
基于激光扫描的航道水深快速测量技术研究
2023-12-12 14:58:48庄振禄
中国设备工程 2023年23期
庄振禄
(广州市四维城科信息工程有限公司,广东 广州 510000)
航道水深是指在水路交通中,为保障船只安全行驶所需的水深。航道水深的测量是水运事业发展的基础和保证,对于确保船只通航安全、提高航行效率和保护船舶及海洋环境等方面具有重要作用。过去的航道水深测量方式主要依赖人工测量和单点测量仪器,但这些方式存在测量效率低、测量精度不高、数据量少等缺点。因此,寻求一种高效、精确的航道水深测量方法已成为当今水路交通事业发展的重要课题之一。基于激光扫描的航道水深快速测量技术具有高效、精确、可靠等优点,能够有效解决传统测量方法的缺陷,该技术可以快速获取航道水深信息,并且测量结果精度高、数据量大,具有良好的可靠性和实用性。这种技术可以在实际应用中对航道水深进行高效、准确地测量,为航运业提供更加安全、快捷、高效的服务,提高整个水路交通的运输效益和质量。
1 相关技术原理
1.1 激光扫描原理
激光扫描技术是利用激光束在空间内扫描物体并记录其反射回来的信号来获取物体表面形状和位置信息的一种测量技术。其原理基于激光器发射激光束,经过光路系统的聚焦和反射后照射到被测物体表面上,被测物体表面反射的光信号经过接收器接收并转换成电信号,经过模数转换和信号处理后,可得到物体表面点的坐标和反射强度信息。激光扫描技术具有高精度、高速度、高分辨率等优点,常用于三维测量、工业设计和制造、文化遗产保护等领域。同时,其也面临如光强衰减、反射信号受杂散光影响、测量距离受限等问题。在航道水深快速测量中,激光扫描技术通过高速的激光扫描设备,可以快速扫描并记录航道表面的水深信息。通过数据采集和处理技术,将水深测量结果进行处理,可得到高精度的航道水深信息,具有快速、准确、高效的特点。
1.2 航道水深测量原理
航道水深测量是航道管理和水运安全的重要组成部分。目前,航道水深测量的主要方法包括单波束测深、多波束测深等(如图1 所示)。这些方法在实际应用中存在一定的局限性,例如,单波束测深范围窄、效率低、精度低,多波束测深成本高、对水下地形反应不够精细。为了克服这些缺陷,研究人员提出了基于激光扫描的航道水深测量技术。该技术通过使用激光扫描仪,可以实现对水面上每个点的测量,有效地解决了传统方法存在的测量范围窄、数据不足等问题。
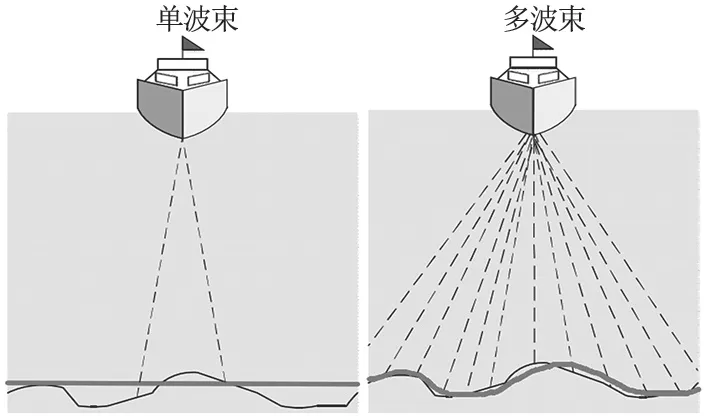
图1 单波束声波脉冲测量方式和多波束声波脉冲测量方式对比
1.3 基于激光扫描的航道水深测量技术原理
基于激光扫描的航道水深测量技术原理是,通过激光扫描设备对水体进行高精度扫描,获取水深数据并计算出航道水深的一种技术。具体来说,该技术原理是通过激光扫描仪将激光束发射到水体上,激光束经过反射后返回扫描仪,并由扫描仪接收到反射信号,进而计算出水体表面及水底的距离和高程信息。通过采集多个位置处的水深数据,结合地理信息系统等技术,可以构建出航道水深图,并对航道水深进行分析和预测。激光扫描测量水深的原理较为复杂,可以简单地描述,如图2所示。
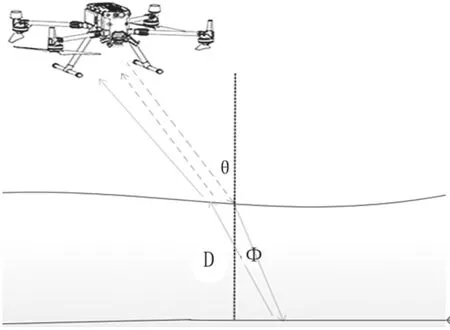
图2 激光扫描测量水深原理图
激光先到达水面时会反射一部分回波(蓝色虚线所示),到达水下时又会反射回波(绿色实线所示),通过测量两次激光回波的时间差(t2-t1)=△t,乘速度得到传播的距离S。假设激光入射角为θ,折射角为φ,海水折射率定义为n,海水深度为D。那么可得到水深D:
仅仅获得一个深度是不够的,还需要获得被测物体的三维坐标,因此由GNSS、IMU 测得飞机的三维坐标,加上深度值D 就可以获取我们水底的三维坐标了。激光水深的误差源从以上公式以及考虑海浪和潮汐等影响来看,主要的误差有回波时间测量误差、折射率误差、入射角测量误差、海浪测量误差、潮汐测量误差,最后,在水深测量时,还需要考虑海浪和潮汐影响因素。
该技术的优势在于具有高精度、高效率、非接触性和安全性等特点。与传统的水深测量方法相比,基于激光扫描的航道水深测量技术可以大大提高测量效率和精度,减少人力和物力成本,同时还可以避免传统方法可能存在的危险因素。因此,该技术将会被广泛应用于航道测量、水文监测、水利工程和海洋科学等领域。然而,该技术也存在一些缺点,例如,在强光下会受到干扰,同时需要考虑水体的透明度和水面波动等因素。因此,在实际应用中,需要进行充分的技术优化和数据处理,以提高技术的可靠性和实用性。
2 关键技术和方法
2.1 激光扫描设备的选型和参数设置
激光扫描设备是基于激光测距原理的测量设备,是实现基于激光扫描的航道水深快速测量技术的关键。在选型和参数设置方面,需要根据实际测量需求和场地情况,综合考虑以下因素。
首先,是激光扫描仪的型号选择,需要根据测量范围和精度要求进行选择。目前,比较知名的有RIEGL VQ-880GH、RIEGL BDF-1 等。一般情况下,航道水深测量所需的扫描范围较大,因此需要选择具有广角扫描功能的激光扫描仪。同时,为了保证测量精度,还需要选择具有较高分辨率的仪器。其次,是激光扫描仪的参数设置,包括激光发射频率、激光功率、扫描速度等。激光发射频率的选择需要根据航道水深的测量范围和精度要求进行选择,一般情况下,选择高频率可以提高测量精度;激光功率需要根据测量距离和反射率进行调整,以保证接收到足够的反射信号;扫描速度的选择需要平衡测量精度和测量效率之间的关系,一般情况下,选择适中的扫描速度。最后,需要考虑激光扫描仪的安装和校准问题,包括激光扫描仪与测量船之间的安装方式和安装位置、仪器坐标系的确定以及校准参数的设置等,正确的安装和校准能够保证测量的精度和可靠性。
综上所述,激光扫描设备的选型和参数设置是实现基于激光扫描的航道水深测量技术的重要步骤,需要综合考虑多种因素,以保证测量精度和可靠性。
2.2 数据采集与处理方法
在基于激光扫描的航道水深快速测量技术中,数据采集与处理是非常关键的环节。数据采集一般使用激光扫描仪进行,通过扫描航道表面,采集点云数据。采集的点云数据需要进行滤波和校正,以减少数据噪声和误差,提高数据质量。滤波算法一般包括高斯滤波、均值滤波、中值滤波等。其中,高斯滤波能够有效滤除噪声,但会造成数据平滑化,损失一些细节信息;均值滤波能够较好地平衡滤波效果和数据细节,是较为常用的滤波算法之一;中值滤波能够有效去除噪声同时保留数据细节,但在处理较大点云数据时效率较低。因此,不同的滤波算法需要根据实际情况选择合适的方法。
在数据处理方面,需要进行点云数据处理和水深计算。点云数据处理包括点云配准和拼接等。点云配准是指将多个采集的点云数据进行对齐,以减少点云数据的重复和遗漏,提高数据准确度。点云拼接是指将配准后的点云数据拼接成一整个点云,用于后续水深计算。水深计算需要根据点云数据的密度和距离等参数进行处理,一般采用插值算法进行处理。插值算法能够根据测量数据快速生成水深模型,同时提高数据的精度和稳定性。常用的插值算法包括三角剖分法、反距离权重法、克里金插值法等。不同的插值算法需要根据实际应用情况进行选择。因此,数据采集与处理是基于激光扫描的航道水深快速测量技术中不可缺少的环节。采集的点云数据需要进行滤波和校正,以提高数据质量;数据处理需要进行点云配准、拼接和水深计算,以获取水深模型。合理选择滤波算法和插值算法,能够有效提高数据的精度和稳定性。
2.3 水深计算方法
在基于激光扫描的航道水深快速测量技术中,水深计算是一个非常重要的步骤,其准确性直接影响着整个技术的测量精度和实际应用效果。因此,本文对水深计算方法进行了深入的分析。
水深计算方法主要涉及三个方面的因素,即激光扫描仪测量数据、水位高程数据以及相应的校正因子。首先,激光扫描仪能够获取到水面及水底各点的距离信息,通过将其减去水位高程数据,就可以得到每个点的水深。其次,水位高程的测量也是非常重要的,可以通过全球定位系统(GPS)、水位计等仪器进行测量。最后,由于激光扫描仪测量时受到多种因素的影响,如大气折射、仪器偏差等,因此需要进行校正。校正因子可以通过与现场实际测量的水深数据进行比对,从而得到。
在具体的计算方法上,通常采用的是均方根误差(RMS)最小化的方法。具体地,首先,通过获取的激光扫描数据和水位高程数据,建立三维坐标系,然后根据校正因子进行数据校正;其次,利用插值方法将离散的数据点插值成一定间隔的等间距点;最后,计算每个等间距点的水深,并采用RMS 最小化的方法对计算结果进行优化。该方法可以克服由于船舶行驶不规则带来的数据缺失和偏差等问题,从而提高了水深的计算精度。
需要注意的是,水深计算方法的准确性不仅受到各个因素的影响,还受到水体本身的复杂性的影响,如水流速度、水深变化等。因此,在实际应用中,需要根据不同的环境和需求,进行合理的数据处理和算法优化,以保证计算结果的准确性和稳定性。水深计算方法是基于激光扫描的航道水深快速测量技术中的关键环节之一。通过对各个因素的分析和优化,可以提高计算精度和稳定性,从而实现更加准确和实用的水深测量结果。
3 应用前景和推广价值
基于激光扫描的航道水深快速测量技术是一种新兴的水深测量方法,具有高效、高精度、实时监测等优势,并且具有广泛的应用前景和推广价值,将会成为未来水深测量领域的重要发展方向。
首先,该技术具有较强的实用性。适用于海洋测绘、航道管理、港口建设等领域,相比传统的水深测量方法,该技术无须直接接触水面,可以实现通航状态下快速、准确地获取水深数据,且测量精度高,适用于不同类型的航道测量,大幅度提高了水深测量的效率,减少了人工测量的时间成本。其次,该技术具有高精度的优势。通过激光扫描设备进行高精度的扫描和数据采集,可以实现对航道水深的高精度测量和计算,该技术可以有效地避免传统测量方法中存在的误差和漏测等问题,提高了水深测量的精度和可靠性。此外,还可以实现对深度变化的实时监测,通过实时监测航道水深的变化情况,可以及时发现淤积、冲淤等问题,为航道维护和管理提供有力的技术支持。最后,该技术还具有广泛的应用前景。除了航道水深测量外,该技术还可以应用于水利、海洋等领域,如对港口、船舶码头、海岸线等进行快速高精度的测量和监测,为各领域的工作提供有力的支撑。
4 结语
本文研究了基于激光扫描的航道水深快速测量技术,充分阐述了该技术的基本原理、关键技术和方法,详细介绍了激光扫描设备的选型和参数设置、数据采集与处理方法以及水深计算方法等方面的内容,发现该技术在航道水深测量方面具有高精度、高效率、高自动化等优点,可以实现对航道水深的快速、准确测量,并且具有广泛的应用前景和推广价值。然而,也意识到该技术存在一些局限性,需要不断地改进和优化相关技术和方法,未来,将继续深入研究该技术,在实践中不断探索、改进和优化,以实现对航道水深测量更加准确、快速、高效的要求。
猜你喜欢
河北水利(2022年10期)2022-12-29 11:48:12
海洋通报(2022年4期)2022-10-10 07:40:32
留学(2017年5期)2017-03-29 03:03:54
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
浙江国土资源(2015年4期)2015-05-09 08:43:59
现代营销·经营版(2015年3期)2015-04-20 06:46:58
水道港口(2014年1期)2014-04-27 14:14:38
机械制造与自动化(2014年1期)2014-03-01 04:22:04
现代营销·经营版(2013年5期)2013-05-14 14:55:04
水道港口(2013年3期)2013-04-27 14:14:28
