基于MSE/PVDF复合结构转速传感器的研究
2023-12-19 05:32居本祥周光银
仪表技术与传感器 2023年11期
居本祥,周光银,吕 冰
(1.重庆理工大学机械工程学院,重庆 400054;2.重庆大学生物工程学院,重庆 400044;3.青岛科技大学自动化与电子工程学院,山东青岛 266044)
0 引言
随着应用范围的拓展,转速传感器也发展出了众多的种类,典型的如磁电式、磁敏电阻式、霍尔效应式、光电式、电容式、电涡流式等[1-4]。
本研究探索将MSE的磁敏特性与PVDF的正压电效应相结合构建复合结构应用于转速传感器。MSE也可称为磁流变弹性体(MRE),是磁流变材料家族中具有代表性的成员之一,与其他磁流变材料不同的是MSE采用橡胶类材料作为软磁颗粒分散填充的基体,且同时具有磁流变材料响应快(ms级)、可逆性好、磁控性能强等优点[5-8]。PVDF作为一种半晶体聚合物,已有研究表明PVDF压电薄膜的压电系数远高于其他压电材料,且柔顺性好,质量轻,灵敏度高,频带宽,声阻抗低[9-11];因而近年来PVDF在结构健康监测、振动及力学传感等领域获得了越来越多的应用[12-14]。本文从工作原理与结构设计出发,以MSE/PVDF复合结构为核心的传感器敏感单元,在测试旋转磁场的激励下,通过MSE产生的磁致法向力作用于PVDF,激发其正压电效应,从而感知被测转速量。
1 传感器工作原理
1.1 MSE磁致法向力
MSE主要由硅橡胶基体与软磁颗粒组成,在预结构化作用下其内部的软磁颗粒呈现链状或柱状组织结构排列,结构的方向由预结构化磁场方向决定。已有研究证明:在外磁场作用下,MSE因内部颗粒组织结构间的作用将产生垂直于表面的磁致法向力,该力(FN)可表示为[15]
(1)
式中:S为MSE表面积;d0与d为相邻软磁颗粒初始及当前间距;φ为颗粒含量;ξ≈1.202;V为单颗粒体积;μ0与μm为真空及基体相对磁导率;Ms为饱和磁化强度。
本研究建立的MSE磁致法向力表征系统及测试结果如图1~图3所示。

图1 MSE磁致法向力表征系统

图2 测试夹具与电磁发生器结构图

图3 MSE磁致法向力测试结果
图1中可编程线性电源激励电磁发生器产生不同强度的测试磁场,直流稳压电源为力传感器提供激励电压,力传感器经变送放大器进行信号放大后通过数据采集卡记录并存储测试数据。由图2可知MSE测试样品被置于磁极及平行板夹具之间,并展示了电磁发生器的内部结构及磁路分布情况。
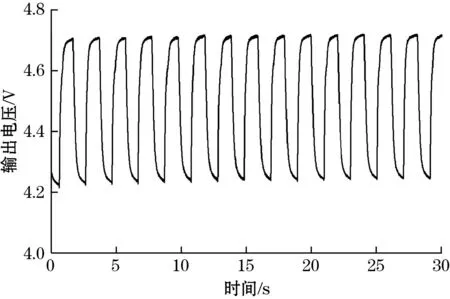
测试中设置了5 N的初始预压力以充分夹持样品,图3明确了MSE磁致法向力与测试磁场间的关系,即随着磁场的增强而增大,由于MSE内部结构中软磁颗粒沿磁场方向被极化,颗粒间产生强相互作用力,同时挤压周边橡胶基体,两者共同作用致使宏观表现为对外产生磁致法向力。在激励磁场达到500 mT时,法向力出现了磁饱和的现象,这与MSE磁滞回线测试结果表现一致。另外,通过可编程电源设置不同周期的方波励磁电压,产生占空比50%的方波激励磁场(幅值500 mT),得到的力传感器输出信号如图4所示。可知得到的响应输出电压与激励的变化趋势高度一致,表明MSE的磁致法向力具有良好的动态响应特性。
(a)测试间隔:1 s

(b)测试间隔:2 s

(c)测试间隔:5 s

(d)测试间隔:10 s图4 MSE在方波磁场作用下的力传感器输出信号
1.2 PVDF正压电效应
本研究中的复合结构利用了PVDF的正压电效应,其实验测试如图5所示。

图5 PVDF弯曲形变测试
图5在PVDF压电单元上通过镊子施加作用力使其发生动态弯曲形变,通过外部电荷放大及电压转换模块得到图6测试输出结果,显示正压电效应显著。形变时PVDF薄膜内部的正负电荷中心将发生移动,在其上下表面产生了极性相反、大小相等的束缚电荷。此时可把它看成两极板上聚集异性电荷,中间为电介质的电容器。期间当作用力消失后,电容迅速放电,薄膜再次恢复到电中性状态。
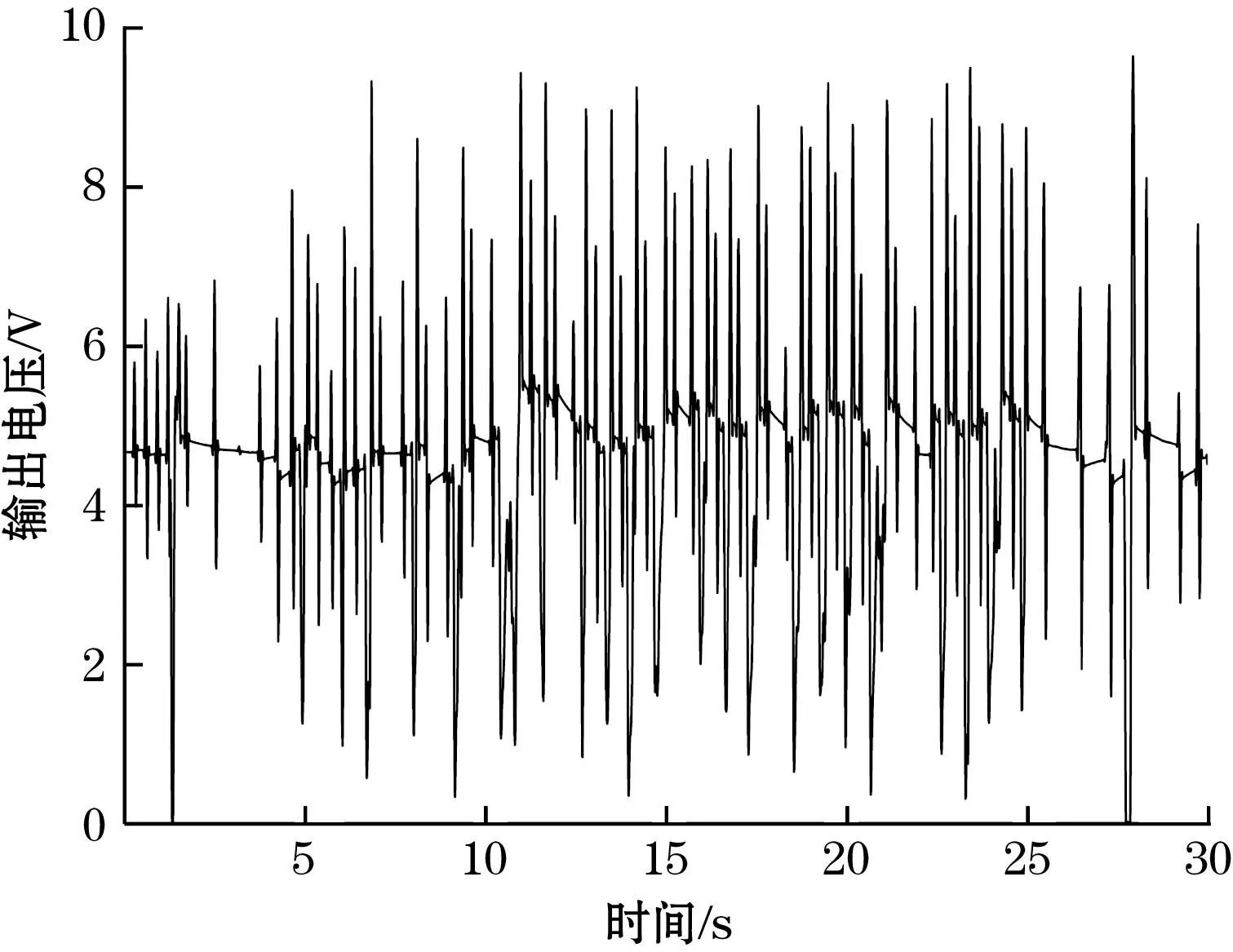
图6 PVDF压电单元测试结果
1.3 MSE/PVDF复合结构作用机理
敏感单元中复合结构的作用机理如图7所示。
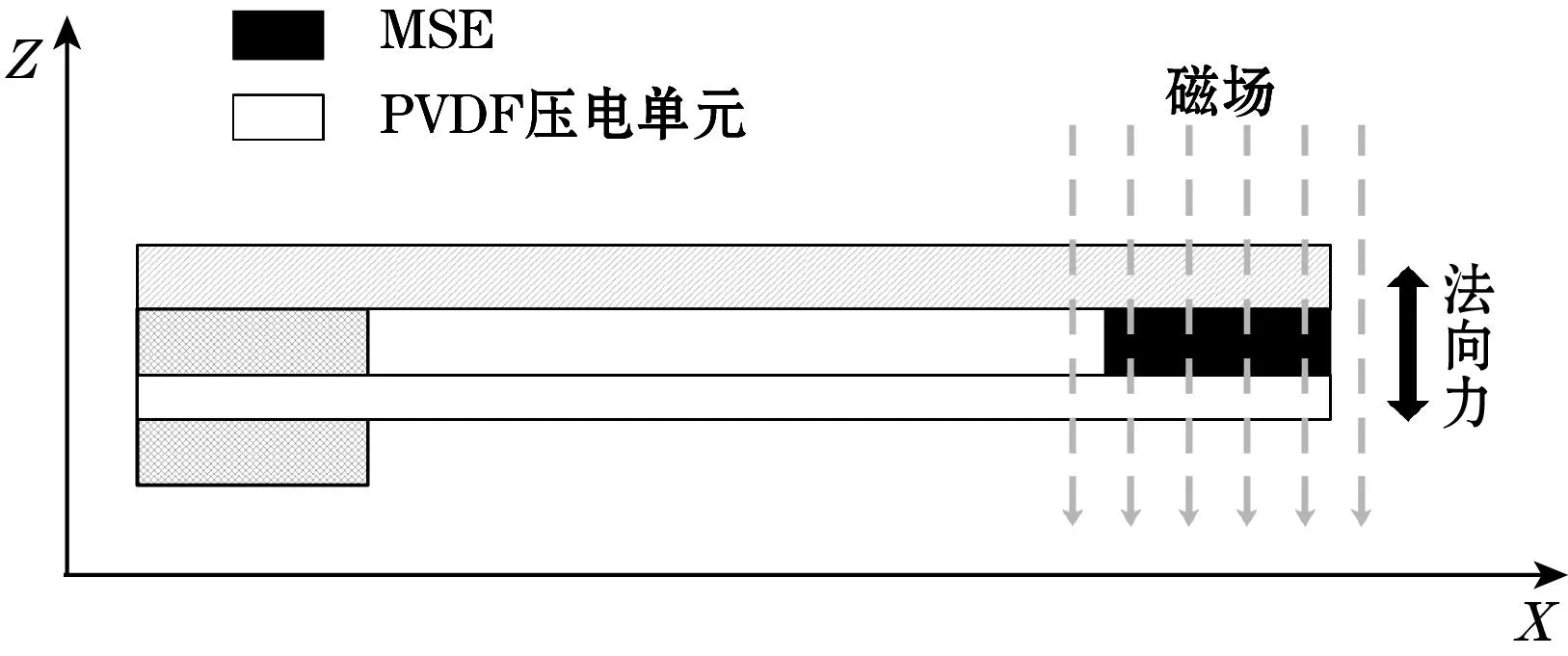
图7 复合结构作用示意图
在磁场作用下,MSE将产生磁致法向力作用于压电单元端部,使PVDF压电薄膜产生弯曲变形,PVDF压电薄膜的正压电效应将在X轴与Z轴方向上产生,根据第一类压电方程:
(2)

结合图7可知PVDF工作在d31与模式d33,引起的电位移D可简化表示为
D=d31σ1+d33σ3
(3)
式中:σ1与σ3为应力,由磁致法向力FN决定,即
(4)
式中:h、w、l分别为压电薄膜厚度、宽度及长度。
则产生的电荷为
(5)
式中A为其上下表面正对电极区域的面积。
压电薄膜在图8模型中可等效为一个电荷源,其中K为运算放大器的增益,Cc为电缆电容,Ca为压电薄膜电容,Ci为放大器的输入电容,Cf为反馈电容,由放大器的基本特性,可得输出电压(Uo)为
(6)
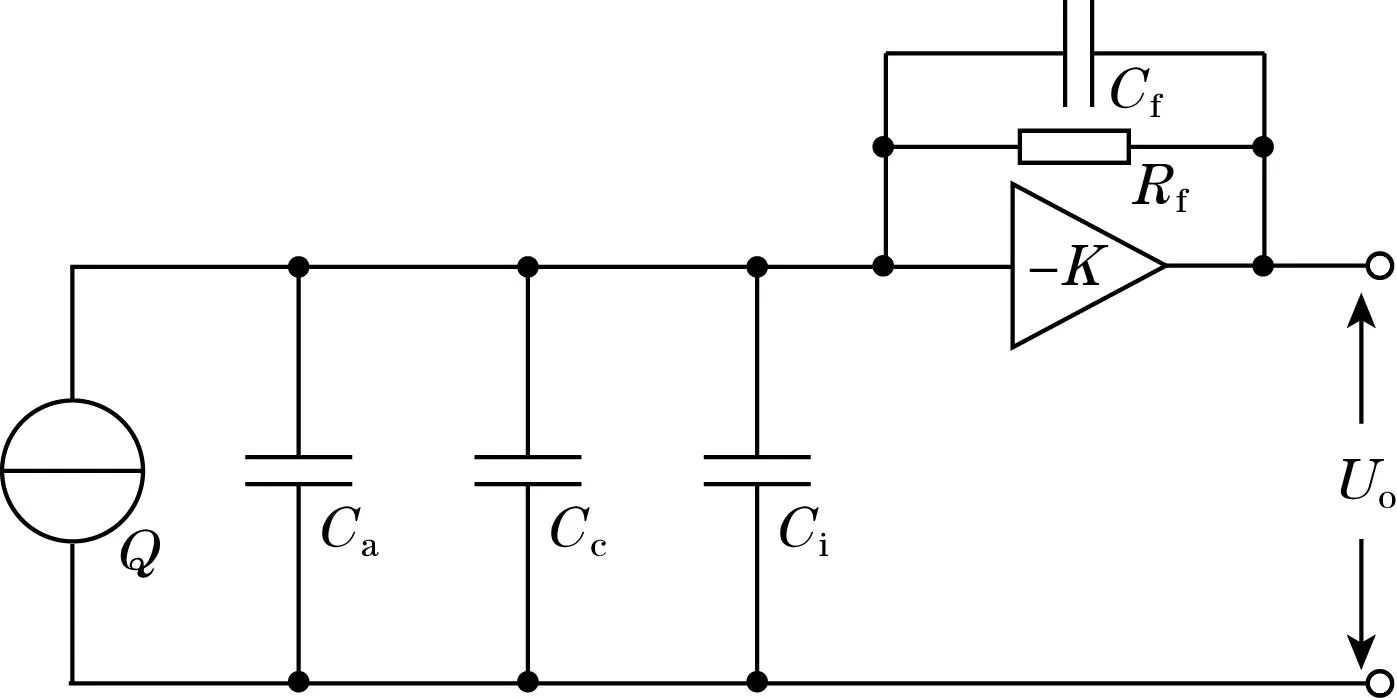
图8 等效电路模型
由于K一般取值很大,式(6)可简化为

(7)
结合式(5)综合可得:
Uo=GFN
(8)
(9)
当Cf为确定值,Uo不仅与压电薄膜产生的电荷成正比,且与磁致法向力之间存在线性关系。
2 传感器结构设计
2.1 磁敏材料MSE
MSE作为复合结构中的磁敏材料,基体采用双组分加成型室温硫化硅橡胶(型号:HT-9825,深圳宏图硅胶科技有限公司);软磁填充材料为羰基铁粉颗粒(型号:SQ,巴斯夫股份公司);在NdFeB永磁场(800 mT)中预结构化,样品尺寸为10 mm×5 mm×1 mm,软磁颗粒质量分数为60%。通过扫描电子显微镜(型号:Gemini360,卡尔蔡司股份公司)与振动样品磁强计(型号:8604,美国Lakeshore Cryotronics,Inc.)分别对MSE的微观结构及磁学性能进行表征,结果如图9与图10所示。

图9 MSE微观结构

图10 MSE磁滞回线测试结果
图9显示MSE内部软磁颗粒组织结构排列取向沿着预结构化磁场方向,图10中磁滞回线测试表明了激励磁场超过500 mT后变化明显放缓,甚至停滞,即出现了磁饱和现象。
2.2 PVDF压电单元
PVDF压电单元作为复合结构的一部分,其结构设计如图11所示。

图11 PVDF压电单元结构示意图
压电单元的核心部分采用厚度为28 μm的PVDF压电薄膜材料,使用导电银浆丝印工艺在压电薄膜的上下表面制作电极,通过压接方式分别在每个电极上引出一个接线端子。最后将上述元件粘接封装于聚酰亚胺绝缘薄膜内,既可以起到压电单元对外绝缘作用,又能有效保护PVDF与电极。
2.3 敏感单元设计
传感器的敏感单元结构示意图如图12所示。

图12 敏感单元结构示意图
在敏感单元中,MSE与PVDF压电单元组成复合结构,压电单元一端与上下固定块连接,形成固定端,另一端上表面与MSE下表面粘接,MSE上表面与上保护壳下表面粘接固定;上下固定块的外表面粘结在上下保护壳之间,上下保护壳将复合结构组件封装于其内部,对外仅引出一对引脚端子。
2.4 传感器主体结构
本文设计的基于MSE/PVDF复合结构转速传感器,其结构示意图如图13所示。

图13 转速传感器结构示意图
旋转支架通过3D打印技术制成,其侧面为U型结构,正方形凹槽设置在支架的上下两端,在凹槽中安装相同数量的永磁体,上端永磁体的N极正对下端永磁体的S极,形成稳定分布的永磁场,敏感单元被置于永磁场的两极之间,且与两极的间距相等;转速传感器主体结构分为动态组件与静态组件,其中旋转支架与NdFeB永磁体构成动态组件;相对于运动部件,敏感单元被设定为静态组件。
3 实验测试与结果分析
针对文中所提设计的转速传感器,建立相应的传感器实验测试系统如图14所示。

图14 传感器实验测试系统
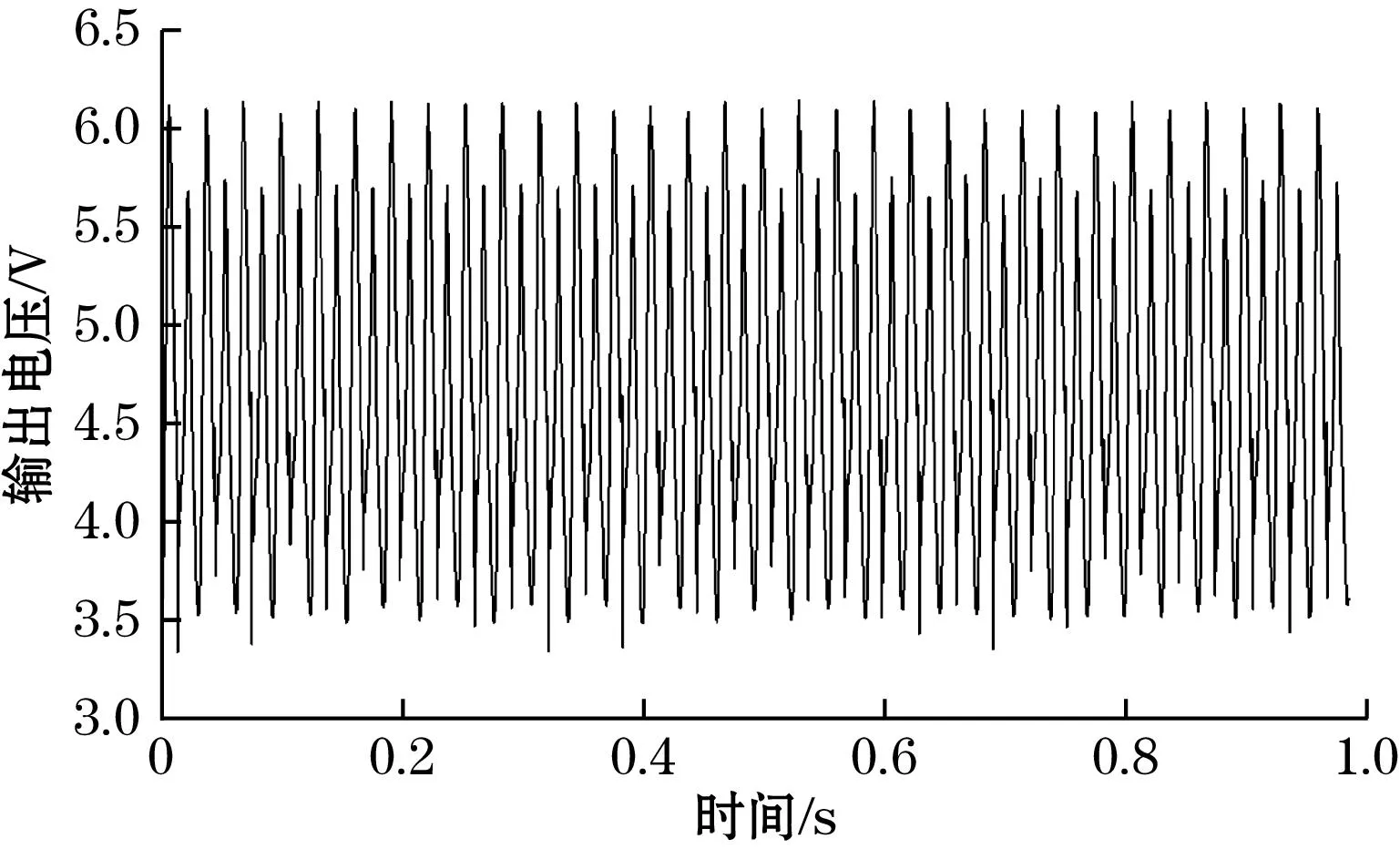
图中的旋转支架与永磁体构成动态组件与步进电机的转轴连接,敏感单元作为静态组件固定在磁极的中间位置,永磁场大小为470 mT,直流稳压电源-1为转换模块提供激励电压,直流稳压电源-2为电机驱动器提供驱动电压,电机控制器可控制实验所需的测试转速。PVDF压电单元两引脚与转换模块连接,可实现电荷放大与输出电压信号转换。为测试传感器的输出特性,设置电机的转速为480 r/min,传感器的时域输出信号如图15所示。
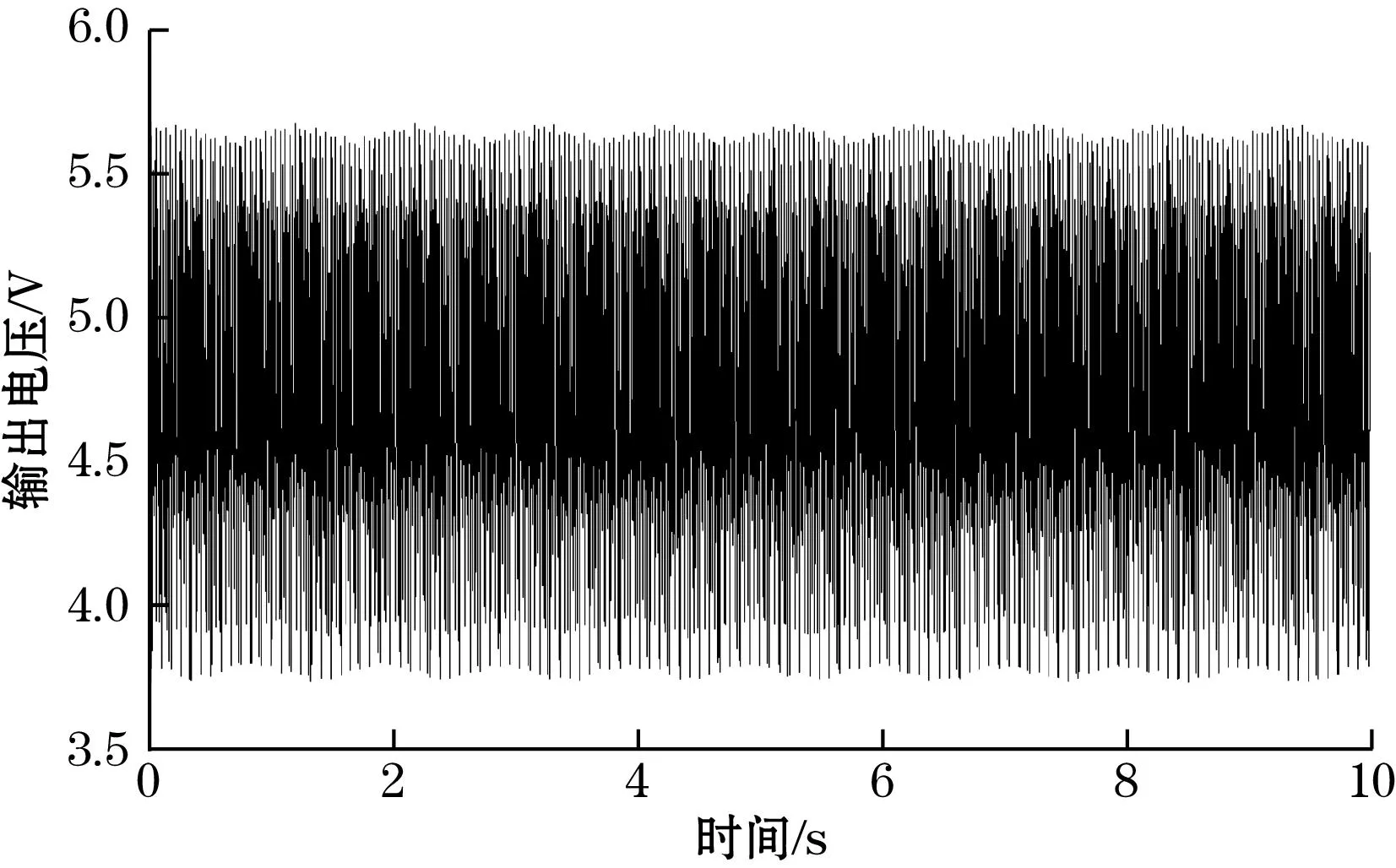
图15(a)是在周期性磁场激励下获得的传感器时域响应信号,输出信号呈现较一致的周期性变化特征,当敏感单元与永磁体位置重合时,MSE内部颗粒瞬间被极化产生磁致法向力,挤压PVDF压电单元弯曲变形产生正压电效应,传感器对外输出一个电压峰值信号;图15(b)是从图15(a)中提取的任一单周期输出信号,因为MSE是橡胶类基体,当永磁场远离敏感单元后表现出了典型的弹性回复特征,两峰值间的信号即为一个完整的输出周期,可求得时间间隔T=0.125 s。传感器只设计了一对永磁结构,电机转动一周即输出一个电压峰值信号,单位时间内输出电压周期性峰值数量即表示被测转速。由图15(a)可求得输出信号所表示的被测转速为480 r/min,与电机设置转速相吻合。为进一步测试对转速量的检测准确性,采用更高的测试转速与霍尔传感器的输出信号作对比,结果如图16所示。
设置测试转速为1 920 r/min,图16(a)为设计传感器的输出电压信号,通过提取每周期的电压峰值信号得到的峰值散点图如图16(b)所示;另外将相同测试条件作用于霍尔传感器获得的输出信号如图16(c)所示,该信号也表现出明显的周期性峰值特征,对其峰值提取所得结果如图16(d)所示,两传感器单位时间内的峰值点完全相同,说明所设计传感器可以准确表征被测装置转速量。
(a)MSE/PVDF传感器

(b)MSE/PVDF传感器峰值散点图

(c)霍尔传感器

(d)霍尔传感器峰值散点图图16 MSE/PVDF传感器与霍尔传感器输出信号对比
控制电机转速在480~1 920 r/min,研究在不同测试转速下传感器的信号输出情况,实验结果如图17所示。

(a)480 r/min测试结果

(b)960 r/min测试结果
(c)1 440 r/min测试结果

(d)1 920 r/min测试结果图17 不同测试转速下传感器的输出信号
以480 r/min为间隔的输出电压时域波形,在不同转速测试下均出现了与测试设定值相匹配的周期性峰值电压信号输出。随着被测转速的增大,传感器输出电压峰峰值出现了增长的趋势,不同测试转速相当于给MSE提供了不同频率的激励磁场,即软磁颗粒间将产生相应频率的磁作用力,硅橡胶基体受到周边颗粒的挤压作用,随着激励频率的提升,橡胶分子链回复运动难以跟随激励频率的变化,促使颗粒间结合更加紧密,对外产生更强的磁致法向力作用于PVDF压电单元,致使输出电压信号峰峰值增大,周期峰值特征愈加明显,由此可见传感器对于中高转速具有良好的检测能力。
4 结论
本文提出一种以MSE/PVDF复合结构构建敏感单元核心的转速传感器,在分析工作原理的基础上设计传感器结构,并进行了实验测试,通过研究得到以下结论:组成传感器敏感单元复合结构的MSE磁致法向力在磁场作用下增长明显,并拥有良好的动态磁响应特性,且在500 mT时出现磁饱和;结合PVDF的动态弯曲形变输出,通过对比实验表明所研究的传感器具有与霍尔传感器完全匹配的输出电压峰值响应,且可实现对不同实验转速的准确检测;不同测试转速实验结果证明该传感器可有效针对中高转速量的检测。
猜你喜欢
少先队活动(2022年9期)2022-11-23
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
压电与声光(2019年1期)2019-02-22
铜仁学院学报(2018年6期)2018-07-05
中学生数理化·高二版(2016年12期)2017-02-28
通信电源技术(2016年6期)2016-04-20
通信电源技术(2016年5期)2016-03-22
Coco薇(2016年1期)2016-01-11
振动、测试与诊断(2014年6期)2014-03-01