可见光通信中无人机搜寻通信光源的优化方法
2023-12-29 15:57:08王艳菊王湛朗姜淏予
发光学报 2023年12期
肖 华, 王艳菊, 王湛朗, 郭 闯, 姜淏予*
(1. 广东海洋大学 电子与信息工程学院, 广东 湛江 524088;2. 新加坡南洋理工大学 电子与电气工程学院, 新加坡 639798; 3. 湘潭大学 数学与计算科学学院, 湖南 湘潭 411105)
1 引 言
由于无人机(Unmanned aerial vehicle , UAV)具备机动性强、操作便捷、续航时间长、成本可控等多种优势,近年来在目标攻击、天气监视、空中预警、地形侦察等军事领域以及智慧农业、建筑检查、航空摄影等民用领域都得到了快速发展以及广泛应用[1]。在数据采集和性能监控过程中,UAV 与控制器之间的数据传输必不可少。除了微波和射频波之外,近年来,可见光(380~780 nm)已在很多场合作为载波用于数字信号传输。可见光通信(Visible-light communication, VLC)具有绿色环保、节能减排、不受电磁干扰、保密性强、设备简单等优点,有望成为UAV 实现数据相互传输的新途径[2]。
UAV 可见光通信有望成为UAV 在数据采集、绿色通信、保密通信等领域展开应用的关键技术。然而,该新通信模式的可行性很大程度上取决于信号光源以及UAV 携带的光电探测器(Photoelectric detector, PD)之间的空间位置匹配性。在UAV 飞行、信息传送过程中,由于天气、风力变化等因素造成的UAV 抖动和定位不准确,往往会导致光源与PD 的位置不匹配、PD 难以长时间对准光源等问题,最终容易造成信号中断、误码率上升。
为解决光通信效果不理想的问题,研究人员分别从光源调制带宽的提升、光源二次出光设计、优化算法性能提升、均衡技术等不同方面对通信链路进行改良。例如,阿卜杜拉国王科技大学Ooi 课题组[3],南方科技大学孙小卫、王恺课题组以及吉林大学张宇课题组[4-5]等对CdSe/ZnS 量子点、钙钛矿等多种纳米发光材料在可见光通信中的调制带宽做出了分析与计算;华中科技大学罗小兵课题组[6]对用于LED 光源二次出光设计、不同远程荧光粉涂覆结构对出光均匀度分布的影响做了广泛研究,为LED 用于VLC 提供了借鉴;兰州理工大学贾科军课题组[7]针对室内可见光通信提出了自适应比特-功率加载算法,在保证误码率性能时,相比等比特加载方法可节约15%的光功率和30%的电功率;中国科学院陈雄斌课题组[8]通过基于电路设计的预均衡、后均衡、模拟均衡等方法,有效地提高了白光LED 的通信传输速率。此外,复旦大学迟楠课题组[9]对基于RGB LED 以及荧光粉LED 的不同光通信复用技术进行了详细研究。
除上述因素之外,UAV 能否通过可见光实现数据的快速传输,较大程度上取决于UAV 的定位系统。常用的UAV 定位技术包括基于图像识别的视觉定位、全球定位系统(GPS)、基于载波相位差分(RTK)定位、基于超声波传感器的定位和基于气压计的定位等[10-12]。由于UAV 仅能获得与地面的相对高度,图像识别法主要用于二维平面的定位。如表1 所示,GPS 是UAV 常用的定位方法之一,其定位误差约±2 m 范围内,受天气和电磁干扰的影响较大,因此,GPS 的精度无法满足VLC的要求[14]。超声波传感器和气压计一般用于UAV的高度定位,其误差在±0.6 m 范围内,较难满足VLC 的要求[15]。采用RTK 技术可以将垂直定位误差控制在约±5 cm 以内,水平定位误差控制在约±3 cm 以内,然而,由于RTK 设备体积大,费用高,RTK 在UAV 中的应用范围相对较窄[12]。基于当前技术,UAV 难以实现在VLC 中的精确定位,也难以实现通信光源与PD 的长时间对准,这对实现稳定的VLC 数据传输是巨大的挑战。
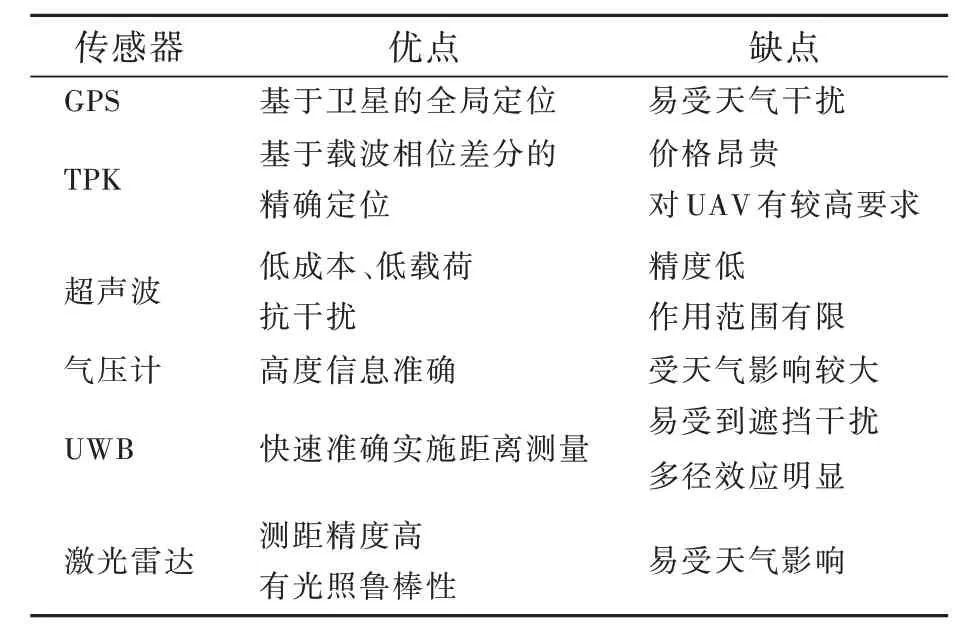
表1 常用无人机定位传感器[13]Tab.1 Conventional positioning senser for UAVs[13]
为了解决定位不准确的问题,Wang 等[16]基于最小全局位置信息共享算法,提出了一种针对低成本固定翼UAV 的精确飞行控制导航控制方法,并采用圆形路径进行数值模拟和实验飞行测试验证该方法的鲁棒性和可靠性。与传统UAV 收集高度重叠的图像、拼接图像以获得正交图像的视觉定位方法不同,Feng 等[17]为了提高定位效率,通过特征检测与匹配、几何变换矩阵计算、图像位置分配和映射等方法提出了一种接近实时的、基于单幅图像的视觉定位方法,为智慧农业提供了新渠道。Muthanna 等[18]为了解决UAV 群在天气不佳条件下的定位问题,提出了将“开展数据采集的UAV 群定位”视为一个多目标优化问题,通过路径规划、Mayfly 优化算法等手段在UAV 通信实现了更高的服务质量、可靠性和节能效率。上述技术在一定程度上提高了UAV 的定位精度,但需要复杂的计算系统,且无法消除定位误差。
为消除定位不准确对UAV 实现光信号传输的影响,本文提出了一种通过规划UAV 路径以规律地扩大、缩小光源搜索范围的方法,使得UAV通过持续感知周边光强来实现准确的通信光源位置搜索。研究综合考虑了通信光源的光分布对搜索成功率、搜索总路程的影响,以及PD 的探测位置、探测接收角对接收光功率、搜索成功率的影响。提出了通过优化搜索路径和光源的出光设计提高光源搜索成功率的解决方案。
2 理 论
理论部分包括本文提出的一种通信光源的搜索方法的实施方法以及UAV 的接收光功率等参数的计算方法。
2.1 通信光源搜索方法
在理想条件下,UAV 在通信前应位于光源下方(A 位置),在完成身份互认后,利用机身上方的PD 接收来自光源的光信号。然而在实际条件下,UAV 由于定位不准确,可能位于B 位置(光源侧面)、C 位置(光源远处)、D 位置(光源上方)等,皆无法感知光源的存在(图1(a))。

图1 (a)UAV 在VLC 中的定位场景示意图;(b)基于等边六边形的通信光源搜索路径示意图;(c)UAV 的搜索流程图。Fig.1 Schematic diagrams of positioning process of UAVs before data transmission in VLC(a), light-source searching path based on the equilateral hexagon(b), and the flow chart of UAV searching(c).
本文提出一种方法,在UAV 检测通信光源失败之后,采用多边形路径进行搜索——先扩大搜索范围,再有序缩小搜索范围以实现光源的搜索。本方法以等边六边形为例,在默认UAV 位于光源下方的某个位置的前提下进行搜索,若搜索不成功再调整搜索策略。根据图1(b)中的路径示意图以及图1(c)中的流程图,本方法具体实施步骤如下:
(1)UAV 携带的PD 对目标波长以外的光波长进行滤除,一旦PD 获取了光源发射的携带光源身份信息的光信号,则可开启身份验证和通信模式;若检测到的目标光信号低于PD 的最低阈值,则开启光源搜寻模式。
(2)UAV 以通信目标定位点为质心,在水平坐标对应的平面上设置边长为ɑm 的等边六角形A1,ɑ的值根据光源强度、无人机定位模块的定位精度来设置;如果该UAV 的定位模块精度较低,ɑ值适当取大一点,以保证该等边六角形A1 范围覆盖光源的光通信范围。
(3)将UAV 定位到等边六边形A1 上的任意一个坐标点后,使UAV 沿等边六角形A1 的其中一个边长飞行,飞行方向可为顺时针或者逆时针。
(4)如果UAV 沿着等边六角形A1 飞行一周后没有探测到通信光源的光强,则在等边六边形A1 六个边长的中点分别取六个坐标点作为等边六边形A2 六个角的坐标。
(5)UAV 的飞行路径维持原飞行方向不变,并就近从等边六边形A1 的某个边长的中点过渡到等边六角形A2,并沿着等边六边形A2 持续飞行。如果UAV 飞行一周后没有探测到通信光源的光强,则再以同样的方法设置等边六边形A3。
(6)如果UAV 在飞行的过程中突然探测到目标光信号光强,则UAV 继续沿着该边飞行,并找到光强最大值Pm1对应的坐标点;在平面内作出一条通过该点并垂直于飞行边长的直线,UAV 在该垂线上找到最强光强Pm2对应的坐标点。
(7)UAV 在垂直坐标轴上找到避障模块限制的最高点位置坐标,并将该坐标位置的光强Pm3定义为UAV 可获取的空间最大光强值Pmax对应的坐标点,该坐标点即为UAV 在空间范围内实现可见光通信需要悬停的坐标点。
采用多边形路径进行光源搜索的方法优点在于可以规律地扩大、缩小搜索范围,搜索效率高。本方法可推广并用于其他形状的搜索路径以展开光源搜索,如四边形、五边形、圆形等。
2.2 UAV 接收光功率计算
图2 为VLC 中的光视距传输链路示意图。LED 到PD 的直接距离定义为d;LED 与PD 接收平面之间的高度为h;LED 发射方向与PD 的距离为l;θ为LED 发射方向与LED-PD 连线的夹角;ϕ为PD 的入射角;FOV 为PD 的视场角,代表接收光的最大角度范围,其大小取决于PD 的封装形式。
令FOV 远大于ϕ,且LED 的光辐射服从朗伯分布条件。朗伯辐射系数m与光源的半功率角()满足下述条件:
如图2 右图所示,LED 的光功率主要分布在范围内。m越大,光的指向性越强,发散角越小;当m=1 时,即在=60°时,LED 的光信号强度下降为垂直出射方向的一半,此时LED 可视为理想的朗伯体,在接收平面实现均匀辐射。在视距链路中单位面积的信号强度P(θ)可以表示为发射角θ的函数:
其中P0为LED 的中心光信号强度。当LED 与PD距离为d时,面积为Ai的PD 的接收信号功率(PR)可计算为[19]:
其中g为透镜和滤光器等的增益,Ai为PD 的有效接收截面。在本文计算中假设g=1,P0=1 W,Ai=10-6m2。由于UAV 在光源搜寻过程中基本保持水平运行,则θ=ϕ。由于,则l与h的比例对PR起到重要作用。假设h=βl,则公式(3)可描述为
当PR达到功率感应阈值(Pth)时,PD 刚好可以检测到光信号,此时的阈值l以及h(lth和hth)可以表示为
以及
根据公式(4),在满足Pth条件下,l与h的关系可表示为
本文以提出的通信光源搜索方法和光源光分布计算方法为理论指导,以Matlab 软件为计算工具,对不同光分布和搜索路径条件下本方法的搜索成功率、总路程等参数的动态变化进行了详细计算及成因分析。
3 结果与讨论
3.1 lth和a 对搜索成功率的影响
为了保证无人机具备一定的搜索范围以及搜索效率,本文将等边六边形的最大个数设置为5,即超过5 次设置等边六边形则默认该次搜索失败,可重新设置搜索条件展开搜索。根据常规雪崩二极管探测器的噪声功率和饱和功率的范围,Pth在计算中设置为10-7W。由于UAV 的搜索成功率很大程度上取决于给定平面内光线的覆盖范围,因此lth作为有效光覆盖半径,对搜索成功率影响非常大。本工作用η描述UAV 的搜索成功率,定义为多次搜索光源的过程中,成功搜索次数除以总搜索次数的商。
图3(a)描述了在光源和UAV 距离2 m 的条件下,选择等边六边形路径, 朗伯辐射系数m为1,总搜索次数为104时,等边六边形边长ɑ在0.1~1.0 m 的条件下,η随lth增加的变化趋势。当ɑ、lth较小时,η随lth的增加呈近似线性增长趋势。随着lth不断增大,η迅速达到最大值1。当η=1 时,即在任意条件下,UAV 一定能感知到光源的位置。对于ɑ较大的情况,如ɑ=1.0 m,η能更快达到极值。产生这种现象的原因是:较高的ɑ可以促进UAV 扩大搜索区域,在相同lth的条件下增加UAV 感知光源的搜索距离和可能性。由于lth的变化并不唯一取决于h,因此图3(a)的结果和UAV 的垂直高度无关。
图3(b)描述了不同lth条件下,η随ɑ的变化特性曲线。在任意lth的条件下,η随ɑ的增加,都呈现先上升后下降的趋势。当lth=0.1 m、ɑ=2.0 m时,η达到最大值0.41,然后逐渐减小。lth变化时,η在不同ɑ条件下的最大值及其对应的ɑ值不同。例如,当lth=0.5 m 时,η的最大值0.83 在ɑ=1.8 m 取得;而当lth=1.0 m 时,η的最大值1.0 在ɑ=1.2 m 取得。值得注意的是,随着lth的增加,η倾向于更早达到极值,并保持在最大值1 一段时间,继而出现接近呈线性趋势下降的现象。该现象的产生是由于搜索路径的覆盖面积和搜索周长增加对搜索成功率产生了双重影响。当ɑ和lth都较大的情况下,UAV 设置的搜索路径可以较早感知到光源,并将光源覆盖范围的一部分包含在路径的搜索总范围之内,从而明显提高η。然而,随着ɑ的增大,搜索覆盖面积和搜索周长越来越大,增大了探测不到通信光源的无效面积,导致η值降低。
3.2 lth和a 对搜索路程的影响
如图4(a)所示,当ɑ一定时,lth的变化会明显改变UAV 的搜索距离(SD)。如图4(a)所示,SD随着lth的增加呈现阶梯状减小的趋势,即lth的增加导致光源有效覆盖面积的扩大可以有效节省搜索距离。根据光源搜索规则,“阶跃”形状的出现是由于lth的小范围增加使得光源有效覆盖面积增加,然而并没有改变UAV 的搜索路线,因此SD保持不变。当lth连续增加时,不同ɑ对应的搜索路径都存在接近0 的最小SD值。SD最小值获得的前提条件是UAV 在搜寻路径的起点即感应到光源。因此,SD的最小值为搜索路径的起点到光源的距离。由于路径范围不同,不同ɑ对应的最小SD值不同。
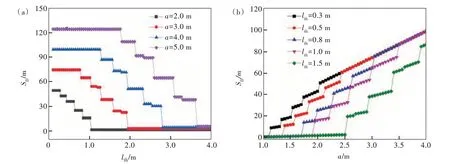
图4 (a)不同ɑ 条件下,SD随lth 增加的变化趋势;(b)不同lth 条件下,SD随ɑ 增加的变化趋势。Fig.4 (a)The variation of SD with the increasing of lth, under different values of ɑ. (b)The variation of SD with the increasing of ɑ, under different values of lth.
如图4(b)所示,在不同lth条件下,边长ɑ的增加导致SD整体呈阶梯式增长趋势。lth较小时取得的SD高于lth较大时取得的SD,说明在光源有效覆盖面积较大时,UAV 可以用较少的时间和路程搜寻到光源位置。与图4(a)不同,图4(b)中SD随ɑ增加时呈现的“阶梯”状具有一定斜率,且随着ɑ的增加,“阶梯”的长度呈增加趋势。该现象产生的原因是:随着ɑ的增加UAV 的搜索总距离增加,导致图4(b)中SD的数值呈现一定斜率下规律地增长。
另外,由于ɑ的持续增长,使得UAV 在搜索过程中需要增加等边六边形的个数来搜寻光源,在增加等边六边形的个数时SD产生了阶跃式的增加,从而导致SD呈“阶梯”状增长。另外,当搜索面积覆盖光源的总面积且ɑ固定时,不同lth条件下的UAV搜索路径不受lth影响,且都是相同的。
3.3 β、lth、hth对接收光功率的影响
作为描述光分布的关键参数,β、lth、hth、PR存在关联关系。当PR大于Pth时,PD 可以检测目标发光波段的光功率; 当PR小于Pth时,即使距离光源很近,PD 也检测不到目标光功率。如图5(a)所示,β的持续增加导致PR呈快速增长、缓慢下降的趋势。该现象出现的原因是:当l一定时,β从0 开始增加使得PD 与光源的夹角θ增大,提高了PR的值,PR一定条件下可以超过Pth;当β继续增加时,PD 与光源的距离h持续增加,PR在h和θ的双重作用下,上升达到最大值后开始下降。在不同l的条件下,PR的最大值都在β=1.3 时获得,即l对PR最大值对应的β没有影响。在相同β的条件下,l的增加导致PR急剧下降。
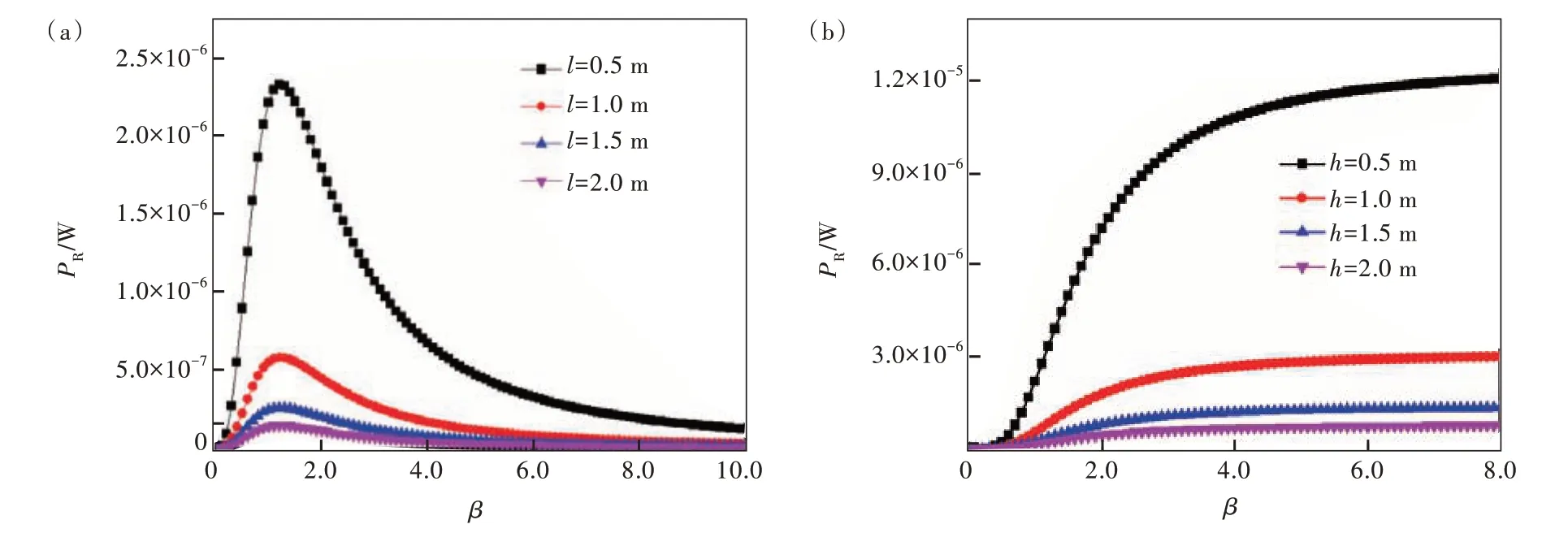
图5 (a)不同l 条件下,PR随β 增加的变化趋势;(b)不同h 条件下,PR随β 增加的变化趋势。Fig.5 (a)The variation of PR with the increasing of β, under different values of l. (b)The variation of PR with the increasing of β, under different values of h.
以l=2 m 为例,PR的最高值可达2.3×10-6W;当l持续增加时,最低的PR值趋于零。与图5(a)不同,图5(b)中选择h作为变量时,PR呈现增加并趋于饱和的趋势。PR趋于饱和可获得的最大值随h的变化而变化。相同β下,随着h的增加,PR值迅速降低。以h=0.5 m 为例,最高的PR可以达到1.2×10-5W,远远高于Pth。当β<0.45 时,PR小于Pth,不满足PD 的探测条件。
当β一定时,PD 的接收光功率PR随接收位置所在的l或h的增加而变化。如图6(a)所示,在β取值一定时,随着l的增大,PR呈减小趋势;l越大,PR减小的趋势越慢,最终趋于零。相比不同β取值下的结果,较高β下获得的PR值较低。这是由于β增加时,PD 相对于光源的夹角减小,但在一定l条件下,h呈增加趋势,降低了PD 的接收光功率。图6(b)中,PR的下降趋势与图6(a)相似。不同的是,相同h条件下,图6(b)中的PR与β成正比。这是由于β较小时,h一定的条件下,β的增加代表l的降低,即PD 更加接近光源发光的中心区域。因此,在该区域,PR随着β的增加而上升。此外,图6(a)、(b)的红色虚线上方的PR值代表高于Pth的接收光功率,其对应的β和l(或h)值可为寻找有效信息传输位置提供借鉴。
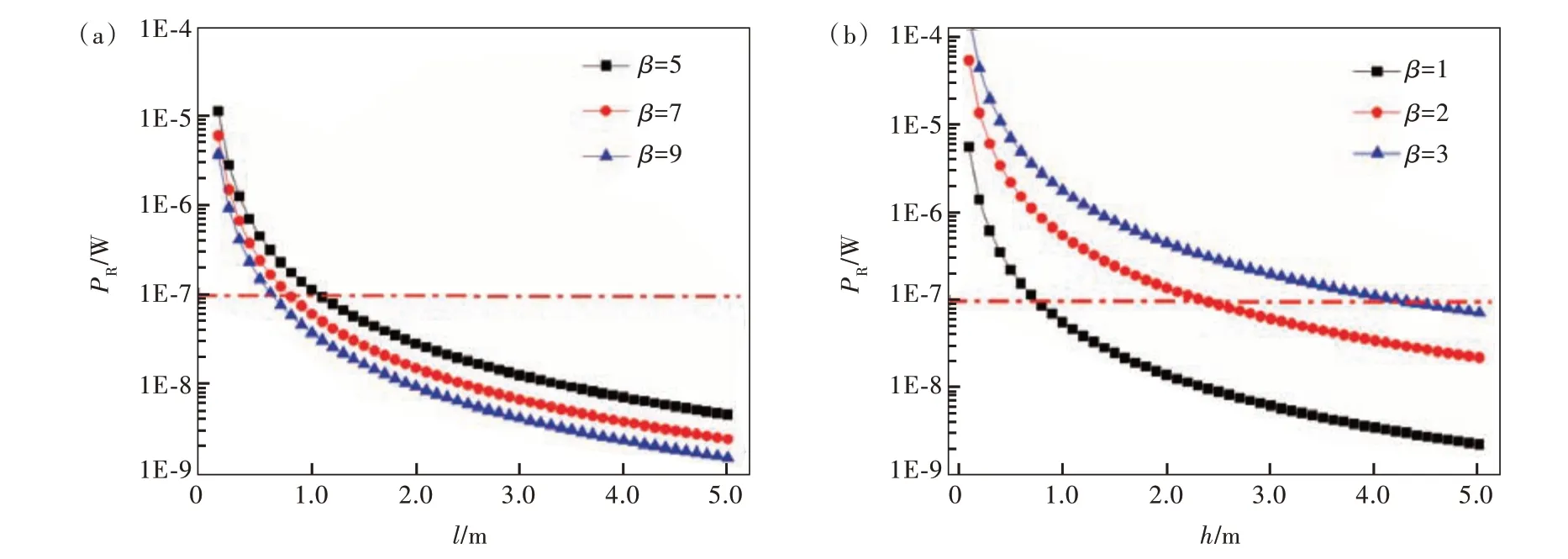
图6 (a)不同β 条件下,PR随l 增加的变化趋势;(b)不同β 条件下,PR随h 增加的变化趋势。Fig.6 (a)The variation of PR with the increasing of l, under different values of β. (b)The variation of PR with the increasing of h, under different values of β.
3.4 Pth一定的条件下UAV的有效三维探测区域
根据公式(7)可获得一定条件下,Pth一定的条件下UAV 的有效三维探测区域。如图7(a)所示,当m=1 时,Pth在三维空间中呈较宽范围的类球形分布,当h增加时,lth呈急剧增宽、缓慢减小的总趋势。该趋势能较好地匹配图5(a)中PR急剧上升、缓慢减小的现象。lth可覆盖的最大范围为0.78 m 左右,对应的高度位置h约为0.95 m。根据图3(a)的研究结果,当lth=0.78 m、ɑ=1.0 m时,UAV 的搜索成功率最高可达0.74。当m增加到5 时,Pth在三维空间中呈两头较尖、中间较宽的类橄榄球形分布(图7(b))。不难看出,m的变化引起的光分布变化会导致通信光源的最大覆盖光斑所在平面的高度位置产生改变,继而影响某一高度条件下UAV 搜寻光源的成功率。因此,不同光照条件下的光斑动态调整对UAV 实现VLC 具有重要作用。

图7 (a)m=1 时Pth的三维分布图;(b)m=5 时Pth的三维分布图。Fig.7 (a)The 3D distribution figure for Pth when m=1. (b)The 3D distribution figure for Pth when m=5.
上述内容分别从光源覆盖范围、UAV 搜索路径等对通信光源的搜索成功率、搜索总路程的影响进行了分析和讨论。此外,光源发光角度、探测角度、PD 与光源的水平距离等都会影响PD 探测所得信号光功率,从而影响光源搜索的成功率。建议根据天气、UAV 的定位精确度、光源本身光分布情况等优化UAV 搜索光源的路径,以提高VLC 中最佳通信位置的搜索效率。
4 结 论
针对UAV 在VLC 中定位精度不满足光通信需求的问题,提出了一种有序扩大、缩小搜索区域,优化搜索路径以感知和寻找通信光源的方法。本文以等边六边形为例设置搜索路径,并对通信光源展开搜索。为了提高搜索成功率,讨论了通信光源的光分布对η、SD的影响,以及PD 的探测位置、探测接收角对PR、η的影响。研究得到了UAV 在探测功率阈值条件下光源所需提供的三维覆盖范围,可用于预估UAV 在不同条件下的搜索成功率。在理想朗伯体条件下,UAV 在光源覆盖半径最大为0.78 m 时,最高搜索成功率可达0.74。虽然采用UAV 实现稳定、快速的可见光通信还有较多问题亟待解决,但本文提出的方法从理论上解决了UAV 定位不准确的问题,大大提高了UAV 在光源下搜索最佳通信位置点的成功率,为UAV 可见光通信的实现提出了解决方案。
本文专家审稿意见及作者回复内容的下载地址:http://cjl. lightpublishing. cn/thesisDetails#10.37188/CJL.20230223.
猜你喜欢
当代水产(2022年6期)2022-06-29 01:12:02
小哥白尼(趣味科学)(2021年6期)2021-11-02 05:23:50
中国生殖健康(2020年8期)2021-01-18 03:05:34
光源与照明(2019年3期)2019-06-15 09:21:04
童话世界(2018年32期)2018-12-03 05:14:56
中国生殖健康(2018年3期)2018-11-06 07:20:12
学生导报·高中版(2017年23期)2017-09-10 07:22:44
学生导报·初中版(2017年23期)2017-09-10 07:22:44
数学小灵通·3-4年级(2017年3期)2017-04-16 04:41:11
海峡姐妹(2015年5期)2015-02-27 15:11:00