
基于毫米波雷达的高速路口车辆检测系统
2024-01-01 00:00:00唐文戴强刘军徐江李明宋天宇
西南科技大学学报 2024年3期
关键词:高速公路





摘要:针对实时掌握高速公路路口基本情况的智能化交通管理需要,提出适合检测复杂环境的毫米波雷达车辆检测系统。在电子不停车收费系统道路一侧布置雷达检测系统,对雷达采样信号多次提取处理,实现车辆判别并检测车速。介绍了毫米波雷达车辆检测系统组成、工作流程和应用领域,重点分析了毫米波雷达检测器区分人、车和车辆速度检测的原理及算法流程。根据应用场景布置雷达检测系统进行实际车速及行车方向的判定实验,系统运行平稳、抗干扰能力强、检测精度高,具有较高的实际场景应用价值。
关键词:毫米波雷达 高速公路 车辆判别 车速检测
中图分类号:TN959.5" 文献标志码:A" 文章编号:1671-8755(2024)03-0096-07
High-speed Intersection Vehicle Detection System Based
on Millimeter Wave Radar
TANG Wenwen1, DAI Qiang1, LIU Jun2, XU Jiang3,4, LI Ming1, SONG Tianyu1
(1. Key Laboratory of Testing Technology for Manufacturing Process, Ministry of Education,
Southwest University of Science and Technology, Mianyang 621010, Sichuan, China; 2. National Key
Laboratory of Science and Technology on Communication Anti-interference, University of Electronic
Science and Technology of China, Chengdu 610054, Sichuan, China; 3. Department of Neurosurgery,
Sichuan Provincial People’s Hospital, Chengdu 610072, Sichuan, China; 4. Sichuan Translational
Medicine Research Hospital of Chinese Academy of Sciences, Chengdu 610072, Sichuan, China)
Abstract:" A millimeter wave radar vehicle detection system appropriate for identifying complex environments is proposed for vehicle detection at highway intersections in light of the need for intelligent traffic management to control the fundamental situation of highway intersections in real time. A radar detection system is installed at the side of the road where the Electronic Toll Collection" is. and the radar sample signals are extracted and processed numerous times to discriminate a vehicle and detect vehicle speed. The article provides an overview of the composition, workflow, and application fields for millimeter wave radar vehicle detection, in particular analyzing the operating principle of the millimeter wave radar detector that distinguishes the speed detections of people, cars, and vehicles and the algorithmic process. According to the system application scenario deployment, the actual vehicle speed and driving direction of the judgment experiment show that the system runs smoothly and has strong anti-interference ability, high detection accuracy, and high practical application value.
Keywords:" Millimeter wave radar; Highway; Vehicle discrimination; Vehicle speed detection
高速路口电子不停车收费系统(Electronic toll collection, ETC)的出现,缩减了传统站收费服务所需的时间,缓解了节假日上下高速交通拥堵现象[1]。目前高速路上进行车辆检测主要有视频测速、电磁感应线圈测速以及激光检测等系统[2-5]。高铭阳等[6]研究了使用视频检测方法、运用数字图像处理技术分析车辆驶入及离开摄像头区域的时间,从而得到高速公路车辆行驶的车速等信息,但视频测速检测精度在夜间、雾、霾等条件下易受影响;杨家赫等[7]将电磁感应线圈固定在道路表面,根据磁阻传感器检测车辆经过地球磁场时变化的大小信息及趋势识别车辆信息,但磁阻传感器易受其他磁场干扰导致磁场信息失真,地磁感应线圈的安装与维护也是一大问题;Fu等[8]研究表明可以通过发射多线激光束来感知障碍物的速度等信息,但激光雷达体积大、能耗高、价格昂贵,不适用大规模生产及使用。
毫米波雷达是指工作在毫米波频段的雷达。毫米波(Millimeter wave)是工作波长范围为1~10 mm的电磁波,对应的频率范围为30~300 GHz[9-10]。毫米波雷达运用于ETC路口测速具有体积小、穿透力强、测量精准度高、全天候工作、雨雪等恶劣天气均能正常工作、安装无须破坏道路表面等优势 [11-13]。
陈凌子等[14]研究了毫米波雷达的改进关联准则[15]和矩形跟踪门方法,更新采集信息的相邻点轨迹动态,对车辆信息进行提取,进而实现车辆的目标检测。Cai等[16]提出毫米波雷达与单目视觉融合的检测方法,基于毫米波雷达点云数据和视觉图像信息处理实现车辆信息检测。Zhang等[17]基于空间聚类(DBSCAN)[18]方法对车辆信息进行聚类,通过速度匹配方法自动识别车辆信息,提出基于车联网技术的路侧毫米波雷达标定方法。Li等[19]研究了卡尔曼滤波技术[20]判断目标车辆关联性,提出L型模型确定车辆参数,根据对象簇分割信息量实现车辆检测。笔者在分析已有检测系统的基础上,提出基于毫米波雷达的高速公路检测系统,本检测系统可准确实现人车识别、检测车辆数量、车辆通过ETC道闸的速度、车辆的行驶状态,将高速路口道闸口的实时信息进行反馈,使相关管理部门及时处理高速路口突发情况。
1 毫米波雷达车辆检测系统
1.1 系统组成
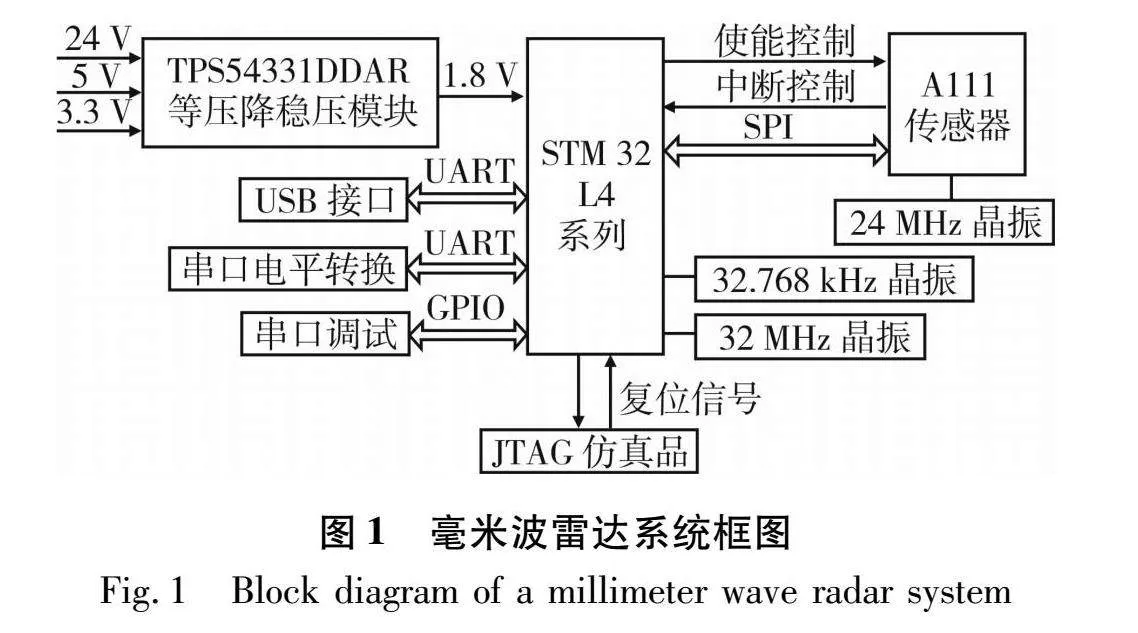
毫米波雷达车辆检测系统主要包括毫米波传感器部分、主控芯片部分以及其他外围电路部分,其组成如图1所示。
电源部分可选择使用24,5,3.3 V多类电源输入,采用TPS54331DDAR等压降芯片为整个系统提供1.8 V稳定电源电压。主芯片部分采用STM32L4系列芯片,内部可集成雷达软件系统(Radar software system, RSS),RSS系统主要进行信号处理和分类等算法及上层应用。外围电路包括晶振电路、复位电路,电平转换电路以及USB接口与UART串口等。
根据STM32L4系列芯片的使用手册设置主控芯片及A111雷达传感器电路图[21]。选用的雷达传感器具有体积小、低功耗、精度高、天线集成于芯片表面等特点,A111芯片开发时外围电路包括ADC模数转换器模块、SPI串行外设接口模块等,外部通信依靠SPI接口与主控芯片建立,A111芯片工作电压为1.8 V,只需要一个晶振及外部供电。
1.2 车辆判别检测原理
A111毫米波雷达传感器区分行人与车辆主要根据雷达发射的雷达信号通过两种不同介电常数的介质时反射率不一样使雷达接收到不同的无线电能量。反射率γ计算如下:
γ=(ε1-ε2ε1+ε2)2(1)
式中ε1,ε2为不同介质的介电常数。
雷达系统根据不同材料在介质中反射率的差异区分不同目标。雷达发射的电磁波遇到高反射率的材料时会以较大强度被反射,使接收的回波信号幅值相应增加,有助于检测目标。在60 GHz介电常数下,金属材料作为优良导体,其介电常数非常小,接近于0,在空气环境中反射率约为1,说明电磁波辐射到金属表面时几乎被全反射。将毫米波雷达布置在道路一侧,对来往车辆与行人进行检测,采集距离传感器不同距离的行人和车辆的信号强度信息,由于行人与车辆在相同距离下雷达发射的信号强度有明显差异,可实现人与车辆识别,为车辆的速度和行驶方向的检测打下基础。
2 毫米波雷达车辆测速系统
2.1 测速系统
车辆测速系统主要由主、副机毫米波雷达系统及上位机组成,通过信号幅度的强度变化与设定的阈值曲线进行比较,从而判定车速。如图2所示,在高速路口一侧间隔一定距离LAB布置A点与B点,分别安装主机检测器和副机检测器。车辆通过高速路口ETC路段时,记车辆与检测器之间的距离为r,主-副机检测器可以实时地将车辆经过的雷达信息发送给上位机,上位机操作系统对接收到的车辆数据信息进行信号处理。相同的车辆在闸道内依次经过检测器A与检测器B, 采集到车辆的侧面信号反
馈信息,记录主、副机检测器感应到车辆整个侧面的信号均值的最大信号强度位置的时刻,分别为t1和t2。主-副机联动式毫米波雷达监测系统可以精确辨别当前检测器前方为车辆,并且检测车辆的行驶方向,通过主-副机毫米波雷达传感器的距离LAB和车辆通过A,B检测器的时间差,可计算出车辆通过高速路口ETC处的速度。
2.2 车辆速度检测原理
毫米波雷达车辆检测器是基于车辆经过检测区时发射的电磁波信号遇到障碍物电磁波发生变化的原理进行车辆检测。本系统的车辆检测基于信号幅度的变化与动态阈值进行比较,当电磁波信号发生变化时,车辆检测器可以实时地将变化情况发送给上位机操作系统,从而判定是否有车辆通过。
目前,在车辆检测器的应用中大多使用静态阈值。采用静态阈值时需预先设定固定不变的阈值,无法适应环境变化,在不同条件下可能会出现漏检或误检,进而影响检测的准确性。本系统车辆检测器使用动态阈值,动态阈值能够根据实际数据调整阈值,更好地处理环境中的噪声和干扰,这意味着系统可以适应不同的天气变化和交通环境,从而具有良好的鲁棒性。设定初始阈值是雷达系统采用动态阈值进行车辆检测的关键步骤之一,采集不同距离点上车辆通过检测器产生的最小信号强度的均值设为初始阈值,为动态阈值的调整提供起点。
车辆通过检测器时,雷达传感器会对车辆侧面连续采集雷达信号,侧面各部位的反射信号形成随时间变化的信号强度曲线,雷达会捕捉一个明显的信号峰值,该峰值来自车辆侧面的平整部位,具有反射强度高且持续时间长的特点。主-副机检测系统同时开启后,某车辆通过检测器系统时在检测器A与检测器B中所产生的随时间变化的雷达信号如图3所示。
单次测量会产生许多雷达信息数据,对数据进行取平均并做相应的信号处理使其便于观测。取A检测器样本平均的最大幅度反射信号的时刻为t1,取B检测器样本平均的最大幅度反射信号的时刻为t2,由此可得车辆进入的时间差为|t1-t2|,车辆通过该检测区域的平均速度通过式(2)计算。
v=LAB|t1-t2|(2)
式中:LAB 表示A,B检测器间距,单位为km;t1,t2分别表示车辆通过A,B检测器的时刻,单位为ms;v表示平均车速,单位为km/h。
3 系统程序设计
3.1 判断车辆
使用A111毫米波雷达提供的Envelope工作模式,起始检测距离0.30 m,检测范围1.00 m,每间隔0.05 m进行一次采样,即[0.30,0.35,0.40… 1.00],兼顾车辆侧面信号较平稳的部位,记录不同间隔距离下反射的回波信号的信息量情况。
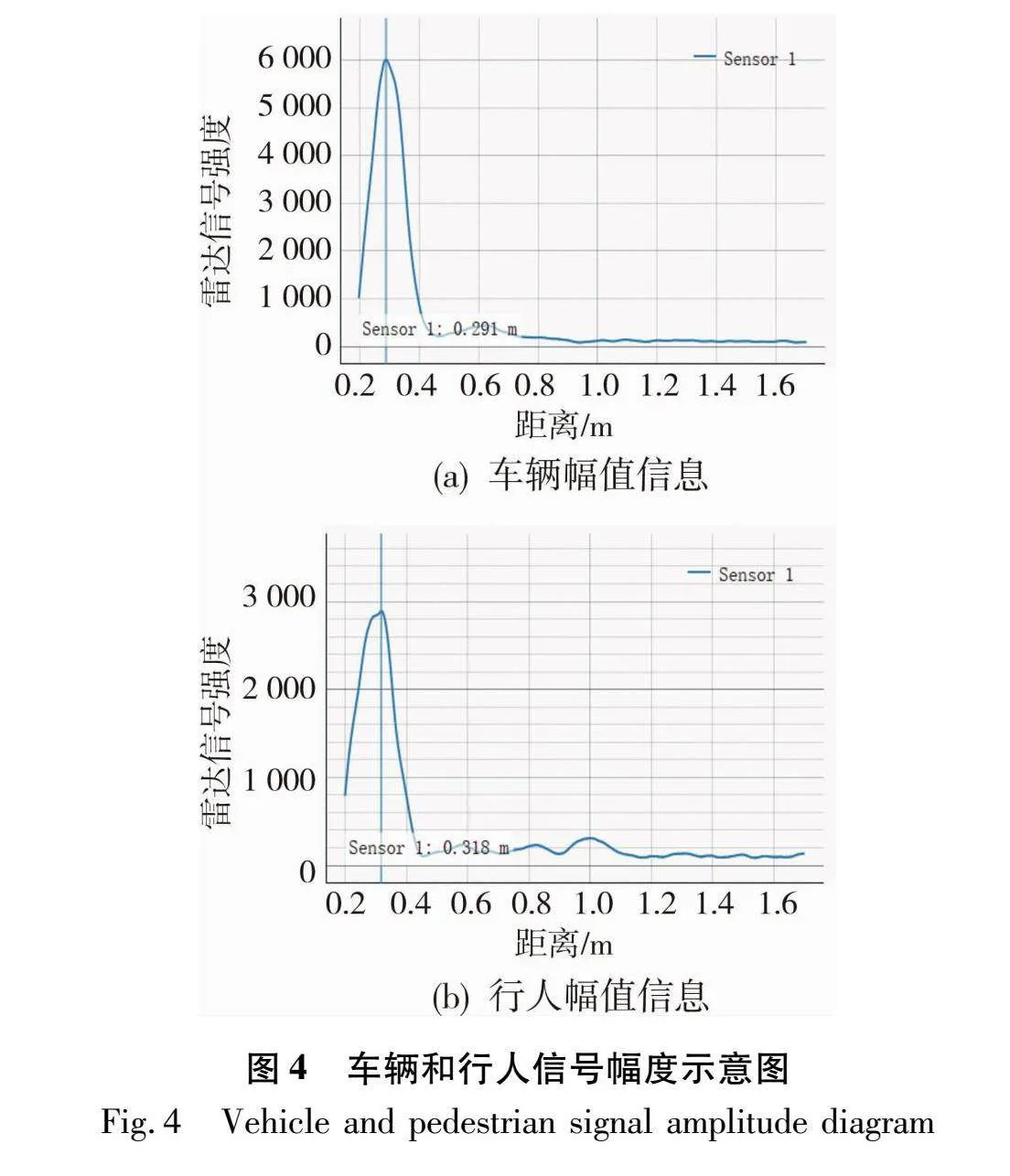
由于金属和人体皮肤或纺织品在空气中的反射率不同,金属明显更优,导致车、人在相同距离的情况下雷达传感器接收到的信息量有明显差异。如图4所示,车辆在距离检测器0.291 m时,幅值信息量约为6 000,而人体在距离检测器0.318 m时,幅值信息量约为2 900。
检测器放于待检测区域一侧,车辆与行人不断经过并离开检测区间,单次测量产生大量的样本数据,根据车辆和人体不同的样本信息特点,判别传感器前方障碍物为行人或车辆,并通过车辆进入、离开检测区域的时间差得到车辆速度。
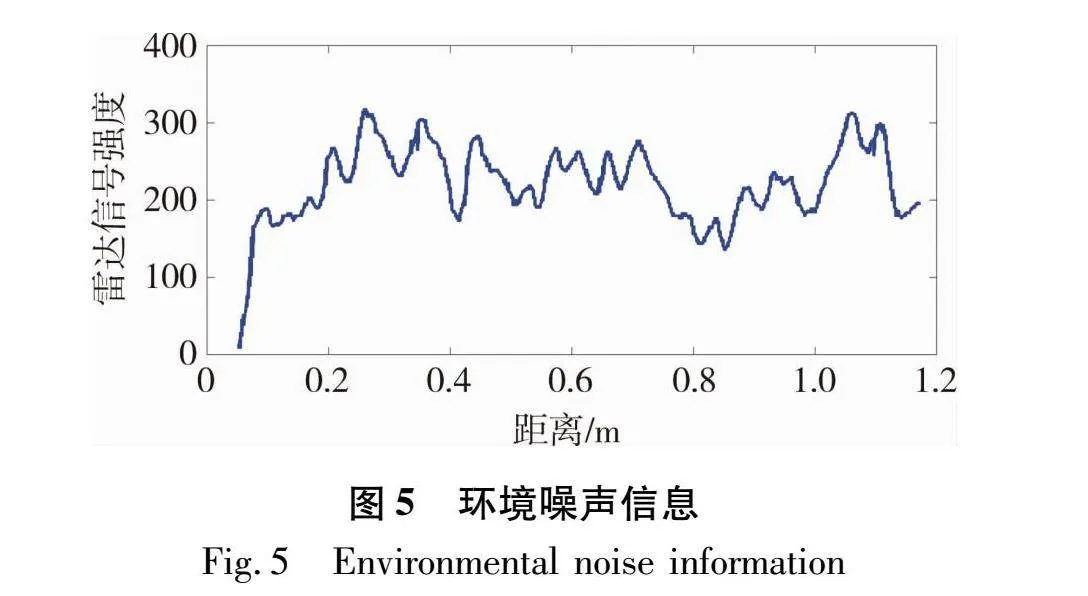
当检测区域没有物体时,反射的回波信号幅值信息受环境噪声的影响不为0,定义环境噪声为environment(r) 函数,在空旷区域测得的环境噪声信息如图5所示。
采集不同距离下车辆和人体反射信号的信息数值如图6所示。图6(a)为检测18辆不同车型的车辆关于距离的离散信息;图6(c)为检测18个行人关于距离的离散信息。
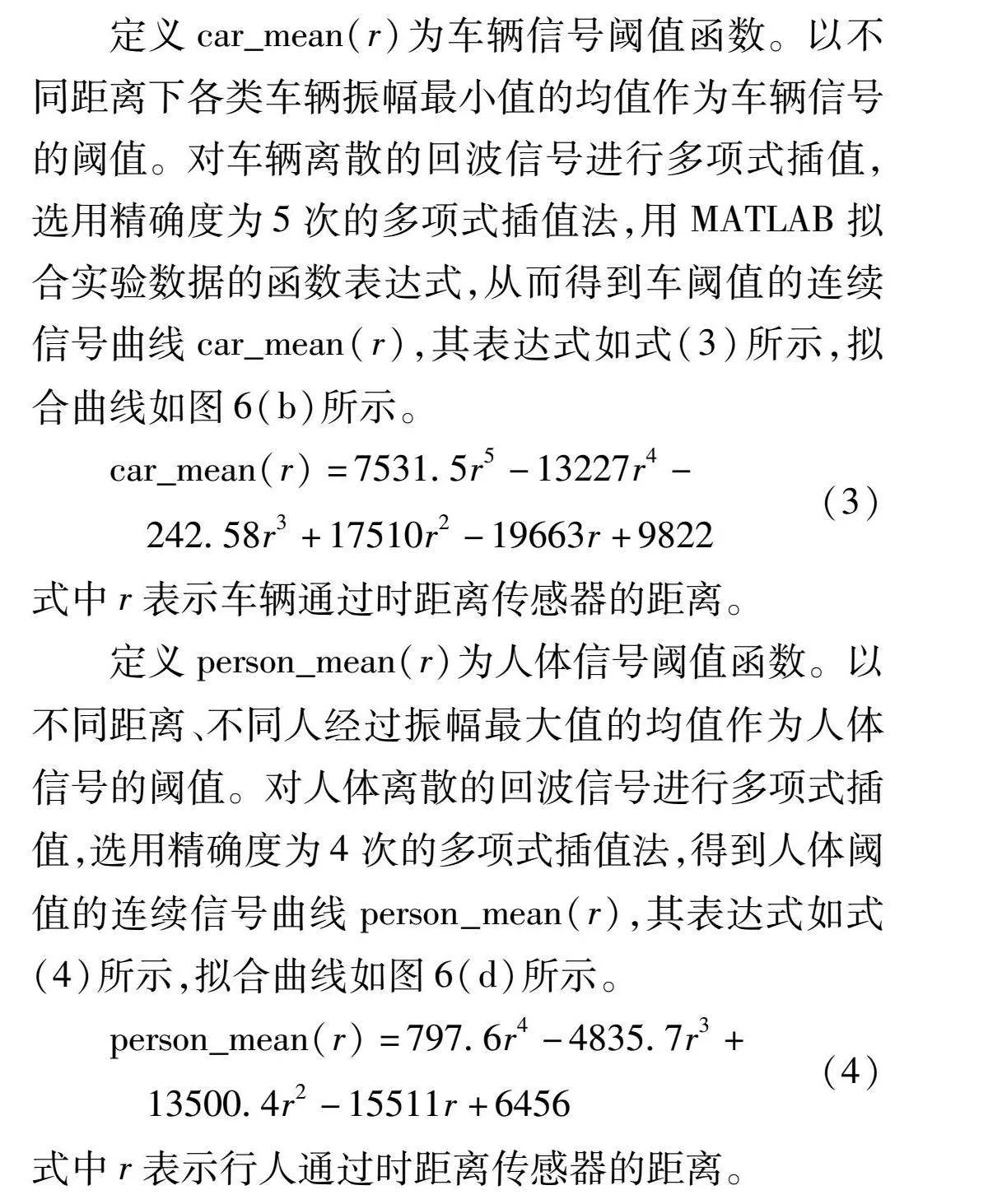
定义car_mean(r)为车辆信号阈值函数。以不同距离下各类车辆振幅最小值的均值作为车辆信号的阈值。对车辆离散的回波信号进行多项式插值,选用精确度为5次的多项式插值法,用MATLAB拟合实验数据的函数表达式,从而得到车阈值的连续信号曲线car_mean(r),其表达式如式(3)所示,拟合曲线如图6(b)所示。
car_mean(r)=7531.5r5-13227r4-
242.58r3+17510r2-19663r+9822(3)
式中r表示车辆通过时距离传感器的距离。
定义person_mean(r)为人体信号阈值函数。以不同距离、不同人经过振幅最大值的均值作为人体信号的阈值。对人体离散的回波信号进行多项式插值,选用精确度为4次的多项式插值法,得到人体阈值的连续信号曲线person_mean(r),其表达式如式(4)所示,拟合曲线如图6(d)所示。
person_mean(r)=797.6r4-4835.7r3+
13500.4r2-15511r+6456(4)
式中r表示行人通过时距离传感器的距离。
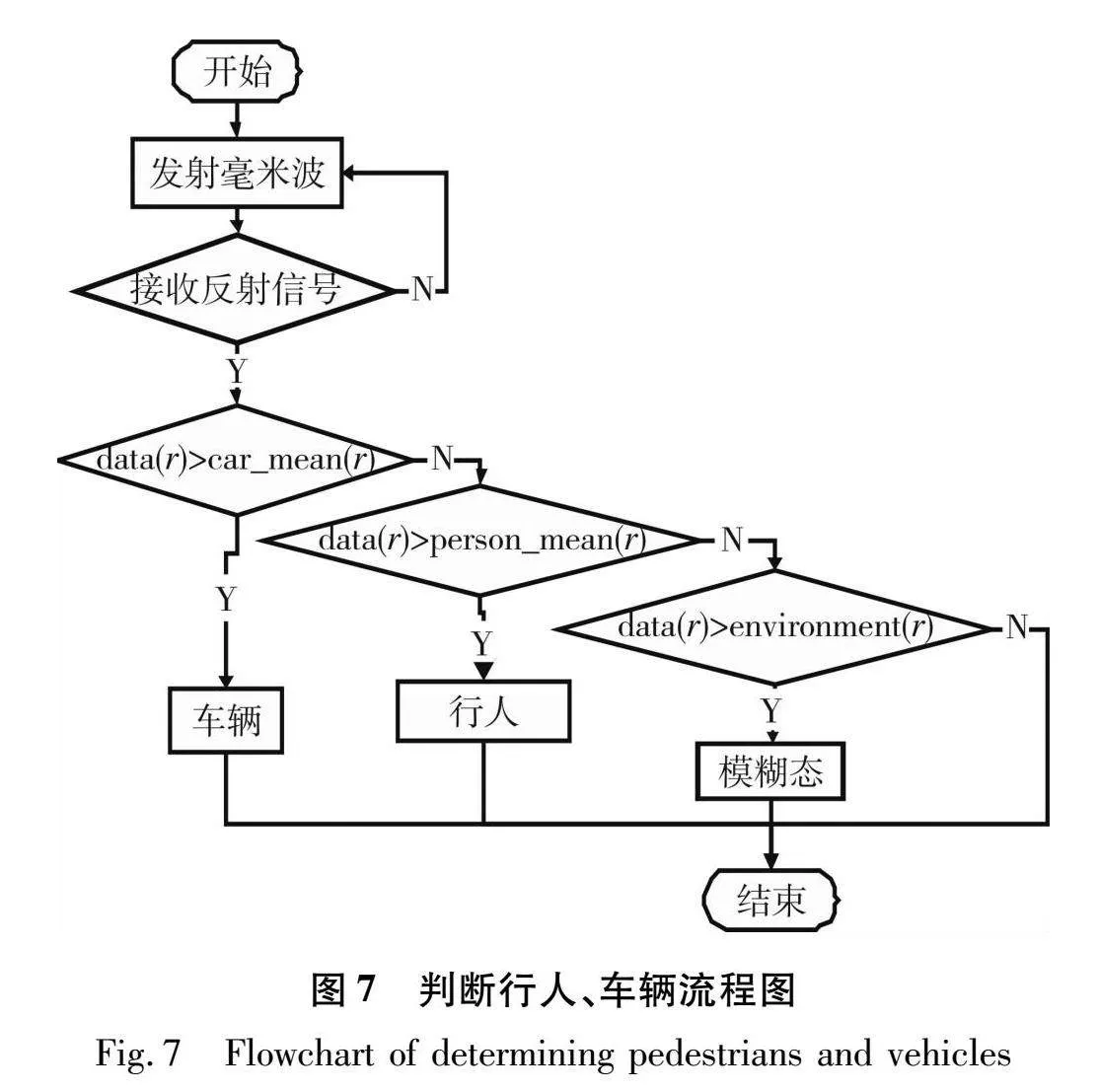
在实际应用中根据当前检测器检测障碍物的数据信息与car_mean(r)和person_mean(r)线性曲线比较,判断传感器当前检测物体是否为车,程序流程图如图7所示。其中模糊态对应距离的幅值介于人、车中间的信号幅值。
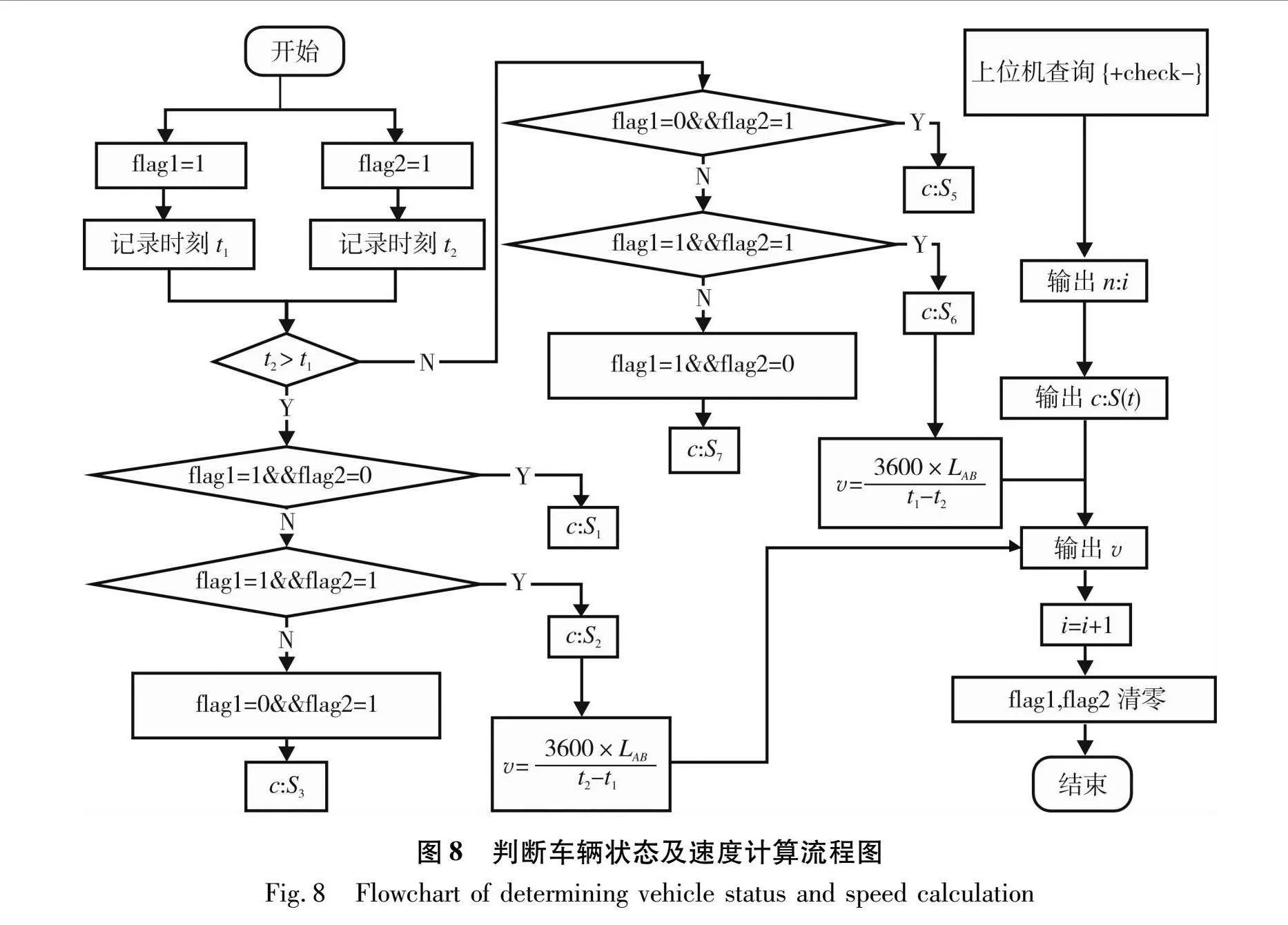
3.2 判断车辆行驶方向和速度计算
主动查询当前车辆交通信息,通过向上位机发送指令{+check-},毫米波雷达检测系统回应信息集合:{n:********,c:*,v:***}。其中,n表示车辆数量;c表示车辆状态;v表示车速。表1为车辆的运行检测状态。
当主机检测器有车经过时,记时刻t1,当副机检测器有车经过时,记时刻t2。检测状态集合{S1,S2,S3}表示主机检测器系统优于副机检测器系统先检测到车辆信息,即t2gt;t1状态下检测信息;状态检测集合{S5,S6,S7}表示副机检测系统优于主机检测系统先检测到车辆信息,即t1gt;t2状态下检测信息。记Sx为t时刻的车辆检测状态。按式(2)计算速度。
算法流程图初始状态为:flag1=0,flag2=0,记为状态“S0”,无车状态。
初始状态上位机发送查询指令:{+check-},反馈信息为:{n:00000000,c:0,v:000}。程序流程图如图8所示。
4 实验验证与分析
4.1 实验验证
在道路旁,将检测器A与检测器B设定间隔距离为5.5 m固定在道路同侧,即LAB=5.5×10-3 km,检测系统的采样频率为30 Hz。
当车辆进入检测区域时,上位机首先显示状态标志位。由正向驶入检测区间,显示flag1=1; 当车辆由反向退出检测区间,flag2=1,并反馈实时信息集合:{n:********,c:*,v:***}。检测器A先感应到车flag1=1,车辆正向行驶,其后检测器B感应到车flag2=1。同理,检测器B先感应到车flag2=1,车辆反向退出检测区域,其后检测器A感应到车flag1=1。
当检测系统正常工作时,有车辆驶入监测区间,上位机显示屏可清晰显示当前车辆行驶至检测区域的车速以及状态。去掉标志位后,当检测器前有车辆经过时上位机只显示实时动态。其中,信息集{n:********,c:*,v:***}中的n表示当前检测的车辆个数,c表示车辆行驶的状态(见表1所示的车辆状态标志位),v表示当前检测的车辆通过检测区间的速度。
4.2 实验分析
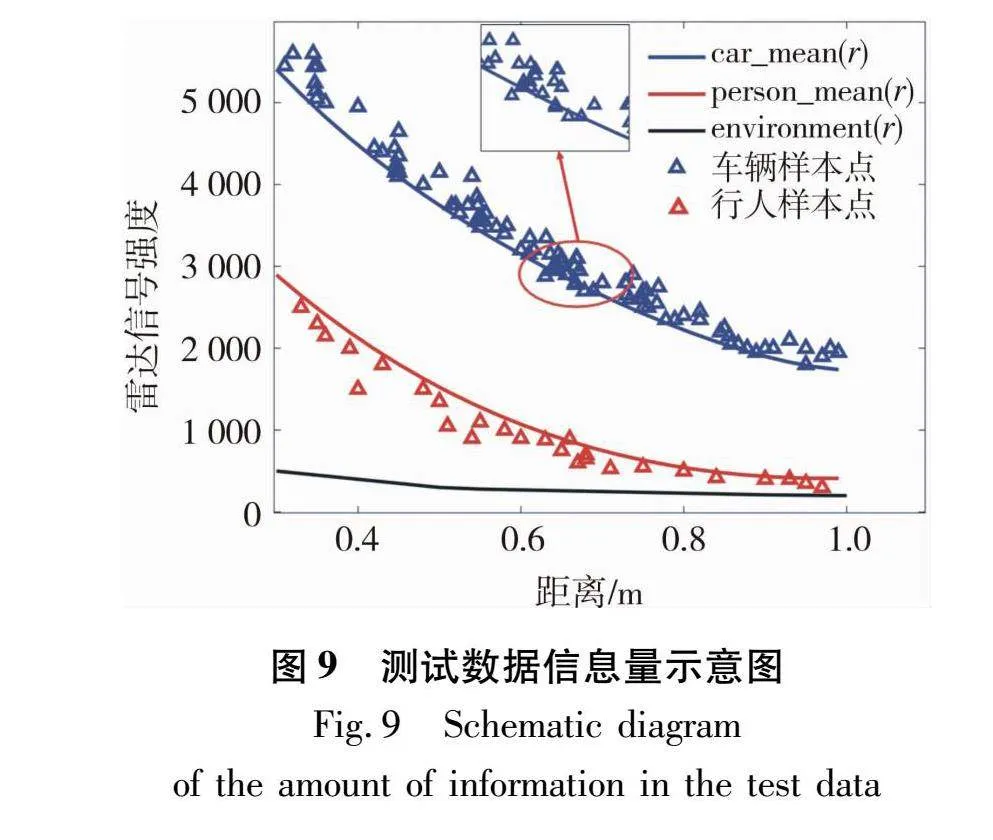
在一定时间段,测试实验记录共131组测试数据。其中,通过车辆数为99辆,行人数量为32人,图9中标记车辆样本点、行人样本点分别为车辆、行人距离检测器的信息值。漏检车辆与行人共4组数据,检测准确率为96.94%。
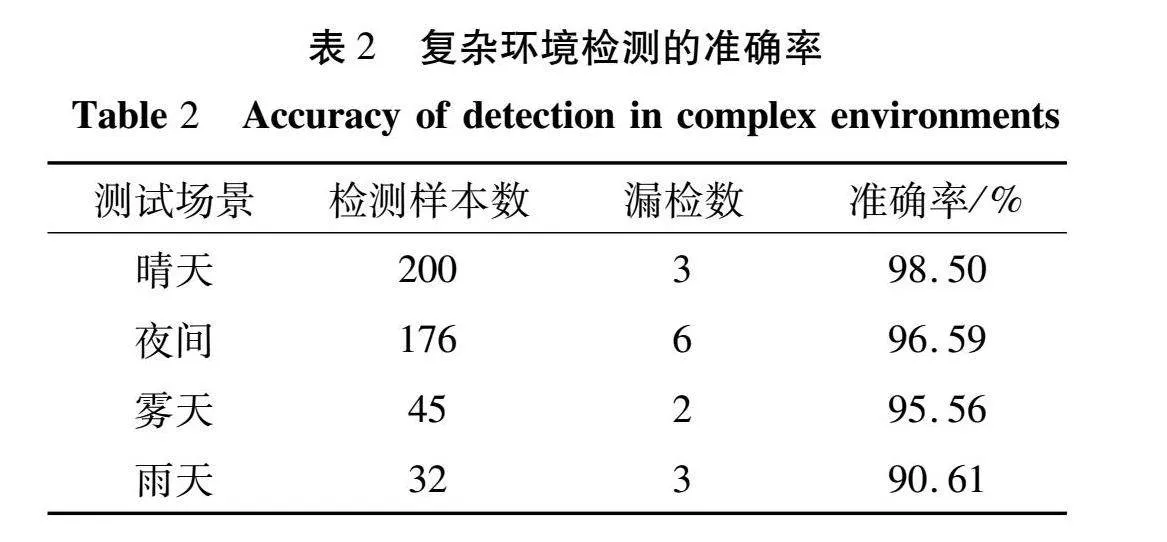
在雨、雾天气及夜间环境检测道路车辆结果如表2所示。
共记录453组数据,根据不同环境检测样本数量及漏检数量分别计算出检测准确率,结果显示此毫米波雷达检测系统在复杂环境的检测准确率在90%以上。
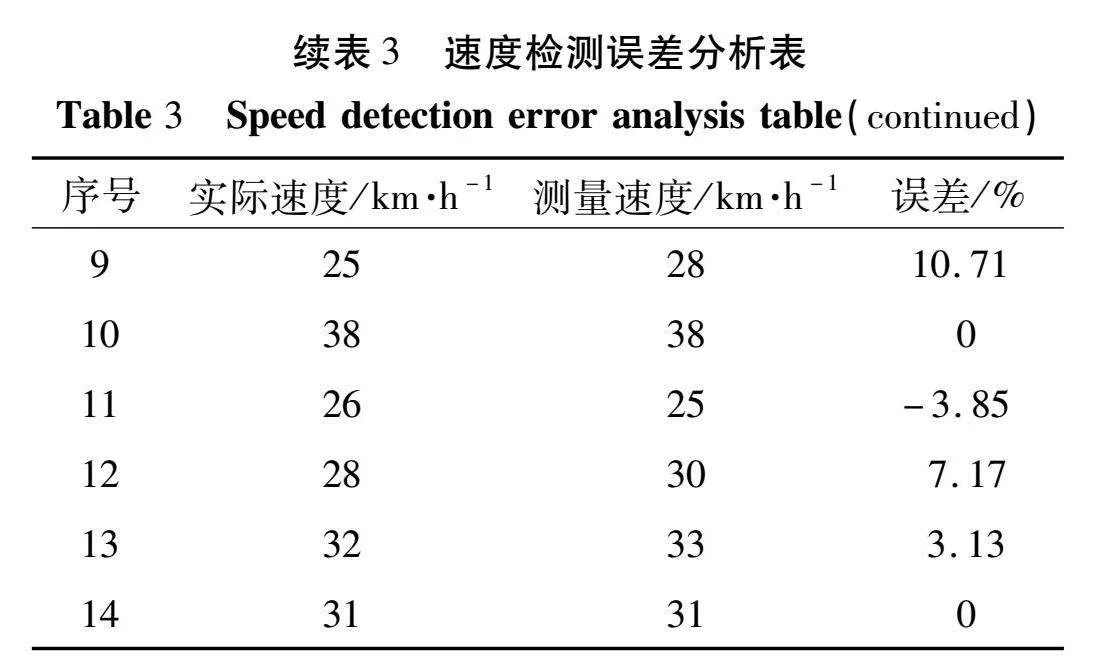
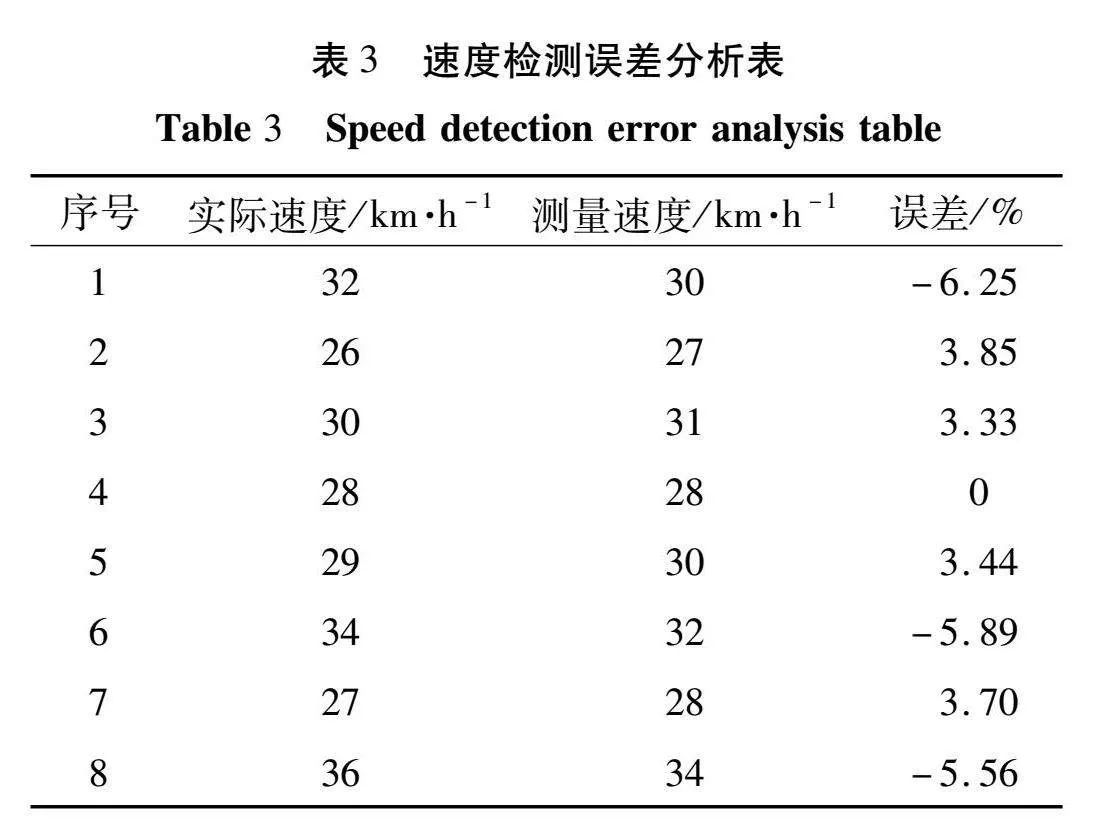
在高速公路ETC路口进行检测实验,实际车速(指车辆仪表盘上显示的车速)、测量车速和误差如表3所示。 14组实验测试结果数据的最大误差为10.71%,误差绝对值的平均值为4.06%。
5 结论
根据高速公路智能交通管理需要,设计了检测复杂环境的毫米波雷达车辆检测系统。(1)通过行人和车辆在相同距离下雷达信号强度的不同,分析行人和车辆的数据集,可实现行人与车辆识别及行驶方向判定,在不同环境下的准确率在90%以上。(2)通过分析不同类型车辆的雷达数据集信号幅度均值的最大值,分别确定车辆通过检测系统的时间点,可实现车速测量,车速测量误差在10.71%以内。(3)该系统在检测车辆和测速方面具有较高的准确性和可靠性,在交通管理中的行人监测和智能交通系统中具有实际应用价值。
参考文献
[1] 詹昌汾. 高速公路ETC联网收费系统现状分析[J]. 公路与汽运, 2022(5): 139-141.
[2] 潘振军. 基于单目视频的车辆测速研究[D]. 成都: 西南交通大学, 2017.
[3] ZHAO P J, LU C X, WANG J N, et al. mID: tracking and identifying people with millimeter wave radar[C]∥2019 15th International Conference on Distributed Computing in Sensor Systems (DCOSS). IEEE, 2019: 33-40.
[4] 高涵, 范学良. 基于地磁信号的车辆位置检测[J]. 传感器与微系统, 2020, 39(7): 130-133.
[5] VASILE I, TUDOR E, SBURLAN I C, et al. Experimental validation of LiDAR sensors used in vehicular applications by using a mobile platform for distance and speed measurements[J]. Sensors, 2021, 21(23): 8147.
[6] 高铭阳, 王风春, 王菲, 等. 基于视频流信息融合的高速公路重点车辆检测与定位方法[J]. 中国交通信息化, 2023 (S1): 255-256,260.
[7] 杨家赫, 周欣鹏, 朱宜昌, 等. 基于电磁感应的新型汽车速度检测装置研制[J]. 物理与工程, 2020, 30(6): 121-126.
[8] FU R, ZHANG M F, WANG C. Behavior analysis of distant vehicles using LIDAR point cloud[J]. Cluster Computing, 2019, 22(S4): 8613-8622.
[9] 李秀生. 基于毫米波雷达和摄像头融合的前行车辆信息识别[D]. 西安: 长安大学, 2020.
[10]丁左武, 徐杰, 周龙, 等. 车载毫米波雷达目标检测综述[J]. 电讯技术, 2024, 64(4): 655-662.
[11]秦汉. 基于视觉和毫米波雷达融合的前方车辆检测算法研究[D]. 长沙: 湖南大学, 2019.
[12]ZHAO Z H, SONG Y Y, CUI F C, et al. Point cloud features-based kernel SVM for human-vehicle classification in millimeter wave radar[J]. IEEE Access, 2020, 8: 26012-26021.
[13]ABDULLAH J, KAMAL M S. Multi-targets detection in a non-homogeneous radar environment using modified CA-CFAR[C]∥2019 IEEE Asia-Pacific Conference on Applied Electromagnetics (APACE). IEEE, 2019: 1-5.
[14]陈凌子, 王华伟, 刘海青,等. FMCW毫米波雷达检测车辆目标跟踪方法[J]. 交通运输研究, 2022, 8(4): 99-109.
[15]朱璟, 彭展. 模糊综合决策航迹关联算法分析与改进[J].计算机工程, 2016, 42(11): 225-232.
[16]CAI G Z, WANG X P, SHI J M, et al. Vehicle detection based on information fusion of mmWave radar and monocular vision[J]. Electronics, 2023, 12(13):2840.
[17]ZHANG C L, WEI J M, DAI J G, et al. A roadside millimeter-wave radar calibration method based on connected vehicle technology[J]. IEEE Intelligent Transportation Systems Magazine, 2023, 15(3): 117-131.
[18]程世超. K-Means及DBSCAN聚类算法的研究与改进[D]. 江西赣州: 江西理工大学, 2021.
[19]LI C, LUO F. A data association method for vehicle detection based on millimeter wave radar[J]. Journal of Physics: Conference Series, 2020, 1544: 012186.
[20]仲腾. 基于卡尔曼滤波的多传感器信息融合的列车定位方法研究[D]. 北京:北京交通大学, 2018.
[21]ACCONEER A B. Radar sensor introduction [EB/OL]. (2020-10-29)[2021-09-29].https:∥acconeer-python-exploration.readthedoce.io/en/latest/sensor_introduction.html.
猜你喜欢
建材发展导向(2021年20期)2021-11-20 05:43:18
鸭绿江(2021年17期)2021-10-13 07:05:32
中国交通信息化(2020年8期)2021-01-26 00:51:18
中国交通信息化(2020年10期)2021-01-14 03:29:50
中国交通信息化(2019年6期)2019-08-23 08:28:40
小学阅读指南·低年级版(2017年11期)2017-12-06 15:14:59
中国交通信息化(2017年3期)2017-06-08 06:09:23
中国交通信息化(2016年9期)2016-06-06 07:42:10
小说月刊(2014年4期)2014-04-23 08:52:20
筑路机械与施工机械化(2014年5期)2014-03-01 02:59:08
