基于北斗定位的电力机器人位移测试实验
2023-12-25 03:09闻予彤李其霖刘飘李颂羽叶思琪王智东
环境技术 2023年11期
闻予彤,李其霖,刘飘,李颂羽,叶思琪,王智东*
(1.华南理工大学电力学院,广州 510000;2.广东电网有限责任公司东莞供电局,东莞 528000)
引言
新型电力系统背景下,传统电力系统朝着更加智能化、数字化的方向发展,更多信息技术应用到电力领域。电力机器人作为其中的新兴力量,正在逐步深化在电力巡检等领域的应用,极大地推动了电网日常运营与维护的便利性。
随着电力机器人的深化应用,尤其电网结构复杂、电磁干扰强、线路经过的地形多样化,甚至工作于电缆沟等地下工作环境。在复杂工作状况下,如果电力机器人的位移出现偏差,不但可能导致电力设备损坏,还有可能导致电力机器人卡住或者倾覆,无法继续执行任务。这就对电力机器人的行经路径记录和位移的准确性和精度提出了更高要求[1]。
随着我国自主研发的北斗卫星定位系统的发展,北斗技术具有的定位精准度高、使用方便、不存在信息安全后门等优点更加突出[2],本论文将利用北斗定位技术,研究电力机器人位移精准性的测试方法。该方法通过接收电力机器人在运行过程中经过关键位置的北斗信息,以电力机器人路径关键点的经纬度为坐标与规划路径对比,可以在运行过程中实时调整电力机器人位移精度,提高电力机器人的位移准确性,避免电力机器人在强电环境中碰到带电物体导致触电,造成自身或者其他设备损毁,也可以避免在地下电缆沟等特殊工作环境中路径受阻,无法继续执行工作任务的情况发生,大大提高了电力机器人的可靠性。
1 北斗技术
北斗技术是我国自主研发的卫星定位系统,能够提供精准的定时和定位功能,不存在信息安全后门以及关键时刻无信号等安全隐患,尤其适合于电力等关乎国计民生的行业,其具有以下明显优势:
1)具备功能强大的卫星定位能力,并以串行异步方式(UART)等经典通信方式提供给设备方便使用,同时提供秒脉冲便于对时。
2)覆盖范围大,不存在通讯盲区。在电网运营范围内,做到全范围服务,在未来会随着电网的发展扩展到更加广大的地区。
3)使用精密授时,可以根据不同需要,采用一级(秒级)、二级(毫秒级)、三级(微秒级)、四级(纳秒级)等不同授时精度,做到时空数据精确计量。
4)具有独有的短报文通信技术,可以在特殊情况下进行紧急通信。
1.1 北斗应用与接口
当前北斗功能多以模块化嵌入到设备中,其结构框图如图1 所示。设备只需要配备天线,便可以接收北斗信号,接收到的信号数据采用通用串行异步方式进行传输,与当前经典的RS485/RS422/RS232 等常见通信接口兼容,方便使用。
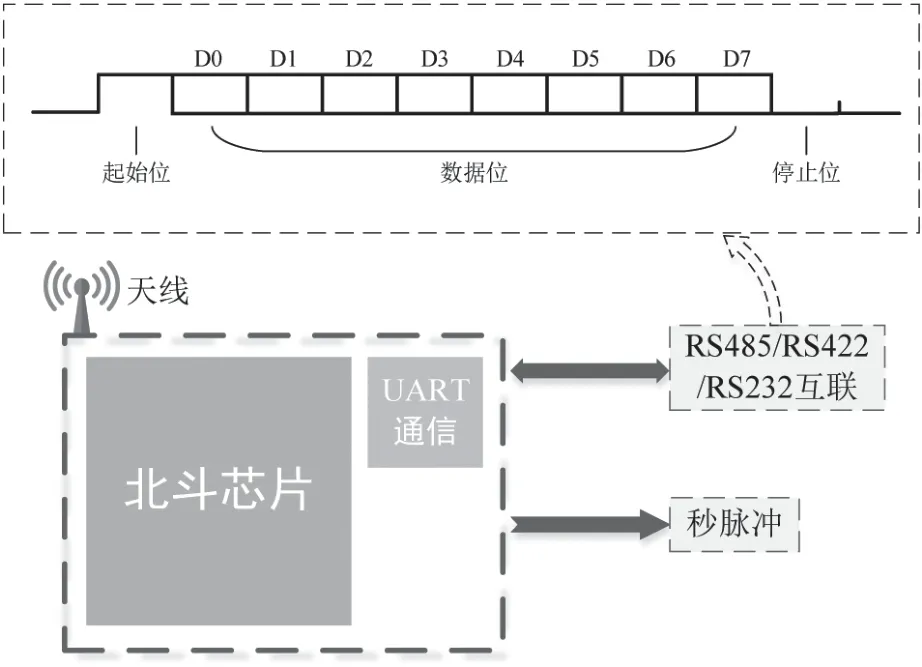
图1 北斗定位模块结构框图

图2 北斗短报文示例
北斗数据传输格式采用波特率不低于4 800 bps,并且发送设备和接收设备应该能够调整一致。[3]北斗数据传输格式如图1 所示,由10 位数据构成。其中第1 位和第10 位分别是起始位与停止位,位于中间的8 位则是以最低有效位在前,最高有效位为零的原则排列的数据位。
1.2 短报文
北斗短报文是北斗信号处理过程中的核心,用于标准所接收到的经纬度等信息。短报文由“$”起始界定符开始,以““回车符””换行符结束,并且最少包含一位字段数。在“$”之后的是格式ID[4],用于识别发送报文格式信息,如北斗信号采用的格式ID 为“GNRMC”,表示后续报文依次为UTC 时间,报文状态,经纬度,方位角,磁偏角与方向等。语句的其余部分可以是若干个数据段,如表1 所示。
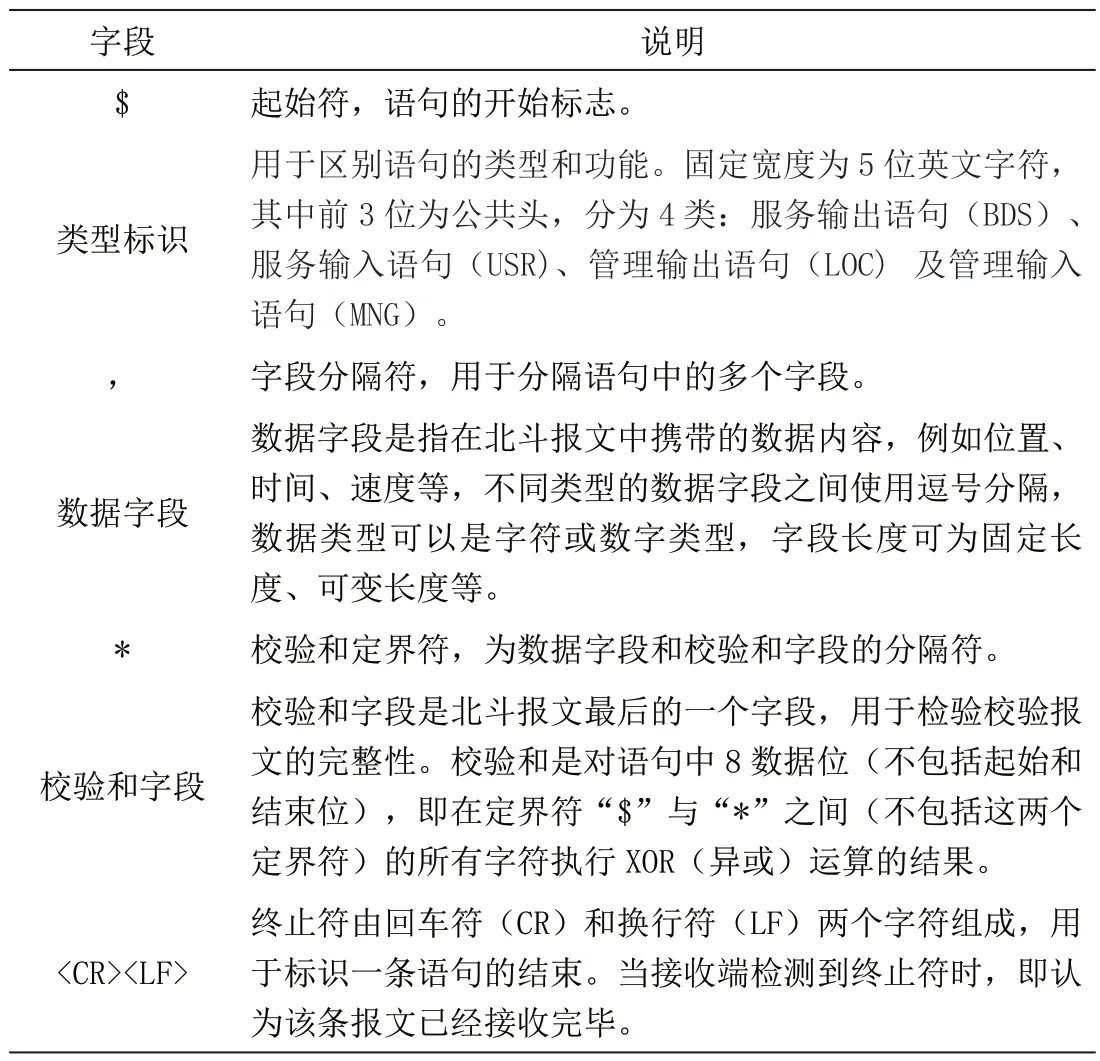
表1 北斗报文语句
接下来以一个原始数据作为例子解读:
“070937”为UTC 世界时间,也就是7 时9 分37 秒,需要注意的是UTC 为世界时间,实际应用时通常需要转换为中国时间,该数值还需加上8 个小时才是中国时间,换算过来也就是15 时9 分37秒;”A”表示定位有效;”2309.52415,N”代表北纬23 ° 9.52415 ′;”11320.35121,E”代表东经113 °20.35121′;”0.315”代表航向角,本实验暂时不需要此数据,可以忽略;”051023”表示23 年10 月5 日。
2 基于北斗的机器人位移测试方法
为了让电力机器人在复杂工况下进行准确、高效的作业,将北斗功能集成到电力机器人,来指导电力机器人精准位移。当电力机器人移动时,电力机器人同时可以接收到北斗信号,并在关键位置输出经纬度等核心信息,记录电力机器人在关键运行轨迹的位置,可以有效分析规划轨迹和实际运行轨迹的偏差。
2.1 物理平台
集成了具备北斗功能的电力机器人将沿着规划路径进行模拟巡线作业,途中在规划路径的关键设置了若干个打卡点,通过在打卡点接收北斗信号的经纬度信息,与预定路径做比较,分析电力机器人位移精度。
当机器人到达打卡点1 附近时,如图3 所示,电力机器人接收记录当前经纬度位置的北斗GNSS 报文。考虑到每次所接收到的北斗报文经纬度会有一定的偏差,本文采用在同一个关键位置多次接收北斗报文的方法。这样一方面避免由于北斗芯片接收到的卫星信号较弱而接收到无效报文,另一方面可以统计同一位置的北斗信号误差,通过数据处理得到更准确的经纬度位置。
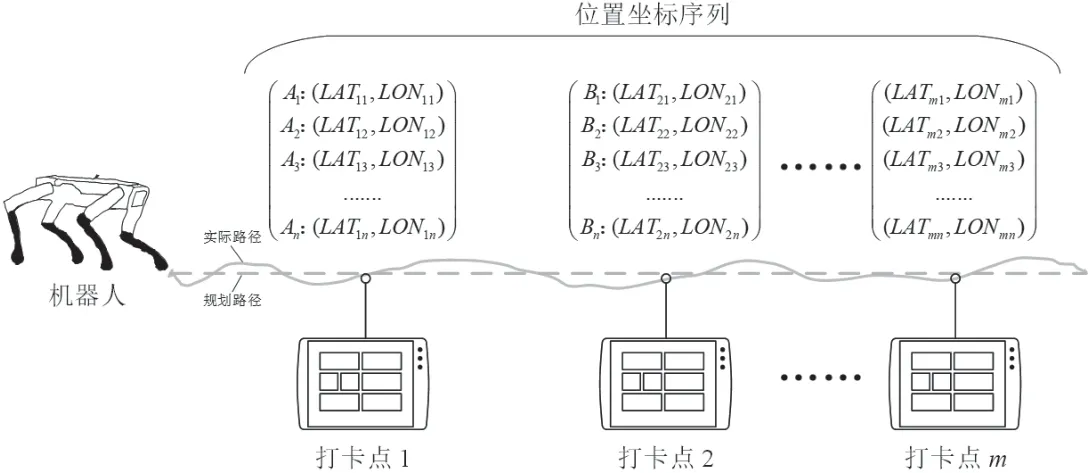
图3 电力机器人位移测试原理图

图4 设备1 数据

图5 设备2 数据
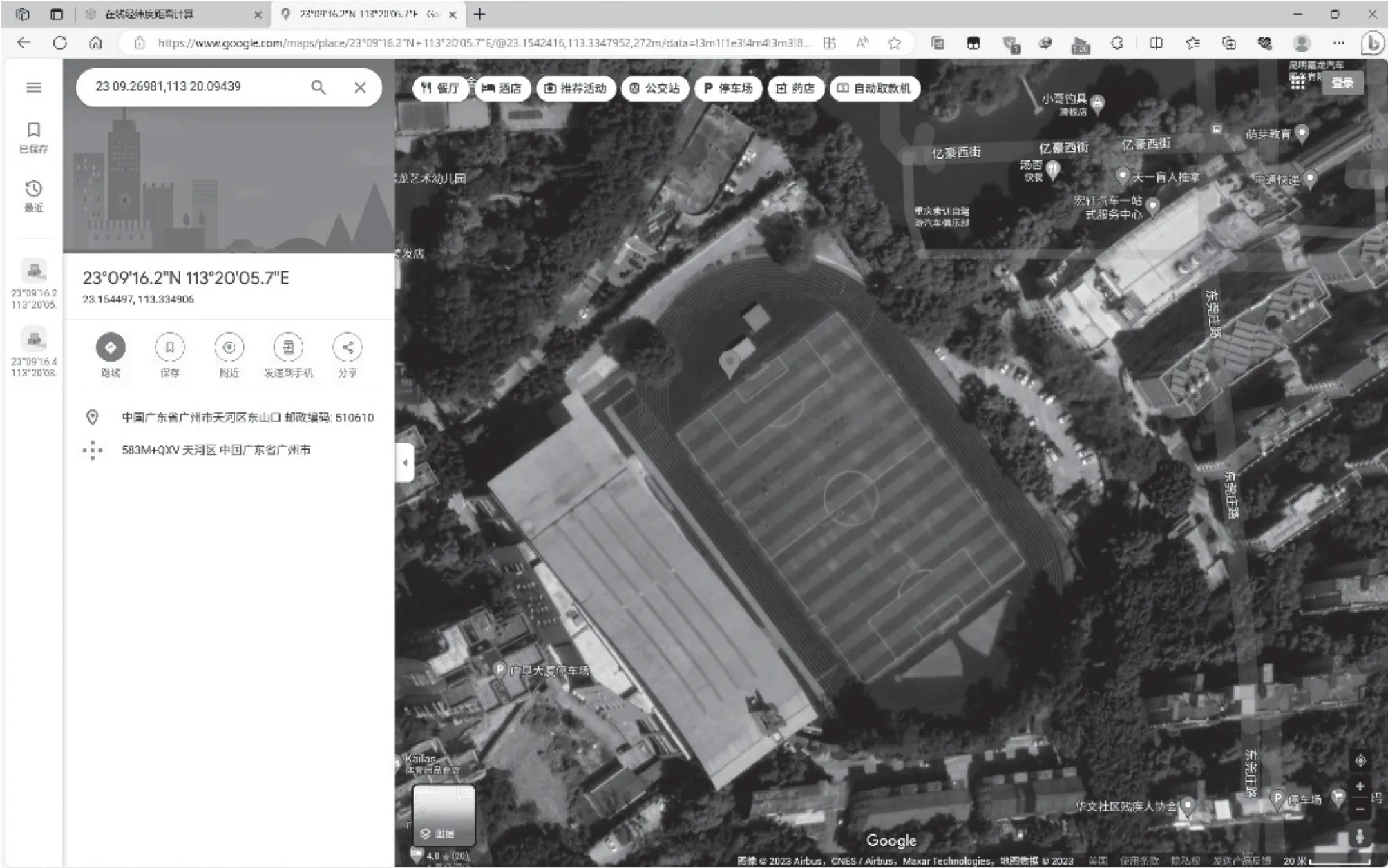
图6 测试位置谷歌地图定位
假设电力机器人到达打卡点1 位置时,接收n 个北斗GNSS 报文,形成对应的经纬度数组(A1、A2……An)。当电力机器人到达打卡点2位置时,记录下打卡点2位置的经纬度(B1,B2……Bn),以此类推。通过电力机器人前行路径所获得的实际经纬度,我们就可以得到电力机器人的实际运动路径,从而计算分析电力机器人实际运动轨迹,并可以定量分析与规划运动轨迹的偏移幅值。并可以进一步对机器人进行实时控制与微调,使得其运动轨迹更加贴合设定路径,达到最好的巡线效果。
2.2 数据处理
电力机器人前行路径关键位置所形成的经纬度数组{A1,A2,A3,……,An},{B1,B2,B3,……,Bn}等,每组经纬度数组数据理论上应该一样,由于北斗卫星自身定位精准度的原因,实际上每组经纬度数组数据可能存在一定偏差,首先进行同一位置的经纬度数组数据清洗,剔除无效数据或是偏差较大的数据,保证同一位置的经纬度数据偏差较小。
2.2.1 数据清洗
考虑到同一位置经纬度数据的随机误差服从正态分布,根据概率统计理论知识[5],误差落在内-σ~+σ 的可能性为68.3 %,误差落在-2σ~+2σ 内的可能性为95.5 %,误差落在-3σ~+3σ 内的可能性为99.7 %,标准误差σ 可以较为合理地估算测量结果的可靠性。
因此,对于电力机器人每个打卡点收集到的经纬度数据,可以分别计算电力机器人所接收到的北斗经纬度数据的平均值μ 和标准差σ:
为了减少同一位置偏差较大的经纬度偏差较大数据,经纬度数组的所有数据代入公式(3),排除所有满足:
的数据xi,其中k 为误差阈值,可取2σ 或3σ。
在将原始数据转换完并且剔除无效数据后,对该组剩余数据求平均值作为该组的代表点,记为(φ1,λ1),(φ2,λ2)。
2.2.2 距离计算
电力机器人前行路径关键位置所形成的经纬度数组通过数据清洗,得到偏差较小的经纬度数据组后,进一步根据所获得的关键位置的经纬度平均值进行地理位置距离计算。
对于电力机器人关键位置的空间地理距离,本文使用Haversine 公式来计算两个经纬度之间的距离,如公式(4)所示,该公式考虑了地球的曲率,比常见的欧几里计算空间地理距离会更准确。
式中:
d—两点之间的距离;
r—地球半径;
φ1、φ2—两个代表点的纬度;
λ1、λ2—两个代表点的经度。
2.2.3 偏差分析
在得到每组数据的代表值和计算出的距离后,可以使用差异分析公式将计算出的距离与实际距离进行比较,以具体量化测量精度。
式中:
Δd—计算距离和实际距离之间的偏差距离;
d计算—通过Haversine 公式计算出的距离,
d实际—实际距离(例如15 m)。
如果偏差较大,则可能需要重新考虑数据清洗策略或检查设备是否存在系统误差。
3 实验测试与分析
为了验证基于北斗定位电力机器人位移测试的精度,电力机器人在实验室进行位移测试实验。将电力机器人规划好前行轨迹,并在前行轨迹的关键点进行打卡,记录当前位置下的北斗报文输出的经纬度,每个打卡位置记录五次北斗信号,以减少误差。
筛选两个打卡点的报文进行数据分析,将报文中有关经纬度的信息提取、翻译,即可得到北斗信号经纬度信息:
打卡点1:{ (23.15454367,113.334293),(23.15454367,113.334293),(23.15454367,113.334293),(23.15454367,113.3342928),(23.15454367,113.3342928) }
打卡点2:{(23.15449683,113.3349065),(23.154497,113.3349065),(23.15449717,113.3349067),(23.15449733,113.3349068),(23.15449733,113.3349068) }
依据式(1)~(2)对上述两个打卡位置的经纬度信息进行有效性判断,得到打卡点数据标准差,该标准差反映了同一位置所接收到的北斗信号“抖动”偏差:
位置1 抖动偏差:(0.00000009,0.00000001 );
位置2 抖动偏差:(0.00000017,0.00000022 )
经纬度抖动偏差均小于(0.0001,0.0001),说明北斗信号自身的经纬度精度较好。
下一步进一步计算设备1 和2 关键位置之间的距离偏差,将关键位置经纬度数组的每组五个数据通过计算平均值的方式,得到为一个便于分析的实际路径的代表坐标,代入式(1)得到打卡点坐标平均值,该平均值反映了设备1 和2 的代表坐标,分别得到位置1 和2 的平均经纬度坐标。
位置1:(23.15454367,113.33429293)
位置2:(23.15449713,113.3349067)
将代表坐标代入式(4),求得两位置通过北斗定位得出的实验计算距离:
d= 62.963 686 75 m
已知所规划的两打卡点实际距离d实际=64 m,将计算距离与实际距离代入式(5)得到实验误差:
△d= 1.036 313 25 m
从上面分析可以知道,对于64 m 远的实际距离,通过北斗经纬度信息获得的实验误差约为1 m,满足精度要求。
5 结论
本文所提出的基于北斗定位技术的电力机器人位移测试方法,为电力机器人在高精度、高可靠性方面的运行提供了坚实的科技保障。这一创新的测试方法不仅解决了传统方法存在的各种问题,更以其兼具时空定位能力的独特优势,展示了电力机器人在未来电网运营中的巨大潜力。
猜你喜欢
军事文摘(2023年20期)2023-10-31
汽车电器(2022年9期)2022-11-07
小哥白尼(神奇星球)(2022年3期)2022-06-06
铁道通信信号(2020年4期)2020-09-21
当代陕西(2019年18期)2019-10-17
中国外汇(2019年11期)2019-08-27
科技资讯(2018年10期)2018-10-26
新课程·中旬(2017年1期)2017-03-27
环球时报(2016-08-01)2016-08-01
太空探索(2016年3期)2016-07-12