整秆式高效智能甘蔗收割机的设计与研发
2024-01-01 00:00:00张胜忠张华伟涂伟浩蔡钟庆
广西糖业 2024年3期


摘要:开展整秆式高效智能甘蔗收割机设计与研发工作,为解决整秆式甘蔗收割机收获效率低、整机智能化水平不高问题提供参考依据。在现有整秆式甘蔗收割机功能的基础上,设置扶蔗、剥叶、升降切割和收割暂存等自动化控制关键模块,实现在线一体化自动扶蔗、导入、夹固、切根(刀盘自动升降)、断尾、传送、剥叶(自动调整)、甘蔗收集和暂存等功能,可一次性完成甘蔗的扶起、切梢、切根、提升、剥叶、集斗和田间转运工作。其中,甘蔗切根过程中依据自行设计研发的割台自动仿地形系统,可控制割台根据地形变化自动保持在入土20.0 mm左右切割,最大程度降低甘蔗的破头率和损失率;甘蔗剥叶结构可进行高效脱叶和粉碎分离,并有效降低其含杂率。本研究设计研发的整秆式高效智能甘蔗收割机智能化水平较高,适用于不同田间地形开展甘蔗收割作业,并有效提高收割效率。
关键词:甘蔗收割机;整秆式;设计与研发;高效智能;收割效率
中图分类号:S225.53
0" 引言
甘蔗具有喜热和含糖量高等特点,大面积种植于我国广西、广东、海南和云南等省(区),蔗糖产量占我国食糖总产量的90%以上,因此,甘蔗产业已成为我国制糖产业健康发展的重要保障[1-2]。目前,我国大部分蔗区的甘蔗收割以传统人工收割为主,存在劳动强度大和收割效率低等问题[3-4],推动甘蔗收割生产全面机械化、产业化和智能化发展已成为解决上述问题的核心要素。市场上流通的甘蔗收割机分为切段式高效智能甘蔗收割机和整秆式高效智能甘蔗收割机2种类型[5],其中,切段式甘蔗收割机通过扶蔗、切梢、收割、切段、清选、装载和蔗叶切碎还田等工序完成甘蔗收割和切断,但其现收割和现切断的机械化作业特点容易引发宿根破头率高和含杂率高等问题,且对榨糖加工时效性要求较高[4],因而适用范围较小;整秆式甘蔗收割机通过在线扶蔗、导入、夹固、切根、断尾、传送、剥叶、甘蔗收集和暂存等工序完成整根甘蔗收割[6],具有收割甘蔗含杂率低、甘蔗损失量小和不易变质的机械化收割作业特点,在甘蔗收割机械化设备中占据主要地位,也已成为蔗农收割甘蔗的首选机械化设备[7],但我国在引入国外中大型整秆式高效智能甘蔗收割机时,未充分考虑我国各地甘蔗种植分散和田间小块种植等特点[8],在使用过程中存在机器系统配套不合理、农机与农艺技术不匹配等问题[9]。具体表现为:国内多数蔗农种植甘蔗的农艺技术(行距)非标准化,中大型整秆式高效智能甘蔗收割机无法实现收割,同时,不能适应小地块作业要求[10];甘蔗收割机切根装置无法自动调节以适应甘蔗种植地形高度,很容易产生宿根破头率过大问题[11-12];甘蔗剥叶装置实现甘蔗与蔗叶分离程度不高,剥叶不彻底,甘蔗与蔗叶纠缠在一起,造成含杂率过高和除杂通道堵塞[13];甘蔗收割机整机作业智能化水平不高,不能在线一次性完成甘蔗的扶起、切梢、切根、提升、剥叶、集斗和田间转运工作[14]。为此,在国家政策的大力支持下,自主设计契合我国甘蔗农艺要求的甘蔗收获机得以研发并迅速发展。迄今,我国自主研发的整秆式甘蔗收割机机型仍存在重量较重不适合分散种植的田间作业、地形感知智能控制应用性不强、机型作业适应性差和对倒伏甘蔗有效作业程度低等问题[15-16]。因此,本研究在整秆式甘蔗收割机的基础上,通过设置和完善整秆式甘蔗收割机整机及关键作业部件的智能控制模块,实现在线智能一体化自动扶蔗、导入、夹固、切根(刀盘自动升降)、断尾、传送、剥叶(自动调整)、甘蔗收集和暂存等功能,旨在为满足我国甘蔗复杂多样化的农艺要求并兼顾提高甘蔗收割效率和质量提供技术支持。
1" 整秆式高效智能甘蔗收割机的整体结构
1.1总体结构
从图1可看出,设计的整秆式高效智能甘蔗收割机总体结构包括底盘系统、动力系统、集成化智能驾驶系统和工作作业机构(含扶蔗机构、仿地形切割机构、双层夹持提升装置、液压切梢机构、甘蔗剥叶除杂机构和自卸式料仓)。此外,还设置和完善甘蔗收割过程关键作业工序的自动化控制关键模块,以一次性完成甘蔗的扶起、切梢、切根、提升、剥叶、集斗和田间转运工作,从而提升整秆式高效智能甘蔗收割机的收割效率和收割质量。
在甘蔗收割过程中,底盘系统用于带动整秆式高效智能甘蔗收割机移动,动力系统用于为底盘系统移动和各作业机构提供驱动力,集成化智能驾驶系统用于调节甘蔗割堆机的移动方向和移动速度,扶蔗机构用于对甘蔗进行拨离和扶起,液压切梢机构用于对甘蔗进行切梢,仿地形切割机构用于对甘蔗根部进行整齐切断,双层夹持提升装置用于对甘蔗进行柔性夹持,甘蔗剥叶除杂机构用于对甘蔗进行剥叶除杂,自卸式料仓用于对收割完成的甘蔗进行收集并自动卸料。由此可见,通过配置相互配合的底盘系统、动力系统和集成化智能驾驶系统,配备设计开发自动化智能控制工作作业机构(含扶蔗机构、仿地形切割机构、双层夹持提升装置、液压切梢机构、甘蔗剥叶除杂机构和自卸式料仓),兼顾提高甘蔗收割效率和收割质量,整秆式高效智能甘蔗收割机可实现智能化在线一次性完成甘蔗整秆式联合收割工作流程。
1.2工作流程
整秆式高效智能甘蔗收割机采用整秆式收割,可完成整条甘蔗的收获和运输,避免糖分流失并降低含杂率,其具体收割流程见图2。
从图2可看出,整秆式高效智能甘蔗收割机收割甘蔗时,首先利用液压电动马达带动皮带传动已能自动捋直、夹紧甘蔗并导入切割机构部件中,依据蔗地地形高度的变化自动调整切割台高度,控制割台根据地形变化自动保持在入土20mm左右切割,最大程度降低甘蔗的破头率和损失率,实现甘蔗整齐切根和断尾。随后,利用甘蔗剥叶组件对甘蔗进行上、中、下全方位剥叶,进行高效脱叶并粉碎分离,有效降低含杂率。最后,剥叶的甘蔗被收集暂存至料仓,等待田间转运和装卸。
2" 关键智能控制模块的设计与研发
2.1自动扶蔗模块
为提高甘蔗整体收割效率,需自动调节扶蔗部件与地面的距离在甘蔗根部附近,因此需设计开发整秆式甘蔗收割机的自动扶蔗模块。
首先,通过第一液压马达带动第一皮带轮转动,第一皮带轮带动第二皮带轮转动,第二皮带轮带动固定秆和第一导蔗齿轮盘转动。此时,第一导蔗盘上的齿块依次将捋直的甘蔗逐条往切割部件方向移送,可有效避免牵引车主体前进时将捋直的甘蔗全部涌入切割机构部件中,减少后续工序发生堵塞。随后,通过在支撑框架和悬挂架2侧均设置导入秆,能扩大将地上甘蔗导入支撑框架与悬挂架间的范围,从而使更多甘蔗得到捋直切割,提高甘蔗整体收割效率。最后,设置调节部件以带动支撑框架和悬挂架向上、下移动,调节扶蔗部件与地面的距离,以避让地面障碍物并使扶蔗部件处于甘蔗的根部附近,便于扶蔗部件带从甘蔗底部向上梳捋,从而使甘蔗捋直效果更好,收割更稳定。
2.2自动剥叶模块
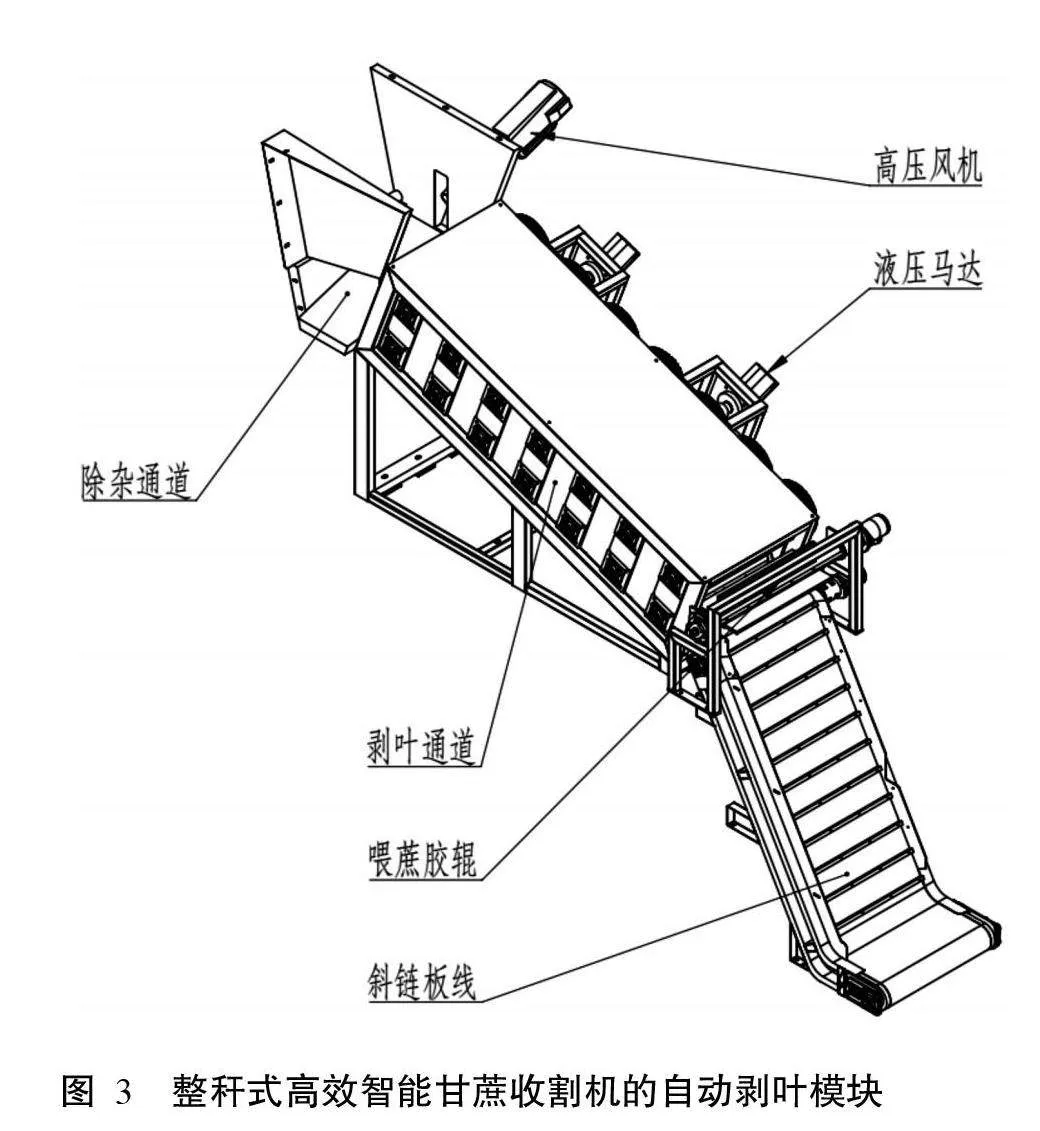
为提高甘蔗剥叶自动化程度,增强实用性,需设计开发整秆式甘蔗收割机自动剥叶模块。该模块主要由斜链板线、喂蔗胶辊、剥叶通道和除杂风机等部件组成(图3)。其中,斜链板线用于将甘蔗输送给喂蔗胶辊;喂蔗胶辊用于依次将甘蔗输送给剥叶通道;除杂风机用于再次对甘蔗叶进行分离以确保剥叶干净。
在自动剥叶模块安装过程中,设置液压动力系统于甘蔗剥叶组件后端、甘蔗叶切割组件和甘蔗叶打捆组件的上端,甘蔗输送组件设置于甘蔗剥叶组件、甘蔗叶切割组件、甘蔗叶收集打捆组件和液压动力系统的两侧,通过甘蔗输送组件将甘蔗输送至甘蔗剥叶组件处进行剥叶,再通过甘蔗叶切割组件和甘蔗叶收集打捆组件对剥落的甘蔗叶进行切割和打捆整合,最后通过甘蔗输送组件将剥叶后的甘蔗输送至外部。此外,自动剥叶模块采用甘蔗剥叶组件、甘蔗叶切割组件和甘蔗叶打捆组件的结构设计对收割的甘蔗进行剥叶处理。其中,甘蔗剥叶组件进行上、中、下全方位剥叶,并将剥落的甘蔗叶进行切割和打捆处理。打捆后的甘蔗叶堆通过出料口放置于田间,后续甘蔗叶还可再次作为饲料及环保原料加工利用,极大促进甘蔗整体的充分应用。
2.3自动升降切割模块
在整秆式甘蔗收割机中设置自动升降切割模块以适应不同甘蔗种植地形高度下收割,能有效实现多地形、蔗地起伏高度多变化的甘蔗整齐切割。该模块主要包括机械部分和控制部分。其中,机械部分根据实际甘蔗收割机切割部分原理制作,并对收割机切割系统的压马达、液压缸、切割刀盘和升降机构等部件进行适当还原;切割刀盘能模拟收割机进行土壤和甘蔗切割,液压缸可对刀盘进行自动升/降调节;控制部分功能可实现依据甘蔗种植土壤高度变化来控制液压缸升/降,达到自动调节刀盘高度适应及确定甘蔗最佳收割位置的目的。
2.4自动收集暂存模块
结合压力传感器的甘蔗暂存量限重检测和甘蔗收集暂存集蔗料仓接触顶部橡胶层防滑设置特点,设置整秆式甘蔗收割机的自动收集暂存模块,以实现在线对已收割甘蔗的收集、暂存和倾倒。
首先,通过设置液压马达以实现在线对已收割甘蔗的集中收集,其流程为:(1)闭合外部电源启动液压马达,利用压力传感器检测接触板上甘蔗质量,当甘蔗质量小于100.0 kg时,压力传感器内部转换元件将检测出的数值转换为电信号,并将电信号传输至液压马达,液压马达接收电信号后驱动输出轴带动第一齿轮顺时针转动一定角度;(2)第一齿轮、第二齿轮和第三齿轮转动时,第二齿轮带动第一转秆和第一弧形夹逆时针转动一定角度,第三齿轮带动第二转秆和第二弧形夹顺时针转动一定角度,第一弧形夹与第二弧形夹向下处于张开状态,此刻传送机构将甘蔗倒入第一弧形夹与第二弧形夹间,甘蔗以自身重力向下移动并靠在弧形夹和接触板上;(3)当靠在接触板上甘蔗的质量大于100.0 kg时,底部压力传感器检测出的相应数值将电信号传输至液压马达,液压马达驱动第一齿轮逆时针转动,带动第一转秆顺时针、第二转秆逆时针转动,使第一弧形夹和第二弧形夹向上将甘蔗夹持,从而将甘蔗进行集中收集,方便后续将收集的甘蔗进行集中捆绑。
随后,通过设置气缸,压力传感器实现对已收集的一定重量甘蔗的倾倒,具体工作流程为:(1)当压力传感器检测到接触板上甘蔗质量小于100.0 kg时,将检测数值信息转换为电信号,电信号被传输至气缸后,气缸将接收电信号并控制驱动秆向左移动;(2)驱动杆带动挡块顺时针转动一定角度与甘蔗处于垂直状态,利用挡块挡在甘蔗的一侧,可避免进入第一弧形夹与第二弧形夹中的甘蔗倾倒至地面影响对甘蔗的集中收集。
此外,为防止甘蔗收集与倾倒过程中甘蔗易滑落问题,在接触板顶部安装有橡胶层增加甘蔗与接触板间的摩檫力,可有效避免甘蔗在被接触板支撑时滑动至地板。该方法能提高甘蔗的收集效率,减少甘蔗丢失和浪费。
3" 结语
应用现代自动控制技术推动整秆式甘蔗收割机技术专业化、智能化发展以适应甘蔗收割地形、倒伏甘蔗有效作业等多变机械化作业情况,是促进甘蔗收割生产全面机械化和制糖企业繁荣的核心要素。本研究研发的整秆式甘蔗收割机通过设计和完善自动扶蔗、剥叶、升降切割和收集暂存等关键作业部件的功能,使整秆式甘蔗收割机结构轻简化,能有效满足小块田间分散种植甘蔗的智能高效收割,方便甘蔗流转,更适应我国甘蔗农艺生产特点,比传统整秆式甘蔗收割机具有更大优势。
参考文献:
[1]吴建明,李燕娇,邓宇驰,等. 中国甘蔗栽培的研究进展[J]. 广西科学,2022,29(4):613-626.
[2]游建华,方峰学,陈引芝,等.广西甘蔗生产机械化现状及发展对策[J].中国糖料,2008(4):69-72.
[3]黄俊鸣. 4Q-85KW整杆式高效智能甘蔗收割机的设计与研发[J]. 南方农机,2018,49(15):88.
[4]程绍明, 王俊, 王永维. 我国整秆式高效智能甘蔗收割机的现状和问题[J]. 现代农业科技, 2013(20):2.
[5]刘恩辰,葛动元,罗信武. 小型整秆式甘蔗收割机改进设计与分析[J].中国农机化学报,2018,39(4):14-20.
[6]梁小军. 整秆式高效智能甘蔗收割机收获模式探讨[J].广西农业机械化,2015(5):14-15.
[7]蒋占四,李尚平,邓劲莲. 甘蔗收割机械智能设计系统的研究开发[J]. 计算机辅助设计与图形学学报,2004, 16(12): 1755-1757.
[8]刘丽敏,任萍,陈建能,等. 基于作物力学特性的甘蔗收割机参数优化与田间试验[J]. 浙江农业学报,2023,35(5):1187-1194.
[9]郑小兵.整秆式甘蔗收获机新的生命力[J].农机市场,2020(11):28-29.
[10]覃凯化.新时期提升广西甘蔗生产机械化水平的策略[J].农业技术与装备,2021(7):42-23.
[11]高鸣伟,陈鑫. 基于Automation Studio的甘蔗收割机刀具高度自适应仿真[J]. 南方论坛,2023,54(17):25-28.
[12]董哲,陆静平. 基于模糊PID控制的甘蔗收割机刀盘仿形系统设计及仿真[J].中国农机化学报,2021,42(11):18-22.
[13]武涛,任甲辉,刘庆庭,等. 4GDZ-132型切段式整秆式高效智能甘蔗收割机研制[J].农业工程学报,2022,38(10):30-38.
[14]鲁华. 广西甘蔗收获机械化技术路线比较分析[J]. 农机质量与监督,2021(3):30-32.
[15]张胜忠, 张华伟. 一种基于立秆式自动甘蔗收割机传送装置:2021221748516[P]. 2022-03-22.
[16]肖威,陆静平. 甘蔗机械化收获技术现状分析[J].中国农机化学报,2022,43(2):56-65.
(责任编辑" 思利华)