达芬奇Xi机器人在单侧腋窝入路免充气甲状腺手术中的临床应用分析
2023-12-18 06:51史荣亮张婷婷倪兆娴王玉龙魏文俊卢忠武顾玮瑾嵇庆海
中国癌症杂志 2023年11期
史荣亮,张婷婷,王 宇,倪兆娴,2,王 慧,王玉龙,魏文俊,向 俊,渠 宁,卢忠武,范 鹃,顾玮瑾,,嵇庆海
1. 复旦大学附属肿瘤医院头颈外科,复旦大学上海医学院肿瘤学系,上海 200032;
2. 复旦大学附属闵行医院普通外科,上海 201199;
3. 复旦大学附属肿瘤医院手术室,复旦大学上海医学院肿瘤学系,上海 200032
2007年,Kang等[1]第1次将机器人手术应用于甲状腺,之后机器人甲状腺手术在全球范围内开展。机器人手术的入路种类繁多,其中双侧腋窝乳晕入路(bilateral axillary breast approach,BABA)和单侧腋窝入路在全世界范围内应用最广,各种手术入路各有优缺点:单侧腋窝入路由于受空间的限制,机械臂之间特别容易相互干扰,操作困难;BABA比较适合双侧的甲状腺病变,但对于单侧的甲状腺手术增加了手术创伤。随着新一代达芬奇Xi机器人系统在国内的临床应用,其机械臂较上一代机器人更加灵活,镜头臂可以任意互换位置,使机械臂在空间分布上更加具有优势,在减少甲状腺机器人手术机械臂之间的相互干扰、提高手术效率等方面可能具有较大优势,国内尚未见此方面研究报道。传统甲状腺手术因其使用的颈前入路横向皮肤切口,不可避免地会引起情绪、社会及医疗等问题,包括瘢痕形成、心理压力等。相比较而言,达芬奇机器人手术因其出色的手术稳定性、完整性及优良的美容效果而受到患者喜爱。因此,复旦大学附属肿瘤医院头颈外科从2020年3月起,开始探索达芬奇Xi机器人辅助下单侧腋窝入路在甲状腺手术中的应用价值,将传统手术与机器人手术的结果进行比较,评估了达芬奇Xi机器人辅助单侧腋窝入路甲状腺手术的优缺点,至2021年11月共完成此类入路95例,现总结如下。
1 资料和方法
1.1 病例资料
1.1.1 研究对象
本研究回顾性分析了复旦大学附属肿瘤医院头颈外科2020年3月-2021年11月由同一术者完成的186例单侧甲状腺癌根治术的临床数据,其中采用达芬奇Xi机器人手术者95例(机器人组),术前诊断均为单灶甲状腺微小乳头状癌(papillary thyroid microcarcinoma,PTMC)。选取同期同一组医师行传统开放手术的单侧甲状腺癌患者91例作为对照(开放组)纳入研究。两组患者均自愿接受该组手术并签署知情同意书。
1.1.2 纳入标准
① 初次手术;② 术前超声及计算机体层成像(computed tomography,CT)均未提示Ⅵ及颈侧区淋巴结转移,无明显外侵;③ 单发、单灶,病灶最大直径≤10 mm;④ 手术切除范围为单侧甲状腺叶+峡部切除+同侧中央区淋巴结清扫。
1.1.3 排除标准
① 甲状腺手术史或颈部放射治疗史;② 术前超声及CT检查提示明显肿大或明确转移的淋巴结;③ 临床病例资料部分缺失或术后失访。
1.2 方法
1.2.1 手术准备及方法
机器人组:患者全麻成功后,肩下垫枕,颈过伸位,头偏向健侧,患者上肢自然外展,体位及体表标志如图1所示,机器人腋窝手术的建腔方法同腔镜入路腋窝手术的建腔方案,不同的是我们对所采用的葛-郑氏拉钩进行了改良,提高了手术的效率(图2),建腔具体步骤可参照参考文献 [2-4]。建腔成功后安装达芬奇Xi机器人,装机完成后3个Trocar位置及拉钩相对位置如图3A所示,其中1号臂为抓嵌,2号臂为镜头臂,3号臂为能量器械(超声刀或分离钳),根据肿瘤情况可增加乳晕孔辅助操作,以减轻筷子效应,同时也可以减少对锁骨的损伤(图3B)。游离甲状腺外侧,超声刀凝闭离断甲状腺中静脉,在环甲肌上方游离喉前淋巴结,顺势向下游离甲状腺峡部并离断甲状腺峡部,显露甲状腺上极,充分游离甲状腺上极后超声刀凝闭离断上极,注意保护上极甲状旁腺(图4A),将甲状腺向上提,暴露并保护喉返神经(图4B),游离甲状腺下极,处理甲状腺下极血管,注意保护下极甲状旁腺,继续沿气管表面向内侧游离甲状腺,直至将甲状腺完整切除,完整清扫Ⅵ区淋巴结(图4C),对于右侧甲状腺手术需同时清扫Ⅵb区淋巴结,蒸馏水冲洗创面,手术野彻底止血后,留置引流管,关闭切口。开放组:手术取锁骨上窝切口5~6 cm,与机器人手术类似,按照常规步骤切除甲状腺,清扫Ⅵ区淋巴结。

图1 体位及体表标志Fig. 1 Body position and body surface symbol
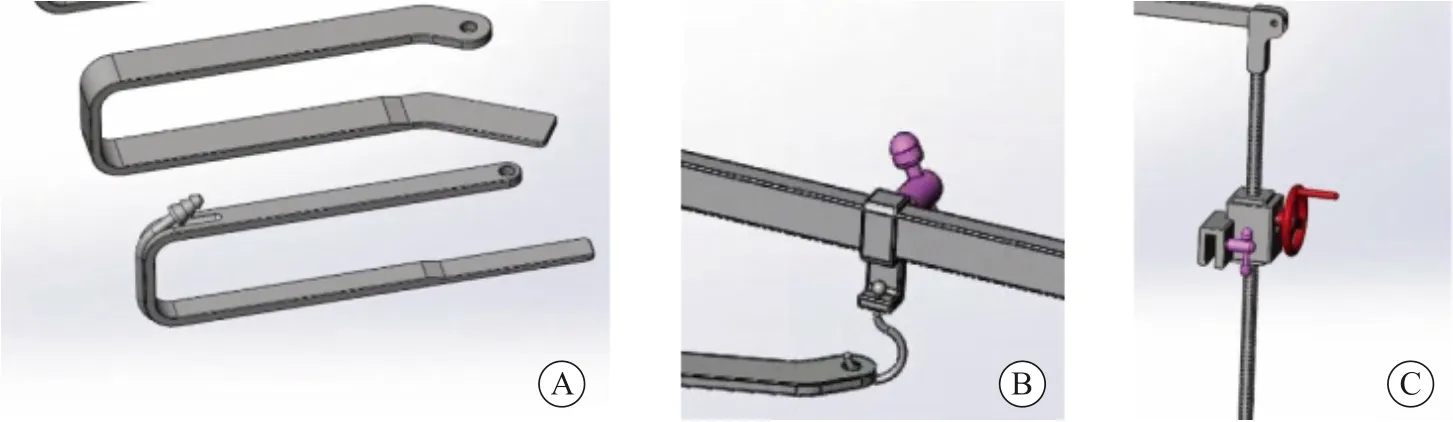
图2 改良拉钩的示意图Fig. 2 Diagram of the improved retractor
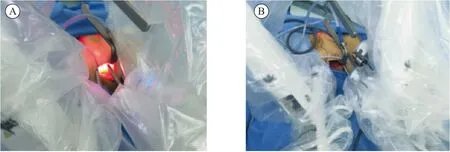
图3 装机示意图Fig. 3 Installation diagram

图4 经腋窝入路达芬奇Xi机器人甲状腺手术实例Fig. 4 Example of Da VinciXi robotic thyroid surgery via axillary approach
1.2.2 观察指标及评价标准
在手术安全性方面,术中观察指标主要包括手术时间和出血量,术后观察指标主要包括有无暂时性或永久性声嘶。在手术疗效方面以术后病理学检查报告为准比较清扫淋巴结个数与阳性淋巴结个数。术后随访调查患者切口满意度。完整的手术时间为自切皮开始至缝合切口完毕为止,术中出血量为引流量加纱布蘸血量(小纱布完全浸湿为5 mL)。通过门诊或电话随访(随访时间截至2022年5月)了解声嘶发生情况及术后患者满意度,若声嘶于术后6个月内恢复判定为暂时性,否则为永久性。术后其他并发症包括术后感染、术后出血、切口愈合不良及皮下气肿等。
1.2.3 时间序列图绘制
将所有病例按照手术日期先后顺序排列,以手术例数为横坐标,手术时间(min)为纵坐标绘制时间序列图。
1.2.4 累积求和分析(cumulative sum analysis,CUSUM)及拟合方程
CUSUM是一种序贯分析法,反映每个数据的离均差,在相对稳定的数据序列中,检测出开始发生异常的数据点,能更加直观地表示学习曲线[5-7]。将所有机器人组病例按照手术日期先后顺序排列,以手术例数为横坐标,CUSUM值为纵坐标绘制学习曲线散点图,采用SPSS 26.0软件对曲线进行拟合,拟合模型检验以P值判断,P<0.05表示拟合成功,以决定系数R2判断拟合优度,R2越接近1,拟合优度越高,选R2最大的模型为最佳拟合模型。以CUSUM拟合曲线的顶点为分界点,其所对应的横坐标为跨越学习曲线所需要累积的最低手术例数。CUSUM值采用如下公式计算,Xi表示每例患者达芬奇Xi机器人手术时间(min),μ表示平均手术时间,n为患者序号。
1.3 统计学处理
采用SPSS 26.0软件进行统计学分析。计量资料以±s表示;符合正态分布、方差齐时采用独立样本t检验,反之则采用Mann-WhitneyU检验。计数资料以频数或百分比(%)表示;组间比较采用χ2检验或Fisher确切概率法。等级资料组间比较采用Mann-WhitneyU检验。P<0.05为差异有统计学意义。
2 结 果
2.1 机器人组与开放组基线资料比较
机器人组与开放组基线资料如表1所示。机器人组男性13例,女性82例,年龄16~65岁,平均年龄为(35.72±8.85)岁,38例(40%)合并桥本甲状腺炎,肿瘤平均最大直径为(6.59±1.94)mm,54例位于甲状腺右叶,41例位于左叶。开放组男性17例,女性74例,年龄26~54岁,平均年龄为(37.70±7.51)岁,29例(31.9%)合并桥本甲状腺炎,肿瘤平均最大直径为(7.05±2.00)mm,57例位于甲状腺右叶,34例位于左叶。两组在性别、年龄、是否合并桥本甲状腺炎、肿瘤直径、病灶位置及中央区淋巴结转移率上差异均无统计学意义(P>0.05)。

表1 机器人组与开放组基线资料比较Tab. 1 Comparison of baseline data between the robotic group and the open group [n( %)]
2.2 机器人组与开放组手术结果比较
机器人组与开放组手术结果如表2所示,机器人组手术时间 (126.65±34.76)min]明显长于开放组[(60.99±21.12)min](P<0.05),手术费用也明显更高(P<0.05)。两组在术中出血量[机器人组:(20.48±18.83)mL;开放组:(16.15±13.95)mL]、清扫淋巴结总数[机器人组:(2.61±2.77)枚;开放组:(2.97±2.20)枚]及检出淋巴结个数[机器人组:(1.01±1.61)枚;开放组:(0.78±1.36)枚]方面差异均无统计学意义(P>0.05)。
表2 机器人组与开放组手术结果比较Tab. 2 Comparison of surgical results between the robotic group and the open group (±s)
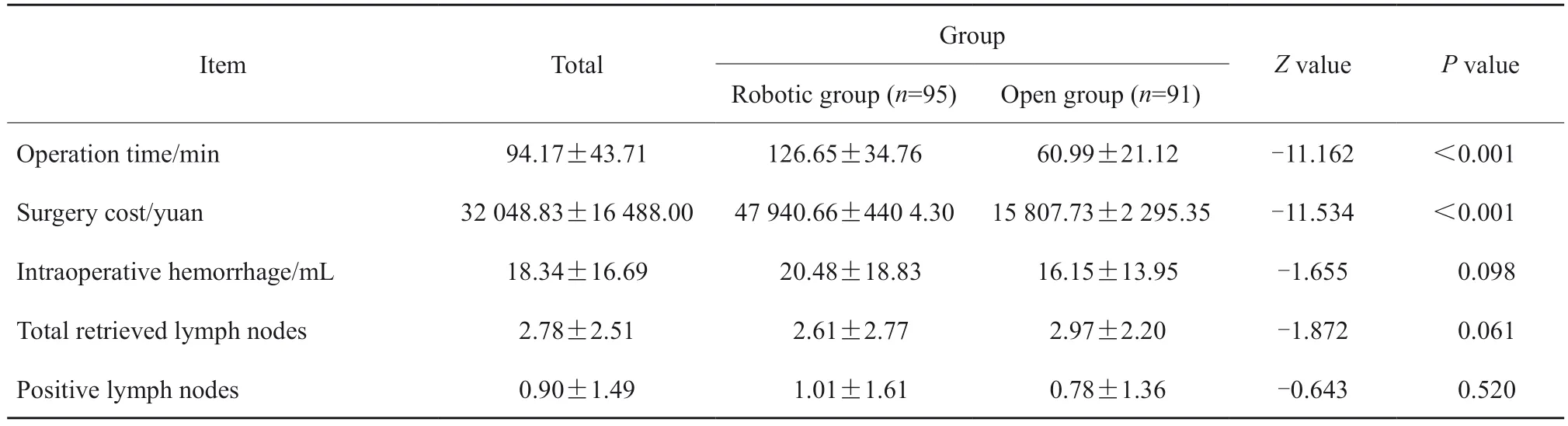
表2 机器人组与开放组手术结果比较Tab. 2 Comparison of surgical results between the robotic group and the open group (±s)
Group ItemTotal Z valueP value Robotic group (n=95)Open group (n=91)Operation time/min94.17±43.71126.65±34.7660.99±21.12-11.162<0.001 Surgery cost/yuan32 048.83±16 488.0047 940.66±440 4.30 15 807.73±2 295.35-11.534<0.001 Intraoperative hemorrhage/mL18.34±16.6920.48±18.8316.15±13.95-1.6550.098 Total retrieved lymph nodes2.78±2.512.61±2.772.97±2.20-1.8720.061 Positive lymph nodes0.90±1.491.01±1.610.78±1.36-0.6430.520
2.3 机器人组与开放组术后并发症情况比较
在术后并发症方面,机器人组术后暂时性声嘶发生率(1.10%)低于开放组(2.20%),两组暂时性甲状旁腺功能减退基本相同,差异均无统计学意义(P>0.05,表3)。另外在机器人组观察到2例其他并发症,包括1例切口愈合不良和1例颈部皮下气肿,差异均无统计学意义(P>0.05)。
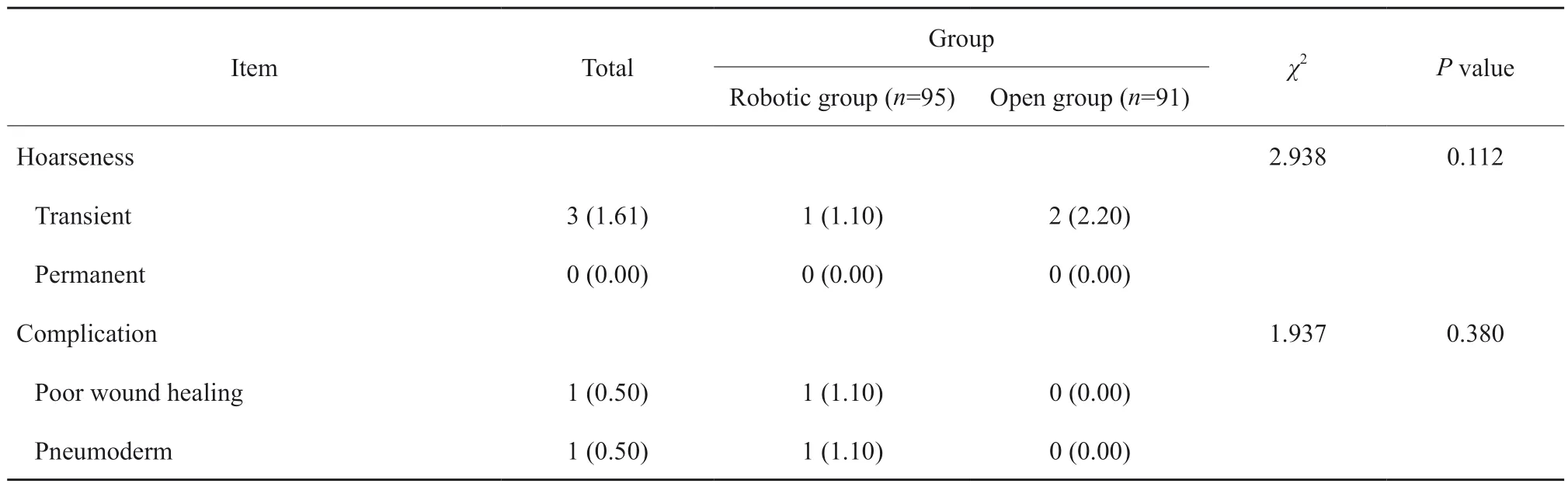
表3 机器人组与开放组术后并发症情况比较Tab. 3 Comparison of postoperative complications between the robotic group and the open group [n( %)]
2.4 机器人组与开放组术后切口满意度情况比较
随访时间截至2022年5月,两组患者术后切口满意度存在显著性差异,机器人组术后切口满意度高于开放组(P<0.05,表4),其中非常满意者达87.40%。
2.5 达芬奇Xi机器人手术CUSUM学习曲线分析结果
达芬奇Xi机器人手术时间序列图显示如图5所示,手术时间随着手术例数的增加呈现整体下降趋势,可以观察到第30例左右达到了平均手术时间(126.79 min),但30例之后仍有超过平均值者,故使用CUSUM计算所有例数的手术时间,相较于平均值的波动,这样可以更为准确地判断学习曲线的变化情况。
根据手术时间绘制的CUSUM曲线如图6所示,随着手术流程的改进和技术的不断熟练,在第36例时CUSUM(手术时间)达到峰值,表明36例为跨越学习曲线熟练进行达芬奇Xi机器人手术所需累积的最低例数。
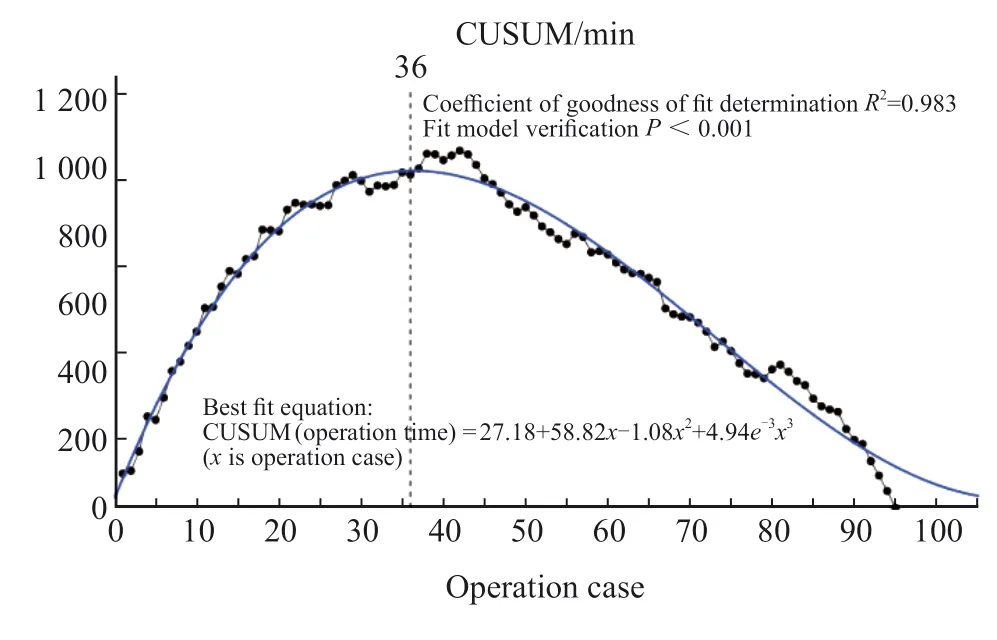
图6 95例达芬奇Xi机器人手术CUSUM学习曲线Fig. 6 CUSUM learning curve of 95 cases of Da Vinci Xi robotic surgery
3 讨 论
甲状腺癌是全世界近年来增长最快的恶性肿瘤,90%以上患者均为乳头状癌,大部分患者经规范化治疗后预后良好。随着医学模式转变为生物-心理-社会模式,患者对疾病治疗的要求随之提高,特别是低危甲状腺乳头状癌(papillary thyroid carcinoma,PTC)患者多为年轻女性,在治愈疾病的同时,要最大程度地满足患者的美容要求,因此腔镜下甲状腺手术应运而生。最早于1997年Hüscher等[8]将腔镜技术用于甲状腺外科手术治疗,自此腔镜技术在甲状腺外科领域得到了长足的发展。随着技术的进一步发展,2007年Kang等[1]第1次将机器人系统应用在甲状腺外科领域。相比腔镜技术,机器人手术系统有着高清三维放大视野、操作者不易疲劳、7个方向自由度的模拟人手腕/内手腕功能以及可以过滤手部震颤等优点,在全世界范围内得到了推广,新一代达芬奇Xi机器人系统在手术臂的设计上较上一代机器人更加灵活,镜头臂可以随意切换,使得机械臂在空间分布上更具优势,对于狭小间隙的手术更加适用。在手术入路的选择方面,机器人手术基本沿袭了腔镜技术的手术入路,每种手术入路各有其优缺点,本研究利用达芬奇Xi机器人系统机械臂更加灵活的特点,采用单侧腋窝入路免充气机器人甲状腺手术应用于cN0期PTMC患者,评估其与传统手术在手术费用、手术安全性、肿瘤根治性及美容效果等方面的差异,探索机器人手术在甲状腺癌根治术中使用的可行性。
Lee等[9]报道,在淋巴结检出率方面,机器人手术优于腔镜甲状腺手术,Kim等[10]报道,机器人手术在手术彻底性方面等同于开放手术而优于腔镜手术,而在淋巴结检出方面三者之间无显著差异。本研究中机器人组中央区淋巴结转移率为41.1%(39/95),开放组转移率为39.6%(36/91),机器人组和开放组在清扫淋巴结数量、转移淋巴结数目及中央区淋巴结转移率方面差异无统计学意义,达芬奇Xi机器人手术与传统手术效果相近。
在手术安全性方面,美国甲状腺协会(American Thyroid Association,ATA)及中国甲状腺外科医师委员会(Chinese Thyroid Association,CTA)对于甲状腺癌机器人手术做了相应的推荐并规范了应用[11]。在本研究中,95例接受达芬奇Xi机器人手术的患者均未中转开放手术,同时在术中出血、术后声嘶等方面与开放手术并无显著差别,达芬奇Xi机器人经单侧腋窝入路免充气手术安全可行。
在美容性方面,多项研究[9,12-13]显示,随着手术后时间的延长,机器人及腔镜手术在美容性等方面体现的优势越来越明显,而在术后疼痛、麻木及吞咽不适等方面,机器人手术、腔镜手术及开放手术三者之间无显著差异。本研究也发现机器人腋窝手术在美容满意度方面明显优于传统手术。
本研究表明,在完成36例机器人手术后,达芬奇Xi机器人腋窝手术完成时间可以达到一个稳定水平,表明其有学习曲线短、技术容易掌握的优点。
综上所述,达芬奇Xi机器人单侧腋窝入路在cN0期PTMC手术中应用具有一定优势,其肿瘤根治彻底性及手术安全性等同于传统开放手术,但较传统手术有更好的美容效果,学习曲线较短,操作易于掌握。但本研究为单中心数据,具有一定局限性,仍需要多中心大量病例长期随访数据及随机的临床研究进一步验证。机器人手术的一个重要缺点是患者必须支付额外费用,但笔者认为,机器人手术将是甲状腺美容手术的重要方向之一,随着国产机器人的陆续上市,其费用有望逐渐降低,优势将会逐渐显现。
利益冲突声明:所有作者均声明不存在利益冲突。
猜你喜欢
中华骨与关节外科杂志(2022年1期)2022-08-31
中老年保健(2021年11期)2021-08-22
文苑·感悟(2019年12期)2019-12-23
文苑(2019年23期)2019-12-05
读者·校园版(2019年17期)2019-08-13
益寿宝典(2018年5期)2018-01-28
作文周刊·小学二年级版(2017年6期)2017-07-12
保健与生活(2017年11期)2017-02-26
中国卫生(2016年6期)2016-11-23
中国卫生标准管理(2015年7期)2016-01-15