细粒度遥感舰船开集识别
2024-01-04 02:24:42柳长源兰朝凤
光学精密工程 2023年24期
柳长源,李 婷,兰朝凤
(哈尔滨理工大学 测控技术与通信工程学院,黑龙江 哈尔滨 150080)
1 引言
舰船在现代化海域中扮演着重要的角色。军事方面,精准的舰船识别可以增强近海防御和远洋打击能力,民用方面,舰船识别技术可以帮助相关部门进行海上搜救和交通管制等活动[1]。所以对舰船目标精准、高效地识别是智能化海洋监控应用中非常重要的研究方向[2]。
由于不同类别的舰船之间形态较为相似而同类别的舰船之间形态差异较大,并且遥感舰船图像中的目标主体较小很难从周围环境中辨识出来,因此对舰船的精细识别具有较高的难度。目前,遥感舰船细粒度分类的关键在于局部微小的差异,而常规方法受到先验知识和弱特征表达的限制,难以处理复杂背景下的图像,且提取到的特征大多是全局特征,缺少对局部微小差异部分的重点关注[3]。因此,需要将细粒度目标的识别方法引入到舰船的细粒度分类中。
Lin 等人[4]提出了双线性卷积神经网络(Bilinear Convolutional Neural Network,BCNN),模型由两个子网络组成,一个子网络用于提取目标区域,另一个用于获取区域内的特征,以此来捕获不同子类间的微小差异,但是该模型忽略了不同卷积层之间的交互。Jianlong FU 等人[5]结合了区域定位和区域内特征学习提出了循环注意力卷积 神经网 络(Recurrent Attention Convolutional Neural Network,RA-CNN)。该网络由三个尺度构成,每个尺度均由注意力网络(Attention Proposal Sub-Network,APN)和分类子网络构成,其中注意力网络用于定位注意力区域,此模型的缺点是三个尺度参数不共享,模型计算较复杂。Chen 等人[6]提出了破坏与重构模型(Destruction and Construction Learning,DCL),使用区域混 乱机制(Region Confusion Mechanism,RCM)扰乱了由输入图像分割成的多个区域,迫使网络更多的关注判别性区域以此提高分类准确性。以上方法虽然对于细粒度遥感舰船的分类取得了较好的效果,但是受客观因素的限制,训练深度神经网络时几乎不可能收集到所有的舰船类别,而传统的细粒度遥感舰船分类方法都具有闭集性,即对于未知的类别,分类器会作出错误的分类,将其强行划分成某种已知的类别,最终降低识别的准确率。
为了使细粒度舰船分类更好适用于现实场景,本文设计了细粒度遥感舰船开集识别模型。通过带有几何空间注意模块的主干网络提取深度特征,利用基分支学习更紧凑的类中心分布,元嵌入分支重新定位类中心,将细粒度遥感舰船的分类问题推向开放环境,打破了传统的基于闭集假设下分类问题的局限。
2 相关方法
2.1 开集识别
传统的卷积神经网络(Convolutional Neural Net-works,CNN)由于使用Softmax 函数将输出类标签对应于训练类的最大规范化概率作为预测结果。因此,当出现训练数据集中没有的未知类别时,分类器会错误地将其归为与已知类别最相似一类。由于现实场景中的物体多种多样很难获取所有的类别用于训练,为此许多学者提出开放集识别(Open-set Recognition,OSR)的 概念[7],并提出了许多基于深度学习的OSR 方法,以缓解传统CNN 的闭集特性。开放集识别描述了一种场景,即在拒绝未知的类别的同时还能精准识别出已知类别,如图1 所示。OSR 方法原理是优化最小化训练数据集U和开放空间风险以及经验风险,其定义如公式(1)所示:

图1 开放集识别场景Fig.1 Open set identification scenario
其中,λr是一个正则化常数。
现有的OSR 方法有判别模型[8-9]和生成模型两种[10-11]。判别模型侧重于校准模型的潜在特征表示或模型的后验概率分布。而生成模型一般是通过变分自动编码器(Variational Autoencoder,VAE)或者生成式对抗网络(Generative Adversarial Networks,GAN)对数据施加先验概率分布。虽然以上两种模型将CNN 应用到一个未知的开放世界中,但是细粒度遥感舰船具有类内的多样性和类间的相似性,并且舰船通常与周围的环境相融合。将其应用于细粒度遥感舰船的识别更为复杂,识别的准确率也不高。
2.2 注意力机制
注意力机制是使计算机能够像人类一样自主获取重点关注区域,从而过滤掉无关的信息。现有的注意力有两种分别为硬注意[12]和软注意[13-16]。由于软注意力具有可微性使其在网络的正向传播和反向传播过程中能够实时进行更新,因此在CNN 中被广泛使用。
Hu 等人[13]提出了可自由嵌入到其他网络中的压缩 激活模 块(Squeeze and Excitation Network,SE-Net),该模块通过挤压、激励和尺度操作在通道维度上对特征进行处理,使得信息量较大的通道特征被更多的关注。借鉴Hu 等人的思想Wang 等人[14]提出了一种高效通道注意力模块(Efficient Channel Attention Module,ECA),该模块是不降维式的跨通道交互模块,仅仅利用了通道维 度上的特征。Woo S[15]等人整合了通道注意力和空间注意力提出了轻量级的注意力模块(Convolutional Block Attention Module,CBAM),虽然以上注意力模块在分类任务中表现良好,但是不能将所关注的重点区裁剪出来使输入图片变成理想的图片。为了在过滤背景信息的同时更突出目标主体,Jader-berg 等人[16]提出了一种空间变换网络(Spatial Transformer Networks,STN),在空间域内进行空间变换来提取关键信息。经过训练的STN 可以找到感兴趣区 域(Region Of Interest,ROI)的区域,并具有旋转、缩放和变换的功能。因此,本文将STN 引入到特征提取网络前,用于去除舰船背景信息的干扰,将舰船目标主体裁剪出来并放大到标准尺寸。
3 算法设计
本文的分支融合网络模型由基分支和元嵌入分支构成。首先采用STN 提取细粒度遥感舰船图像中的舰船目标,之后使用特征提取网络提取舰船目标图像的深度特征分别作为基分支和元嵌入分支的输入,基分支用于减小舰船图像的类内差异,元嵌入分支用于增大舰船图像的类间差异并加强对小样本的学习能力,同时也对基分支的分类结果进行校准。最后对两个分支的分类结果决策融合,根据设定的阈值判别已知类和未知类,若为已知类则进一步细分出具体类别。模型的总体框图如图2 所示。
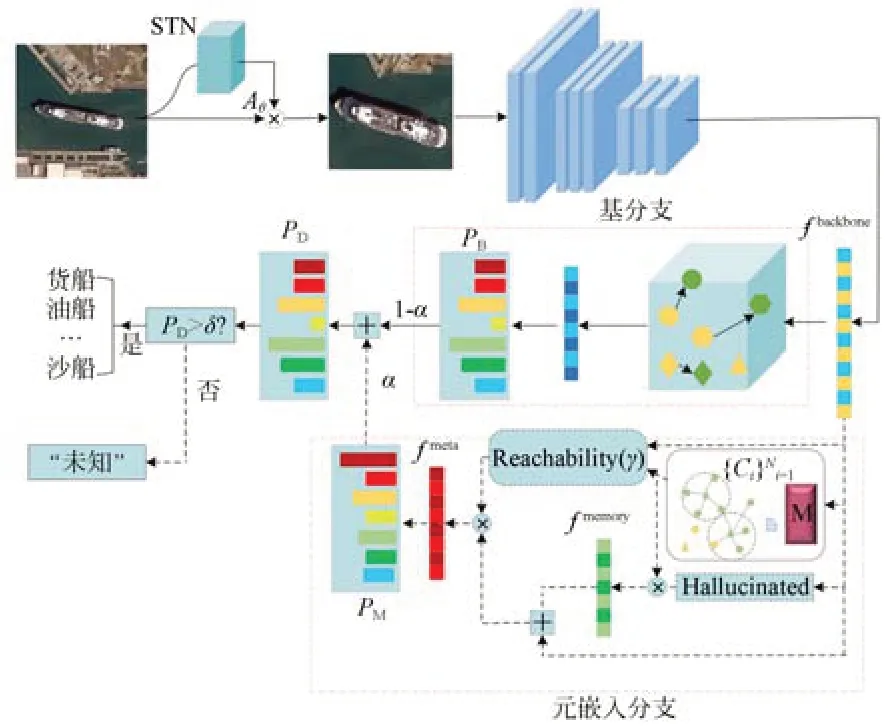
图2 模型整体结构框图Fig.2 Model overall structure block diagram
3.1 多尺度STN-Resnet 网络
STN 主要由三部分构成分别是:参数预测(localisation net)、坐标映射(grid generator)和像素采集(sampler),基本架构如图3 所示。
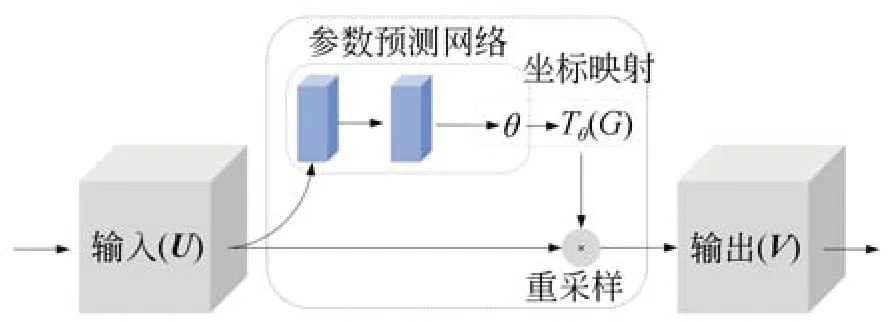
图3 STN 基本架构Fig.3 Basic architecture of STN
参数预测模块的输入U,输出变换矩阵,决定STN 模块对输入图像或特征图做哪种变换;坐标映射用于做矩阵运算,该运算以目标图像V中的所有坐标点为自变量,θ为参数计算输入图像U的坐标点,具体计算过程如式(2)所示:
STN 可以任意位置、任意数量的插入到现有的卷积神经网络中,使得网络能够自主的对整张图像或特征图进行平移、缩放、剪裁和旋转等空间变换。由于该模块在选择图像中重点关注区域的同时,还可以将该区域放大到标准尺寸。故本文将其插入到特征提取网络Resnet34[17]前,用于提取舰船目标主体。
由于卷积核大小不同获得的输入图像中的感知域也不同,而细粒度舰船的分类关键在于细小差异。仅使用一种尺度的卷积核,提取到的信息比较单一,在一定程度上限制了细粒度遥感舰船的分类准确性。因此,本文使用1×1,3×3 和5×5 不同大小的卷积核构建了两个并行的卷积通道来提取不同尺度的信息,其中第一条通道由1×1,3×3 卷积和BN 层构成;第二条通道由1×1,5×5 卷积和BN 层构成,最后将两个通道的输出进行拼接经过一个1×1 卷积降维输入到Resnet34 网络。并行卷积模块结构示意图如图4所示。
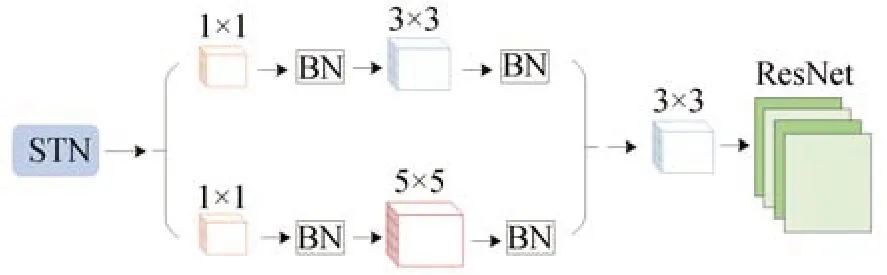
图4 并行卷积模块结构示意图Fig.4 Structure diagram of parallel convolution module
3.2 基分支结构
对于细粒度分类而言仅利用特征提取网络得到不同类别之间的潜在特征,区分性不是很好,而利用STN 先去除背景信息的干扰,由特征提取网络得到的深度特征辨别能力依旧不强,以此进行分类也很难达到令人满意的效果。Wen等人在2016 年提出中心损失函数(Center Loss)[18]。Center Loss 最初应用在人脸这种复杂的数据分布,使得同种类别间的特征更加紧凑,公式如式(3)所示:
其中:xi是由特征提取网络提取到的第i个特征,cyi∈Rd是类别yi的特征中心,d是特征维数,m为批量处理的大小。
特征中心cyi随深度特征的变化而变化,越靠近最近类中心的特征,越属于相应的类。为了提高网络的训练效率,训练时基于小批量m更新中心,并在每次迭代的过程中,通过平均相应类的特征来计算中心,目的是避免更新所有类中心导致网络训练时间的增加。
LC梯度和类中心的更新方程[18]如式(4)和式(5)所示:
其中:yi=j为判断δ状态的条件,当条件成立,δ=1;如果不成立,δ=0。当yi和cj的类别j不同时,不需要更新,只有类别相同时才更新。如果单独使用Center Loss 来监督网络的学习,会使得深度学习的特征和类中心退化为零,导致损失非常小。又由于该损失函数和Softmax Loss 一样不需要对样本进行复杂的重组,两者的要求几乎相同。因此,本文将Center Loss 加到基分支中,和Softmax Loss 联合监督,加强对辨别特征的学习,提高识别的准确率。故基分支中的总损失函数LBase为LSoftMax和LC的加和,如式(6)和式(7)所示:
其中:Wj∈Rd表示最后一个全连接层中权重W∈Rd×n的 第j列,d是特征维度,n是类别 数,b∈Rn是偏置项,标量λC在[0,1]中受限,主要用于平衡两个损失函数。λC的值影响了不同特征之间的可分性,λC值越大,会导致同类之间的特征更紧凑,反之,同类间的特征更分散。
该分支的输入为Resnet 网络最后一个卷积层的输出特征fbackbone,采用双损失共同监督,其中,Center Loss 用于减小同类间的差异,Softmax Loss 用于学习类间的差异,两者的联合加强了对深度特征的辨别能力的学习,使网络更适用于类间差异小的目标。
3.3 元嵌入分支
细粒度舰船具有较大的类内差异的同时具有较小的类间差异。虽然基分支有效解决了同类别舰船图像之间差异较大的问题,但是由于不同类别舰船之间的差异很小,单独使用基分支对有细微差异的舰船分类准确率较低。为了减小舰船图像类内变化的同时增加其类间的差异,使特征在不受相应类中心影响的同时还增大了与其他类中心之间的距离。本文的元嵌入分支借鉴类结构分析方法[19],采用判别中心作为基本构造块。将训练的主干特征fbackbone作为元嵌入分支的输入,让M=表示所有训练数据的视觉记忆,N为训练类别数目。在训练过程中,随机抽取一定的样本数据用于更新中心ci,最大限度地提高训练样本和其他类中心之间的距离。
由于细粒度舰船图像采集困难,所以数据分布大多数是不均衡的。对于开放环境下的数据量较少的类别缺少监督更新的能力。借鉴文献[20]的思想,在元嵌入分支中使用记忆特征fmemory丰富主干特征。使用幻觉(hallucinated)系数O∈RN评估每个类别的中心和fbackbone之间的权重关系如式(8)所示:
幻觉系数通过一个轻量级的全连接网络从主干特征中获得的,并通过γ对特征fmemory进行缩放,得到元特征fmeta。如式(9)所示:
其中,γ 为主干特征fbackbone与其最近的类中心之间的距离如式(10)所示:
当γ较大时认为输入的样本是未知的即远离每个类的中心,并且它的元特征在所有维度上均被缩到近似于零,这进一步体现了开放集类样本的特征表示与已知训练类样本的特征有显著差异。相反,γ较小认为输入的是一个已知类的样本,此时每个维度的差异都保持不变。元嵌入分支作为训练的第二阶段,总损失函数Lmeta为交叉熵损失函数LCE与最大边际损失函数LM的加和,如式(11)所示:
其中,λm为最大边际损失的权重。
此分支使用由余弦相似度设计的分类器[21]替换传统的Softmax 分类器,这使得该模型能够统一对已知类和未知类进行识别,其中分类结果PM由余弦相似度算子计算,如公式(12)所示:
3.4 分支融合
在大多数情况下,先融合多个特征,再送入分类器进行分类。这种特征融合的方法在闭集假设下的分类任务中取得了较好的效果,但是对于开集的识别任务效果并不理想。开集的识别常常会出现未知的类别。按照人类对未知物体的感知角度,融合它最终的分类结果,而不是它应该属于的类别即特性。因此,本文通过端对端融合两个分支的最终识别结果来确定舰船的所属类别。最终两个分支融合的分类结果PD如式子(13)所示,即将基分支的分类结果PB和元嵌入分支的分类结果PM进行决策融合。
其中,α表示校准度。
为了更好地拒绝未知类别,在融合分类结果PD后设定一个阈值,用于判别是否为已知类别,最终分类结果y如式(14)所示:
其中,δ是区分已知类和未知样本的鉴别概率阈值。
4 测量实验与结果
4.1 数据集预处理
FGSCR-42 数据集[22]是一个 广泛的 光学遥感图像中细粒度舰船分类的公共数据集,包含类别较多的军用舰船和民用舰船的图像。为了验证本文方法的有效性,选取了FGSCR-42 数据集的一部分进行评估。考虑到民用船易于采集、军用舰船采集困难,选取7 种民用船为已知类别作为训练样本,将多种军用舰船的混合作为未知类别和7 种已知类的民用船一起作为测试类别。每类样本示例如图5 所示。

图5 样本示例Fig.5 Sample example
OSR 方法中的测试集类要比训练集类多,故在本研究中将多种军用舰船的混合统一当作未知类别,和7 种已知类别一起作为测试类。为了更适用于现实场景,在实验中将数据集设置为平衡和不平衡分布两种,平衡分布的训练数据集中每个类别有400 个,共2 800 个样本如表1 所示,不平衡的训练数据集如表2 所示。

表1 平衡分布数据集Tab.1 Dataset of balanced distribution

表2 不平衡分布数据集Tab.2 Datasets of the unbalanced distribution
由于遥感图像的目标识别需要不同视角的识别能力,因此每类选取60 多个方向的测试样本,按照开放度公式[23]如式(15),设置了4 种不同的开放度分别为9.25%,14.16%,18.35% 和21.98%,每种开放度下的对应的未知类别中分别包含3,5,7 和9 种军用舰船。
其中:CTR为训练类别的标签数量,CTE为测试类别的标签数量。
测试集的设置见表3 所示,以此评估本文方法的有效性。
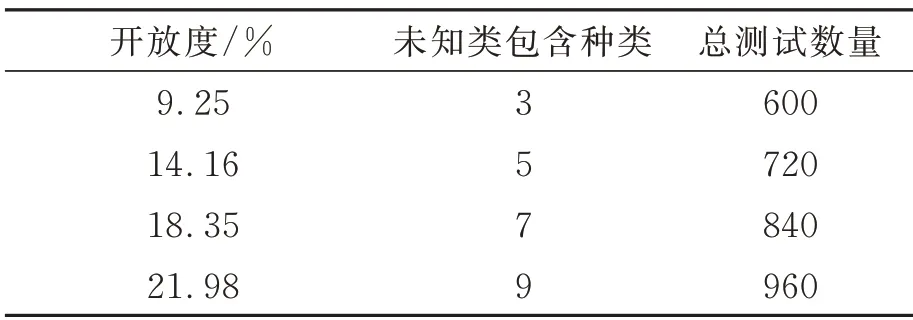
表3 测试数据集Tab.3 Test dataset
对处理后的数据集采取常用的图像处理方法,首先对细粒度遥感舰船图像进行水平翻转和垂直翻转并旋转90°,180°和270°来增加数据的多样性。之后对光学RGB 图像中的每个像素用平均值μx和标准差σx进行标准化,如式(16)所示,得到泛化效果:
其中,x和分别表示原始图像和标准化图像的像素值。
4.2 实验环境及参数设置
实验硬件环境采用IntelCore i9-13900K 处理器,RTX4080 魔鹰显卡,显存为16 G。软件环境为 Ubuntu22.04.2 和 CUDA11.7,使 用 pytorch1.8 深度学习框架。初始学习率设置为0.001,每50 轮收缩1/10,一阶段训练100 轮,二阶段训练200 轮,在这个阶段中冻结主干网络的参数,即优化器只更新与元记忆分支相关的参数。以上两个阶段中batch-size 均设置为24。λC和λm控制了来自相应类中心的吸引力,分别设置为0.01 和0.1。α决定元嵌入分支对基分支分类结果的校准程度,将α从0 变化到0.5,同样在两种数据集上进行实验如图6 所示。
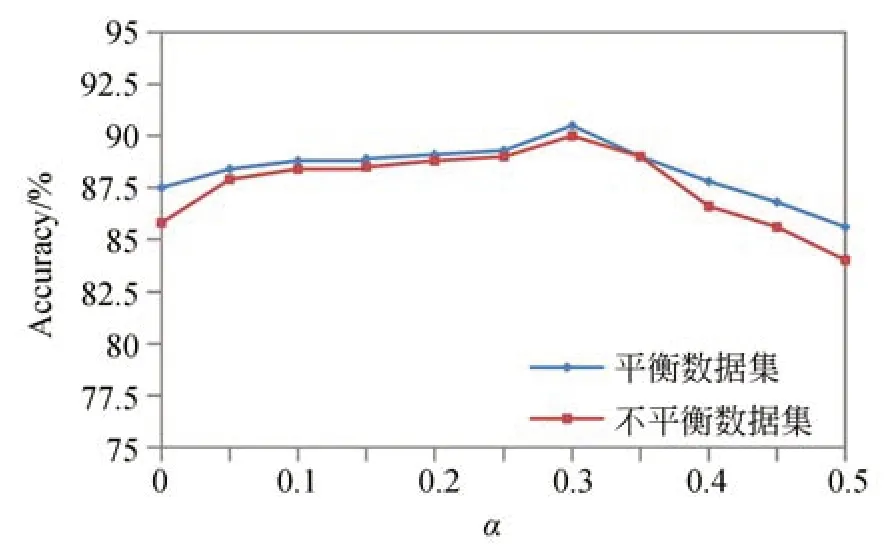
图6 不同α 下的识别准确率曲线图Fig.6 Graph of recognition accuracy under different α
通过观察发现随着α值的变化而最终的识别精度并不那么稳定,α值越高,识别的精度越低,而α值越低,不会显著提高精度,综合考虑将其设置为0.3。
鉴别概率阈值δ表示已知类和未知类之间的界限,在一定程度上影响网络的识别准确率。而本文中已知类占比较多,因此同样在低开放度下将从0.5 到0.9 在平衡分布和不平衡分布的两种数据集上进行实验,将识别的准确率用折线图表示如图7 所示。
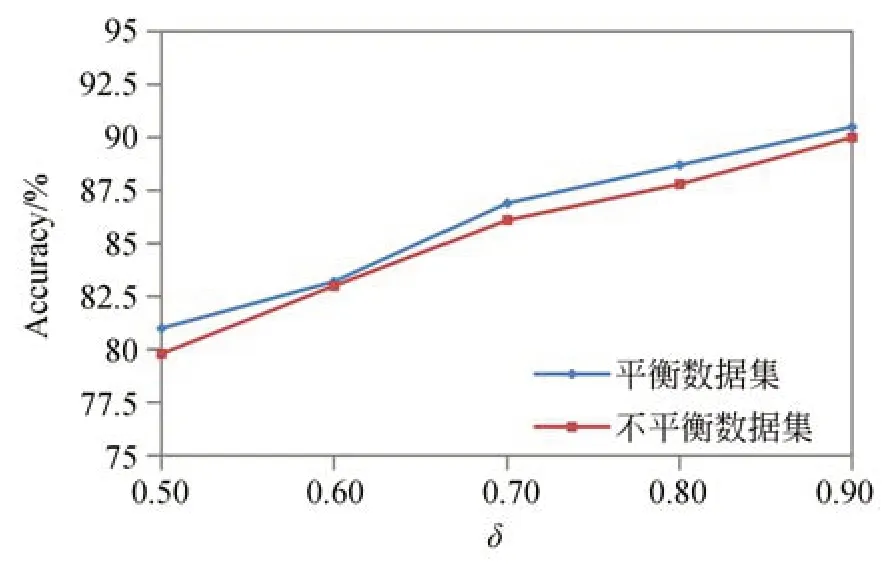
图7 不同δ 下的识准确率曲线图Fig.7 Different δ recognition accuracy curves
通过观察发现δ为0.9 时在两种数据集下的识别准确率均较好,故本研究δ选取为0.9。
4.3 消融实验
为了验证STN 模块和中心损失函数LC对该模型整体性能的贡献,本文在不平衡数据集上用准确率作为评价指标来评估该模型性能。因为现实场景中所能采集的不同类别图像数量很难达到均衡,所以采用不平衡数据集进行验证,更加符合实际的情况,实验的结果如图8 所示。
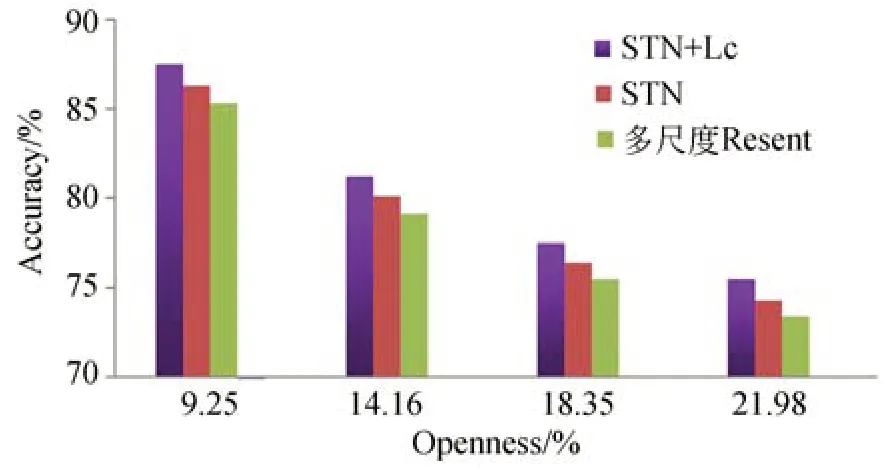
图8 不同开放度下STN 实验对比图Fig.8 Comparison of STN experiments under different openness
从图8 中可以看出,加入STN 模块后SResNet34 网络的识别准确率整体高于多尺度Resnet 网络的识别准确率,可见背景信息的干扰较大的影响了舰船识别。在加入STN 模块的基础上使用LC中心损失函数聚合类内特征,使得网络的识别准确率得到了进一步提升,由此可知,LC也能够提升该模型整体性。
为了更直观地看出STN 模块对网络性能的影响,将输入ResNet34 网络和SResNet34 网络的原始图像和注意力图进行对比,如图9 所示(彩图见期刊电子版)。注意力图中红色部分表示网络更多关注的区域,由图可知加入STN 模块后的SResNet34 网络受背景信息干扰明显减小,更多关注目标主区域。
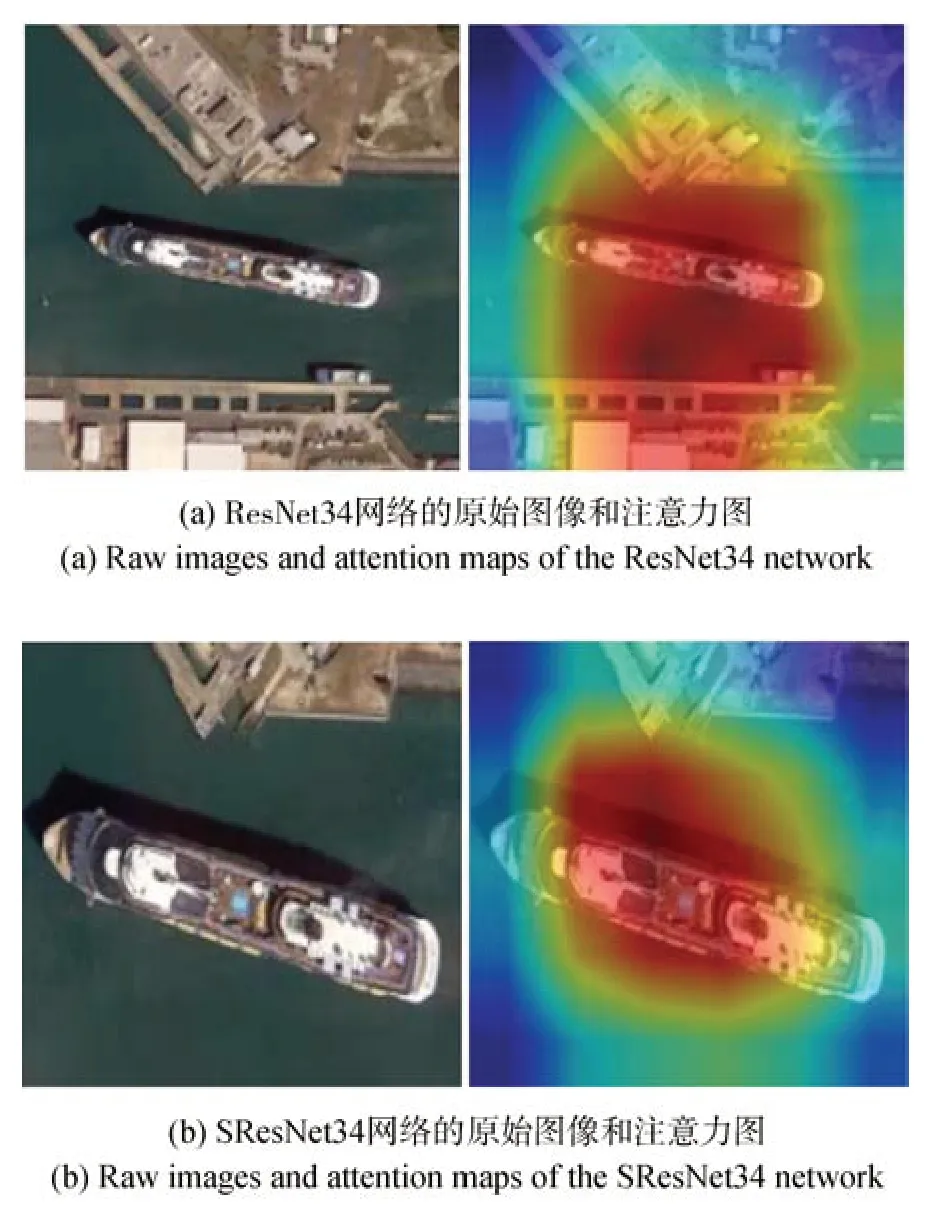
图9 ResNet34 网络和SResNet34 网络的原始图像注意力图Fig.9 ResNet34 network and SResNet34 network original image attention diagram
元嵌入分支中的元特征主要由reachability和幻觉(hallucinated)系数两个模块构成。为了验证这两个模块对该模型整体性能的贡献。同样在不平衡分布的数据集上进行验证,实验结果如图10 所示。
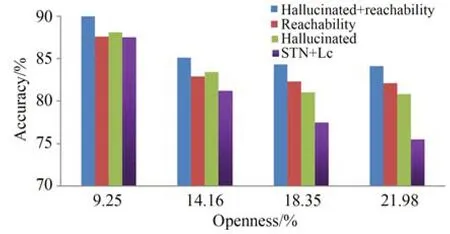
图10 不同开放度下hallucinated和reachability实验对比图Fig.10 Experimental comparison of hallucinated inated and reachability under different degrees of openness
通过观察,可以发现当未知类数量较少时,仅包含幻觉(hallucinated)系数的模型比仅包含reachability 模块的模型具有较好的识别结果。然而,随着未知类的增加,它的性能不如包含reachability 模块的网络模型好,因为当未知类别较少时,该模型的精度主要取决于已知类别的分类准确率。由图10 可知,单独使用这两者并没有显著提高网络模型的性能,但将这两者的结合对模型的性能有很大提升。
4.4 对比实验及结果分析
为了更好地验证本文方法的泛化性能,首先在21.98%的开放度下将本文模型分别应用在处理后的细粒度遥感舰船FGSC-23 数据集和FGSCR-42 数据集上,并对其结果进行比较,如表4所示。可以看到本文方法在FGSC-23 和FGSCR-42 数据集上的识别准确率均高于其他几个对比模型。
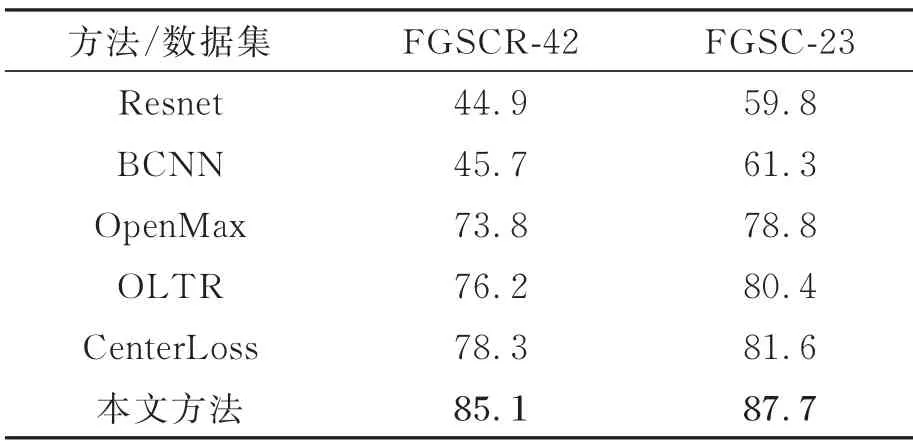
表4 不同数据集上准确率的比较Tab.4 Comparison on accracy of different data sets(%)
为了全面评价本文提出的细粒度图像分类与开集融合方法的有效性,单独将本文模型应用到处理后的细粒度遥感舰船图像FGSCR-42 数据集上,评价指标为准确率、F1-score 和混淆矩阵。表5 表示在平衡数据集下不同模型的性能比较。观察结果发现,Resnet 和BCNN 的总体精度接近于测试样本中已知类样本的比例,这充分证明了传统的基于卷积神经网络的细粒度遥感舰船分类方法具有闭集性,即全部开放的未知类样本均被归为已知类样本;Openmax,Center Loss和OLTR 方法改善了传统的基于卷积神经网络的图像分类的闭集性,使其更适应于开放环境。然而,随着开放类的增加,准确率和F1-score 的性能都有显著下降。由表5 可知,本文的方法整体性能最好,在9.25% 开放度下相比于Center Loss 模型准确率提升1.5%,F1-score 提升0.8%;21.98%开放度下准确率提升6.8%,F1-score 提升3.6%。本文模型随着未知类的增加平均准确率和F1-score 值降低的较少。
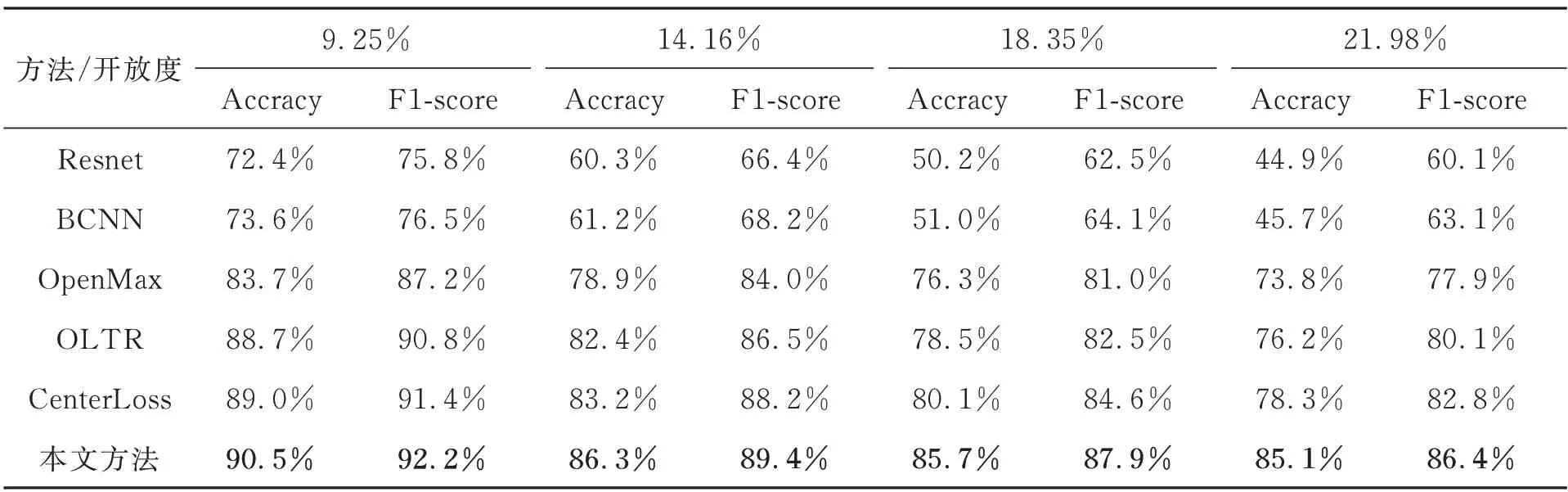
表5 平衡数据集上各方法的比较Tab.5 Comparison of methods on the balanced datasets
在不平衡数据集上训练的不同模型的性能比较见表6 所示。由于训练数据分布不平衡,各模型的准确性在一定程度上有所下降,因为此时除了区分已知类样本和未知类样本外,尾部类和未知类的有效区分也增加了识别的难度。从表中可以观察到,基于闭集假设下的Resnet 和BCNN 模型对细粒度遥感舰船分类精度较低,有些尾部类被识别为未知样本。OpenMax,Center Loss 和OLTR 等方法随着开放程度的增加识别的准确率和F1-score 值均比对应开放程度下基于闭集假设的识别准确率高,但与平衡数据集下的识别准确率相比降低的较多,由此可知以上3种方法易受数据分布的影响。
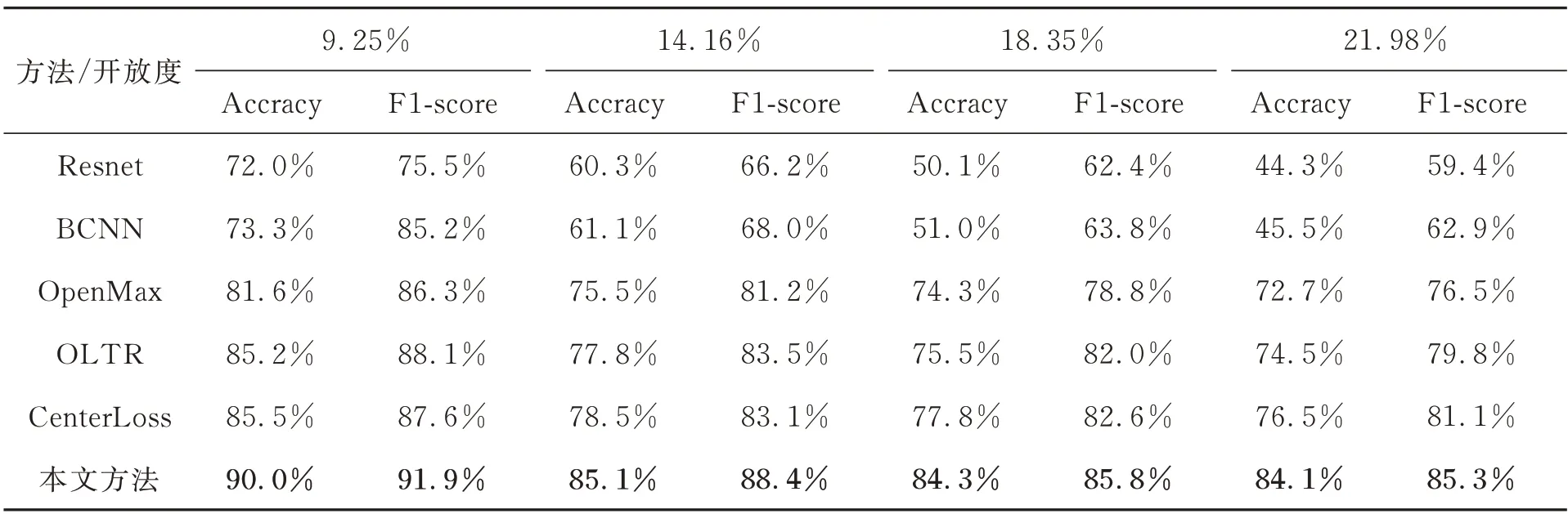
表6 不平衡数据集上各方法的比较Tab.6 Comparison of methods on the unbalanced datasets
图11 表示开放度为9.25%时的混淆矩阵,其中(a)表示在平衡分布的数据集下标准化的混淆矩阵,(b)表示在不平衡数据集下标准化的混淆矩阵。每个类别的召回率由混淆矩阵的对角线表示,且每一行的概率加和为1。
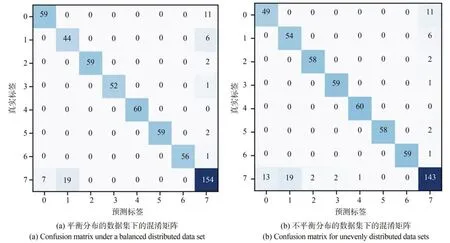
图11 开放度9.25%时的混淆矩阵Fig.11 Confusion matrix at 9.25% openness
由混淆矩阵可直观地看出开放度相同的情况下模型在平衡与不平衡分布的数据集上识别准确率相差较小。进一步证明了本文的方法受数据分布影响较小。
综上所述,本文的方法无论在平衡分布的数据集下还是不平衡分布的数据集下均优于先进的判别OSR 方法和细粒度图像分类方法,并且在未知类的数量增加和数据不均衡时具有较强的泛化能力。
5 结论
本文将开集识别方法融入到细粒度图像分类中,有效解决了传统细粒度遥感舰船分类的局限性。通过STN 模块提取舰船目标主体,利用损失函数减小类内差异的同时增加类间差异,最后将基分支和元嵌入分支的分类结果进行决策融合。在开放程度不同时对平衡分布和不平衡分布的数据集进行了充分实验,结果表明,本文方法在开放度为9.25%时平衡分布和不平衡分布的数据集上识别准确率偏差最小是0.5%,开放度为18.35%时识别准确率偏差最大是1.4%,与基于判别模型OSR 中表现较好的CenterLoss 模型相比,在平衡数据集的4 种开度下准确率分别提升1.5%,3.1%,5.6%,6.8%,F1-score 提升0.8%,1.2%,3.3%,3.6%,不平衡的数据集下准确率分别提升4.5%,6.6%,6.5%,7.6%,F1-scoree 提升4.3%,5.3%,3.2%,4.2%。综上,本文方法具有较高的准确率和较好的泛化能力。在未来的工作中,可考虑雨雪和浓雾天气,引入更加复杂背景,再结合本文模型设计一个整体的识别系统,使得其更符合实际情况。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
红外技术(2022年11期)2022-11-25 03:20:40
高技术通讯(2021年1期)2021-03-29 02:29:24
舰船科学技术(2021年12期)2021-03-29 01:28:44
学生天地(2019年28期)2019-08-25 08:50:54
数学物理学报(2018年1期)2018-03-26 08:16:36
电脑与电信(2018年11期)2018-02-16 05:41:32
信息安全研究(2016年3期)2016-12-01 06:06:41
舰船科学技术(2016年1期)2016-02-27 15:39:26
山西大同大学学报(自然科学版)(2014年3期)2014-01-23 01:56:30