基于改进涡格法的飞翼飞行器动力学建模方法*
2023-12-11 12:10郑维新刘海颖
舰船电子工程 2023年9期
郑维新 刘海颖
(南京航空航天大学航天学院 南京 210016)
1 引言
随着现代通信、测绘等行业的发展需求,高空长航时飞机已成为航空行业的设计热点之一[1]。飞翼构型飞机由于采用了翼体一体化和大展弦比设计,具有气动性能高、节省飞行燃油等优点,已成为理想的设计选择之一。但同时,由于大展弦比的设计,为了减轻载荷,这类飞机的机翼材料多为密度较小的轻质材料,因此机翼的结构刚度不足[2~3]。与常规构型相比,飞机机翼具有柔性特性,导致气动弹性问题更加突出[4~5],而颤振是飞机的主要气动弹性问题之一。在空气动力学和结构动力学的耦合作用下,机翼产生了无衰减振幅的自激振动,最终导致机翼的结构失效。飞翼飞机由于采用大展弦比设计,由于结构模态间的耦合,其颤振特性与常规构型飞机不同。其自身频率较高的刚体运动模态将与结构的低阶模态相耦合,这将导致不同的颤振形式,被称为体自由度颤振。由于刚体运动模态与结构模态的耦合,大展弦比飞机的总体设计难度较大。因此建立具有一定精度和低成本的飞机模型用于分析与控制设计是必要的,也是具有挑战性的。
而对于大展弦比飞行器,已有一系列有效的气动计算方法[6~8]。谢长川等[9]采用了非平面涡格法对大展弦比飞行器进行了气动弹性分析,相比于传统平面方法,提高了气动参数的精确度。Cesnik等[10]则重点研究飞机的结构非线性和气动非线性问题,提出了基于应变梁单元的结构和气动系统建模方法,分析了在结构大变形情况下模型参数的改变,并在此基础上开发了大型柔性飞机非线性气动弹性与飞行力学仿真工具包。
上述研究主要针对气动计算技术,主要研究目的是提高计算精度和与仿真可靠性,计算结果可以用于后续分析与设计,但模型本身并不能直接应用于控制设计。在大展弦比飞行器颤振主动抑制的控制设计方面,Theis[11]等针对明尼苏达大学的MUTT 模型,利用俯仰率、翼尖加速度等作为反馈信息,采用鲁棒H∞的控制方法进行了控制设计,飞行器可以在外界扰动下仍能保持稳定。Schmidt[12]等针对Huignn 模型开展了多学科综合建模与颤振抑制设计,通过MIDAAS等方法取得了良好的颤振抑制效果。 上述研究取得了较好的控制效果,但控制设计过程中使用的模型均为简化后的线性状态空间模型,并没有考虑飞机内部的气动非线性因素,这也给后续算法在实际飞机中的应用带来了困难。因此有必要开发一种适用于大展弦比控制设计的包含气动非线性因素的动力学建模方法。本文的主要内容是对大展弦比飞翼飞机的整体模型进行研究,研究考虑气动非线性的飞机动力学建模问题。
2 飞翼飞行器模型参数与分析
本文研究对象的原始有限元模型为美国明尼苏达大学的maewing2 飞行器[13],其主要几何尺寸如表1所示。通过其有限元模型的质量矩阵和刚度矩阵,计算整机的固有模态参数。并选择在结构变形行为中起主要作用的节点,采用无限样条法(IPS)[14]对结构节点进行气动网格插值,建立气动力与结构变形之间的映射关系。图1 为插值后气动网格变形效果图,各模态对应的固有频率和振型如表2所示。

图1 弹性模态振型
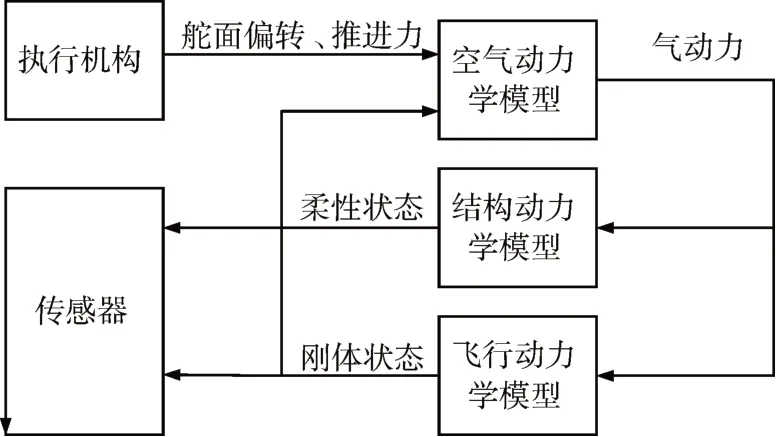
图2 飞行器动力学模型
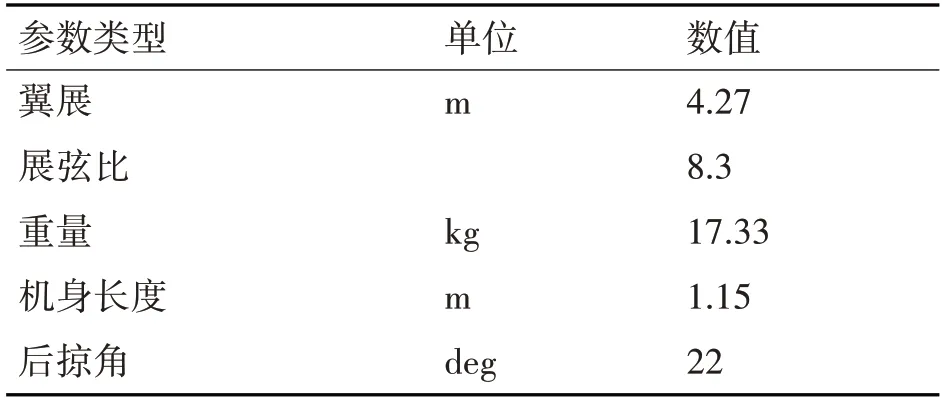
表1 飞行器主要几何参数

表2 主要弹性模态参数
3 飞翼飞行器非线性动力学建模方法
在本研究中,大展弦比飞机的非线性动力学建模主要由结构动力学建模和空气动力学建模两部分组成。结构动力学建模根据预先计算的结构振动模态信息完成,这一部分通过输入的气动力和推力信息计算结构在外力作用下的变形,输出结构变形产生的模态变化信息提供给空气动力学模型。空气动力学模型则利用执行器输入的舵面偏转状态等以及柔性和刚性状态来计算飞行器在当前状态下可以提供的气动力。其中柔性状态包括弹性模态的广义位移、速度和加速度。刚体状态则是指基于机体参照系的飞机的线速度和旋转角速度,可以通过飞机的飞行动力学模型计算得到。最后,利用传感器系统输出的传感器参数,包括飞机的速度和机翼表面的加速度等,来反映飞机的状态。
在本研究中,研究对象的结构非线性较弱,因此在完成结构动力学建模时,采用线性建模的方法来完成弹性模态的计算:
公式中,M、C和K分别表示模态的广义质量,广义阻尼和广义刚度,这些参数可以通过之前的结构有限元模型计算获得。Q代表广义力,由空气动力学模型计算获得。η、和是模态位移、模态速度和模态加速度,代表当前状态下飞行器的弹性模态状态,输出到空气动力学模型中计算结构变形对气动状态的影响。
另一方面,大展弦比飞行器的气动特性和机身周围气流会因飞机外形的变化而时变,飞机外形的变化与飞机气动特性的变化存在非线性关系。为了捕捉飞机运动响应特性与模型的非线性关系,传统计算流体力学方法(CFD)[15],可以达到高保真度的效果,但其计算成本较高,且不容易收敛,而基于势流的面元法相对计算成本低、速度快,更适合于面向开发控制的建模设计。因此,本研究将基于改进后的涡格法[16]进行气动计算,实现飞机气动建模。
传统涡格法的计算过程是将气动面划分为连续的梯形格,其中两条平行的边与来流方向一致。然后,在每个平面单元上设置一个马蹄涡,马蹄涡的边界位于1/4 弦线上。取板的中弦的3/4 点作为板的配置点。在这些配置点处满足零法向流动边界条件。通过满足边界条件方程来确定马蹄涡的强度。马蹄涡的强度则是根据整体外流速度计算的,每个表面单元的力是根据外流特性计算的。力的总和就是总的稳定空气动力。其中单个面元上的气动力可以表示为
以上是涡格法在一般线性情况下的气动力计算过程,而为了捕捉气动非线性对气动模型的影响,考虑对每个面板上的气动力重新单独计算。首先,将计算过程中使用的自由流速度由飞行器总体速度改为各面元表面的自由流速度。第n 块面元的自由流速度可以表示为
此外大展弦比飞行器变形后的面板法向量计算为
最终,根据式(2),第n 块面元所提供的气动力可以表示为
通过对各面元提供的气动力求和可以得到飞行器总的气动力,分别输出到结构动力学模型和飞行动力学模型中,分别得到当前柔性状态和刚体状态。
4 仿真与数据分析
本节将对整机的非线性动力学模型进行仿真分析,以评估所建立模型的性能。通过根轨迹法和传感器输出对系统输入的响应来评估气动非线性对大展弦比飞行器动力学建模的影响。
4.1 系统根轨迹图
图3 是不包含气动非线性的飞行器系统根轨迹图。从图中可以看出,随着飞机速度的增加,飞机的俯仰模态和第一弹性模态的频率逐渐接近,最终发生模态间的耦合,导致颤振的发生。其中代表第一弹性模态的根轨迹穿过虚轴,速度为38m/s 即为飞行器模型的颤振速度。而图4 为加入气动非线性计算的系统根轨迹图,各阶模态的根轨迹变化并不明显,但颤振速度变化为32m/s。气动非线性的引入使得飞机颤振速度的降低,即颤振现象在更低的速度发生了。而这对于后续颤振抑制设计工作边界点的选取具有重要意义,因此通过气动非线性的引入可以更好地评估飞机的颤振特性。

图3 不包含气动非线性的系统根轨迹图

图4 包含气动非线性的系统根轨迹图
4.2 系统响应分析
另一方面,引入气动非线性对飞行器动力学模型的影响可以通过系统对输入的响应更加直观地表现出来,如图所示。由于模型的颤振速度分别为32m/s 和38m/s,因此选取40m/s 为系统速度初始状态,此时两模型均处于颤振状态,将一对副翼偏转对称0.5°引入系统状态变化。图5为无气动非线性模型的系统响应。在不受气动非线性影响的情况下,考虑到耦合的颤振模态为俯仰模态和第一阶弹性模态,因此选取飞机模型的翼尖加速度和俯仰速率响应作为系统响应。从图中可以看出翼尖加速度与俯仰速率在一段时间后逐渐发散。而图6 包含了气动非线性的系统响应,此时翼尖加速度与俯仰率出现周期性震荡而不是持续的发散,这反映了气动非线性因素引入对系统的影响,系统由发散改变为一定范围内震荡。而在颤振抑制设计中,通过引入非线性改变系统特性避免颤振迅速发散也是一种有效的手段。

图5 不包含气动非线性的系统响应图
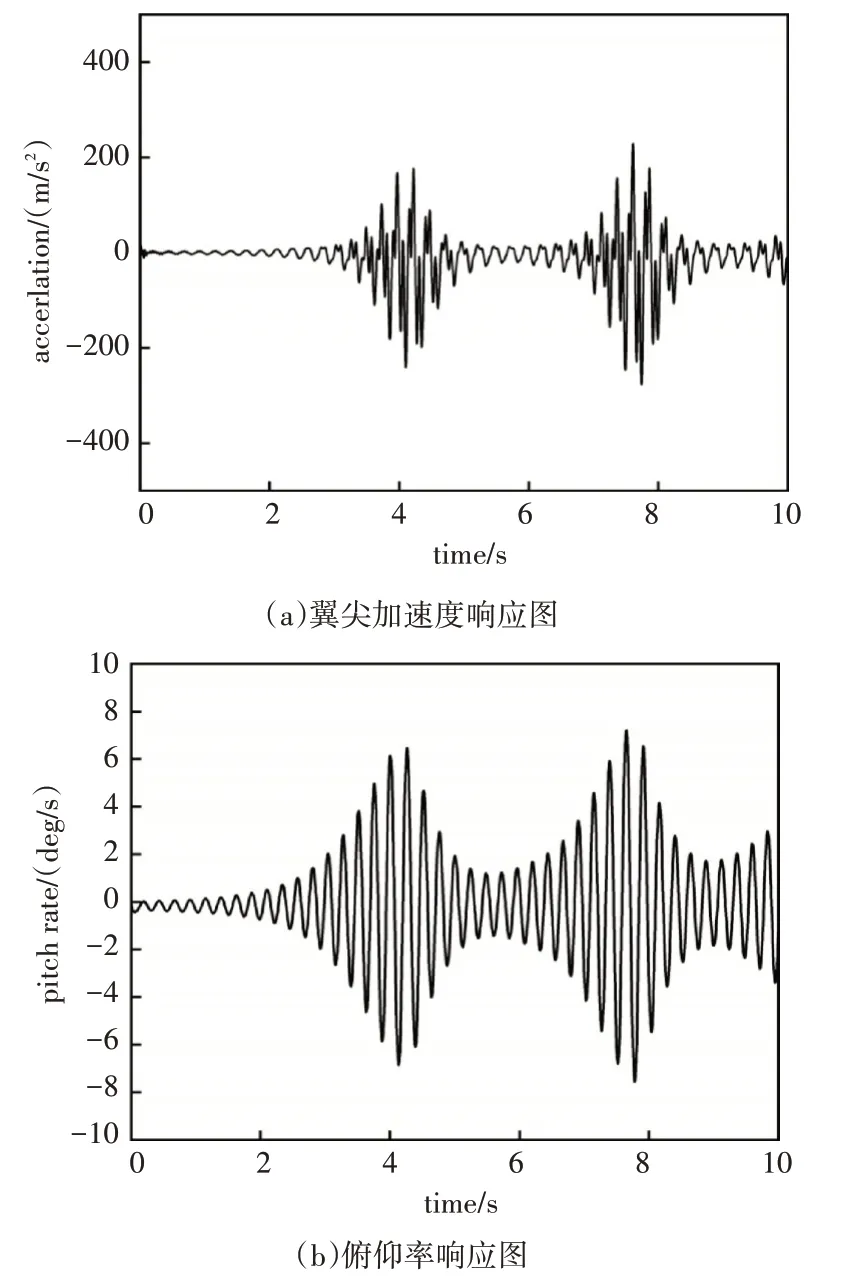
图6 包含气动非线性的系统响应图
5 结语
本文提出了一种基于改进涡格法的大展弦比飞机非线性动力学建模方法。首先,提出一种考虑气动非线性的动力学建模方法。然后,为了验证该方法的有效性,针对一类大展弦比飞行器,分别建立了包含与不包含气动非线性的气动弹性模型。最终通过,根轨迹图和系统响应的方法表明,所提方法能够有效捕捉气动非线性对飞行器气动特性的影响。通过该方法可为后续颤振抑制方法的设计提供更高精度的模型。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
机械设计与制造(2021年2期)2021-03-05
北京航空航天大学学报(2020年3期)2021-01-14
兵器装备工程学报(2020年3期)2020-04-22
电子制作(2018年2期)2018-04-18
北京航空航天大学学报(2017年8期)2017-12-20
安徽农学通报(2017年18期)2017-10-18
北京航空航天大学学报(2017年11期)2017-04-23
小朋友·快乐手工(2015年5期)2015-06-06
中国铁道科学(2014年1期)2014-06-21