基于角点特征的电力绝缘子视觉识别方法
2023-12-21 12:38:24彭思远张宏伟
河南工程学院学报(自然科学版) 2023年4期
彭思远, 张宏伟, 江 维, 严 宇
(1.武汉纺织大学 机械工程与自动化学院,湖北 武汉 430073;2.国网湖南省电力有限公司超高压变电公司,湖南 长沙 410004)
绝缘子串是电力系统的重要设备,一旦出现故障会影响整个电力系统安全稳定运行。 长时间服役于恶劣环境会使绝缘子串出现故障的概率大大增加,因此需要定期检修。 检修前最重要的是检测线路上的绝缘子。 目前绝缘子视觉检测的方法主要有两大类,第一类是基于机器学习[1-2]的检测方法,如传统的HOUGH变换边缘检测方法[3]、几何特征检测方法[4],这些算法可以检测到背景简单的绝缘子,但对于图像背景复杂的系统检测效果欠佳,而且算法复杂度过大会影响视觉伺服控制的实时性。 第二类是基于深度学习[5-7]的绝缘子检测方法,如基于卷积神经网络的检测方法[8-9]、YOLO 网络检测方法[10-11]等,虽然这些方法检测精度更高、速度更快,但是它们要求的硬件平台费用较高,同时检测精度以算法模型复杂度为代价,在实际移动控制终端中难以部署,算法模型难以普及。 因此,寻求一种性价比高的绝缘子检测算法,使其既能够满足检测要求,又能够尽可能地降低平台成本,是目前研究的一个重要方向。
本研究提出了一种基于角点特征的绝缘子视觉识别方法,通过绝缘子串几何特征分析和角点提取算法将绝缘子串的角点提取出来,各角点连接所形成的闭环区域即检测所得到的绝缘子。 该方法能够较为精准地实现绝缘子串的检测,且对系统平台要求不高,性价比较高,能够满足系统检测要求。 同时,该方法检测的是绝缘子边缘形状突出的位置,分布于绝缘子上的不同污秽区并不会对角点检测造成过大影响,算法整体对于自身盘面污秽具有一定的自适应性。 本研究可为线路绝缘子智能检修提供有力的技术保障,对电力系统运维管理具有重要理论意义与实际应用价值。
1 Shi-Tomasi 角点检测算法的基本原理
1.1 绝缘子角点特征分析
角点即图像上明显突出的点,在计算机视觉领域,角点是图像中梯度值和梯度方向变化速率都很高的点。 角点具有明显的特征,常被用于图像特征提取。 立式绝缘子及其单片片状绝缘子在不同角度的角点分布见图1。 通过绝缘子角点分布和几何特征可知,角点个数较多的区域就是所检测到的绝缘子串。因此,可以通过算法提取绝缘子串上的角点,通过角点区域检测绝缘子串。
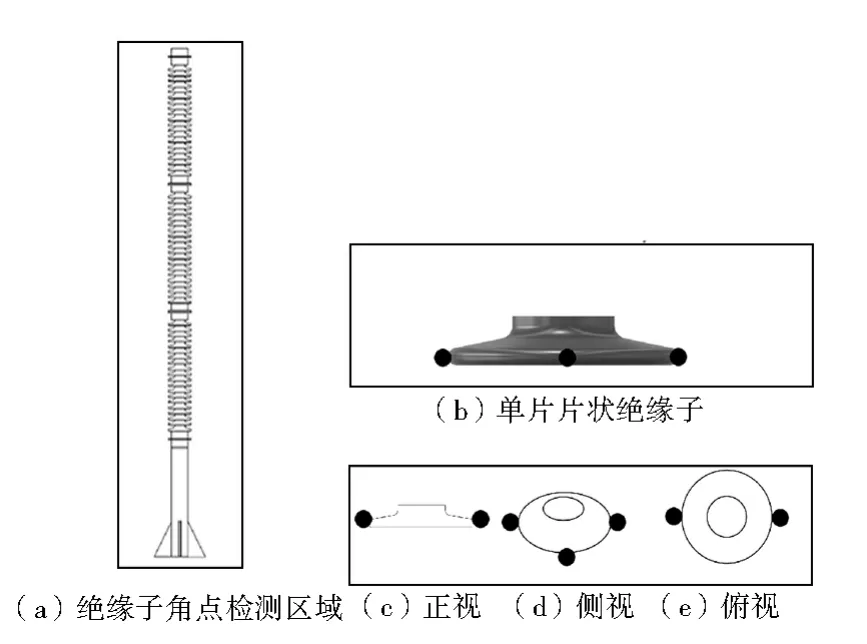
图1 绝缘子角点分布Fig.1 Insulator corner point distribution
1.2 角点特征检测的理论模型
Harris 角点检测算法和Shi-Tomasi 算法都是常用的角点检测算法,后者是前者的改进。 Harris 角点检测算法的原理是构建一个图像变化函数,用滑动窗口试图寻找合适参数使其图像变换函数最大化,以实现寻找图像中灰度明显变化的点。 该算法首先构建图像变化函数E(u,v) :
式中:w(x,y) 为高斯函数像素权重;I(x,y) 为初始位置局部像素窗口;I(x+u,y+v) 为x方向寻找u个长度、y方向寻找v个长度的局部像素窗口。 对始末位置的像素窗口计算差值的平方来表述图像局部像素的变化。 角点位于该图像变化函数局部最大值处,由此计算该函数局部最大值。 对E(u,v) 中的I(x+u,y+v) 进行泰勒展开:
将式(2) 写成矩阵形式:
矩阵乘以向量的几何意义是将这个向量旋转,且向量的值也会改变,可将[uv]×P和PT×[uv]T分别计算:
式中:u′、v′为旋转之后的变换向量。E(u,v) 可变换为
展开式(6) 并写成椭圆形式:
1.3 角点特征的判别方法
基于上述分析,Harris 角点检测算法在滑动窗口期判断角点时,只需要计算特征值λ1、λ2,在λ1、λ2均很大时,可视为角点。 但是,如调整λ1、λ2为两个很大且较为分散的参数,就有必要简化为一个参数R,从而更好地概括λ1、λ2的均变大特性。 Harris 角点检测算法按式(8) 来确定参数R:
当λ1、λ2都很大且相近时,R也很大,就可视为角点。 Harris 角点检测算法具有旋转不变性,但公式(8) 中,K值是靠经验设定的,无法取到最佳值。 而在Shi-Tomasi 算法中要使得λ1、λ2两特征值均取最大值,只需要将其中较小的特征值最大化即可,即R= min(λ1,λ2) ,这样就避免了经验设定K值带来的非最佳角点问题。
2 绝缘子的角点视觉检测方法
绝缘子视觉定位检测流程如图2 所示。 整个系统分为现场层、算法处理层和应用层,其中现场层是现场采集绝缘子样本图片的输电线场景,应用层是将获得的处理结果应用于视觉伺服控制,核心部分是算法处理层。 在算法处理层,先通过双边滤波增强边缘特征,再通过自适应阈值均衡化极大增强绝缘子清晰度,之后通过阈值分割和边缘提取操作得到绝缘子的边缘轮廓,采用形态学闭运算填充空洞,突出角点,最后通过Shi-Tomasi 角点检测算法提取角点。 将提取到的角点作为矩形的角点绘制最大旋转矩形,即可得到绝缘子定位框选图。 由于提取角点必定会出现角点冗余的情况,因此需要使用Shi-Tomasi 算法用于角点检测,指定检测到的角点个数、质量和各角点间的欧氏距离,由此查找筛选最合适的角点。 此时,待测绝缘子图片角点特征较为明显,角点集中于绝缘子伞裙内外边缘,通过筛选即可得到最合适的角点。 将检测到的角点绘制出最小旋转矩形,即可定位绝缘子位置。
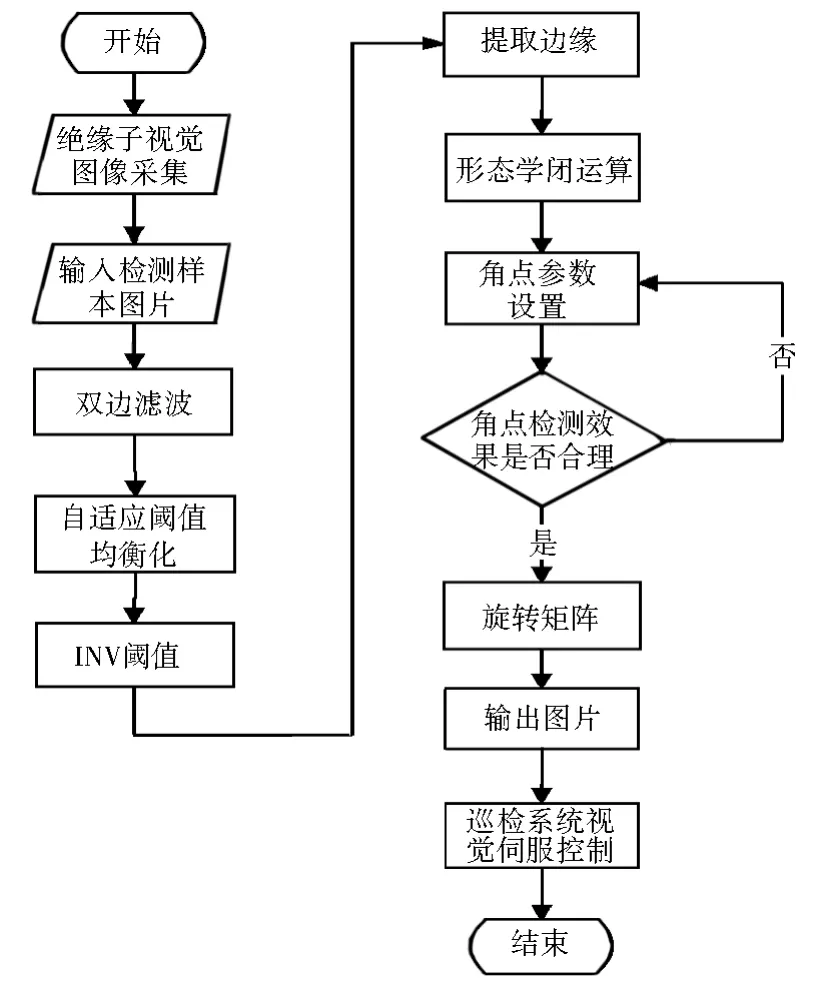
图2 绝缘子视觉定位检测流程Fig.2 Insulator visual positioning inspection process
3 仿真实验
为验证基于角点特征的绝缘子视觉识别算法的可行性,对采集的绝缘子现场图片进行定位,实验平台使用Open CV 计算机视觉库、机器学习函数库和NumPy 数学函数库,选取两张绝缘子串图片进行仿真实验,定位效果如图3 所示。 从图3 可以看出,对原始图片进行一系列处理可以得到绝缘子串的角点,角点区域连接得到的矩形可以涵盖绝缘子串。

图3 绝缘子识别定位效果Fig.3 Insulator identification and positioning effect
为验证算法的准确率,分别对绝缘子串进行5 次检测实验,得到了正常角点数和异常角点数,从而获取每轮检测的准确率和算法的响应速度等性能,结果如表1 所示。 由表1 可知,本算法的平均准确率为89.33%,平均响应速度为0.193 9 s,能够满足绝缘子串实时检测需求。 为进一步验证算法的优势,将本算法与传统的HOUGH 变换算法及YOLOv4 深度学习算法进行了对比,结果如表2 所示。 由表2 可知,YOLOv4算法的平均检测准确率可以达到92.98%,在3 种算法中最高。 但是,YOLOv4 算法检测需要建立大量的样本库,且对检测平台硬件的要求较高。 小型检测系统采用传统机器学习检测算法性价比较高,同时角点检测算法比HOUGH 变换算法的平均精度要高。 因此,角点检测算法是一种性价比高且能够实现电力系统绝缘子串图像视觉检测与识别的算法。

表1 算法检测性能Tab.1 Algorithm detection performance

表2 不同算法检测性能对比Tab.2 Comparison of detection performance of different algorithms
4 结论与展望
本研究针对电力绝缘子串的视觉检测,提出了一种基于绝缘子角点特征的绝缘子串视觉检测方法。 首先对绝缘子串不同形态特征进行分析,详细阐述了角点检测的相关理论,然后给出了绝缘子串角点检测流程,并在Open CV 环境下对角点检测算法进行仿真,验证了该算法对于电力绝缘子串检测的有效性。 然而实际的绝缘子串服役于野外环境,其背景相当复杂,同时外界因素也会影响绝缘子串成像质量,因此后续绝缘子串识别算法需要重点考虑光照、复杂背景等因素,以提高算法对野外环境的自适应能力。
猜你喜欢
疯狂英语·新策略(2019年10期)2019-12-13 08:43:28
当代陕西(2019年10期)2019-06-03 10:12:04
电子技术与软件工程(2018年10期)2018-07-16 12:04:18
数学小灵通·3-4年级(2017年9期)2017-10-13 08:10:54
电子科技(2016年12期)2016-12-26 02:25:49
系统工程与电子技术(2016年4期)2016-08-24 07:46:28
电力建设(2015年2期)2015-07-12 14:15:59
电测与仪表(2014年6期)2014-04-04 11:59:46
电气传动自动化(2014年6期)2014-03-20 13:36:25
河南科技(2014年23期)2014-02-27 14:19:15