基于疲劳监测的驾驶风险评估系统设计
2023-12-21 11:59张皓月周铭哲徐韬茗李紫云
电子产品世界 2023年10期
张皓月 周铭哲 徐韬茗 李紫云
关键词:交通风险评估;树莓派;疲劳驾驶;Logistic 回归模型
中图分类号:U463.6;U491.31;TP391.41 文献标识码:A
0 引言
道路交通运输是我国重要的运输方式之一,在社会经济发展中发挥着至关重要的作用。据统计,我国每年有近6 万人在交通事故中丧生,交通事故给人民财产造成了超过10 亿元的重大损失,道路交通事故特别是重特大交通事故给社会带来了巨大损害。
通过对高速公路交通事故的统计分析发现,由于驾驶员操作失误产生的事故约占交通事故总量的80%[1],由于驾驶员疲劳驾驶造成的事故占交通事故总量的10% ~ 20% [2],在特大交通事故中,驾驶员疲劳驾驶导致的交通事故比例更是高达40%,疲劳驾驶已成为造成交通事故的重要因素[3]。因此研发一款通过采取有效措施改善驾驶员疲劳驾驶的装置对降低交通事故发生概率、提高道路安全水平具有重大意义。
1 驾驶风险评估系统设计
1.1 系统硬件设计
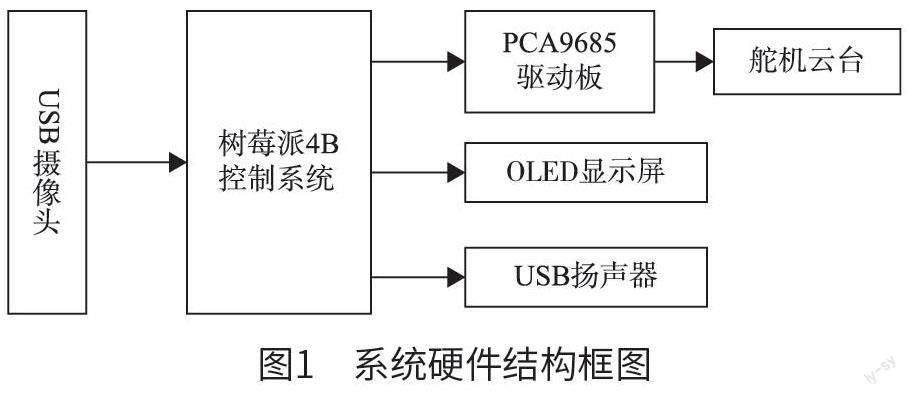
该系统硬件部分以树莓派4B 作为主控模块;采用摄像头进行图像采集;采用OLED(有机发光二极管)显示屏作为显示模块;采用舵机云台实现运动跟踪,为实现人脸动态跟踪,其硬件上采用了舵机云台作为执行机构,执行器采用两个舵机,分别完成x 轴和y 轴两维的运动控制;采用USB 扬声器作为语音播报模块,在监测过程中完成相应的语音提醒。该系统硬件结构框图如图1 所示。
1.2 系统软件设计
1.2.1 驾驶疲劳检测软件设计
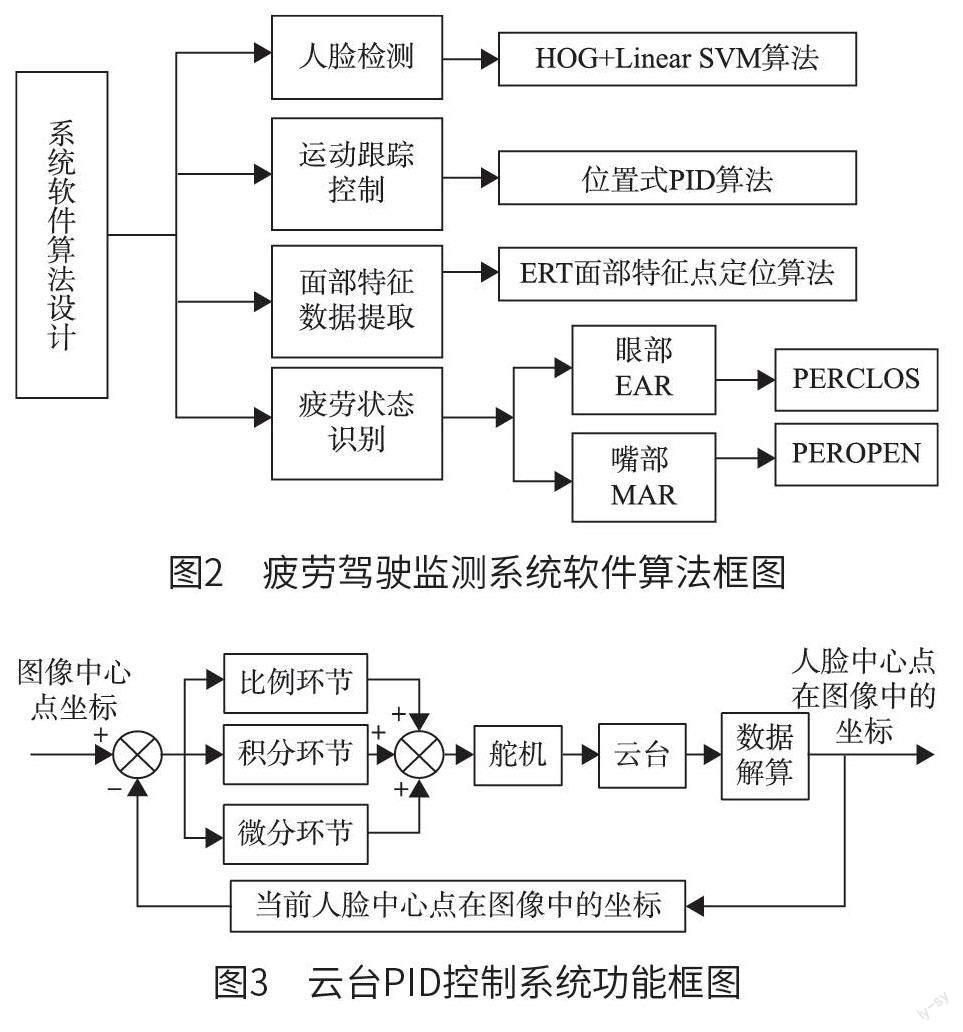
疲劳检测部分软件设计通过Python 语言编程实现。首先通过SVM(支持向量机)线性分类器生成人脸检测器对驾驶员进行人脸检测;其次将检测到的人脸数据输入到预先训练好的面部形状预测器模型中,完成对驾驶员眼部、嘴部特征数据的提取,通过对疲劳状态时的眼部、嘴部状态定义阈值进而判断驾驶员是否疲劳驾驶[4-5],其中面部形状预测器模型是基于ERT(回归树集合)面部特征点定位算法和iBUG-300W 数据集自定义训练得出的。在提取面部的眼嘴特征数据后,采用纵横比(AR)的方法对提取的眼嘴特征数据进行计算处理,得出眼部纵横比(EAR)和嘴巴纵横比(MAR);采用单位时间内眼睛闭合(PERCLOS)与嘴巴张开(PEROPEN)的时间,用以识别驾驶员的疲劳状态,实现疲劳状态检测[6]。
同时系统又结合PID 算法,在检测到人脸的基础上采用位置式PID 控制舵机云台,使其完成对驾驶员人脸的运动跟踪,实现在不同驾驶状态下进行监测[7];并在驾驶员处于疲劳状态时对其进行语音播报提醒。疲劳驾驶监测系统软件算法框图如图2所示。
在检测到驾驶员人脸的基础上,采用位置式PID 算法,以摄像头采集到的图像中心点作为输入,以舵机为执行机构,将输出给到舵机云台,使其做出相应的跟踪。云台PID 控制系统功能框图如图3所示。
1.2.2 Logistic 风险评价模型设计
通过对事故数据和以往研究成果的统计分析,证实了“人—车—路—环境”4 个方面是影响高速公路交通安全的主要风险因素来源;只基于单一类型风险因素建模,可能会导致评价结果偏差。因此本文综合人、车、路、环境4 个方面对驾驶员驾驶风险进行预测评价[8]。
通过国际交通论坛(International TransportForum,ITF)官网数据库,筛选了符合条件的492条2020 — 2021 年英国东北部的交通事故数据导入SPSS 软件中。
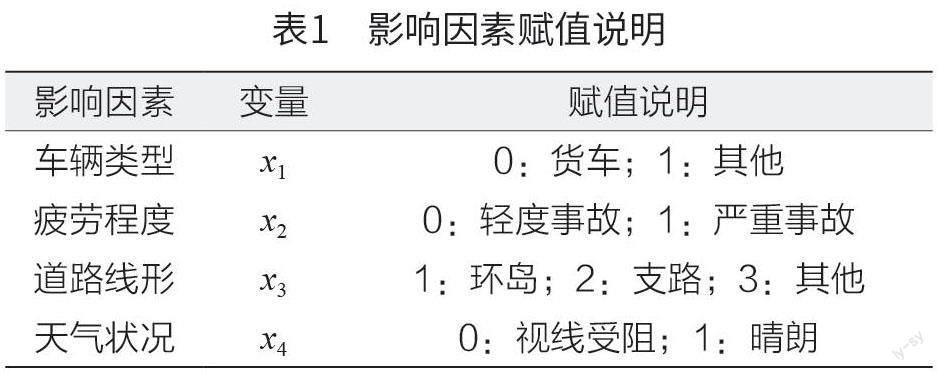
根据Logistic 回归理论从人、车、路、环境4 个方面对驾驶风险相关因素的影响程度进行探析和定量化,对特征变量进行赋值。影响因素赋值说明如表1 所示。
采取正向逐步法,将显著水平设为α=0.05。可建立基于人、车、路、环境4 个方面的驾驶风险预测评价模型。
2 驾驶风险系统测试及分析
2.1 疲劳监测功能测试及分析
最终测试的软件环境为OpenCV-3.4.3+dlib-19.22,在背光与对光两种环境下,对3 名驾驶员的眼睛(1号驾驶员眼睛大小中等,2 号较小,3 号较大)各测试10 次,运行程序,得到其疲劳识别率背光与对光环境测试数据分别如表2 和表3 所示。
由表2 可知,本系统在背光环境下对3 名驾驶员疲劳驾驶时眼部的平均识别率为83.3%,其嘴部平均识别率为93.3%,综合计算为88.3%,其效果一般。分析原因有二:其一为背光下存在检测不到人脸的情况;其二为系统对眼睛较小的眼部识别率较低,因为眼睛小,EAR 区别度小,对识别率有一定的影响。
由表3 可知,本系统在对光环境下对疲劳驾驶识别率达90% 以上,可对驾驶员的疲劳驾驶起到监测作用。
人脸动态跟踪最终预期的效果是在驾驶室范围内,模拟驾驶员不断摆动头部,得出云台跟踪人脸的动态响应曲线如图4 所示。
图4 中曲线1 为x 轴舵机的动态响应曲线,曲线2 为y 轴舵机的动态响应曲线,曲线3 为x 轴舵机目标值曲线,曲线4 为y 轴舵机目标值曲线。分别对曲线1 和曲线2 关键点进行标点,其中P3、P5、P7、P9 表示每次摆头后人脸中心点在图像中的新x 轴坐标,P4、P6、P8、P10 表示每次摆头后云台跟踪人脸稳定后人脸中心点在图像中的x 轴坐标;P3'、P5'、P7'、P9' 表示每次摆头后人脸中心点在图像中的新y 轴坐标,P4'、P6'、P8'、P10' 表示每次摆头后云台跟踪人脸稳定后人脸中心点在图像中的y 轴坐标。
分析云台的快速性,可通过计算每次摆头至云台跟踪人脸稳后的时间差得出云台响应时间。由表4 可知,云台x 轴舵机平均响应时间为2.112 5s,y 轴舵机平均响应时间为1.5 s,因此云台跟踪人脸的快速性基本满足系统设计要求。
2.2 Logistic 风险评价模型检验
模型系数的综合检验如表5 所示。若P < 0.05,则表示在拟合出的模型中,纳入的变量至少有一个的OR(比值比)值具有统计学意义,即模型总体有意义[9]。
本文采用霍斯默—莱梅肖拟合优度检验(表6)来检验本系统模型的拟合优度。当P 值不小于检验水准时(P ≥ 0.05),表示数据中的信息已被充分提取,即预测值与真实值之间并无明显的差异,模型拟合优度较高[10]。
3 結论
本文引入了驾驶员实时疲劳检测结果,并基于二元Logistic 回归模型建立了综合“人—车—路—环境”多因素的驾驶风险评估系统。将基于面部多特征的疲劳驾驶检测结果作为驾驶员驾驶状态输入,将通过高德地图API 获得的驾驶员行驶路线、当前天气状况、车辆类型分别作为“路”“环境”“车”等因素的自变量输入,建立驾驶风险评估系统。同时在疲劳监测装置上添加显示屏,能够实时提供给驾驶员上述驾驶安全影响因素的数据,并给予最终风险评估。针对疲劳驾驶监测,设计疲劳状态识别算法,同时采用舵机云台结合PID 算法对人脸实时动态跟踪,保证驾驶员面部在摄像头监测范围内,提高识别准确率。本系统运行良好,基本能实现预期目标,具有一定的实用价值。
猜你喜欢
电脑知识与技术(2016年31期)2017-02-27
东方教育(2016年9期)2017-01-17
农家科技下旬刊(2016年9期)2016-12-15
科教导刊(2016年27期)2016-11-15
科教导刊·电子版(2016年23期)2016-10-31
商(2016年28期)2016-10-27
中国市场(2016年34期)2016-10-15
商(2016年6期)2016-04-20
科技视界(2015年29期)2015-10-19
现代电子技术(2015年18期)2015-09-16