
雷达精细化功能级仿真建模
2023-12-18 08:20:40薛炳迪陈晋汶
雷达科学与技术 2023年6期
王 玲,张 燕,薛炳迪,陈晋汶
(空军预警学院,湖北武汉 430010)
0 引 言
预警雷达既担负着常态化空情探测任务,又肩负着战时关键敌情预警任务。在平时,要应对城市用频设备日益增加带来的大量无意电磁干扰;在战时,要应对敌方各类电子战装备的压制/欺骗组合、随队/支援复合、有源/无源结合的电磁干扰。这就需要雷达根据作战任务、空情态势、敌情变化及时作出调整,确保重要空情的准确性和连续性。为了检验雷达在不同部署条件下、不同电磁环境下和不同电磁进攻态势下的作战效能,必须构建精细化雷达系统功能级仿真模型,设置不同的作战想定开展蒙特卡洛仿真,根据仿真结果评估概率意义下的作战效能[1]。由于实装雷达测试面临作战场景构设难、测试时间长、遍历不同想定难度高等问题,采用仿真建模测试是一种行之有效的方式[2]。雷达仿真建模主要包含信号级和功能级两种方式[3],对于系统设计论证、大体系作战推演等研究,由于信号级仿真模型计算复杂度高、评估时间过长等问题,通常采用功能级仿真模型。但以往的功能级仿真模型存在精细度不够、精确度较差的问题,无法有效评估雷达能力,不能满足作战效能评估需要[4]。为此,本文针对雷达系统精细化功能级仿真建模仿真问题,提出了雷达检测处理模型、点航迹处理模型和行为模型的精细化功能级仿真建模方法,以逼近信号级模型的方式定量化计算目标信干噪比,使得仿真模型的动态特性与真实物理模型严格一致。
1 雷达系统运行流程
雷达仿真主要由波束调度、时序控制、目标检测和目标输出4 个部分组成。波束调度任务根据任务要求,自适应地调度雷达波束资源,计算波形参数,实现雷达时间和空间资源分配。时序仿真任务根据波形参数计算每个波束需要的时间,进行时间控制,从而控制每个波束需要的时间,实现雷达时间和能量资源的准确控制。目标检测任务是根据雷达系统参数计算波束与目标的交会情况,结合雷达威力模型,判断是否输出目标。目标输出任务是根据雷达的探测结果输出数据。
雷达仿真运行流程如图1所示。

图1 雷达仿真运行流程
2 雷达检测处理模型
雷达实际探测能力是考虑战场干扰、地球曲率等因素下雷达对目标的探测能力。雷达探测结果计算流程如图2所示。

图2 雷达探测结果计算流程
雷达检测处理模型主要包括无干扰雷达探测距离、压制干扰下雷达探测距离等。
2.1 无干扰雷达探测距离
根据雷达距离方程,计算无干扰条件下雷达作用距离为[5]
式中:Pt为发射机峰值功率,W;τ为脉冲宽度;Gt,Gr为发射天线增益和接收天线增益,dB,需换算为功率;λ为雷达信号波长,m;σs为目标散射截面积,为雷达天线方向图传输因子;D为雷达抗干扰改善因子;k为波尔兹曼常数,其值为1.38 ×Ts为接收机输入端等效噪声温度;C0为指定检测概率和虚警率下的恒虚警检测门限信噪比,dB,需换算为功率比;LΣ为雷达所有损耗的总和,dB,需换算为功率;Latm为电磁波在大气中传输的损耗因子。
根据Shnidman 方程[6-7],对于不同散射起伏目标,雷达在非相干积累处理时的检测信噪比C0可分为起伏信噪比Csw和非起伏信噪比Cnsw:
式中,pd为检测概率,N为脉冲积累数(N<40),参数η和C1,C2的计算公式参考文献[7]。
2.2 压制干扰下雷达探测距离
压制干扰通过辐射强噪声干扰信号,在雷达系统中,用干扰信号淹没目标回波,大幅降低目标检测概率。压制干扰样式可以是窄带瞄频干扰、宽带阻塞干扰、灵巧噪声干扰、梳状谱干扰等。在远距离支援干扰下,干扰信号一般从旁瓣进入雷达接收机;在随队支援干扰下,干扰信号一般从主瓣或第一副瓣进入雷达接收机。雷达接收到的干扰信号功率为
式中:PJ为干扰机峰值功率,W;GJ为干扰机天线增益,dB,需换算为功率;RJ为干扰机到雷达的直线距离,m;G'为雷达天线在干扰机方位的接收增益,dB,需换算为功率;B为雷达接收系统带宽;BJ为干扰机干扰信号带宽;LJ为干扰机发射损耗;Lr为雷达接收损耗;Lar为干扰信号的大气损耗。
雷达接收机输入端的干噪比为
雷达受噪声干扰下的副瓣自卫距离Rsj为
2.3 欺骗干扰下雷达探测距离
在密集假目标、虚假航迹等欺骗性干扰中,假目标参数与真目标参数在雷达的分辨单元内的形状非常相似,假目标干扰信号的功率被雷达信号接收处理系统以与真实目标回波信号一样的方式被积累。根据雷达方程,计算假目标信噪比雷达作用距离可按照下式推算:
式中:σ为假目标雷达截面积,m2;JSR为干信比,dB,需换算为功率比。
3 雷达点航迹处理模型
雷达点航迹数据处理模型接收检测处理模型输出的真实目标点迹和虚假点迹,通过点迹过滤尽可能抑制虚警点迹,通过点迹凝聚消除分裂点迹影响,再经过航迹起始、点迹关联、航迹跟踪形成目标航迹,点航迹处理流程如图3所示。
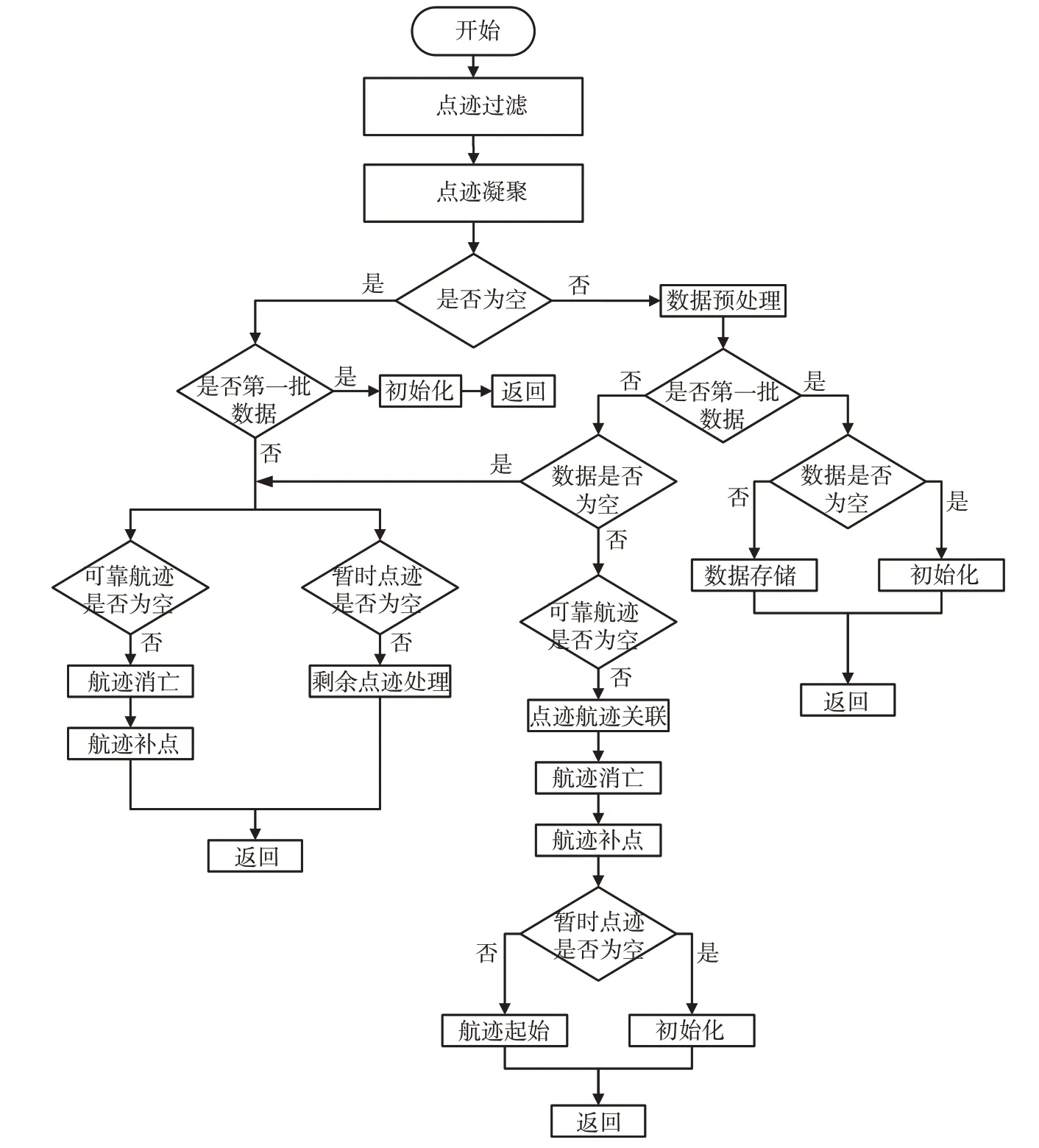
图3 点航迹处理流程图
3.1 航迹起始
航迹起始是一种建立新目标航迹的过程。在杂波和干扰环境下,点迹与现有航迹关联后仍有很多剩余点迹,这些点迹包括未建立航迹的真实点迹和虚假点迹。根据关联波门,将剩余点迹确定为假定航迹,利用后续扫描形成的剩余点迹与假定航迹进行波门关联。根据设定的关联规则,对于满足起批条件(比如连续三点起批)的航迹确定为真实航迹,并进行后续点迹-航迹关联和航迹跟踪滤波处理。
3.2 点迹关联
点迹-航迹关联是真实航迹接续和假定航迹确认的重要步骤,是根据凝聚后点迹与真实航迹、假定航迹关联的过程。由于雷达系统测量误差、噪声、杂波和干扰的影响,参与关联的点迹可能是虚假点迹,通过设定的关联规则,找出最佳关联点航迹对,当多批目标密集分布或目标处于杂波形成的多个虚假点迹附近时,可能出现多点迹与航迹间距小于关联波门,此时极易造成错误关联,导致目标跟踪失效。因此,关联规则的设定非常重要,常用的关联规则包括局部最近邻域法、全局最近邻域法等。局部最近邻域法点迹航迹关联在凝聚后的点迹与已形成的航迹之间进行,依次对每条航迹进行循环,查找与当前点迹关联上的航迹,并将点迹进行滤波后更新航迹。
3.3 航迹跟踪
航迹跟踪滤波的目的是对目标过去和现在的状态进行平滑,同时预测目标未来时刻的运动状态。滤波器作为雷达数据处理的核心部分,它对目标的量测进行处理,从而减少量测误差。
卡尔曼滤波是常用的跟踪滤波方法,采用递推处理非常适合计算机处理,但计算量仍然比较大,为了简化处理,可采用常增益滤波,如α-β滤波。在卡尔曼滤波中,增益K的计算占据了很大一部分计算量,为了降低卡尔曼滤波器的计算复杂度,α-β滤波算法中将增益设置为常量,常用取值方法如下[8]:
②常系数法:α=0.5,β=0.3;

表1 常用α、β随k的取值
4 雷达系统行为模型
雷达系统行为模型包括环境感知能力模型、抗干扰策略运用模型等,环境感知能力模型又包括干扰类型识别、干扰测向等。
4.1 干扰分类识别模块
干扰分类识别模块的功能是根据干扰的时域与频域特征,将其进行分类判别。干扰分类识别模块可以识别噪声压制干扰与密集假目标干扰,具体识别流程如图4所示。
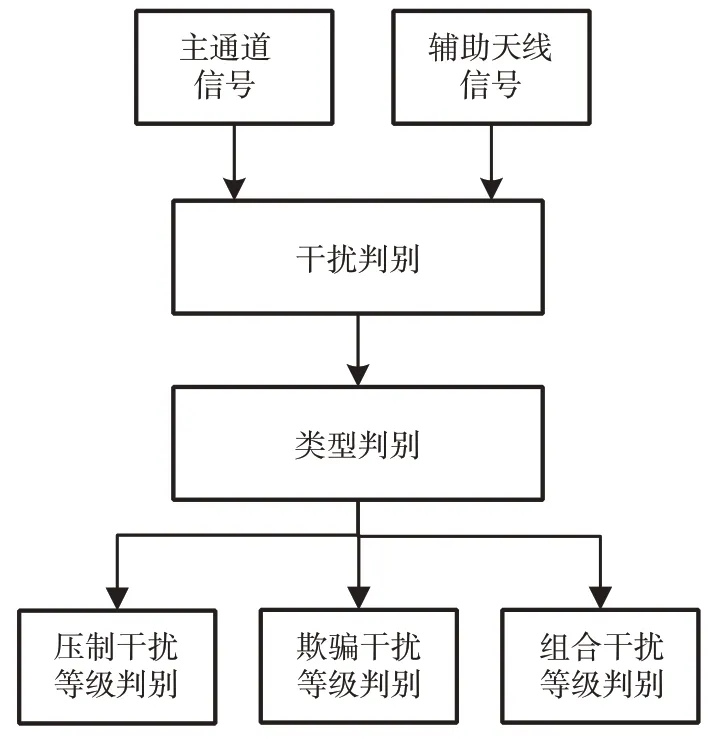
图4 干扰分类识别流程示意图
干扰分类识别模块的输入参数为接收机模型输出的主通道信号和辅助通道信号,通过比较主通道信号与辅助通道信号,判断是否受到干扰,如受到干扰则判别干扰类型;干扰类型判别根据辅助天线的信号强度以及匿影标志等信息,判定干扰类型为噪声压制干扰、密集假目标干扰或组合干扰;干扰类型判别后再根据干扰的强度值或密集程度判定干扰等级(I级、II级或III级)。
4.2 干扰测向模块
干扰测向模块的功能是根据主辅通道信号在时域上的关系,判别出干扰源的方位、仰角、干扰强度值以及干扰编号等特征信息,具体流程如图5所示。

图5 干扰测向流程示意图
为抑制副瓣对干扰测向的影响,如图6 所示,对辅助通道与和通道以及两侧参考脉冲干扰幅度进行比较,判断当前脉冲周期是否处于干扰源主瓣内。
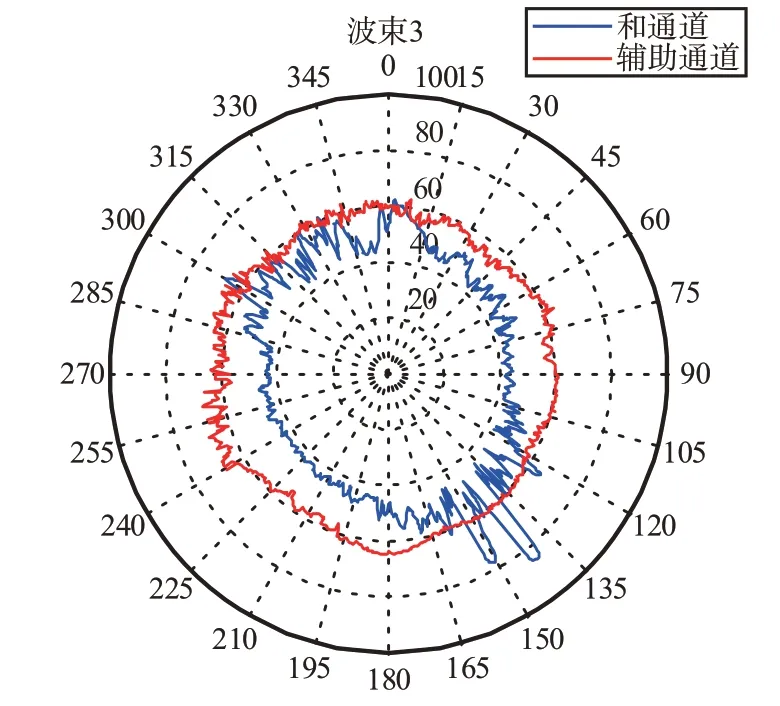
图6 某雷达主通道与辅助通道干扰功率比较
4.3 抗干扰控制策略建模
系统抗干扰控制策略的功能是根据干扰的不同类型、不同强度按一定准则调度高针对性的抗干扰措施,从而达到较好的组合抗干扰效果。将干扰特征信息作为输入参数(如干扰类型、干扰强度等信息),然后据此与抗干扰策略库中存储信息进行比对,寻找对应的抗干扰措施调用策略,并最终更具调用策略启动相应抗干扰措施。
模型中的抗干扰策略模块是将干扰类型与对应抗干扰措施建立映射表,即针对不同干扰类型拟定采取的抗干扰措施,某雷达抗干扰参考模板如表2所示。

表2 雷达抗干扰模板一览表
5 雷达效能评估模型
在压制干扰中,通常用雷达探测距离作为评估指标。在欺骗干扰中,通常用目标的信息损失构成评估指标,具体包括相对检测概率损失、受欺骗概率、跟踪误差等。
5.1 相对检测概率损失模型
以距离多假目标干扰为例,距离多假目标干扰可能带来两类影响:第一种情况下,若假目标没有落在真目标CFAR 参考单元内,不会影响真目标检测,只是可能检测到多个目标(包括真假目标),这对后续的数据处理等会产生影响。第二种情况下,当落入真目标的CFAR 参考单元内时,等效于提高了噪声功率,降低了综合信噪比,对目标检测会带来影响。
匿影门限的存在,导致检测概率pd的损失。定义检测概率损失为目标采用副瓣匿影后检测概率pd较未采用副瓣匿影时的检测概率损失。相对检测概率损失为
式中,pd表示未采用副瓣匿影时的检测概率表示采用副瓣匿影时的检测概率。
5.2 雷达受欺骗干扰时的受欺骗概率pf
仿真时第i个假目标使雷达受欺骗的概率记为pfi,则n个假目标时雷达受欺骗干扰概率pf为
5.3 雷达受欺骗干扰时跟踪能力评估模型
欺骗干扰条件下,雷达跟踪模型的输入参数项会相应变化,如点迹数量急剧增加、点迹强度增强。从而会导致落入跟踪波门内点迹数量增加,对波门内目标跟踪造成选取错误,最终导致真实目标的跟踪错误或者不能正常跟踪现象。
欺骗干扰时,点迹数量、点迹强度将作为模型的输入参数。点迹凝聚后数据发生空间偏移,当点迹与航迹相关处理后,极易出现航迹跑偏或漏点的现象。欺骗干扰条件下,目标航迹数为条,其中丢批航迹数为条、错批航迹数为条。
欺骗干扰条件下,模型输出平均错批数与平均丢批数等参数,用以衡量或显示受干扰程度。其中:
平均错批数为在tr(r=1,2,…,m)时段内,雷达错批数的时间平均
平均丢批数为在tr(r=1,2,…,m)时段内,雷达丢批数的时间平均
5.4 启动不同抗干扰措施时跟踪能力评估模型
启动抗干扰措施后,虚假点迹将被抑制,雷达终端点迹数、点迹强度将会降低至接近正常水平。模型将抗干扰措施的虚假点迹抑制比、目标损失概率作为输入参数,并根据其输出相应的平均错批数和平均丢批数等参数。
根据虚假点迹抑制比、目标损失概率可以模拟出措施后的丢批航迹抑制率Ky与错批航迹抑制率Kc,从而措施后的平均错批数N's与平均丢批数N'M定义为
6 雷达系统仿真实验
依托XSimStudio 仿真引擎,设计组件化雷达系统仿真模型,引入雷达阵地地形数据计算遮蔽角,设定典型雷达系统参数:
发射机峰值功率:500 kW
发射脉冲宽度:22µs
发射天线增益:35 dB
接收天线增益:38 dB
检测因子:8.5 dB
接收机噪声温度:25 dB
发射损耗:2 dB
电磁波传播损耗:2.5 dB
其他损耗:5 dB
目标反射截面积:2 m2
在无干扰条件下,雷达在阵地条件下对典型目标的探测威力如图7所示。

图7 雷达在无干扰条件下的探测威力
设定雷达收发方向图、干扰机系统参数和飞行航线,可仿真雷达受压制干扰下的探测威力,如图8所示。
依托电子战仿真模型,设计密集假目标干扰场景,在雷达采取措施前,形成大量虚假点迹,如图9 所示,采取副瓣匿影措施后,主要虚假点迹被抑制,仅在干扰机方位有一定虚假点迹剩余,如图10 所示,红线为干扰源指向线,指向线周围有少量虚假点迹剩余(绿色),这和副瓣匿影措施只能抑制副瓣点迹的特性是一致的。

图9 在欺骗干扰下的虚假点迹
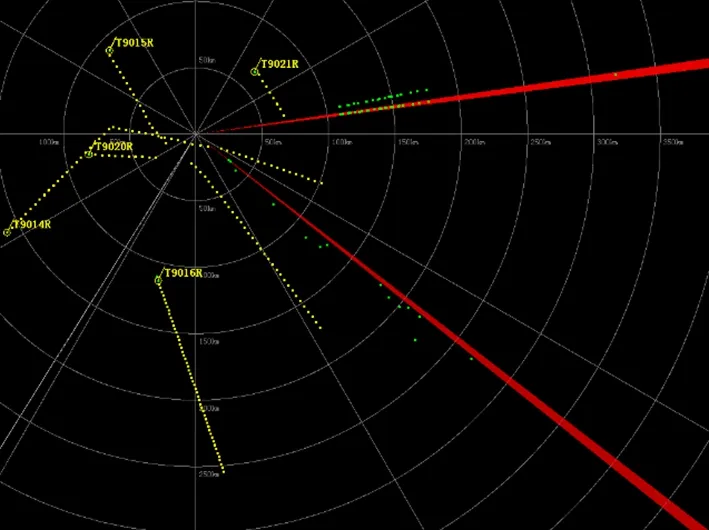
图10 在欺骗干扰下采取副瓣匿影后点航迹
7 结束语
本文针对预警雷达精细化功能级建模仿真问题进行了研究,在分析雷达系统仿真基本流程的基础上,提出了雷达检测模型、点航迹处理模型、行为模型和效能评估模型的建模方法,对压制干扰、欺骗干扰的建模进行了详细讨论,依托XSimStudio仿真平台,开展了雷达系统在复杂电磁环境下的仿真,有效验证了精细化功能级建模方法的有效性。这种兼具时效性、精细度的仿真建模方法,对于推演战术行动、演练战法具有重要意义。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18 07:31:04
北京航空航天大学学报(2021年9期)2021-11-02 08:24:24
中学物理·高中(2021年3期)2021-06-06 07:25:18
青年歌声(2019年12期)2019-12-17 06:32:32
火控雷达技术(2019年1期)2019-04-11 06:35:00
电子技术与软件工程(2018年9期)2018-02-25 06:21:08
电脑与电信(2018年11期)2018-02-16 05:41:36
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
中国科技博览(2017年31期)2017-09-20 07:56:08
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
