载体扰动,保持光电传感器光轴在惯性空间稳定的功能[6-8]。

图1 T 型光电转塔结构
T型光电转塔左、右光具座上安装多个光电传感器,要求光具座结构体积小、重量轻、刚度高、承受载荷后弹性变形小,才能保证T 型光电转塔满足测角精度和多光轴平行性等性能指标要求,实现对地面目标和空中目标的高精度瞄准和跟踪,使武器系统达到精确打击的目的[9-10]。
1 T 型光电转塔光具座结构研究
1.1 光具座初始结构
1.1.1 光具座板状结构及存在问题
图1 所示的T 型光电转塔,其俯仰组件两侧的左、右光具座上分别安装光电传感器,左、右传感器罩分别固定在左、右光具座上,隔离外部水、汽、尘土和细菌,对传感器起密封保护作用。这种结构的优点是装拆、换装传感器方便,多光轴平行性检测、调校时也相对快捷。
该T 型光电转塔右侧的光具座组件如图2所示,该光具座为板状结构,其侧面安装有红外热像仪(6 kg)和陀螺部件(3 kg);传感器罩如图3 所示,为框状结构。其左侧光具座和传感器罩与右侧结构相似,这里不再赘述。

图2 板状结构光具座组件

图3 传感器罩
当利用大口径反射式平行光管装置对光电转塔进行多光轴平行性调校时,需要先拆下光电转塔左、右传感器罩,以左光具座上激光发射光轴为基准,分别调整电视摄像机小视场和红外热像仪小视场俯仰和方位位置,使其对激光发射光轴的平行度误差满足技术指标;然后再分别把左、右传感器罩装配到左、右光具座,并用螺钉紧固;最后利用大口径反射式平行光管进行多光轴平行性复检时,却发现测角误差和多光轴平行度误差均超差。
由于光具座和传感器罩的安装接触面平面度设计和制造的公差等级都是7,且表面粗糙度都达到1.6,也就是说,安装接触面的平面度和表面粗糙度对光轴平行度误差超差影响很小,因此多光轴平行性超差主要是由光具座的结构变形引起的。
1.1.2 板状结构光具座有限元静力分析
为了量化板状光具座在负载作用下的结构变形情况,需要对该光具座进行有限元线性静力仿真分析。这里以T型光电转塔右侧的光具座(该侧光具座上的红外热像仪负载较重、对光具座变形影响较大)为例进行仿真分析,该光具座材料为镁合金,材料属性如表1 所示。

表1 光具座材料属性
在有限元分析前处理阶段,对光具座实体模型进行简化,得到理想化模型。 红外热像仪(6 kg)和陀螺部件(3 kg)这两个载荷作为质量单元施加在光具座上:光具座通过8 个过孔用螺钉固定在光电转塔俯仰轴上,因此约束施加在8个过孔内圆柱面;用四面体单元对光具座理想化模型进行网格划分,结果如图4 所示。

图4 板状光具座网格图
对网格划分后的光具座施加约束和载荷,进行有限元线性静力求解,得到其单元应力分布如图5 所示,最大应力为4.680 MPa,远小于屈服强度。

图5 板状光具座单元应力云图
其节点位移云图如图6 所示,最大节点位移为0.016 2 mm
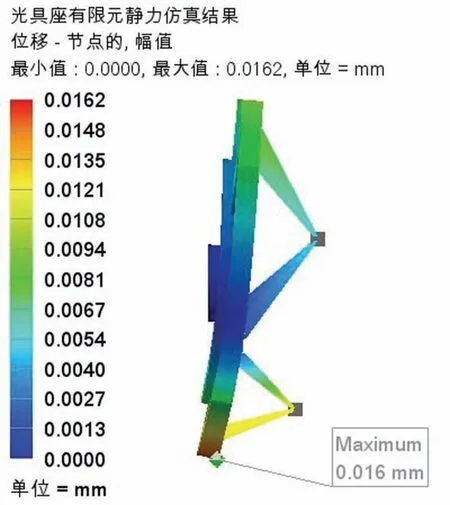
图6 板状光具座节点位移云图
1.2 光具座改进结构
1.2.1 光具座改进方案-框状结构
为了提高光具座刚性,减少光具座变形,一般是通过增加光具座厚度实现,但是增加光具座厚度,必然会增加光电转塔的总重量;同时俯仰轴的负载也随之增加,因此,该方案不可行。
在保持光电转塔总重量基本不变的前提下,改进光具座组件设计方案,如图7 所示,将光具座与传感器罩重新结构分解,使板状光具座四周像城墙一样围成一周,设计为框状结构(图8);传感器罩则简化为盖板(图9)。

图7 框状结构光具座组件

图8 框状光具座

图9 传感器盖板
1.2.2 框状光具座有限元静力分析
为了量化光具座结构改进效果,也需要对框状结构光具座进行有限元静力仿真。加固后的框状光具座同样承受红外热像仪(6 kg)和陀螺部件(3 kg)两个载荷,作为两个质量单元施加在光具座上;约束也同样施加在光具座8 个过孔内圆柱面;用四面体单元对框状光具座理想化模型进行网格划分,如图10 所示。

图10 框状光具座网格
进行有限元线性静力求解,得到其单元应力如图11 所示,此时光具座最大应力为0.694 MPa,远小于屈服强度。

图11 框状光具座单元应力云图
其节点位移云图如图12 所示,此时光具座最大节点位移不大于0.003 8 mm。

图12 框状光具座节点位移云图
1.3 两种结构光具座有限元分析结果比较
对板状结构和框状结构光具座的最大应力值(即单元冯氏应力)和最大变形值(即节点位移)进行对比,如表2 所示。

表2 不同结构光具座的应力和变形对比
可见,通过优化光具座部件结构,将原来只承担传感器密封保护、不承受负载的传感器罩,调整为平板;同时在板状光具座周围增加边框结构,即圆周加强筋,从而使光具座最大应力值降低了85.2%,最大变形量减少了76.5%,极大地提高了光具座刚度。
1.4 光具座结构变形对测角误差和多光轴平行度误差的影响
设红外热像仪的有效长度为l mm,对应光具座安装位置沿方位或者俯仰方向的最大有效变形量为d,则因光具座变形可能引起的红外热像仪方位或者俯仰方向的测角误差为:
可见,在不考虑其他因素影响的情况下,光具座结构变形越大,红外热像仪的测角误差越大,其对基准光轴的平行度误差也越大。
1.5 实验验证
把按照框状结构设计加工的光具座和对应的传感器盖板更换到T 型光电转塔上,装调完毕后,对T 型光电转塔进行测角误差和多光轴平行度误差复检,发现其误差均在指标要求范围内。
2 结论
光具座结构变形是影响T型光电转塔测角误差和多光轴平行度误差的重要因素之一,通过分别对承载光电传感器的初始光具座和改进光具座建立有限元模型,进行网格划分,施加约束和载荷,利用有限元分析软件进行求解,在后处理器中提取其单元应力和节点位移,通过对比最大单元应力值和最大节点位移值以及实验验证发现,在不增加光电转塔总重量的前提下,改进后的光具座结构更加合理,能够有效减少光具座变形,显著提高光具座刚度,充分保证T型光电转塔的测角精度和多光轴一致性。
猜你喜欢
耐火材料(2022年6期)2022-12-21 07:03:46
中国交通信息化(2022年12期)2022-02-11 12:05:14
激光与红外(2021年3期)2021-04-07 12:22:06
摄影之友(2020年12期)2020-12-23 09:39:39
造船技术(2020年2期)2020-05-18 06:53:28
红蜻蜓·低年级(2018年6期)2018-07-09 09:13:56
工业设计(2016年7期)2016-05-04 04:01:49
应用光学(2014年3期)2014-06-01 03:37:36
制造技术与机床(2014年11期)2014-04-23 12:44:16
应用光学(2014年6期)2014-03-27 02:03:30