
载物电气运输设备移动性能标准研究*
2023-12-20 10:34文/邢琳王萌
质量与标准化 2023年10期
文/邢 琳 王 萌
2019 年,国际电工委员会(IEC)新设立了一个技术委员会TC 125,专门开展“电气运输设备”的国际标准化工作,并给出了该品类的定义:在公共道路和公共空间使用的,由电力驱动的运输设备。电气运输设备可以单独或同时运输人员和货物,可由手动操作,具备自动化功能或全自动运行功能。载物电气运输设备(CeT)作为一个品类的名称,被定义为:主要设计用于物品运输的电气运输设备,其使用的场景主要分为楼宇、半封闭园区和道路等,而作为新兴品类,其产品的价值就是通过自主导航的方式完成短途配送运输,移动过程中可能涉及平直、上下坡、转弯和过窄门等情况,其移动性能的好坏决定了该类产品是否能代替人力,完成运送任务。因此“电气运输设备 第3-2 部分:载物电气运输设备移动性能测试方法”(以下简称“IEC 63281-3-2”)就典型运行状态开展测试方法研究,以形成可实现、可复现的测试方法,客观评价产品的移动性能。
在各国,此类产品可能被称为“无人配送车”“配送机器人”,相关标准发展情况差异较大。由于该类产品具有智能化、小型化的特点,在代替劳动力、实现短驳配送方面具有巨大的潜在市场,故在楼宇或半封闭园区的落地应用较多。我国在该领域已发布1 项相关的团体标准《智能化无人载物设备通用技术条件》(T/CEEIA597-2022)。
本文结合IEC 63281-3-2 研制的目的,根据标准研制过程中开展的大量测试与验证,对目前确定的测试条件进行解析。
一、产业现状
目前,CeT 的产品形态不断丰富,应用场景日益多样化。全球市场规模逐年稳定增长,包括科技巨头、初创公司和传统汽车制造商在内的众多企业纷纷加入相关技术的研究,在保障产品安全性的前提下,进一步扩展产品功能、提升产品性能,推动CeT 在更多细分场景下的落地应用。
二、技术特点和发展趋势
CeT 的功能和性能依靠自动驾驶、物联网、大数据和云计算等多项技术实现,其中自动驾驶技术是支撑任何场景、任何形态的产品实现自主移动的核心和基础,包含了传感与感知、决策与规划、控制与执行3 个方面。
在传感与感知中,CeT 使用激光雷达、摄像头和超声波传感器等多种传感器实时获取环境信息,并通过多源信息的同步、匹配和通信,将不同传感器的信息融合,构成包含时间和空间的环境模型,以实现环境感知和场景认知,包括对人员、台阶、其他运输设备、障碍物和道路几何等的识别与定位。相较于室内场景,在室外使用的CeT由于天气、光照和道路交通的复杂性等因素,其感知系统需要融合更多的信息量才能保证结果的真实性,同时对实时性的要求也更高。
CeT 的决策与规划是在环境感知的基础上,使用全球定位系统(GPS)、惯性导航系统(INS)、即时定位与地图构建(SLAM)等技术获取自身位置、速度和方向等信息,进而通过AI 算法,规划出从当前位置到目标位置的无碰撞最优移动路径。
在控制与执行中,CeT 根据规划路径下达运动指令,执行结构按指令驱动设备移动。其间,CeT 的速度会受到路面材质、平坦度、宽阔程度和障碍物的影响。因此,CeT 需要借助传感器的反馈信息,实时调整运动控制策略,包括速度调整、角度调整、边缘检测、碰撞检测和障碍物避让等,以应对使用场景中的环境与路况变化。
未来,在更多室内外场景下代替人工进行物品配送是CeT 发展的必然趋势,然而,由于场景的多样性,其大规模应用还颇具挑战。要想突破这一制约,高度的安全性能和稳定性能缺一不可。适应各种场景、应对各种突发状况和降低各种事故风险是CeT 获得大众信任的关键,而移动性能是其实现配送功能的重要评价对象,受到研发人员、用户和第三方的高度关注。
三、典型项目研究与解析
1. 测试项目设置逻辑
在快递物流、酒店餐饮和移动零售等各种室内外场景中,影响CeT 移动性能的因素众多。因此,IEC 63281-3-2 针对CeT 移动中典型的性能设置测试项目,覆盖了典型运行路况下预期遇到的典型场景,如转弯、爬坡和越沟等9 个测试项目。
2. 测试条件设置逻辑
测试条件的设置应确保测试结果的可复现性。IEC 63281-3-2 分别从外部条件和被测对象两个方面对影响测试结果的各因素进行了细化规定,如路面材质、坡度值、道路宽度、弯道与障碍物等。此外,CeT 自身的配置、电量和负载情况等也会造成性能的差异。
IEC 63281-3-2 要求待测的CeT 应满足以下条件:调整到制造商指定的典型配置,如额定速度、额定负载等;测试前进行功能检查,以确保正常运行;测试前,电池至少完成一次充放电循环,完全放电的操作应按照制造商的说明在正常操作下进行;测试前,按照制造商规定充满电(避免测试中断和由于电量不足导致性能降低);在额定负载下进行测试时,额定负载应合理均匀分布。
3. 道路相关项目
道路条件(如路面材质与坡度)是影响CeT移动性能的重要因素。本研究设置室外场景水泥路面或沥青路面、室内场景地板等道路条件,对CeT 开展测试。研究发现,由于摩擦系数不同,实际运行速度会存在明显差异,而目前CeT 制造商声明的行驶速度,并未明确在什么路面进行测试,这也造成了用户体验与声明值之间存在巨大差异。故IEC 63281-3-2 规定:额定速度测试路面材质应根据预期使用场景选择最严苛的材质,摩擦系数在0.75~1.0 之间。
此外,室外道路通常是具有坡度的,甚至会存在坡度较大的拱桥等,室内场景的道路也并不都是平坦的。因此,CeT 能否爬上斜坡、爬坡的速度能否满足实际的使用需求同样值得关注。基于上述考虑,本文规定了最大速度、最大爬坡角度和最大爬坡速度3 个项目,以获取最不利工况下的速度和角度。测试的具体要求与分析见表1。

图1 最大爬坡角度测试示意图

表1 测试的具体要求与分析(部分)
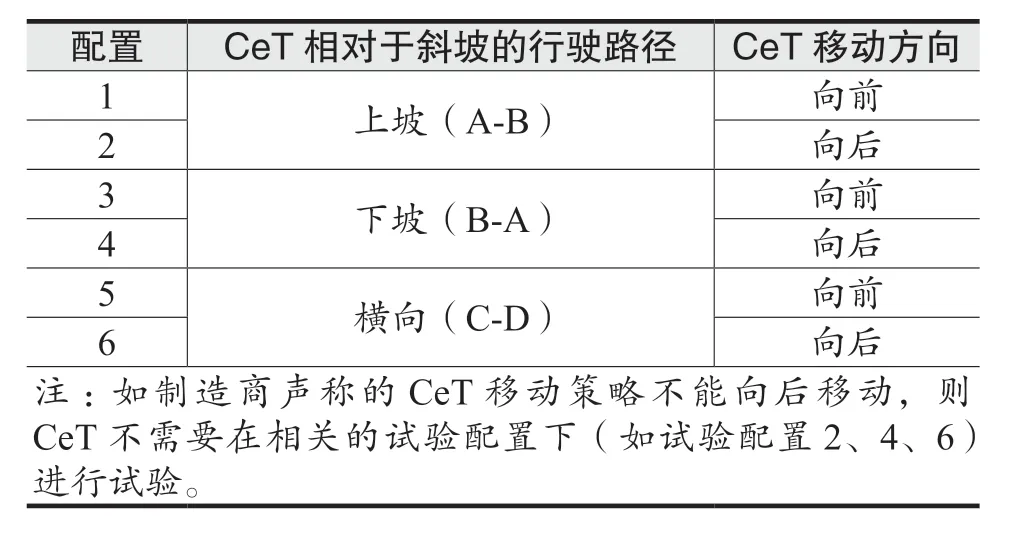
表2 CeT 最大爬坡角度试验配置
4. 场景布局相关项目
CeT 应用的场景众多,不同场景中的布局也不尽相同。IEC 63281-3-2 综合考虑了室内和室外场景的特征,选取普遍存在的转角、窄道和沟槽作为典型布局,考察CeT 能否顺利通过室外场景中的路口、路桩和沟渠等,室内场景中的走廊、门框和台阶等。该项目根据上述典型布局,规定了转弯特性、边缘检测和最窄通过宽度3 个项目的测试方法,以衡量CeT 在不同布局下的通行性能。测试的具体要求见表3。
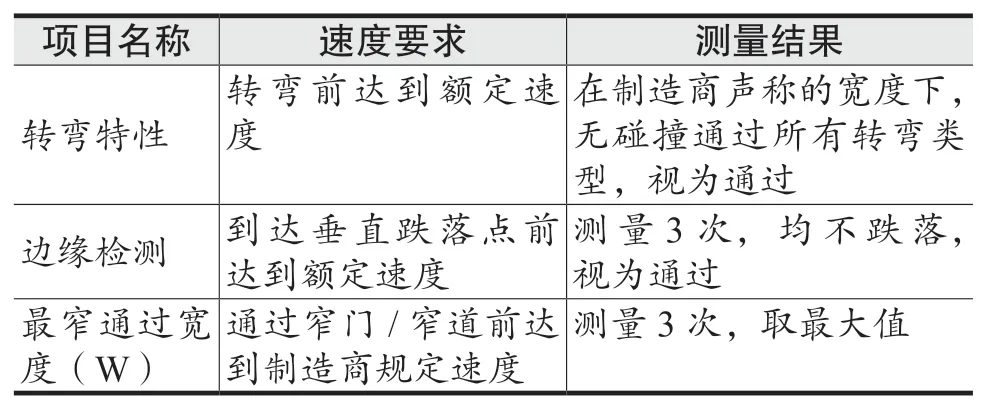
表3 设备额定负载场景布局相关项目测试要求
其中,转弯特性规定了3 种转弯类型(见图2),在CeT 避障功能开启的情况下进行测试,测量其调头、转向所需的最小道路宽度。在边缘检测中,IEC 63281-3-2 对模拟沟渠的垂直跌落点尺寸进行了规定,其深度应大于CeT 最大轮子的半径,宽度应大于最大轮子的直径,长度应至少为CeT 长度的3 倍,从而确保CeT 进行路径的决策规划。在最窄通过宽度中,考虑到CeT 会存在以不同的方向行驶到窄门/窄道入口的情况,因此为保证测试一致性,IEC 63281-3-2 在距离窄门/窄道3 m处规定了进入角度ϴ(见图3),通过调节ϴ的角度在不同的方向下依次进行最窄通过测试。
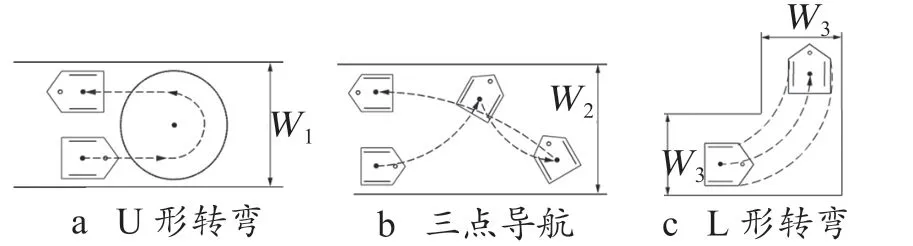
图2 3 种转弯类型

图3 最窄通过宽度测试示意图
5. 障碍物相关项目解析
IEC 63281-3-2 规定了障碍物相关测试项目:障碍物检测距离、避障、与物体的接触力。原因是:在CeT 运行过程中,障碍物可谓是无处不在,为避免与障碍物发生碰撞,CeT 应具备检测感知障碍物并进行决策规划的能力。考虑到在感知或避障不及时/失败的情况下,CeT 与障碍物会发生碰撞,此时不应对人员或物品造成安全威胁。
IEC 63281-3-2 明确了CeT 运行过程中可能遇到的典型障碍物,分析了其对应的实际场景(见表4),并将其归类为3 种:设施类(墙体、玻璃门、落地窗等)、人员类(人体躯干和人类手臂或腿部)和警示牌(三角架)等。

表4 典型障碍物及其对应的实际场景(部分)
为了保证测试的复现性和结果的稳定性,IEC 63281-3-2 对于障碍物检测距离、避障、与物体的接触力都明确规定在额定负载下进行测试,测量都要求3 次。主要要求与分析见表5。

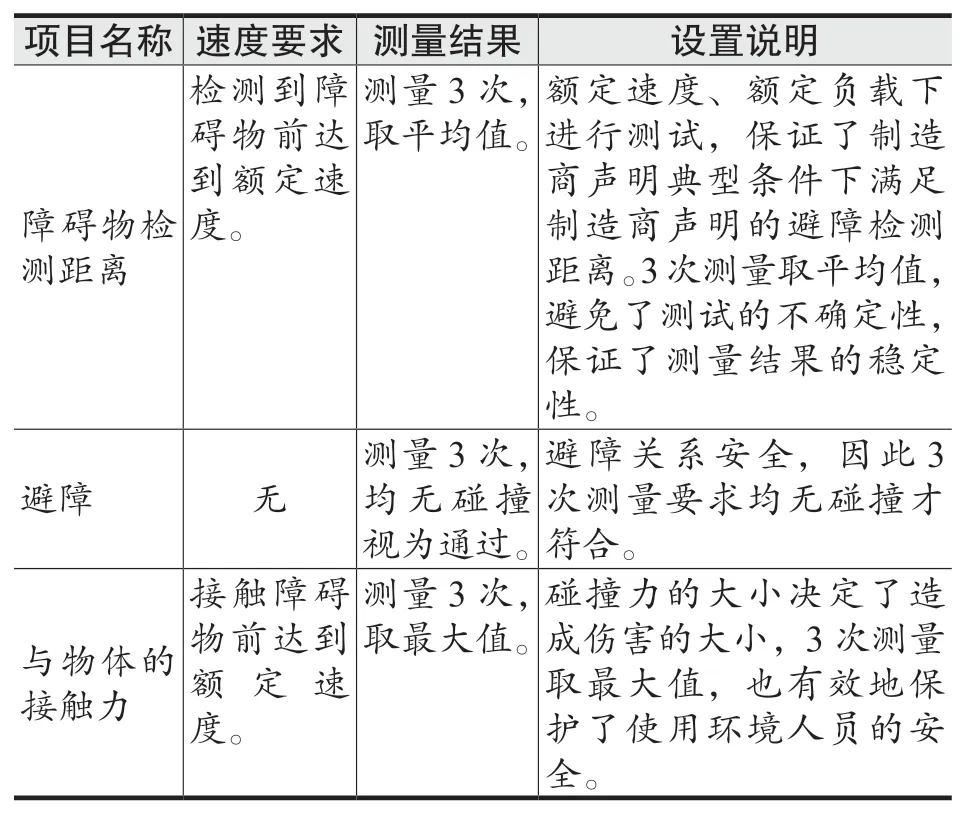
表5 设备额定负载障碍物相关项目测试要求
四、结 语
本文结合CeT 的应用场景,分析了影响其移动性能的主要因素,结合IEC 63281-3-2 研制过程,解析了其中涉及的9 个移动性能测试项目的测试方法。未来,伴随技术的成熟和立法的推进,道路场景的使用将对移动性能提出更多测试需求。此外,随着产品形态的多样化和应用场景的进一步细化,表征CeT 移动性能的指标和测试方法也需要不断丰富和优化,从而持续为制造商提供产品研发、优化和评估的依据,也为政府和监管机构制定相关法规提供数据参考。目前,IEC 63281-3-2 的测试项目已覆盖在楼宇或室外半封闭道路移动相关的所有典型的测试项目,可以为企业研发或第三方评定提供规范性的技术支撑。
猜你喜欢
大理大学学报(2022年11期)2022-12-26
机械设计与制造工程(2022年8期)2022-09-19
核科学与工程(2021年4期)2022-01-12
中国金属通报(2020年2期)2020-12-09
环境影响评价(2020年2期)2020-12-02
甘肃教育(2020年8期)2020-06-11
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
卫生职业教育(2014年20期)2014-05-16
电子设计工程(2014年9期)2014-02-27
