基于无人机航拍摄影的变电站运行环境智能巡检方法
2023-12-29 06:25李智强
电气技术与经济 2023年10期
李智强
(广东电网公司佛山供电局)
0 引言
随着我国社会经济的不断增长, 各行各业对电力能源的依赖度愈发高涨, 促使我国电网技术取得高速发展。由于我国幅员辽阔, 为平衡各区域的电能分布, 我国开展一系列跨地区远距离输送电工程, 在这类工程中不同电压等级的变电站发挥着无法取代的重要作用。然而, 在变电站运行过程中, 时常因高压设备故障引起严重的电力事故, 甚至会导致整个电力系统发生瘫痪, 影响变电站的经济与社会效益。所以为保障变电站的安全稳定运行, 开展巡检作业非常重要, 但传统人工巡检方式存在误检、 漏检等问题, 已经无法满足我国智能电网的发展需求。时至今日, 我国学者愈发关注变电站的自动化、 智能化巡检技术,文献[1]中提出一种多机器人协同变电站巡检方法,对大型变电站巡检作业效率低的问题有着明显的改善作用; 文献[2]中设计一种巡检轨道, 让机器人沿轨道进行变电站的自主巡检, 克服变电站巡检困难的问题。在此背景下, 本文设计并研究一种变电站运行环境智能巡检方法, 对提升整个电网运行可靠性具有重要意义。
1 规划无人机巡检路径
本文设计一种基于无人机航拍摄影的变电站巡检方法, 首先需要规划无人机的最优巡检路径[3]。一般来说, 无人机航拍路线的规划是静态规划问题, 也就是需要在变电站运行环境和无人机参数信息均已知的条件下, 规划出一条路径最佳且能安全到达终点的路线。本文为获取最优巡检路径, 引入遗传算法进行路径寻优, 具体流程如下: 首先随机生成遗传算法的初始种群, 把种群中个体当作操作对象, 进行一系列的选择、 变异等操作; 然后分别求出种群中个体的适应度值, 计算公式如下所示:
式中,f[g(x)]min、f[g(x)]max分别表示目标函数g(x) 所对应的适应度函数值;amax、amin分别表示目标函数g(x) 的最大与最小估计值。根据上式评价种群全部个体的适应度, 如果满足结束条件, 说明该个体最优, 如果不满足结束条件, 需要继续对个体进行选择、 变异等操作。最后, 不断循环种群寻优过程, 直至找到最优个体, 也就是最佳的无人机巡检路径, 停止遗传算法寻优流程。此时得到的无人机巡检路径不仅可以对变电站运行环境中所有目标点进行巡检, 并顺利到达指定终点, 而且该路径的距离最短。
2 采集变电站无人机航拍影像
在成功规划出无人机的巡检路径后, 将该路径设定在无人机上, 使其按照设定路线在变电站的运行环境中飞行并拍摄, 采集航拍影像[4]。在利用无人机采集变电站巡检影像时, 主要涉及到无人机航拍影像的平面位置X、 无人机影像在平面介质中的温度场δ、 巡检节点传输控制时间t以及巡检节点的稳定性W(t)这四个因素, 其中X与t为已知条件, 首先根据下式求得无人机影像的温度场δ:
式中,div表示无人机航拍影像的散度算子;ε表示无人机航拍影像的扩散系数矩阵; ∇δ(t,X)表示无人机航拍影像的梯度场。然后根据下式求得无人机巡检节点的稳定性:
式中,γi表示无人机在巡检第i个节点时的能量预算;γij表示无人机在巡检第i个与第j个节点时的总能量预算。基于此, 本文构建的无人机航拍影像采集模型如下式所示:
式中,M表示无人机航拍影像采集模型;C表示无人机航拍影像的映射图层。综上, 本文无人机航拍摄影的四个主要要素设计了无人机航拍影像采集模型, 实现了变电站运行环境巡检影像的自动采集。
3 检测变电站电力故障
从采集的无人机航拍影像中识别出缺陷区域,即进行变电站电力故障的目标检测任务[5]。通常情况下, 无人机采集的变电站巡检影像数量较大,所以传统方法的识别效率较低, 一定程度上影响了变电站巡检速度, 所以本文通过自适应动态阈值分割的方法进行无人机航拍影像的缺陷识别, 首先在航拍影像上为影像的每一个像素点进行动态阈值的赋值, 计算公式如下所示:
式中,Y(i,j) 表示无人机航拍影像像素点的动态阈值;η表示标准差对影像局部噪声的灵敏度;h(i,j) 表示航拍影像的灰度值;σ表示绝对动态阈值, 一般在无人机航拍影像上灰度值较为均匀的区域, 其标准差较小, 所以可以通过调整σ来避免影像上背景环境灰度值对缺陷识别的影响。然后, 对航拍影像的像素点进行高斯加权和运算, 从而实现影像缺陷区域的分割, 表达式如下:
式中,Q(i,j) 表示无人机航拍影像上缺陷区域的像素值;H(i,j) 表示航拍影像上像素点的高斯加权和。根据式 (7) 即可完成变电站无人机航拍影像缺陷区域的分割, 在检测中缺陷区域后, 根据无人机航拍影像与实际物体的对应关系, 即可对变电站电力故障的类型进行判别, 如异物遮挡、 输电线路倒杆、 电力设备破损等, 帮助变电站的作业人员快速检测并确定变电站的电力故障, 以此实现了变电站运行环境智能巡检。
4 实验分析
4.1 实验设定
为保证本文设计的基于无人机航拍摄影的变电站运行环境智能巡检方法是可行且可靠的, 本章将展开对比实验, 将设计方法与文献[1]中和文献[2]中方法进行对比, 并根据对比结果判断设计方法的性能。在本次实验中, 选取某220kⅤ变电站作为实验环境, 在该变电站中划分2*1.5km 的矩形区域作为实验区域, 区域中处于复杂地形下的12 条输电线路作为实验对象。首先采用本文设计方法对这12 条输电线路进行巡检, 无人机航拍的设置参数如表1所示。
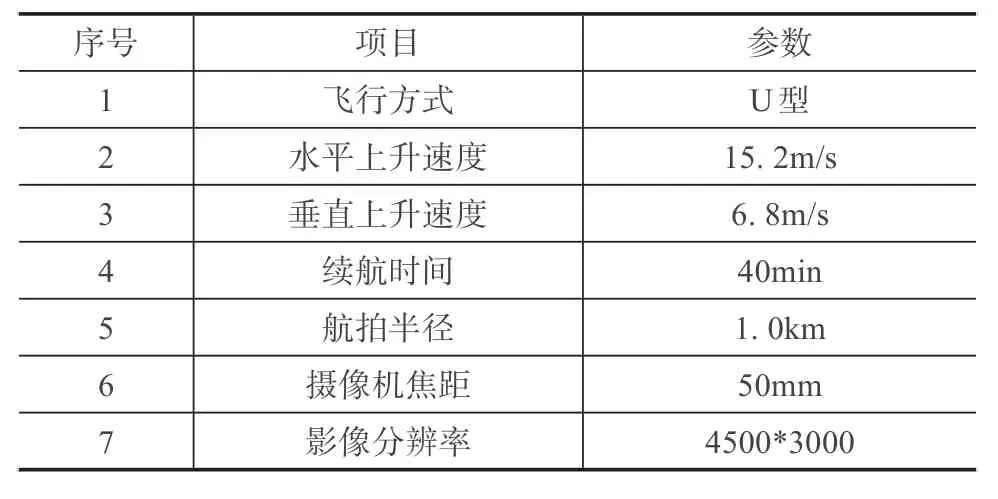
表1 无人机航拍技术参数
控制无人机在与输电线路距离30m 左右的区域进行飞行, 并将无人机的航拍轨迹设定为下图所示的形式:
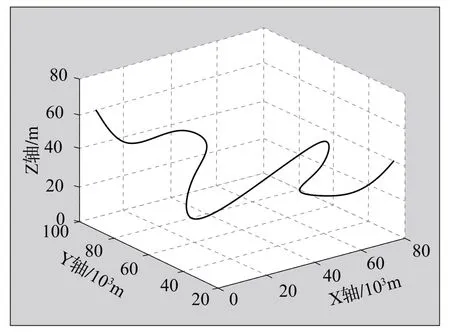
图1 无人机飞行轨迹
同时, 采用文献[1]与文献[2]方法对该变电站的12 条输电线路进行巡检, 分别记录三种巡检方法下的巡检时间, 以此判断不同巡检方法的巡检效率。
4.2 实验结果
根据上述设定, 分别得到三种不同变电站巡检方法相对应的实验结果, 将结果统计为表格的形式, 如下所示:
由表2实验结果可知, 文献[1]中方法的平均巡检时间为38.55s, 文献[2]中方法的平均巡检时间为42.03s, 本文设计方法的平均巡检时间为29.14s, 较文献[1]与文献[2]中方法分别缩短了9.41s、 12.89s。通过比较变电站输电线路的巡检时间发现, 本文设计方法的巡检时间明显短于对照组方法, 该方法充分发挥了无人机航拍摄影的优势, 减小了输电线路所处复杂环境对巡检作业的影响, 所以设计方法巡检效率更高, 更能满足变电站运行环境智能巡检对巡检时间的标准要求。
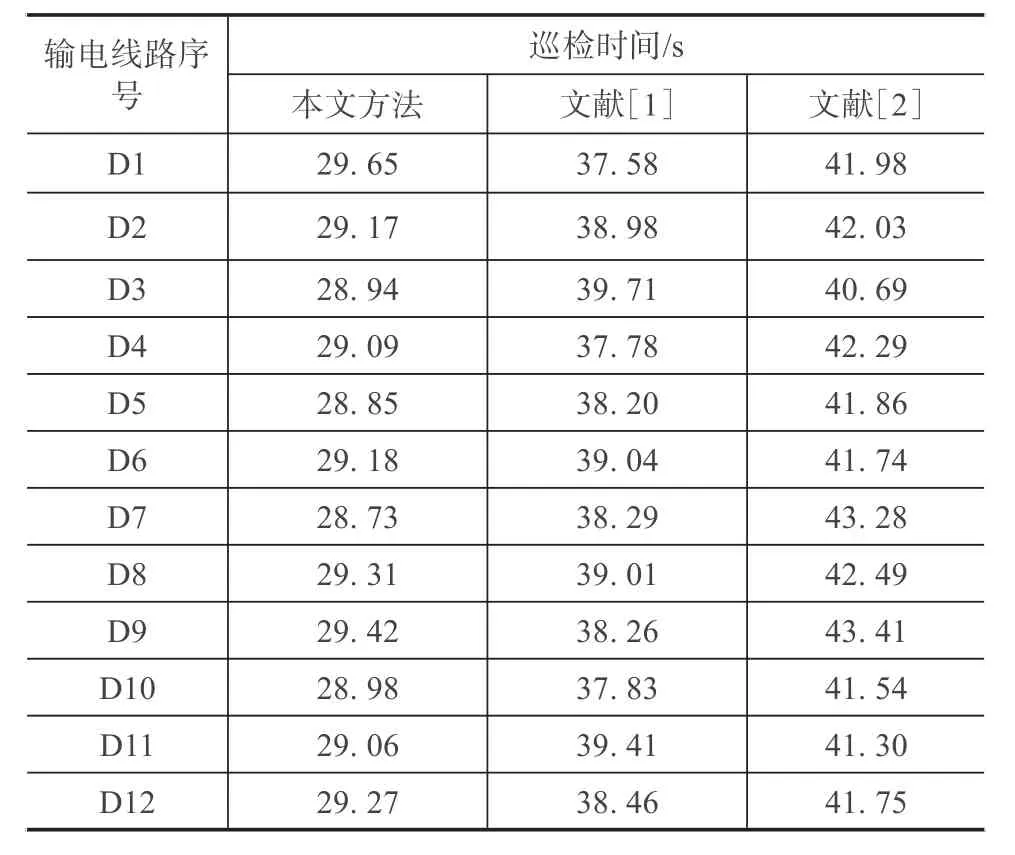
表2 不同方法的巡检效率对比结果
5 结束语
针对传统变电站巡检速度过慢的问题, 本文引入无人机航拍摄影, 设计一种变电站运行环境智能巡检方法, 并通过仿真实验验证了该方法的有效性与正确性。在今后的研究中, 本文将适当扩大设计方法的使用范围, 为促进我国智能电网的健康发展奠定理论基础。
猜你喜欢
速读·下旬(2021年11期)2021-10-12
时代邮刊·下半月(2020年9期)2020-09-23
大东方(2019年12期)2019-10-20
金桥(2018年6期)2018-09-22
电子制作(2018年8期)2018-06-26
小学生优秀作文(低年级)(2018年6期)2018-05-19
科学与财富(2017年22期)2017-09-10
作文通讯·高中版(2017年6期)2017-07-10
电子制作(2017年8期)2017-06-05
商情(2017年1期)2017-03-22