
船舶燃气轮机转速自适应模糊控制
2024-01-03 16:03:04马树焕
舰船科学技术 2023年22期
马树焕
(山西工程技术学院,山西 阳泉 045008)
0 引 言
船舶燃气轮机具有功率密度大、机动性优越等优势,燃气轮机控制效果,直接影响燃气轮机的运行安全性、经济性以及稳定性。控制功能主要包括转速控制、排气温度控制、限制保护控制等。转速控制属于船舶燃气轮机控制的核心问题,在燃气轮机启停时期、加减载阶段,转速的合理控制,可保证燃气轮机运行状态平稳[1-2]。
为此,船舶燃气轮机转速的控制研究成为当下船舶智能控制问题的研究热点。宋武健等[3]在分析船舶电力推进系统负载特性的基础上,使用转速环控制器,调节转速环带宽,实现船舶电力推进系统转速控制。虽然此方法可控制电机的转速响应无超调,但在多变工况中,此方法的自适应控制效果不好。宋恩哲等[4]在研究船舶混合动力系统控制问题时,以动态协调的方式,控制天然气发动机转速,但此方法在提出使用“功率/扭矩闭环”的方式,调节转速的过程中,对此方面的具体操作方法一语带过,研究层次有待提升。
本文提出基于状态观测的船舶燃气轮机转速自适应模糊控制方法,此方法有效结合已有经验,在准确观测船舶燃气轮机转速状态的前提下,利用模糊自适应PID 控制器,完成船舶燃气轮机转速自适应模糊控制。
1 船舶燃气轮机转速自适应模糊控制
1.1 状态观测器
船舶燃气轮机转速控制时,可将船舶燃气轮机构建为非线性控制模型:
式中: φh、yh分别为h时刻船舶燃气轮机燃油量、目前实际转速状态值;ch为船舶燃气轮机不确定项,比如潜在噪声等成分信息。f为非线性函数;xh为转速状态观测结果。
船舶燃气轮机运行时,运行工况出现变动后,船舶燃气轮机运行参数也随之变化。此时燃油流量这一指标,可体现船舶燃气轮机的运行状态,燃油流量和燃气轮机转速之间具有明显的映射关系[5-7],则
将式(2)代入式(1),则
使用式(3)构建船舶燃气轮机转速状态观测器时,因燃气轮机的不确定项存在约束值,为此设置转速观测器的观测结果为:
由式(4)可知,当掌握船舶燃气轮机的初始状态值、历史的燃油流量,便可实时估计观测后续时刻的转速状态量。在此过程中,需设定转速跟踪矢量误差,如转速出现异常,则xh与给定转速之间存在偏差,假如转速估计相对偏差为:
则结合dh与转速异常阈值 β0之间关系,便可完成转速状态观测,判断标准是:如果|dh|<β0,那么h时刻转速正常;如果|dh|≥β0,那么h时刻转速异常。
1.2 基于模糊自适应PID 控制器的转速控制
针对观测的异常转速问题,使用基于模糊自适应PID 控制器的转速控制模型,解决船舶燃气轮机转速自适应模糊控制问题。
模糊控制能通过计算机模拟人类思维方式、操作经验,应用于问题分析过程之中。其利用控制规则便可解决非线性控制问题。控制过程中,把模糊控制与PID 控制结合,实现自适应控制。图1 为基于模糊自适应PID 控制器的转速控制模型结构图。
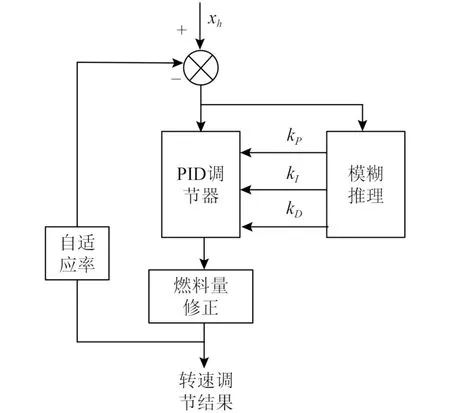
图1 基于模糊自适应PID 控制器的转速控制模型结构Fig. 1 Structure of speed control model based on fuzzy adaptive PID controller
如图1 所示,此模型根据实时观测的速度状态量,设置转速偏差与偏差变化率分别是d、,则结合模糊推理规则,实时修正PID 控制器比例kP、积分kI、微分kD这3 个控制参数,便可调节燃气轮机燃油流量,从而保证转速控制效果。
船舶燃气轮机转速的模糊自适应PID 参数调节运算方法为:
式中:kP0、kI0、kD0依次为kP、kI、kD的初始值;ΔkP、ΔkI、ΔkD依次为kP、kI、kD的调节幅度。
构建转速控制的模糊规则表时,由模糊隶属度函数,把转速给定值输入量映射至模糊集区间中,为保证转速控制的自适应性、灵敏性,使用归一量化因子,把模糊控制器输入量映射至模糊集论域[正大、正中、正小、零、负小、负中、负大]中,模糊隶属函数示意图如图2 所示。
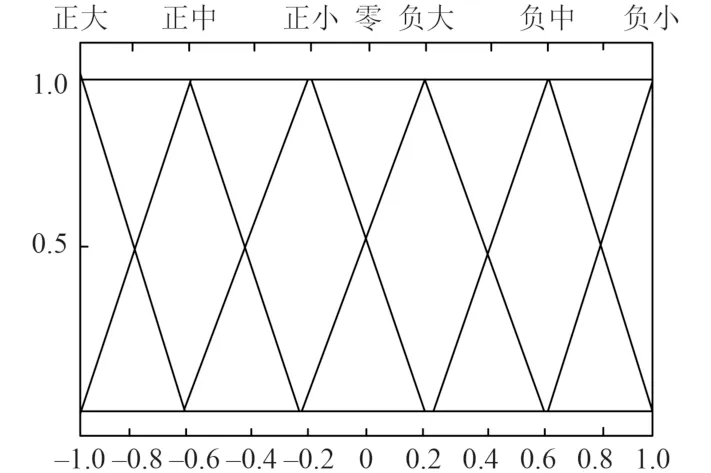
图2 模糊隶属函数示意图Fig. 2 Schematic diagram of fuzzy membership function
模糊逻辑推理使用Mamdani 模型,引入加权平均解模糊法,求解转速控制器的输出值,则转速控制律q为:
式中,W、 ε分别为模糊控制器的转速控制输出值、隶属度。
为实现转速自适应控制,使用Lyapunov 函数设置自适应率,则
式中:Z、都为正定矩阵;q为转速控制律,为正常数。
2 实验分析
2.1 实验设定
船舶燃气轮机运行时,转速控制效果需符合预期给定状态,为了保证船舶燃气轮机安全运行,且具备较好的发电能力,需要动态、自适应调节转速。为测试本文方法的使用效果,以某型燃气轮机为实验对象,此燃气轮机信息如表1 所示。
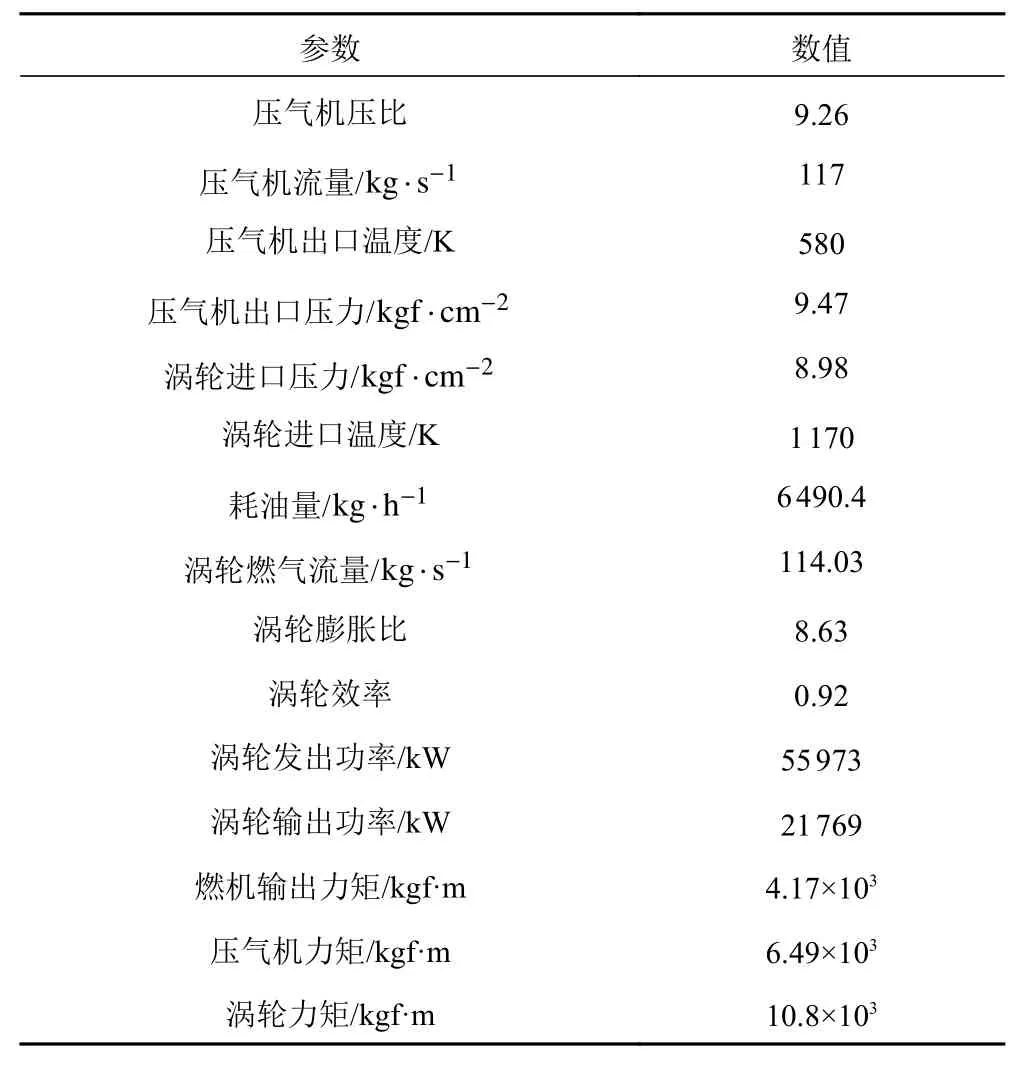
表1 实验研究对象详情Tab. 1 Details of experimental research subjects
实验中,燃气轮机的给定连续阶跃燃油与负载情况如图3 和图4 所示。
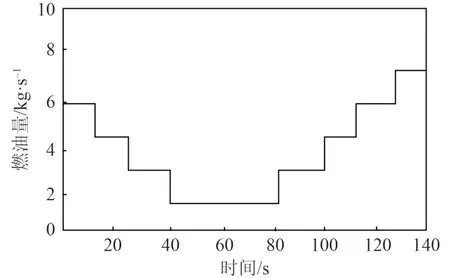
图3 燃气轮机的给定连续阶跃燃油输入详情Fig. 3 Details of given continuous step fuel input for gas turbines
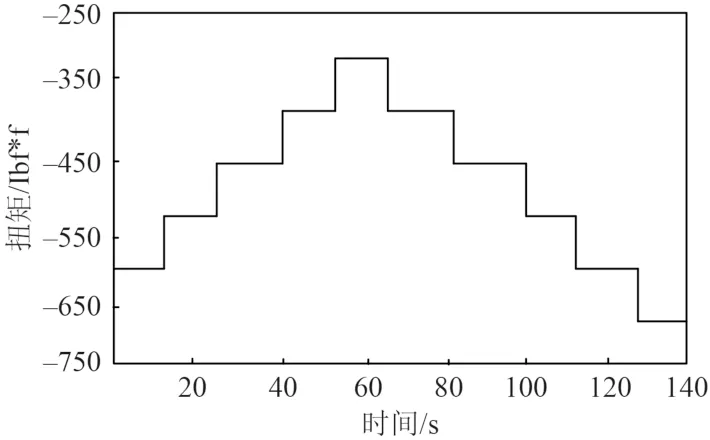
图4 燃气轮机的给定连续阶跃外部负荷输入详情Fig. 4 Details of the given continuous step external load input for a gas turbine
2.2 本文方法控制性能测试
在图3、图4 所示工况中,本文方法使用后,船舶燃气轮机低压转速、高压转速的控制效果如图5 和图6 所示。
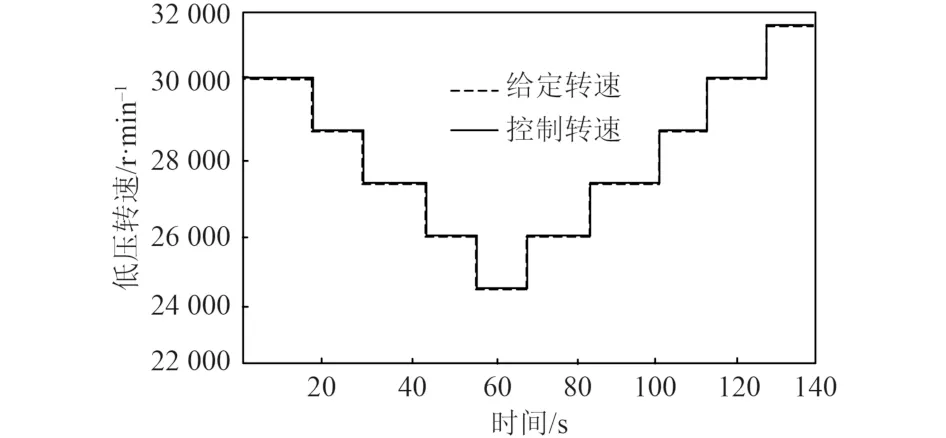
图5 船舶燃气轮机低压转速控制效果Fig. 5 Low pressure speed control effect of ship gas turbine
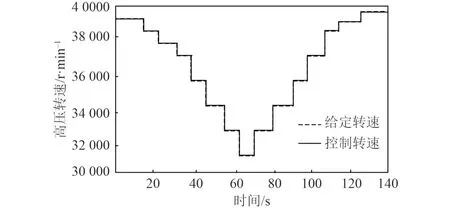
图6 船舶燃气轮机高压转速控制效果Fig. 6 High pressure speed control effect of ship gas turbine
可以看出,本文方法使用下,船舶燃气轮机低压转速、高压转速的控制均与给定值匹配,转速的变化趋势不存在明显超调状态。
为更直观分析本文方法的使用价值,使用雷达图分析本文方法使用后,船舶燃气轮机转速偏差率、转速稳定时间参数,雷达图中,面积较小,则表示转速控制稳定性越高。测试结果如图7 和图8 所示。
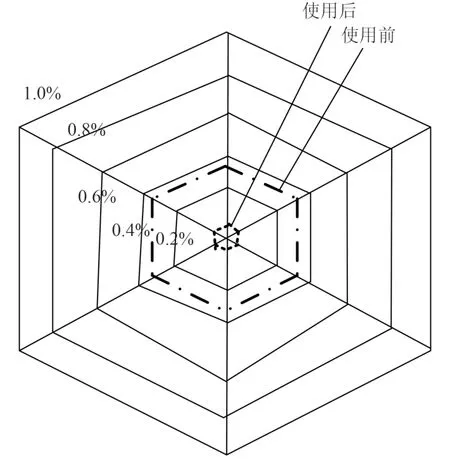
图7 转速偏差率测试结果Fig. 7 Speed deviation rate test results
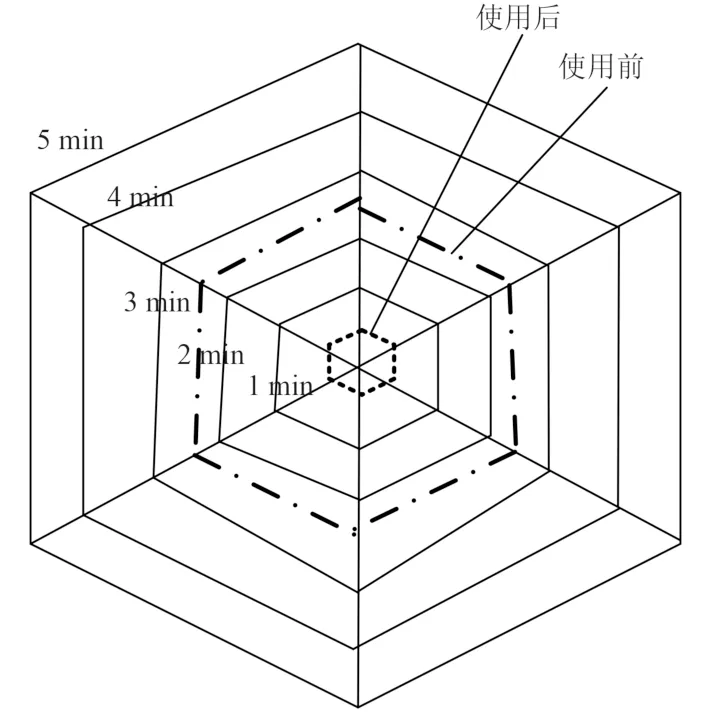
图8 转速稳定时间测试结果Fig. 8 Speed stability time test results
可以看出,本文方法使用后,船舶燃气轮机转速偏差率最小,控制在0.1%之内,转速稳定时间最短,控制在1 min 之内。对比可知,本文方法的使用,可优化船舶燃气轮机转速控制精度、控制速度,转速控制稳定性较高。
3 结 语
燃气轮机凭借效率高、可靠性显著等优点,被广泛使用在船舶上。燃气轮机转速控制,是燃气轮机发电机组可靠运行的重点问题。本文针对船舶燃气轮机转速控制问题进行专题研究,提出了基于状态检测的船舶燃气轮机自适应模糊控制方法,并在实验中对本文方法进行性能测试,测试结论如下:
1)本文方法使用下,船舶燃气轮机低压转速、高压转速的控制均与给定值匹配,转速的变化趋势不存在明显超调状态。
2)本文方法使用后,船舶燃气轮机转速偏差率最小,控制在0.1%之内,转速稳定时间最短,控制在1 min之内,具有使用价值。
猜你喜欢
小哥白尼(野生动物)(2021年3期)2021-07-21 02:28:38
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38
汽车维护与修理(2015年6期)2015-02-28 12:17:16
汽车维护与修理(2015年2期)2015-02-28 12:15:44
汽车维护与修理(2015年2期)2015-02-28 12:15:42
燃气轮机技术(2014年4期)2014-04-16 03:54:07
燃气轮机技术(2014年4期)2014-04-16 03:54:04
