农村不动产测绘中地面三维激光扫描技术的应用
2023-12-22 04:12卢欣
智能建筑与智慧城市 2023年12期
卢欣
(黑龙江省第五地质勘查院)
1 引言
房地产的权属测绘为房地产的统一登记和普查工作奠定了基础[1]。不动产权籍测量工作量大,测量精度高,野外劳动强度大,测量环境复杂,测量要素复杂,工期紧,技术人员和仪器设备的投资大[2]。当前使用最多的是全站仪和GPS-RTK 联合测权法[3]。尽管这种方法已经基本达到了普查的基本需求,但是各个地区所取得的结果并不一致,单凭一种方式进行全国房地产普查,无论从进度、数据精度、人力、物力、近期建设和长期发展来说,都是不够的[4]。
2 三维激光扫描测量关键技术
2.1 三维激光扫描测量原理
三维激光扫描技术是一种不需要使用三棱镜进行地面目标空间定位的快速检测技术。目前,这种测试方法在复杂环境和恶劣环境下得到了广泛地使用。除定位方式的差异之外,所有的扫描体系都具有基本的基本原则。首先,采用GPS 在该体系中的精密导航系统,采用IMU进行初配,得到了该载体的准确坐标及姿势;利用激光脉冲对目标进行激光辐射,利用激光脉冲的方式将其折射,并将其吸收,得到与该激光扫描仪之间的夹角、间距,并用该记录仪进行记录,而该扫描仪中的GNSS与IMU协同工作,将其转化为可以进行直接识别的数据。采用激光脉冲对靶材进行持续地扫描,并对其进行数据融合,最终获得准确的3D 点云资料。通过对点云资料的内部加工,得到了对象的立体建模。该系统的工作原理是:先对地面进行扫描,获得地面点云资料,并获得其三维空间的坐标,再进行地面信息的采集和三维模型的建立。
2.2 三维激光扫描测量关键技术分析
三维激光扫描技术的兴起和发展,为获得三维立体信息和数据采集技术的发展奠定了基础。三维激光扫描仪解决了常规点云技术的不足,它的核心技术是将各种位置模式整合到现场数据的获取中,利用点云的准确匹配技术对其进行内部的数据进行加工,从而建立高精度的三维点云模型。
2.2.1 融合定位
三维激光扫描系统既能克服常规的单一位置测量技术的缺陷,又能有效地实现各种位置信息的集成,从而有效地解决了各种情况下的卫星图像强度问题。三维激光扫描仪GNSS,IMU 的位置系统,具有SLAM 等多种技术。融合定位技术的核心是室内、户外的持续定位,而常规的单一定位方式,例如:GNSS定位、IMU惯性导航、SLAM定位等,都无法做到长时间定位。为了克服在各种环境条件下,定位精度高、长时间定位的难题,提出了一种基于图像的融合定位方法。
2.2.2 点云配准
点云匹配是点云数据处理的首要步骤,也是实现点云建模准确率的重要步骤。对大量数据进行多视角的收集是三维激光扫描测量的核心技术。由于其覆盖的面积大、地形因素多、地形条件多,因此,在每一次的扫描仪中采集到大量的点云图资料时,都要利用特定的运算法则进行集成和匹配。该方法可以有效地克服点云的大量拼接问题,从而实现点云建模的真实性。利用现有扫描设备的三维点云数据,将其转化成一个标准线上的3D点云资料。点云匹配是点云数据的重要组成部分,它的准确与否对数据建模的准确性有着重要的作用。
3 三维激光扫描测量方法的应用
3.1 准备工作
①应用便携式背囊三维激光扫描仪对乡村土地使用权登记进行前期的工作非常必要。为获取舒家坝镇点云资料所做的准备工作包括:扫描设备、基础资料准备、扫描轨迹规划、基准站设置等。
②基础数据及扫描仪器的制作。主要内容有:测区主控点相关数据、测区概况、技术任务书;徕卡PegasusBackpack 便携式背包扫描器,其他的扫描器,以及 GPS 的双重频率接收器;在此试验中使用的 PegasusBackpack 便携式背包扫描器见表1,而表2是扫描设备的技术指标。
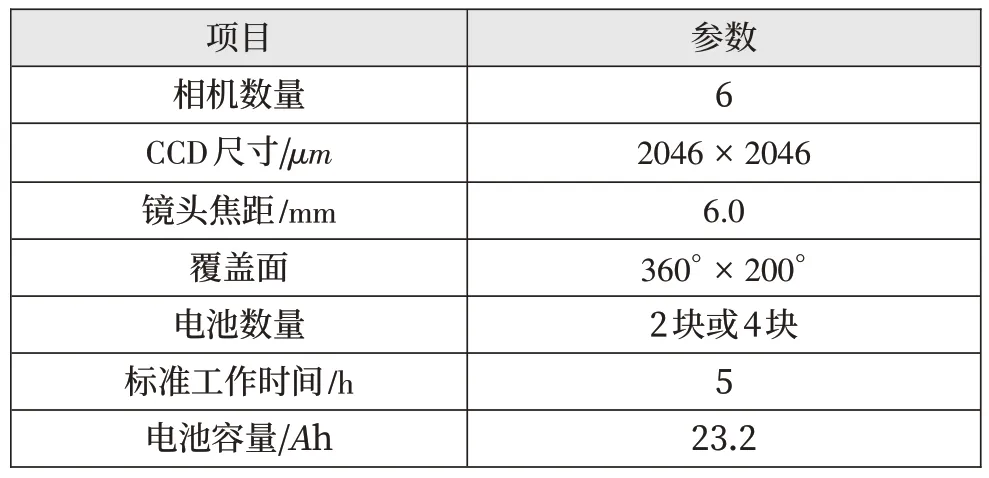
表1 设备参数

表2 扫描仪技术参数表
③扫描轨道计划。扫描轨道规划是针对移动背包扫描器技术特性,设计出一条正确的扫描线路,以确保测量区域的覆盖面。首先,本文介绍了一种基于GPS和IMU的GPS,并采用SLAM技术,在360英寸内进行扫描,观察到的物体,就能获得60,000 维点云的信息。其次,对测区地形、交通拥挤程度、不动产密度、障碍物等进行了现场调查。最后,在测试区域选取合适的初始化点位。通过该系统绘制了该测试范围内的有效扫描范围,并绘制了该测试范围内的扫描路径。
④建立基准台。参考站通常布置在现有CORS站点或现有的主控制点上,选取跟测区20km以内没有任何扰动的空地,通过POS资料对路径进行融合。
3.2 扫描数据处理与不动产要素提取
①扫描仪数据的处理主要是将静态GPS 数据、激光扫描仪数据、GNSS+IMU 数据和视频数据进行数据分析,并对云和图像和坐标进行分析,最后以准确定位和结构特征的3D 点云数据作为数据。采用Inertial Explorer进行了轨道分析,并采用AutoP的预处理程序实现了3D点云的三维数据分析。
②轨道的解析;采用Inertial Explorer 轨道解算程序对其进行了微分,将参考站点与移动包的资料进行了转换,并将其与手机POS资料融合,得出了该系统的POS 值。最后利用估计算法、数据采集率和电离层模式等手段来克服多种GPS信号的偏差因子对手机POS 数据产生的干扰,并利用数据进行统计和分析,得到点云数据。
③产生3D 点云资料。采用AutoP 的预处理程序,只需简单设定即可完成时间匹配,可以根据参考站数据与移动背包的POS 数据进行时间、轨迹的匹配,从而避免数据之间的错误。点云资料的准确空间坐标系必须在西安80 坐标系和1985 坐标系下进行校正,从而获得WGS-84 坐标系与西安80 坐标系的坐标系变换,并将这些参量引入到3D 点云资料中,形成准确的坐标和颜色。简而言之,移动背包3D 激光扫描机的内部数据,先将静态GPS 数据、移动背包POS 数据与点云数据相结合,再结合点云数据进行数据处理。通过对点云与影像资料的综合,得到具有位置、姿态和颜色等信息的立体点云资料。
④房地产的提取重点。要解决我国乡村不动产的问题,就必须对激光扫描设备进行空间坐标矢量化,并抽取测量区域和住宅小区的面积。房地产元素抽取采用了第三方云计算技术,利用AutoCAD技术,对点云进行抽取。具体的操作有:首先,向Cloudworx 中引入数以百万计的点云信息,按宗地、房屋划分点云(引入点云的顶部视图)。第二个阶段为Cloudworx 插件,通过选取多种视角的方式进行建筑元素的抽取,由内部行业的绘图人员通过对房地产的形态进行判别和变化的定位,并对其进行空间坐标的提取。第三个步骤是抽取点位,然后画出地块和房子的等值;第四个步骤是对具有显著特点的元素进行抽取,这是一个困难的过程;采用了传统的全站和GPS-RTK技术,对当地的土地进行了人工补测和返工。
3.3 实验结果及分析
房地产权属查勘资料的准确与否,是对其进行评估的唯一依据。所以,准确地获得房地产的各种因素就变得非常关键。文中的测量精度比较主要有:测量数据的精确测量和边界测量数据的精度比较。在精度比较中,根据乡村测绘技术规程,将基准坐标的精度基准设定为0.05m。
①资料精确性:采用激光三坐标测量技术,能达到测量界址、界址、宗地面积、房屋面积等的精确测量;这些资料中,有一小部分无法全面地达到对乡村房地产权籍调查资料的准确性的需求;其原因是地形、地形、房屋分布、结构特征以及激光三维成像技术自身的精度等;在此背景下,采用变形率低的钢卷尺进行现场产权普查,并将其与3D模型资料进行对比,可以有效改善技术资料的品质。
②三维激光扫描系统的三维模型直观、可重复使用,值得推广。
3.4 影响因素分析
利用便携式背囊三维激光扫描仪,在茅坪里村0.06km2范围内采集到30 个3D 点云模式,利用此模式绘制出了DLG 图像。利用现场测量和三坐标点云模式的检验,对试验结果的准确性产生了一定的影响。
①SLAM方法的适用范围很广。在GPS信号不好的情况下,采用SLAM 方法进行位置和位置的自动定位,随着点云方向的增大,得到的资料品质也会下降,巷道、偏房、树木较多,点云的位置范围较大,对点云的数据准确率有较大的影响,在抽取房地产单元时会出现边界(直线)的错误。
②激光体系中的有效扫描半径。便携式背包型扫描器的有效探测范围可达50多公尺,而扫描器在收集点云时,某些后室和远室的点云资料比较稀少,且准确率不高,影响了三维激光扫描点云的获取存在着很大的死角和区域不完全性,凭点云的特征点和线元素提取时存在着定位错误。
③三维点云模式可视度较差;由于激光扫描所产生的点云状立体图大多依赖于影像,所以其可视度不高。对于某些繁杂的房地产要素,在制作数码线画时,由于业务人员对点和线要素的识别存在一定的偏差。
4 结语
在实际生产中,利用激光地表3D扫描技术是切实可行的,其准确率达到了国家标准制图技术规范的规定,可以大幅度降低外业工作人员的投入,为国土空间规划、自然资源确权、不动产登记等工作提供客观、时效性强的基础地理信息数据,生产应用前景较好。当前,在房地产开发中,三维立体成像技术仍处在初级发展的初级水平,在实际工程建设中,需要进行实地观测、标靶数量、控制点精度、点云处理精度等优化工作,但仍存在作业流程、技术优化方法、数据共享等不健全的问题,其应用的深度和广度还需要不断提升,但其精度、点云量等都是其他技术难以企及的,因此,三维技术将成为一个具有广泛应用价值的新技术。
猜你喜欢
昆明医科大学学报(2021年6期)2021-07-31
科学(2020年5期)2020-11-26
考试与评价·八年级版(2020年4期)2020-10-26
考试与评价·八年级版(2020年1期)2020-10-26
考试与评价·八年级版(2020年1期)2020-10-26
小哥白尼(趣味科学)(2019年2期)2019-04-17
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
发明与创新(2015年30期)2015-02-27
现代营销·经营版(2013年5期)2013-05-14