基于多视角数字全息的微尺度液滴表面结构三维测量研究
2024-01-01 00:00:00宗子建,伍岳
车用发动机 2024年4期
关键词:液滴




摘要: 数字全息技术在发动机燃烧、喷雾、排放中产生的微尺度液滴的三维结构测量中有着广泛的应用,但是过去的数字全息技术仅能获得椭球形假设下的液滴大致形状,难以获得完整的三维表面形状信息。针对毫米级液滴的三维表面形状开展测量,开发了一种新型的多角度共轴全息系统,使用7台相机从不同方向上同步拍摄毫米级液滴的全息图,通过将不同方向上获得的全息图耦合,获得较为完整的物体表面点云阵列,从而得到较精确的物体表面形状。该系统可以较为准确地测量毫米级物体的三维表面形状,在发动机内部过程诊断工作中有一定应用潜力。
关键词: 数字全息;液滴;三维测量技术;误差修正
DOI: 10.3969/j.issn.1001-2222.2024.04.010
中图分类号:TN247文献标志码: B文章编号: 1001-2222(2024)04-0071-08
数字全息技术利用光学衍射过程实现被记录物体三维结构的全息再现,对于微米至毫米级别尺度的液滴、气泡、颗粒物等对象的外形结构测量准确性 较高,因此被广泛应用在发动机喷雾、燃烧和排放的三维测量[1-4]。数字全息技术作为一种三维测量技术,相比于传统的非介入性光学测量技术而言,最大的优势是可以通过单一光路获得被测物体的三维信息,包括形状、位置和速度[5],同时精度相比传统的光学测量方法更高。然而,单一光路的数字全息技术,仅能获得椭球形假设下的液滴大致形状,无法获得较为准确的物体三维表面形状信息,如何确定准确的三维物体表面形状,是目前数字全息技术的主要研究方向之一[6]。
针对基于数字全息技术的物体三维表面形状的测量,国内外学者已开展了一些研究[7-11]。美国明尼苏达大学的洪家荣团队[12]采用椭球形假设,进行三维拟合,完成了在空化流场尾流脱落气泡的测量。美国哥伦比亚大学的Nayar团队开发了一种图像计算处理方法,可以获得图像中隐藏的三维信息[13],并在人脸识别与三维重构领域上取得突破,重构精度可以达到100 μm[14]。上海交通大学的蔡伟伟团队[15]使用多组相机对被测火焰进行拍摄,假设三维火焰充满被测区域,然后利用基于数字全息技术开发得到的空间雕刻法对三维重构火焰进行修正,获得了较为理想的火焰燃烧过程。日本京都工业大学Fukuda团队[16]开发了一种高精度的平行相位移全息技术,通过使用不同振幅的激光获得多幅全息图,再将这些全息图组合,获得了精度较高的三维全息重构结果,并应用于虚拟全息影像领域。美国约翰霍普金斯大学Katz团队[17]开发了一种彩虹全息三维重构技术,利用不同波长的光从不同角度照射同一个物体,获得多幅彩色全息图,利用不同波长下生成的拥有不同特点的全息图进行三维重构,生成三维重构图,该技术计算速度较快,但精度有限。此外还有应用在特殊场景,利用特殊材料的光敏特性进行三维全息重构的研究记录,例如北京分子科学国家实验室开发了一种单晶氧化铁纳米片,利用这种材料对血红细胞进行三维重构,获得了较为理想的效果[18]。总而言之,当前虽然已有许多基于数字全息技术开发的微尺度物体三维形态测量方法,但是这些方法普遍存在适用性和精度不可兼得的问题,某些方法还存在验证困难的问题。
本研究基于数字全息技术原理,结合三维层析成像理念,采用多台相机从空间不同角度同步拍摄被测对象,结合全息图再现和三维拟合方法,对毫米尺度的液滴表面结构进行三维重构,并完成了单一液滴表面位置信息的精确描述,实现了较高的三维测量精度。
1多角度数字共轴全息测量方法
1.1试验装置
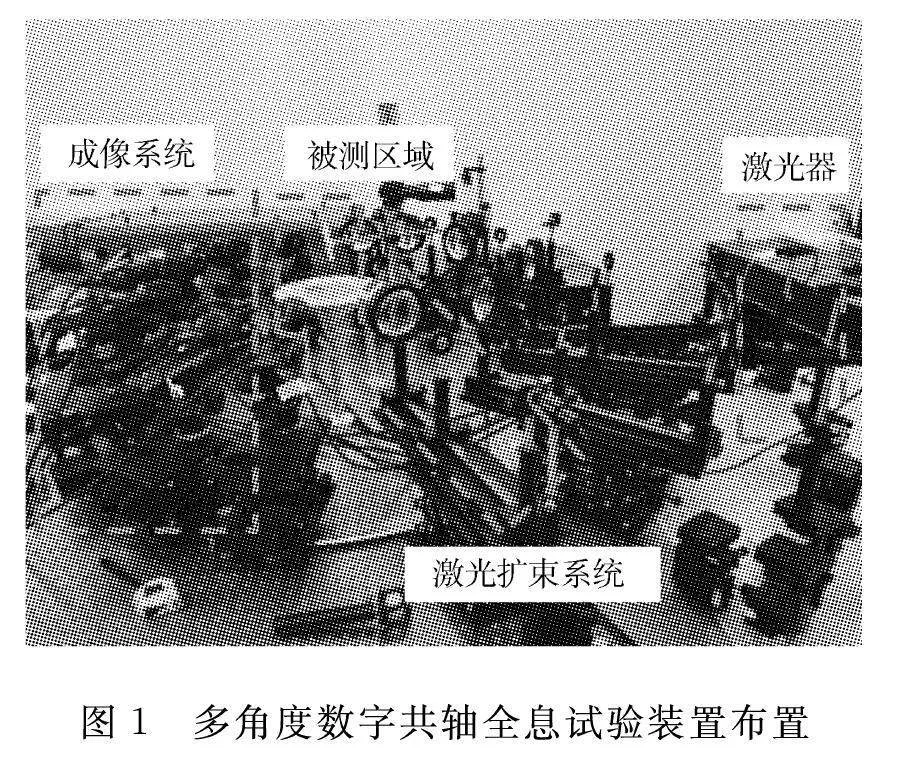
本研究的试验部分于北京理工大学西山试验区的发动机研究所光学实验中心完成。如图1所示,试验在2 m×1.4 m×0.8 m的光学试验台上开展,使用直径为1.2 m的环形导轨固定升降台,总共使用7组升降台,升降台控制三维云台的高度,三维云台控制相机的空间角。此次试验测试对象为10 mL针管中滴下的水滴,水滴落下的速度大约为20 mm/s,针管固定在支架上,水滴为不规则球形,最大直径约为3 mm。车用发动机2024年第4期2024年8月宗子建, 等: 基于多视角数字全息的微尺度液滴表面结构三维测量研究
此次试验总共使用7台高分辨率工业相机(Manta 507B),7台相机均匀布置在环形导轨180°范围内(见图1)。其中1台相机作为同步触发源,使用自带的内触发模式同步触发其余6台相机,具体步骤是将作为触发源相机的输出线与其余6台相机的输入线相连,将触发源相机改为内触发模式,并设定采样频率、单帧曝光时间、采样次数等参数,然后将其余6台相机的触发模式改为外触发模式,并同步其他参数,即可实现所有相机的同步拍摄。经测试,所有相机之间的最大拍摄延迟小于1 μs,由于被测液滴下落速度较慢,由拍摄延迟过程引起的各相机液滴位置错动可忽略。
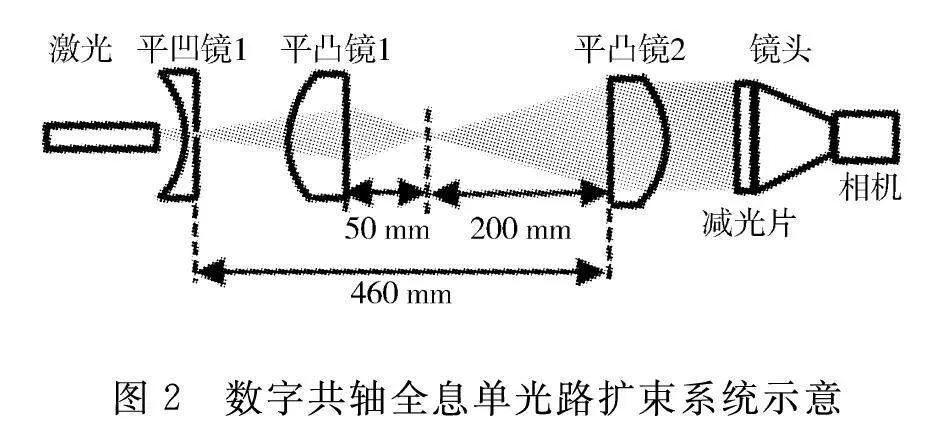
本试验采用多角度共轴全息系统对单一液滴进行拍摄。单一视角的共轴全息系统如图2所示,该系统由激光器、激光扩束系统和成像系统组成,其中激光轴线、扩束系统轴线与成像系统轴线重合。激光器采用雷佰 527 nm连续激光器,其功率为80 mW,产生的初始激光光斑直径约为3 mm。激光扩束系统由直径50 mm/焦距160 mm的平凹镜1、直径25 mm/焦距50 mm的平凸镜1和直径100 mm/焦距200 mm的平凸镜2组成。所有透镜共轴,并通过三维支架、连接杆、立柱和滑块安装在直线导轨上,扩束系统总长度为460 mm,可将光源扩束为直径45 mm的圆柱形平行光,放大倍率大约为15。成像系统由减光片、镜头和相机组成。减光片为OD2全波长吸收滤片,光学信号通过率为1%,镜头为Nikkon 105 mm微距镜头,相机成像平面的像素分辨率为2 502×2 048,像素尺寸为3.45 μm,采样帧率设置为30 fps,单帧曝光时间为 100 μs。
为实现后续步骤中对液滴形貌的三维重构,需要首先完成所有相机空间位置和角度的标定。本研究采用基于Matlab平台的多相机同步标定算法[19]完成成像系统标定,并将系统聚焦位置设置为距被测物体30 mm,靠近成像系统。标定后的系统物像比为1∶1.12,拍摄获得的图片实际物理尺寸为8.5 mm×7.0 mm。
1.2计算公式
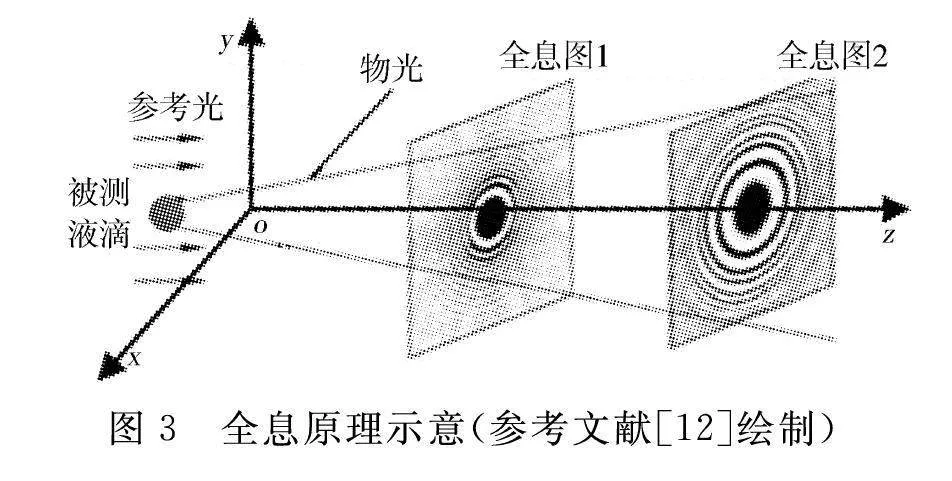
全息技术利用了光的衍射与干涉原理。激光经过目标物体时发生衍射现象产生偏移形成物光,没有经过目标物体的光形成参考光,物光与参考光发生干涉现象生成明暗相间的条纹被记录在相机底片上[20](如图3所示),衍射光传播的距离不同,在相机底片上生成的衍射条纹形状不同。基于相机1建立左手系直角坐标o-xyz,其中坐标原点o定义为相机1拍摄图像的中心点,z轴定义为光路方向,被测目标物体位于xoy平面。在共轴全息系统中,物光和参考光共同作用,在相机成像平面形成干涉条纹并生成全息图,该全息图可采用衍射公式进行数学重建,还原发生衍射的物体所在的空间位置信息。因此,全息技术可以概括为“干涉记录,衍射重建”。
全息试验使用的衍射公式有菲涅尔衍射公式和角谱衍射公式,一般情况下,衍射距离较长时使用菲涅尔衍射公式计算效果较好,衍射距离较短时使用角谱衍射公式计算效果较好。本研究采用角谱衍射公式:
upx,y,d=Ikx,yHfx,fy。(1)
式中:upx,y,d为目标区域的三维光学信号场;Ikx,y为全息图中的信号强度分布;为卷积计算符号;Hfx,fy为衍射现象的传递函数。
Hfx,fy=expj2πλd1-λfx2-λfy2。(2)
式中:λ为激光波长;d为计算位置与系统聚焦平面的z方向距离;fx=x/λd,fy=y/λd。在实际计算过程中,为求解式(1),使用衍射公式的傅里叶变换形式完成计算:
upx,y,d=
FFT-1FFTIkx,yHfx,fy。(3)
式中:FFT和FFT-1分别为正向和逆向快速傅里叶变换运算符号。
2数据处理与结果展示
2.1数据处理过程
本试验的图像数据处理过程分为以下几个步骤:相机标定、数值重建、二值化和三维重构。
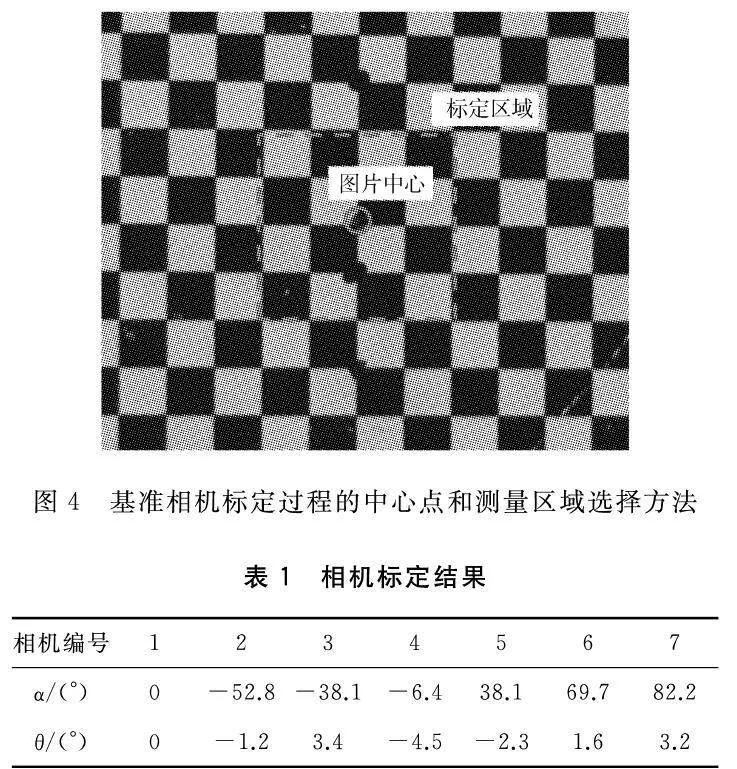
首先,为完成多角度全息同步拍摄,分两次对相机进行标定:第一次标定确定所有7台相机在基于相机1建立的直角坐标系o-xyz中的空间角度信息;第二次标定确定各相机的聚焦位置。在第一次标定中,7台相机在不同的空间位置对同一标定板进行拍摄(如图4所示),标定板图案由多个3 mm×3 mm的黑白方格组成。在不同空间角度观测下,标定板图案将发生不同程度的变形。在所有相机拍摄的标定图像中选取相同的4×4网格区域,采用多相机同步标定算法[19],定量获取网格图像的变形信息,进而确定各台相机空间角度信息,即平转角α(相机光轴在xoz平面的投影与z轴正方向的夹角)和俯仰角θ(相机光轴与xoz平面的夹角)。标定结果如表1所示。可见基准相机(相机1)的平转角α为0,各相机在-90°~90°近似平均分布。所有相机的仰角均较小。在标定过程中,所有相机均拍摄到标定板棋盘格上的图片中心点,标定过程可将所有相机的光轴汇聚至该点。
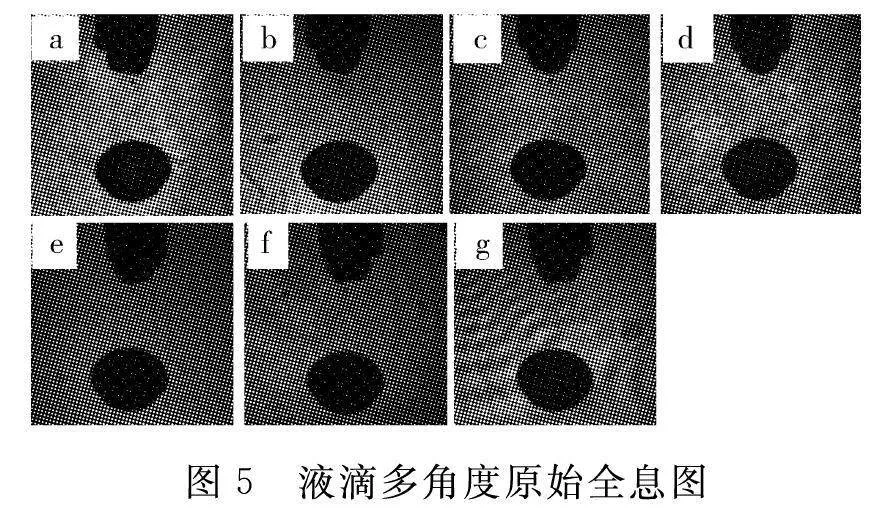
由于数字全息技术是一种离焦拍摄技术,因此需要将标定板前移进行第二次标定,标定出相机的放大率。第二次标定时标定板位置为实际拍摄时相机的聚焦位置,由于拍摄时液滴位于聚焦平面后方,因此拍摄的全息图中的液滴基本处于离焦状态。7台相机同步拍摄的液滴照片如图5所示,各相机均能捕捉液滴下落过程中某时刻所处位置(位于相机成像区域下方),同时也呈现了液滴滴管出口的位置信息(位于成像区域上方),各相机同步性良好,图片在液滴下落方向上的位置错动可忽略不计。此外,各相机原始图像的背景亮度和信号分布有一定差异,这是由各独立数字共轴全息系统内部组件成像差异造成的,对液滴结构的影响可忽略。
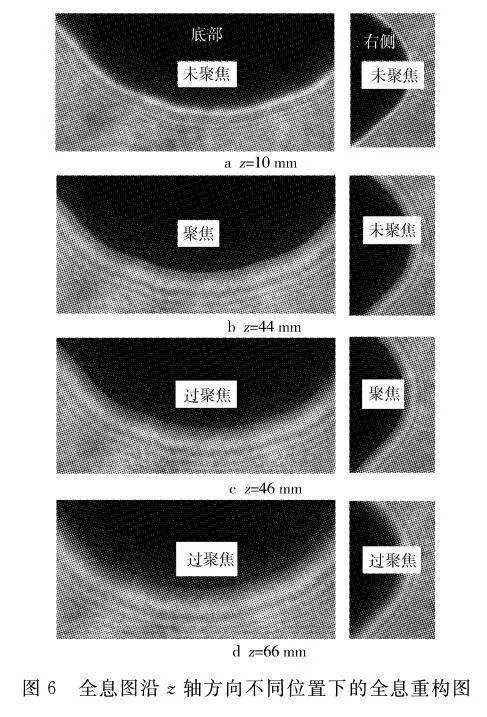
为获得被测液滴的三维信息,需要使用衍射公式对原始拍摄的全息图进行数值重建。首先对各相机图片进行裁剪,设置计算的区域像素尺寸2 000×2 000,再使用前文中提及的式(3)对全息图沿z轴方向进行数值重建。由式(3)可知,根据光的传播距离不同,计算得到的全息重构图各不相同,因此,沿z方向设置步长1 mm,在不同z轴位置进行全息图重建,从而获得一组全息重构图。这些全息图上所有点的聚焦状态各不相同,如图6所示,同一段边界在不同z轴位置下出现了不同的聚焦状态,如底部边界由z为10 mm至z为66 mm的过程中经历了未聚焦—聚焦—过聚焦。同时,液滴各位置边界并不能在某个z轴位置实现同时聚焦,如图6b和图6c所示,底部边界在z=44 mm聚焦,而侧面边界在z=46 mm聚焦。在全息图重构过程中,液滴边界聚焦状态简单判断的依据是全息图的衍射条纹边界清晰程度。在重构过程中,全息图的衍射条纹发生变化,在液滴边界上形成条带状亮斑,此时液滴边界并未聚焦,如图6a中所示。当液滴边界的亮斑消失时,在全息重构图中液滴边界清晰可见,液滴边界内外的噪点信息很少,此时的液滴边界处于聚焦状态,如图6b和图6c中的聚焦状态所示。当液滴边界出现较强的噪点信息时,液滴边界处于过聚焦状态,如图6d所示。这种聚焦状态的判断方式是基于图像信息的主观判定,仅用作初步判断,后续使用最小亮度法(见图7),可通过图像亮度分布信息实现聚焦状态的准确判断。由于液滴边界的聚焦位置是其在三维空间中所处的真实位置,所以通过扫描z方向各位置全息图,可确定液滴边界上各点的空间位置。
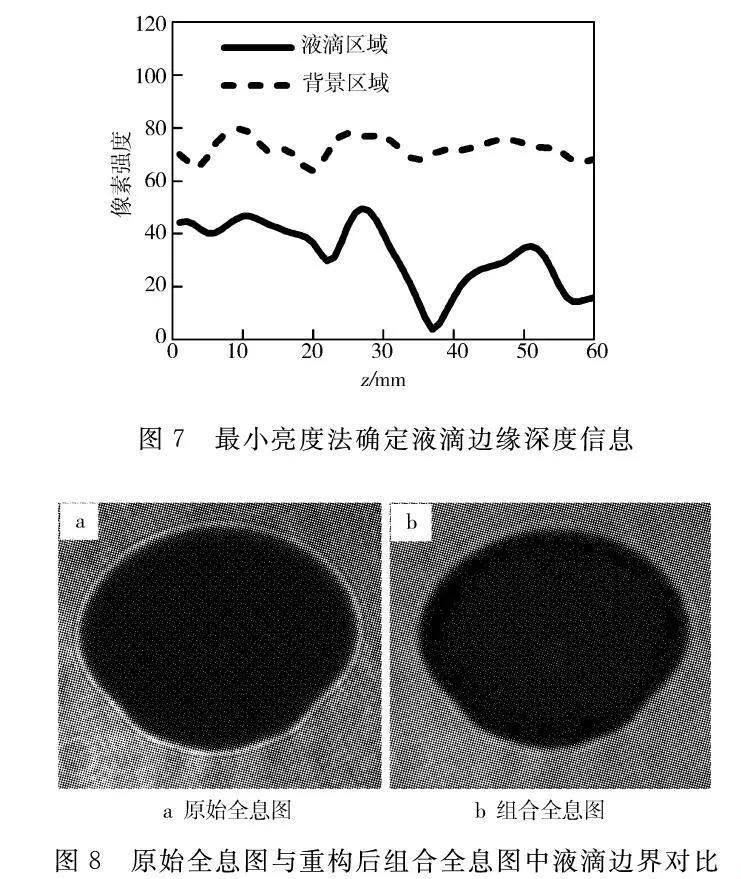
为准确判断液滴各边界位置的聚焦情况,本研究采用最小亮度法[21]进行处理。如图7所示,研究沿z轴分布的全息图片族中相同位置像素(即x和y坐标相同)的信号变化规律,将该像素的z轴坐标作为横坐标,将该像素灰度值视作像素强度并作为纵坐标。由图7可知,如果该像素点位于液滴内部,则该点的强度曲线上会出现一个明显的波谷,而且像素强度最小值远小于平均值;如果该点位于无液滴的背景区域内,则该点像素强度曲线无明显波谷。因此,根据图7展示的像素强度规律,可判定每个像素强度最小值所对应的z轴位置为该像素的聚焦位置。对所有像素都进行以上处理,可获得组合全息图,如图8所示。将组合全息图与原图对比可知,组合全息图中衍射条纹消失,所有液滴边界均处于聚焦状态。由于在计算组合全息图时已获得液滴边界上各点的聚焦位置(即z坐标),由结合组合全息图中提供的x和y坐标,即可获得液滴边界的三维位置信息。组合全息图在全息图的处理过程中十分重要,因为组合全息图是后续生成二值化图像、完成液滴边界点精准提取的关键。
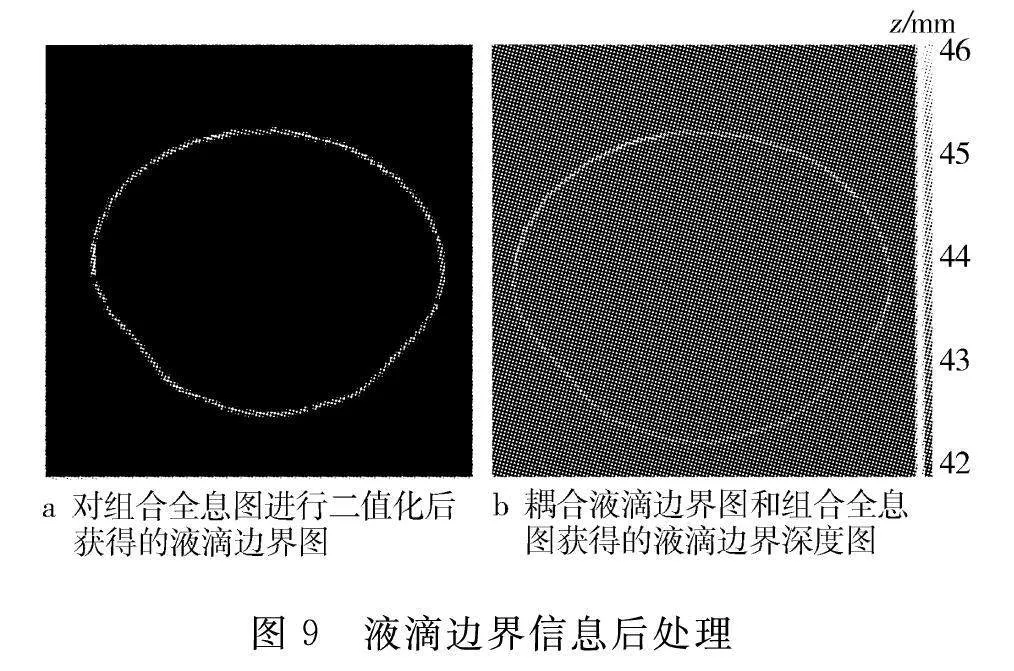
根据最小亮度法,可有效判断组合全息图中的像素点所处位置(液滴区域或背景区域)。因此,进一步对组合全息图进行二值化处理,获得二值图像。在二值图像的基础上使用Matlab图像处理模块中的Sobel算子提取液滴边界线图像,该算子将图像中每个像素的相邻4个像素灰度值进行加权,加权值在液滴边界线处达到极值,从而实现边缘检测的目的,如图9a所示。在已获得的组合全息图(见图8b)中,原始全息图中的各点在空间中的三维坐标已经确定,再结合液滴边界图(见图9a),可以得到液滴边界上各点的三维坐标分布图(见图9b)。图9b主要体现了液滴边界点在z轴方向上的坐标,因此也被称为深度图。如图9b所示,从深度图上可以看到液滴边界在z方向上的位置分布,这与全息图重构过程中得到的结论吻合。
处理单组全息图数据后,需要按照同样的方法处理剩余6组全息图数据。由于在处理全息图数据时默认采用的都是基于各相机成像平面的三维坐标系,因此,需要利用各相机在基准坐标系o-xyz中的空间方向角对全息计算结果进行坐标转化。在之前的相机标定步骤中,已建立了以相机1为基准的三维直角坐标系,因此相机1的数据不需要进行坐标变换。对于相机2至相机7,需要依次进行三次坐标变换。第一次坐标变换的目的是将以该相机建立的坐标系原点与相机1坐标系的原点重合,由相机标定步骤可知,7台相机已经确定共同的坐标原点o,该点可以被7台相机同时捕捉,该点在不同相机的三维坐标系中的坐标通过全息图计算得到。对相机2至相机7获得的所有液滴边界点进行第一次坐标变换,第一次坐标变换公式为
x1=x-x0
y1=y-y0
z1=z-z0。(4)
式中:x0,y0,z0是以相机1为基准建立的坐标系原点o在进行该视角下全息计算获得的坐标o(x0,y0,z0);x1, y1, z1为相机2至相机7成像平面内任一点P进行第一次变换后的新坐标P1(x1, y1, z1)。经过第一次坐标变换后,7台相机各自建立的三维坐标系原点重合,但x轴、y轴和z轴并不重合。第二次坐标变换将相机2至相机7的三维坐标系按照前序标定步骤获得的俯仰角θ进行坐标旋转,可以将7组坐标系的z轴重合,第二次坐标变换公式为
x2=x1
y2=z1sinθ+y1cosθ
z2=z1cosα-y1sinθ。(5)
式中:θ为表1中的俯仰角;x2, y2, z2为点P进行第二次变换后的新坐标P2(x2, y2, z2)。经过第二次坐标变换,7台相机的三维坐标系原点和z轴重合,但x轴和y轴并不重合。将相机2至相机7的三维坐标系绕z轴按照标定步骤中标定的平转角α进行旋转,可以将7组坐标系的x轴和y轴重合,第三次坐标变换公式为
x3=x2cosα-y2sinα
y3=x2sinα+y2cosα
z3=z2。(6)
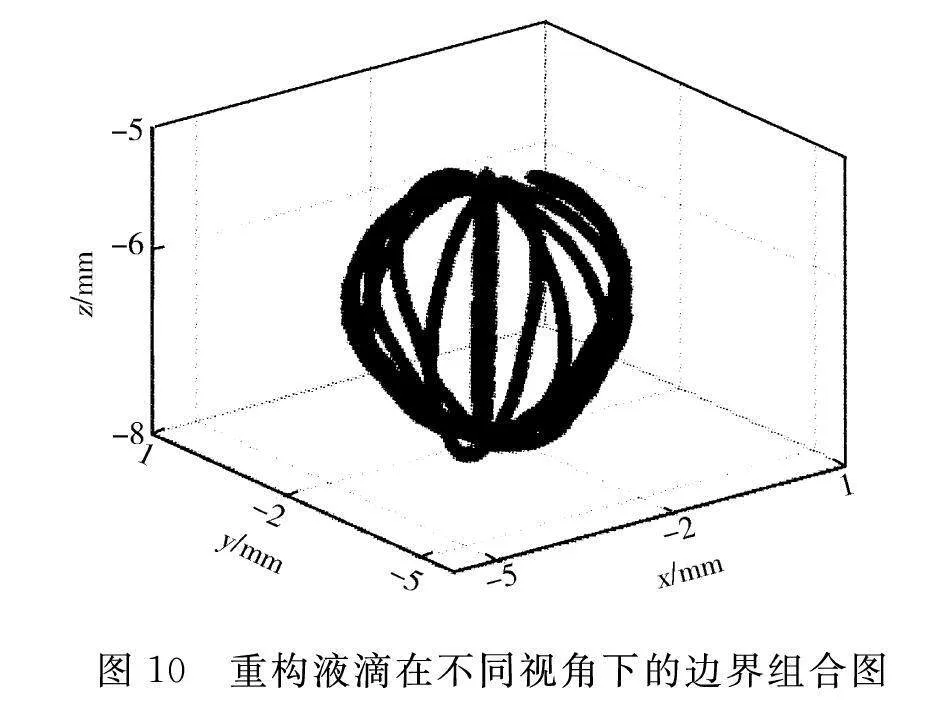
式中:α为表1中的平转角;x3, y3, z3为点P进行第三次变换后的新坐标P3(x3, y3, z3)。经过第三次坐标变换后,7台相机的三维坐标系完全重合,所有的液滴边界三维数据统一到相机标定步骤建立的三维坐标系o-xyz中。由于每台相机均可按照图9的方式处理并获得液滴边界轮廓和空间位置,将这些信息叠加,获得液滴空间轮廓图,如图10所示。该空间轮廓图由7条空间曲线组成,描述了从液滴由不同视角下数字共轴全息图获得的边缘部分空间信息,与单相机全息图相比,图10获得了更加全面的液滴表面信息,并可进一步处理以获得完整液滴结构。
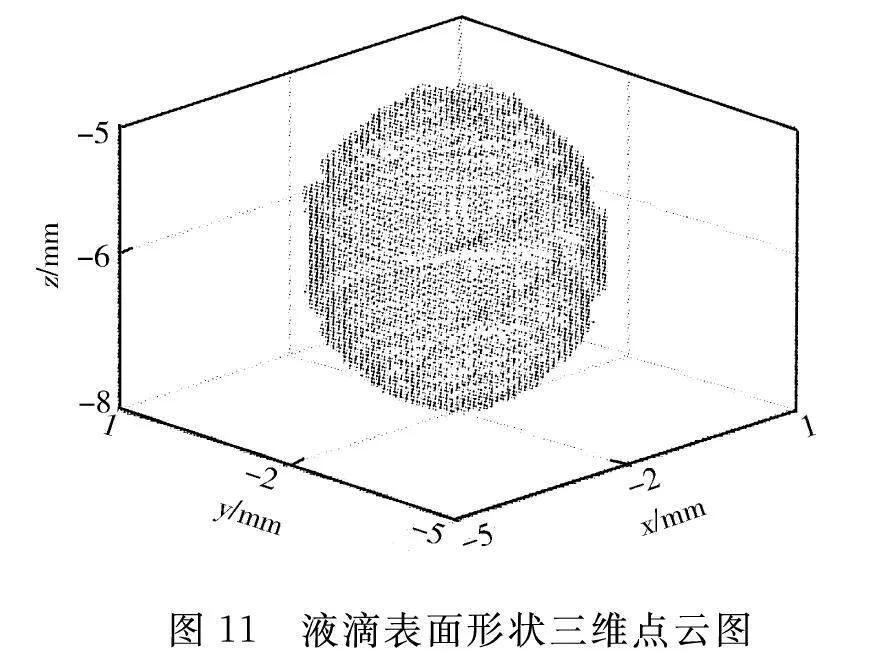
获得液滴在不同视角下的边界组合图后,需要对液滴表面形状的三维信息进行扩充。将获得的三维数据按z轴方向进行分组,将所有z坐标值范围相近(±0.1 mm)的点分为一组。因此在z轴方向上,所有的液滴表面坐标点被分到不同层内,共1 242层。对每一层内的点进行单独运算,所有被分到一层内的点在三维空间内形成的平面与xoy平面平行,在该平面上对该组点进行三维曲线拟合,采用Matlab内置fit函数(使用poly2模型进行拟合)可以得到一条与xoy平面平行的空间曲线,将该曲线在空间内等间距划分,可以得到一组新的三维空间点。只需将划分点的间距减小,即可依靠差值扩充点云中数据的数量,进而扩充液滴表面形状的三维信息。本研究采用较小的曲线划分间距,将该空间曲线等距划分为300个离散点,使点云数据扩充11倍。对所有分组的点进行上述步骤重复操作,可以得到一组空间中的三维点云阵列,如图11所示。
然而,直接采用现在的点云阵列进行表面形状拟合得到的液滴颗粒形貌依然存在一定误差,需要对点云进行修正。
2.2误差修正
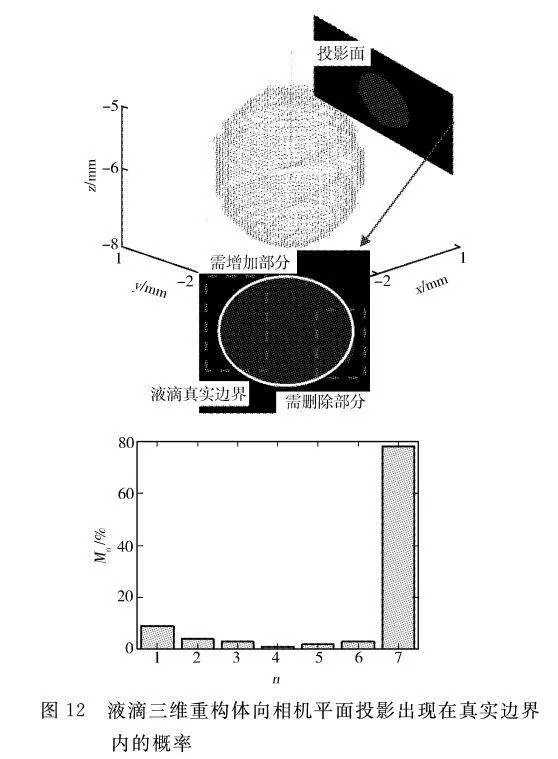
将通过拟合得到的液滴表面形状点云分布向各相机方向进行模拟投影计算,可直观展现三维拟合误差。该计算采用平行光成像模型,直观还原三维物体在空间各方向上投影的位置分布。如图12所示,各相机成像平面位置的模拟投影与真实的液滴边界相比,部分位置存在误差。具体而言,三维液滴的点云模拟投影与该液滴在该方向上拍摄得到的全息图真实二维边界并不完全吻合,某些位置投影面积无法完全填充液滴真实边界内的全部区域,某些位置甚至超出了液滴真实边界,因此,需要对点云拟合结果进行修正,完善真实液滴表面形状。本研究采用与空间雕刻法[15]类似的处理方法。
对于相机1,点云向相机1成像平面方向模拟投影,模拟投影与液滴真实边界存在误差,模拟投影无法完全填充液滴真实边界,且存在模拟投影超出液滴真实边界的情况。为了修正点云模拟投影与液滴真实边界之间的误差,首先按照投影成像关系,在液滴真实边界内部未被点云的二维投影区域填充的像素区域添加额外像素点。具体方法如下:将液滴真实边界包围的像素区域与点云模拟投影所占像素区域进行差集运算,获得差集中所有像素点的坐标,再通过成像投影关系确定这些像素点在三维坐标系o-xyz中对应的所有空间点,最后将这些空间点全部加入点云数据集合。该操作相当于将额外添加的像素点反向投影到三维空间中,生成额外的点云,补充了总体点云信息,这样就确保点云在相机1方向上的模拟投影完全充满液滴真实边界。对相机2至相机7进行上述相同操作,获得扩充的点云信息,扩充后的点云补全了液滴表面缺少的部分,但存在大量超出液滴表面的部分。将扩充后的点云重新向所有7个相机平面方向进行投影计算,根据投影成像原理,点云的模拟投影完全填满了液滴真实边界内部区域,还有一部分模拟投影超出液滴边界。对点云中每个点对7个相机平面的投影点进行观察,统计投影点出现在液滴真实边界线内部的次数n(n=1,2,3,4,5,6,7)。根据真实投影关系可知仅当n=7时,可判定点云中的该点为真实点,而当n≤6时,该点为冗余点,需要去除。根据n的定义方式,可进一步得到点云中某一点的投影点出现在液滴真实边界内次数的概率:
Mn=NnQ×100%。(7)
式中:Nn为投影位于n个方向液滴真实边界内的点云数据点的数量;Q为点云中全部点的数量。统计结果如图12所示。由图12可知,在扩充点云内数据点的数量后,n=7的概率最高,达到79%,表明扩充后点云的主体部分符合液滴的三维形状,而冗余数据点占比为21%。在去除所有n≤6的冗余数据点后,可有效提升拟合精度,由于点云阵列的坐标单位与图像坐标单位不一致,换算过程可能造成点的投影位置出现极微小的偏差,但对最终液滴三维表面拟合结果的影响可忽略不计。
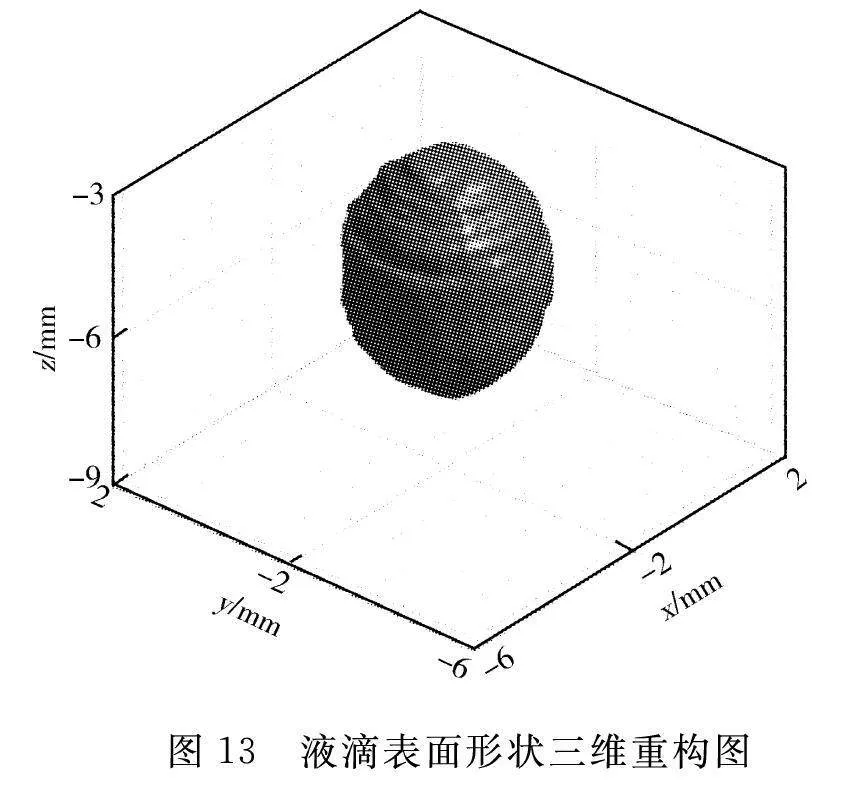
得到修正后的空间点云阵列后,即可重构待测液滴的三维表面形状,在Matlab中使用surface函数对液滴表面三维点云阵列进行处理,可直观展示液滴表面形状三维分布,如图13所示。该形状分布可体现液滴在空间各方向上的形状信息细节,同时消除了对于椭球假设的依赖,有效提高了三维测量的精度。
3结束语
在单光路的数字全息技术的基础上,设计了一种多光路的数字全息三维测量装置,克服了单光路全息三维物体表面形状信息准确度较低的缺点。利用拟合法和修正法相结合的方式,获得了精度较高、拟合效果较好的液滴表面形状三维空间分布。相比于常见的利用空间体积微元进行三维重构的方法,基于数字全息技术的三维重构方法在精度上突破了体积微元尺寸的限制,只与相机成像平面的像素尺寸及系统物像比有关,提升了三维重构的精度。同时,也必须承认该技术目前存在一定缺陷,主要是试验装置较为复杂,需要在开放空间中进行,同时在计算过程中的多次拟合一定程度上影响了计算速度。另外这项技术对于表面有凹陷的物体尚无法进行有效的误差修正。尽管如此,该方法在未来依然拥有较大的发展空间。如果能在全息重构计算时获得更多的关于液滴内部的三维信息,则有可能获得更高效、更准确的液滴表面信息计算结果。
参考文献:
[1]Lau Y M,Deen N G,Kuipers J A M.Development of an image measurement technique for size distribution in dense bubbly flows[J].Chemical Engineering Science,2013,94:20-29.
[2]Sentis M P,Onofri F R,Lamadie F.Bubbles,drops,and solid particles recognition from real or virtual photonic jets reconstructed by digital inline holography[J].Optics letters,2018,43(12):2945-2948.
[3]Minniti M,Ziaee A,Curran D,et al.Femtosecond Digital Holography in the Near-Nozzle Region of a Dodecane Spray[J].Atomization an Sprays,2019,29(3):251-267.
[4]Xiao Y,Wang C,Cao Z,et al.Laser holography measurement and theoretical analysis of a pressure-swirl nozzle spray[J].Advances in Mechanical Engineering,2018,10(12):1-11.
[5]Shao S,Li C,Hong J.A hybrid image processing method for measuring 3D bubble distribution using digital inline holography[J].Chemical Engineering Science,2019,207:929-941.
[6]Deng Z,Wang Z,Li F,et al.Multi-freedom metasurface empowered vectorial holography[J].2022,11(9):1725-1739.
[7]Liu J,Tahara T,Hayasaki Y,et al.Incoherent Digital Holography:A Review[J].Applied sciences,2018,8(1):143.
[8]Coppola G,Ferrara M A.Polarization-Sensitive Digital Holographic Imaging for Characterization of Microscopic Samples:Recent Advances and Perspectives[J].Applied sciences,2020,10(13):4520.
[9]Zhang Y,Poon T,Tsang P W M,et al.Review on Feature Extraction for 3-D Incoherent Image Processing Using Optical Scanning Holography[J].IEEE Transactions on Industrial Informatics,2019,15(11):6146-6154.
[10]Huang J,Cai W,Wu Y,et al.Recent advances and applications of digital holography in multiphase reactive/nonreactive flows: A review[J].Measurement Science and Technology,2022,33(2):022001.
[11]Sanborn D,He R,Feng L,et al.In situ biological particle analyzer based on digital inline holography[J].Biotechnology and bioengineering,2023,120(5):1399-1410.
[12]Hong J,He R,Shao S,et al.Machine learning holography for 3D particle field imaging [J].Optics express,2020,28(3):2987-2999.
[13]Nayer S K,Nakagawa Y.Shape from focus[J].IEEE Transactions on Industrial Informatics,1994,16(8):824-831.
[14]Thelen A,Frey S,Hirsch S,et al.Improvements in Shape-From-Focus for Holographic Reconstructions With Regard to Focus Operators,Neighborhood-Size,and Height Value Interpolation[J].IEEE Transactions on Image Processing A Publication of the IEEE Signal Processing Society,2009,18(1):151-157.
[15]Peng F,Liu,H,Cai W.Combustion diagnostics of metal particles:a review[J].Measurement Science and Technology,2023,34(4):04002.
[16]Fukuda T,Awatsuji Y,Xia P,et al.Review of three-dimensional imaging of dynamic objects by parallel phase-shifting digital holography[J].Optical Engineering,2018,57(6):061613.
[17]Talapatra S,Sullivan J,Katz J,et al.Application of in-situ digital holography in the study of particles,organisms and bubbles within their natural environment[J].Optical Engineering,2012,2(4):8372.
[18]Li X,Chen L,Li Y,et al.Multicolor 3D meta-holography by broadband plasmonic modulation[J].Science advances,2016,2(11):e1601102.
[19]Kannala J,Brandt S S.A generic camera model and calibration method for conventional,wide-angle,and fish-eye lenses[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2006,28(8):1335-1340.
[20]Manuel H,Santoyo F M,Flores M J M,et al.Gabor’s holography: seven decades influencing optics[J].Applied Optics,2022,61(5):225-236.
[21]Gao J,Guildenbecher D R,Engvall L,et al.Refinement of palticle detection by the hybrid method in digital in-line holog-raphy[J].Applied Optics,2014,53(27):130-138.
Three-Dimensional Measurement of Micro-Scale Droplet Surface"Structure Based on Multi-View Digital Holography
ZONG Zijian,WU Yue
(School of Mechanical Engineering,Beijing Institute of Technology,Beijing100081,China)
Abstract: Digital holography is widely used in the three-dimensional structure measurement of micro-scale droplet produced by engine combustion, spray and discharge. However, traditional digital holography only obtains the approximate shape of droplet under the ellipsoidal assumption, and it is difficult to obtain the complete three-dimensional surface shape information. A new multi-angle coaxial holographic system was developed to measure the three-dimensional surface shape of millimeter-level droplets and seven cameras were used to record holograms of droplets synchronously in different directions. Through the coupling of holograms obtained in different directions, a more complete point cloud array on the object surface was obtained, and the accurate surface shape of droplet could hence be calculated. The system could accurately measure the 3D surface shape of droplet in millimeter scale, which had certain application potential in engine internal process diagnosis.
Key words: digital holography;droplet;three-dimensional measurement;error correction
[编辑: 姜晓博]
猜你喜欢
能源研究与信息(2023年1期)2023-06-08 02:20:04
物理学报(2023年5期)2023-03-17 08:31:44
力学学报(2022年2期)2022-03-20 15:52:26
生物工程学报(2020年7期)2020-07-29 12:36:00
高校化学工程学报(2020年2期)2020-06-10 08:53:26
原子能科学技术(2020年1期)2020-03-30 08:39:02
化工进展(2015年3期)2015-11-11 09:18:10
原子能科学技术(2015年1期)2015-03-20 08:19:28
黑龙江科技大学学报(2014年1期)2014-11-08 00:45:54
河南科技(2013年10期)2013-08-12 05:55:10