
激光雷达扫描仪快速标定方法的研究
2023-12-14 12:16孟凡光李智杰张涌泉高振涛
自动化仪表 2023年11期
孟凡光,李智杰,张涌泉,高振涛
(中冶东方工程技术有限公司,山东 青岛 266000)
0 引言
目前,激光雷达扫描仪的应用范围越来越广,尤其在自动化等领域[1]。这促使研究人员对其关键技术进行深入研究。激光雷达扫描仪的标定作为其应用的关键点之一,也得到了广泛的研究。
现有标定方法以2D工业相机标定原理[2]和手眼标定法[3]为基础,变换激光雷达扫描仪位姿,在多姿态下对标准标定物进行扫描,利用点云配准原理[4]求解各姿态间的变化关系,由此建立激光雷达扫描仪标定参数矩阵。何彦兵提出粗精配准相结合的配准标定方法[5]。粗配准基于3D-HARRIS算法和方向直方图特征描述子。精配准使用迭代最近点(iterative closest point, ICP)算法,实现了基于点云配准的激光雷达扫描仪标定。此类标定方法受点云配准算法精度以及速度限制,大多研究侧重于点云配准精度和速度的提升[6]。这种标定方法求解计算过程较为复杂,对点云配准算法精度、速度要求较高,且标定精度过度取决于点云配准精度,在实际工程应用中过于复杂,实用性不强。
为简化繁杂的计算过程与标定操作,以设备的机械尺寸、运动关系为基础的标定方法逐渐应用于生产现场。该标定方法抽取机械设备机构运动图,结合实际尺寸以及各构件间的相对运动关系,建立坐标转化模型[7]。该标定方法应用的前提是设备机械尺寸、激光雷达扫描仪安装位置已知,且设备安装与设计图纸一致。标定模型建立在设计图纸尺寸的基础上。对于大型设备,因安装误差较大,会导致最终标定结果精度差。
针对以上标定算法存在的问题,本文方法以全站仪标记点测量为基础,结合设备运动曲线,建立标定模型。该模型以设备运动参数为自变量,结合设备位姿检测传感器,可实时计算出当前位姿下的转化模型。本文方法操作简单、计算量小、适用范围广,特别对于大设备应用场景优势显著。经验证,本文标定模型精准度高,能够满足应用现场的生产需求。
1 标定原理
激光雷达扫描仪安装在运动机构上,随动实现扫描。借鉴激光雷达扫描仪在复杂机械设备上的使用场景[8],本文将激光雷达扫描仪扫描过程中的运动情况分为三种,分别为沿直线运动扫描、水平回转运动扫描、上下俯仰运动扫描。将三种运动情况组合,并将激光雷达扫描仪安装在执行机构末端,可实现三种情况的运动扫描。三种运动情况下的激光雷达扫描仪扫描方式可覆盖大部分应用场景,如行车带动激光雷达扫描仪扫描工件、传送带上工件传送检测、堆取料机无人化作业等。
1.1 标定坐标系及转化关系
激光雷达扫描仪坐标转换原理如图1所示。

图1 激光雷达扫描仪坐标转换原理
图1中,各坐标系释义如下。
Ow-xwywzw为全局坐标系,可作为最终参考坐标系。
OM-xMyMzM为激光雷达扫描仪测量坐标系。这是在激光雷达扫描仪表面人为选定的中间坐标系,用于测量标定。
OL-xLyLzL为激光雷达扫描仪固有直角坐标系,由激光雷达扫描仪厂家出厂设定。
OL-(L,γ)为激光雷达扫描仪固有极坐标系,由激光雷达扫描仪厂家出厂设定。
激光雷达扫描仪安装在设备上随动扫描,因此坐标系OL-(L,γ)为动坐标系。而Ow-xwywzw往往选一个定点作为其定坐标系。标定本质即求解从激光雷达扫描仪OL-(L,γ)(动坐标系)到Ow-xwywzw(定坐标系)的转化关系。
激光雷达扫描仪返回数据以OL-(L,γ)作为参考,转化为OL-xLyLzL下的数据。转化关系如式(1)所示。
(1)
式中:xL为OL-xLyLzL下的X轴坐标,mm;L为激光雷达扫描仪返回的距离值,mm;γ为激光雷达扫描仪返回的角值,rad;yL为OL-xLyLzL下的Y轴坐标,mm;zL为OL-xLyLzL下的Z轴坐标,mm。
假设(xw,yw,zw)为Ow-xwywzw下的坐标点、(xL,yL,zL)为OL-xLyLzL下的坐标点,则二者之间的转化关系可表示为如式(2)所示的齐次坐标形式。
(2)
式中:R为旋转矩阵;T为平移矩阵。
结合式(1)和式(2),激光雷达扫描仪极坐标下的数据以全局坐标系为参考,可表示为:
(3)
OL-xLyLzL到OM-xMyMzM的转换关系如式(4)所示。
(4)
式中:Tx为OL-xLyLzL与OM-xMyMzM在X轴方向的平移距离,mm;Ty为OL-xLyLzL与OM-xMyMzM在Y轴方向的平移距离,mm;Tz为OL-xLyLzL与OM-xMyMzM在Z轴方向的平移距离,mm。
矩阵A求解的关键为OM-xMyMzM与Ow-xwywzw间的转化关系。为简化求解过程,在激光雷达扫描仪选定点p1、p2、p3贴上反光贴。本文将全站仪架设在Ow-xwywzw的坐标原点,调整全站仪,使得全站仪测量坐标系与Ow-xwywzw重合[9]。本文以Ow-xwywzw为参考,可测得点p1、p2、p3的坐标为(xw1,yw1,zw1)、(xw2,yw2,zw2)、(xw3,yw3,zw3)。已知点p1、p2、p3在OM-xMyMzM下的坐标为(xM1,yM1,zM1)、(xM2,yM2,zM2)、(xM3,yM3,zM3),则此时问题可转化为已知N个点在两坐标下的坐标,求解两坐标变换关系。二者关系如式(5)所示。
B=R1×A′+T1
(5)
式中:B为Ow-xwywzw坐标系下N个点的坐标集合;R1为旋转矩阵;A′为OM-xMyMzM下N个点的坐标集合;T1为平移矩阵。
若N参数较大,则方程可能为超定方程,可采用奇异值分解进行求解[10-11]。求解关键过程如式(6)所示。
(6)

以全局坐标系为参考的激光雷达扫描仪数据可表示为如式(7)所示。
(7)
激光雷达扫描仪随着设备运动扫描,因此得到任意选定点p1、p2、p3在Ow-xwywzw下的坐标,即可完成实时转换。
1.2 全站仪测点标定求解过程
观察图1,若固定水平运动自由度,水平回转扫描时,p1、p2、p3轨迹为圆弧;同样,上下俯仰扫描时,p1、p2、p3轨迹为圆弧。对于空间中任意位置,若运动位置不变,则p1、p2、p3为球面上一点,且p1、p2、p3轨迹球面半径和圆心各不相同。
根据以上标定原理,标定测量流程如图2所示。

图2 标定测量流程图
球面轨迹坐标求解如图3所示。

图3 球面轨迹坐标求解示意图
求解过程为:先用全站仪测量在不同α、β角度下,点p1、p2、p3在Ow-xwywzw下的坐标;再用离散坐标值拟合球面[12],求得球心坐标Ow(xw,yw,zw)和半径r。其中:β为设备俯仰传感器返回的俯仰角度值,rad;α为设备回转传感器返回的回转角度值,rad。
在设备上加装回转角度、俯仰角度、走行位置探测传感器,并实时反馈结果,则在固定走行位置处,球面上任意一点坐标为:
(8)
在建立全局坐标系时,X轴与运动机构走行方向平行,则拟合的球心坐标(xw,yw,zw)与走行位置无关。
xw与走行位置相关,且呈简单线性关系,如式(9)所示。
xw=x+L
(9)
式中:x为设备当前位置,mm;L为常量,mm。
至此,本文已经求解出从激光雷达扫描仪极坐标系到全局坐标系的变化矩阵,完成了激光雷达扫描仪的标定。
2 试验验证
本文搭建试验平台。试验平台设备上下俯仰在±40°范围内,左右回转在±90°范围内。在俯仰方向,用全站仪采集每隔4°测量的一个拟合点。在回转方向,用全站仪采集每隔5°测量的一个拟合点。根据拟合坐标点集合,用最小二乘法拟合得到球面。拟合球体半径R=5 421 mm、圆心坐标为(1 280,2 126,529)。
为验证拟合精度,试验固定α=10°,β取值[-40,0],间隔5°移动设备,用全站仪测量实际值,以及用球体拟合计算理论值。激光雷达扫描仪标定误差如表1所示。
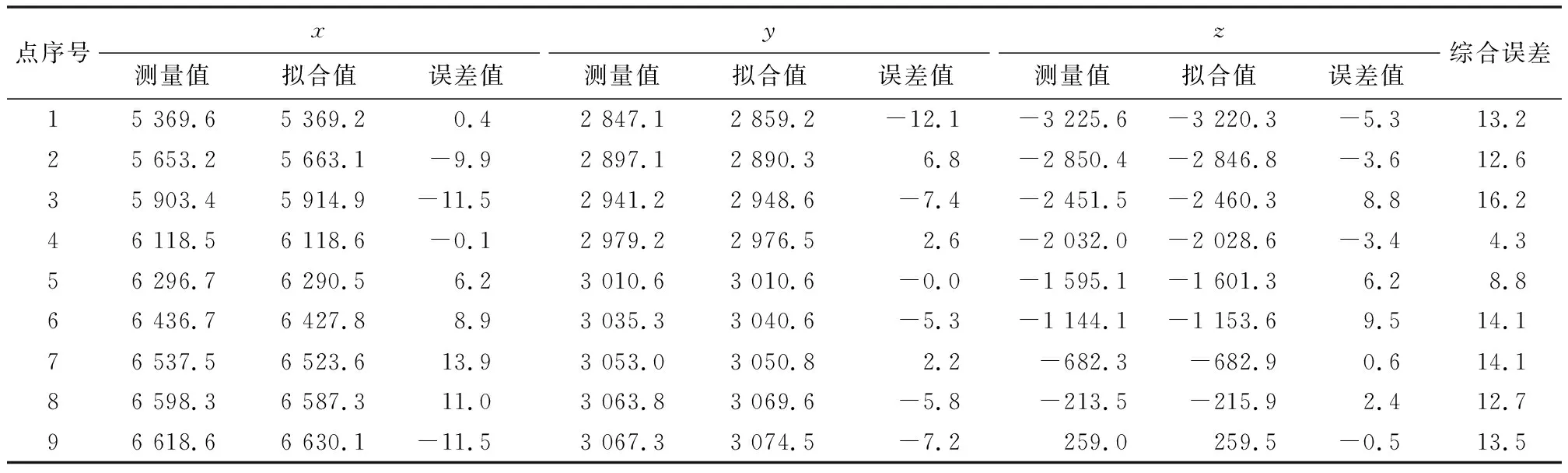
表1 激光雷达扫描仪标定误差
由表1可知,误差基本控制在20 mm以内,完全满足精度要求。现场验证如图4所示。

图4 现场验证示意图
斗轮堆取料机为冶金、煤矿、码头等领域中常用的设备。该设备机械尺寸较大,传统标定方法无法适应现场情况,因此本文选用冶金领域原料场斗轮堆取料机对本文标定方法进行验证。斗轮堆取料机包含走行、俯仰、回转三个自由度。本文将激光雷达扫描仪安装在斗轮堆取料机大臂末端,随着设备走行、回转、俯仰等基本运动来实现扫描。在全局坐标系(0,0,0)位置处放置一个尺寸为1 000 mm×1 000 mm×500 mm的 标准长方体箱子,用激光扫描仪随斗轮堆取料机运动进行扫描。
现场验证测量误差如表2所示。

表2 现场验证测量误差
由表2可知,测量误差均控制在±40 mm以内,满足冶金、港口、矿业等大生产场景下的扫描测量精度要求。
3 结论
本文提出基于全站仪测量法实现激光雷达扫描仪的快速标定,弥补了传统以点云配准算法为核心的手眼标定方式的复杂度高、现场可操作性差等缺陷。本文标定方法简单、计算过程简洁,在工业现场可操作性强,尤其是对于煤矿、冶金、码头等应用场景。这些场景中的设备大、现场环境复杂,手眼标定法不具备可操作性,而基于全站仪测量的快速标定方法在此类应用场景中优势显著。随着近几年的工业智能化发展,煤矿、冶金等传统行业亟需变革,激光雷达扫描仪应用需求广泛,具有广阔的应用前景。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
工程与建设(2019年3期)2019-10-10
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
电测与仪表(2016年9期)2016-04-12
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
河南科技(2014年22期)2014-02-27
河南科技(2014年5期)2014-02-27
