
一种临近空间高动态飞行器等离子鞘套自动判别方法
2023-12-18 08:20:44黄璐,王玥,张健,王洋,金胜
雷达科学与技术 2023年6期
黄 璐,王 玥,张 健,王 洋,金 胜
(北京跟踪与通信技术研究所,北京 100094)
0 引 言
临近空间高动态飞行器以超音速经过地球上空35~80 km 的大气层时,由于与大气层挤压、摩擦等强烈作用,飞行器本体周围气体的温度、压强迅速升高,使空气发生电离和电解,形成自由运动并相互作用的正离子、电子和中性分子组成的具有一定厚度的混合物,像剑鞘一样包裹在飞行器表面,称为等离子鞘套或等离子体[1-2],同时在飞行器本体尾部形成等离子尾流。由于鞘套对电磁波的吸收、折射和衰减作用,等离子鞘套及尾流的物理化学变化非常剧烈,导致飞行器目标的雷达散射截面积(RCS)等目标特性会随着目标速度、高度、空气密度、雷达频率而出现剧烈变化,同时等离子鞘套自身也会产生雷达回波,此时雷达回波不是单纯目标本体产生的回波模型,而是由目标本体与等离子鞘套共同产生的时变回波。鞘套包裹在目标周围,将影响目标的检测性能和测量精度,雷达跟踪性能也会随之降低[3-5]。因此,需对等离子鞘套进行自动判别,以便采用相应处理措施保证目标稳定跟踪。
本文提出了一种基于波形熵判别和变带宽确认的等离子鞘套自动判别方法。不同速度分量的鞘套散射由于距离多普勒耦合效应,脉压后分布在多个距离单元,呈现出群目标的回波特性,因此,鞘套判别需首先综合利用目标波形熵、包络长度等特征信息,进行群目标判别;除了出现等离子鞘套,目标分裂等其他因素也可能导致目标波形会表现为群目标的特性,引起波形熵出现多峰或展宽,因此在完成群目标判别的基础上,还需要对鞘套是否存在进一步确认,判断检测的多个点迹是鞘套还是多目标,因鞘套速度分布在一定范围,且有不同于目标本体的径向速度分量,在目标径向速度大于鞘套最大速度时,多普勒耦合造成目标与鞘套回波在距离维上发生扩展,经分析,鞘套的耦合距离与信号的带宽成反比,而两个真实目标的距离则与带宽无关,因此可发射不同带宽信号,通过检测回波的包络长度变化,对鞘套和目标进行判别。
1 等离子鞘套判别流程
等离子鞘套判别是在常规信息处理(包括脉压、目标检测和点迹提取)的基础上,进行特征提取和分析。首先进行基于波形熵的群目标判别,其次采用不同带宽的雷达信号实现鞘套的确认,等离子鞘套判别流程如图1所示。
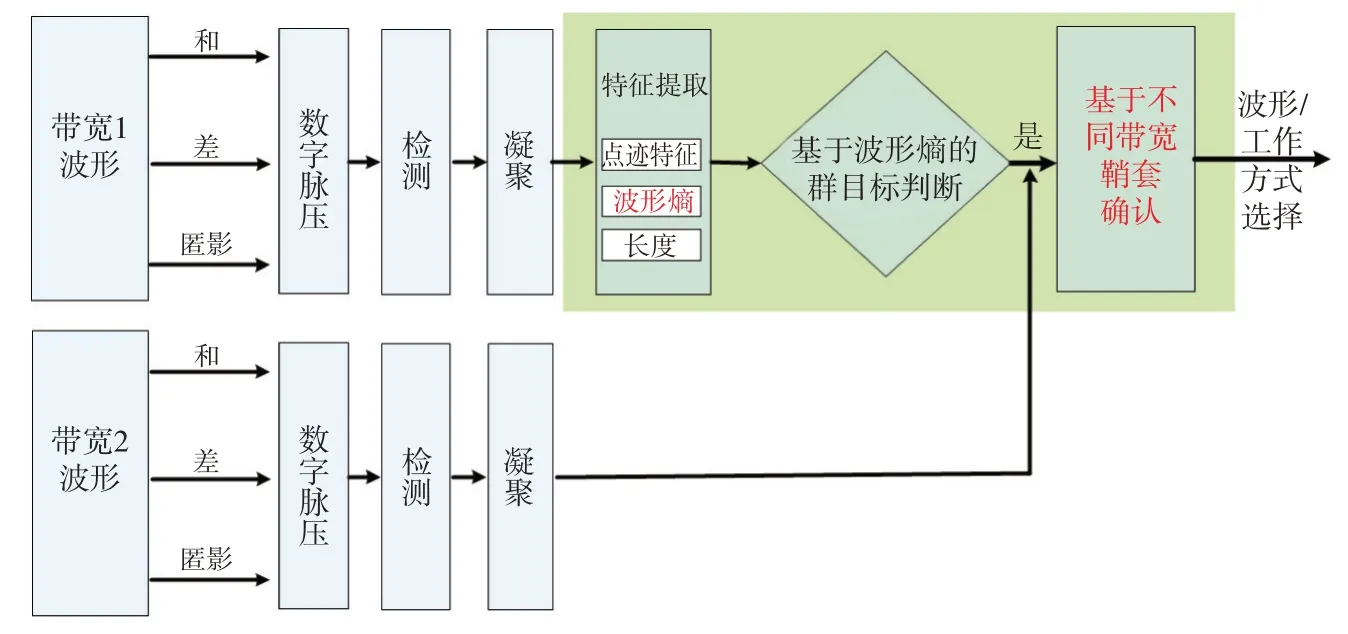
图1 等离子鞘套判别流程
2 基于波形熵的群目标判别
不同速度分量的鞘套散射由于距离多普勒耦合效应,脉压后分布在多个距离单元,呈现出群目标的回波特性,如图2 所示。因此,鞘套判别需综合利用目标波形熵、包络长度特征信息等,利用分类器进行群目标判别。
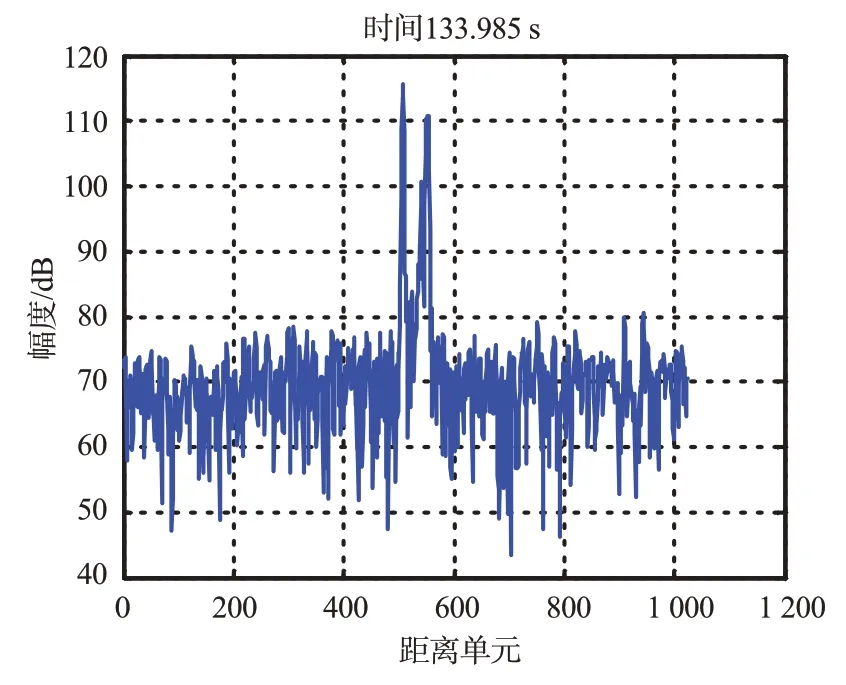
图2 含鞘套的目标距离向回波
2.1 波形熵特征
熵[6]描述了在某一给定时刻一个系统可能出现的有关状态的不确定程度。1948 年,Shannon 提出信息熵的概念,解决了对信息的量化度量问题。波形熵则是一种借用熵的概念来表征信号平稳度的物理量。
则序列x(n)的波形熵定义为
如图3所示,可以看出单峰和多峰的信号波形熵存在较大的差异性。从而可以利用波形熵来判断目标是否出现多峰。
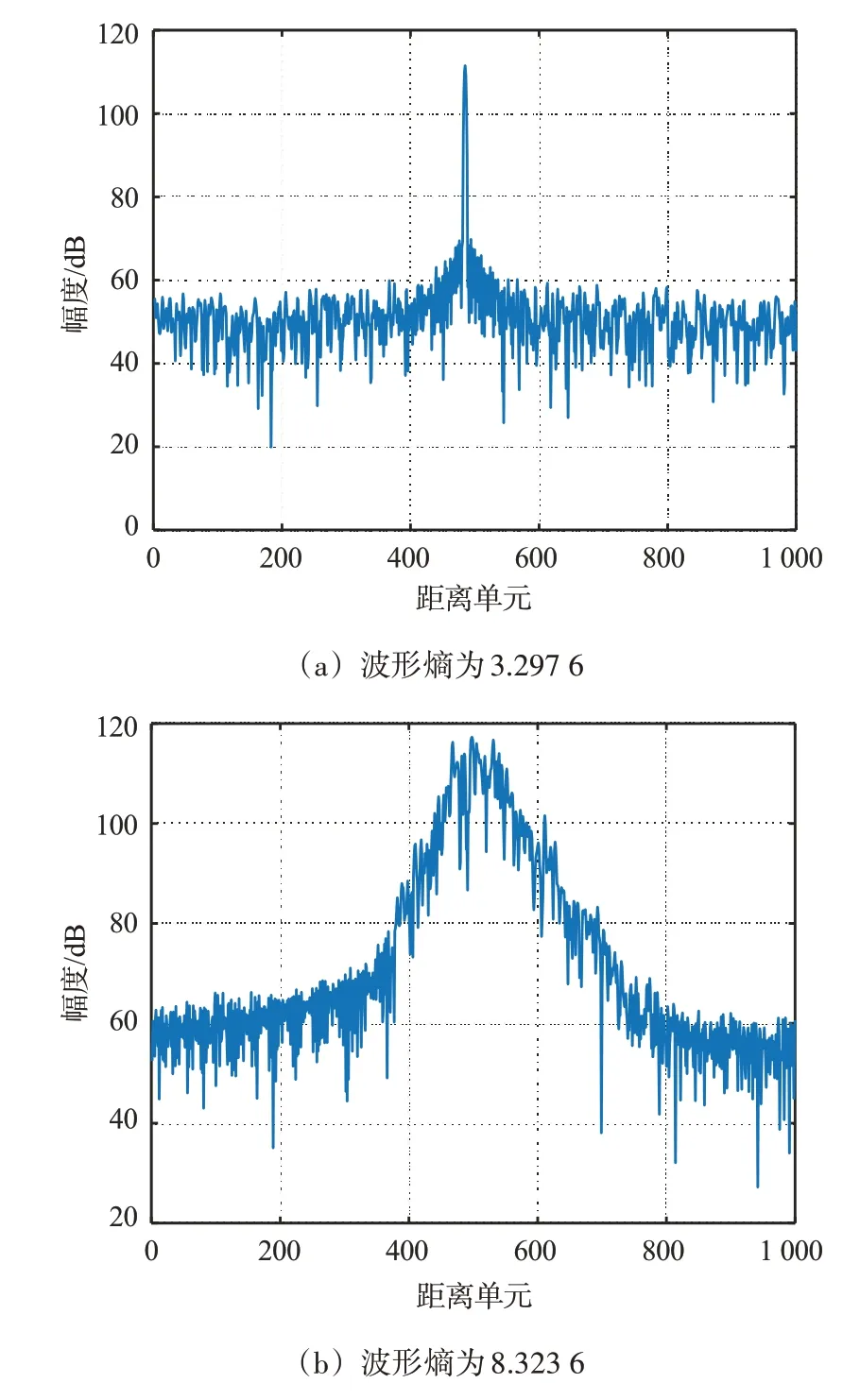
图3 单峰/多峰距离向回波波形熵
2.2 包络长度特征
目标的回波包络长度反映的是目标在雷达波束指向上的投影长度,当等离子鞘套产生时,目标回波将产生扩展,从而导致回波信号长度变大。长度提取处理包括回波距离窗内目标有无的判断和目标支撑域长度提取处理。
2.3 模糊分类器
利用波形熵、包络长度等特征获取目标群信息后,需利用分类器进行是否是群目标的判决。模糊理论是一种处理不精确性和不确定性信息的理论工具。采用模糊技术进行分类识别时,某特征属于某集合的程度由0 与1 之间的隶属度来描述。把一个具体的元素映射到一个合适的隶属度,由隶属度函数实现。根据隶属度函数的形状模糊分类器表现为不同的类型,目前最常见的有3种模糊分类器:超矩形、多面体形和椭圆形[7]。
在超矩形模糊分类器中,超矩形各表面与样本特征的主轴平行,它的最大优点是训练时间短,只需计算样本输入属性的取值范围。当各类样本的分布趋势与主轴平行时它具有较好的泛化能力。但是在高维情况下,即便是线性可分问题,该类分类器的识别率不高。在多面体模糊分类器中,多面体各表面用输入变量的线性表达式描述,可以克服超矩形模糊分类器存在的不足,但多面体需要从人工神经网络中提取,且训练神经网络时间比较长。椭圆形模糊分类器中,椭圆形状和位置由它的中心和协方差矩阵表示。对样本进行学习,可以获得椭圆的中心和协方差矩阵。大多数分类问题中,椭圆形模糊分类器的识别能力优于多面体模糊分类器和超矩形模糊分类器,规则的泛化能力也较高[7]。
椭圆型分类器的隶属度函数由高斯函数表示:
式中,μ表示特征向量均值,Σ表示特征向量协方差矩阵,可以通过最大似然方法对参数进行求解。
实际上,可以通过对单个特征的高斯函数进行加权得到多个特征的隶属度函数:
式中,xi为第i个特征,μi为第i个特征均值,也即模板中心,σi为第i个特征的均方根误差,也即模板宽度,wi为第i个特征置信度的权值。
利用上式就可以对各个识别方式的单个特征进行单独建模,估计特征的模板均值和模板宽度,再结合每个特征的权值就可以得到单识别方式的置信度。
3 基于不同带宽回波的鞘套确认
在完成群目标判别的基础上,需要对鞘套是否存在进一步确认,判断检测的多个点迹是鞘套还是多目标。其原理如下:
鞘套速度分布在一定范围,且有不同于目标本体的径向速度分量。在目标径向速度大于鞘套最大速度时,多普勒耦合造成目标与鞘套回波在距离维上发生扩展,扩展范围表示为
式中fd为目标与最低速鞘套的多普勒差,K为线性调频信号的调频率,c为光速。鞘套与目标散射在距离维的分布如图4 所示。则其对应的距离单元数为
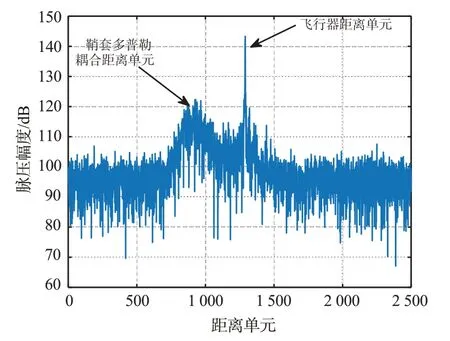
图4 目标与鞘套散射距离分布
式中τ为脉冲宽度。而两个速度相同的距离分别为R1和R2的刚体目标之间间隔的距离单元数为
从鞘套和目标及两个目标之间的距离分布对比可知,鞘套的耦合距离与信号的带宽成反比,而两个真实目标的距离则与带宽无关。因此,通过发射不同带宽信号,可以对鞘套和目标进行区分。通过仿真对该方法进行验证,仿真回波信号参数为:脉冲宽度为25 μs,带宽分别为5 MHz和10 MHz,目标位于900 km 处,目标运动径向速度为7 km/s,鞘套径向速度分布在0 m/s~4 km/s(比实际观测速度分布范围大,不影响分析结论),仿真验证鞘套和目标之间的距离变化,如图5所示。
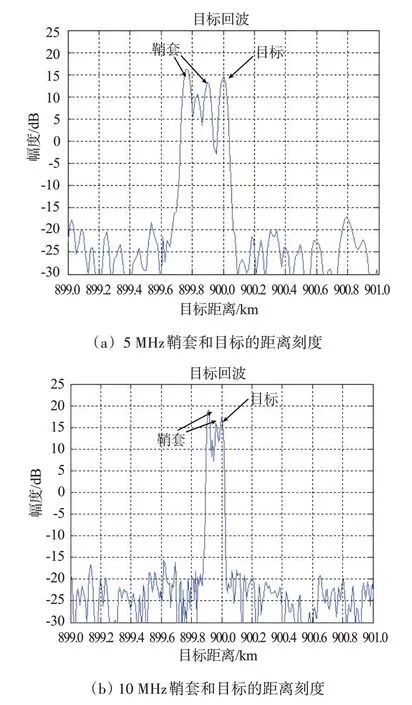
图5 不同窄带带宽回波的鞘套和目标的距离刻度对比
由图5 可知,在两种不同带宽下,鞘套与目标的分布距离范围相差一倍,而分布的距离单元数基本一致。因此雷达发射不同带宽信号,通过检测回波的包络长度变化,可以对是否存在鞘套进行确认。
4 结束语
临近空间高动态飞行器在高速飞行过程中与大气强烈作用,形成十分复杂的高温等离子鞘套,改变了目标的散射回波特性,给目标探测带来不确定性,需要及时判别当前飞行器是否处于等离子鞘套状态,但人为判别难度大,本文建立的针对临空目标等离子鞘套是否存在的状态自动判别流程,解决了人为判别难度大及主观局限性、时效性差等难题,经仿真验证有效,后续仍需实测数据进一步验证其可靠性和稳健性。
本文所提方法主要用于使雷达能够判别临空目标等离子鞘套的存在,便于采用对应的工作方式和处理方法,有效提升跟踪性能,属于提升临空目标跟踪性能的前提,在此基础上,后续可进一步研究针对临近空间高动态目标高速、高机动运动特性及鞘套存在条件下的目标检测跟踪方法。
猜你喜欢
红领巾·探索(2022年5期)2022-06-02 22:32:46
中华养生保健(2020年7期)2020-11-16 01:13:40
电子测试(2018年1期)2018-04-18 11:52:35
航空兵器(2017年6期)2018-01-24 15:00:10
农业与技术(2016年24期)2017-04-20 10:20:18
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
焊接(2016年1期)2016-02-27 12:57:53
中国卫生标准管理(2015年15期)2016-01-15 02:58:43
西安电子科技大学学报(2014年5期)2014-07-25 11:29:09
