基于动态双子群的集成电路瞬态干扰信号识别方法
2023-12-09 07:14:36陈经纬
电气传动自动化 2023年6期
陈经纬
(无锡交通高等职业技术学校,江苏 无锡 214000)
集成电路是电子设备的重要组成部分,已被广泛应用于电力设备中。其具有良好的优势,但是也具有一定的缺陷,其内部电磁环境比较复杂,在运行过程中很容易受到外界因素干扰,其作为电子设备的“内核”,电路的稳定性对电子设备的可靠性与安全性具有重要影响。集成电路的干扰信号中一部分信号干扰周期虽非常短暂,但是对集成电路运行安全与稳定造成的不良影响非常大,该干扰信号为瞬态干扰信号,在瞬态干扰下集成电路电压会出现突变、波动,如果没有采取有效的手段对其进行识别与控制,将会造成电路故障,比如放电故障,因此必须要采取一些手段对电路的瞬态干扰信号进行识别,为其控制提供有力的信息依据。由于国内在集成电路方面研究起步比较晚,虽然近几年集成电路受到研究领域的重视与关注,相关学者与专家开展了一系列研究,但是多数研究集中在集成电路控制与设计方面,关于集成电路瞬态干扰信号识别方面的研究非常少,目前尚处于初步探索阶段,现行方法在实际应用中效果不佳,不仅信号错误识别数量比较多、识别精度比较低,而且识别时间比较长,无法达到预期的瞬态干扰信号识别效果,为此本文提出基于动态双子群的集成电路瞬态干扰信号识别方法。
1 集成电路信号采样
根据集成电路瞬态干扰信号识别需求,此次采用无线传感技术对电路信号样本进行采集,选择AGIU-a5f8无线传感器作为信号采集装置,采用串并联的方式将无线传感器接入到集成电路电源总线上,根据实际情况对无线传感器采样周期、脉冲信号发射频率以及扫描范围等参数进行设定,无线传感器脉冲信号发射端向集成电路发射脉冲信号,脉冲信号经集成电路发生反射效应,由信号接收端接收到反射信号,对于任意一个接收到的信号可以表示为:
式中,F表示无线传感器采集到的集成电路信号样本;h(x)表示有效信号;p(x)表示噪声信号[1]。将采集到的电路信号由读卡器进行读写,并通过无线网络将采样的信号样本发送到计算机上,用于后续瞬态干扰信号特征提取与识别。
2 瞬态干扰信号特征提取
从公式(1)可以看出,无线传感器采集到的信号中包含有效信号与噪声干扰信号,而瞬态干扰信号就包含在噪声干扰信号中,瞬态干扰信号与其他噪声干扰信号不同,其干扰周期非常短、干扰信号波动幅度非常大、干扰功率非常高,因此采用小波分析技术对采集的信号样本进行分解,将其分解为若干个波段,提取到干扰信号特征[2]。考虑到在一般情况下信号中海杂波比较强,会遮盖住干扰信号特征,因此在小波分解前对原始信号的海杂波进行消除,将原始信号转化到频率-多勒普图,利用多勒普矩阵将海杂波在频率-多勒普图中所在的多勒普域置零,以此消除原始信号中海杂波。在上述基础上,对任意电路信号进行连续小波变换,其用公式表示为:
式中,We,bF表示原始信号F变换后的信号小波包;e 表示小波序列伸缩因子;b 表示小波序列平移因子;γe,b表示小波母函数[3]。将上述公式中的小波序列伸缩因子e 取值,取值范围在0~1之间,就形成了二进制小波变换,将变换后的小波包进行多层分解,得到分解后不同波段,其用公式表示为:
式中,ci表示分解后得到的集成电路信号波段;n表示最大分解层数;表示信号小波包的共轭;表示尺度滤波器[4]。对分解后得到的信号小波序列波动幅度进行计算,提取到该波段对应的幅值,其计算公式为:
式中,A(ci)表示集成电路信号幅值表示在信号波段ci区间集成电路最大功率值;表示在信号波段ci区间集成电路最小功率值[5]。利用上述公式计算得到每个小波序列的幅值特征,以此提取到集成电路信号特征。
3 基于动态双子群的干扰信号识别
根据提取到的信号特征,利用动态双子群算法搜索到m个小波序列中的瞬态干扰信号。动态双子群是粒子群算法与人工蜂群算法相结合形成的一种动态混合型算法。假设每个小波序列特征都是一个个体,由m个个体组成种群,为了避免在干扰信号搜索识别过程中出现局部最优,将种群分成两个不同的种群,分别为粒子群与人工蜂群,两个子群通过信息交流,在搜索过程中对种群进化信息进行交流与传递,最终搜索出瞬态干扰信号[6]。根据分解后得到的信号特征生成双子群,粒子群体数量与人工蜂群体数量均为m,并对迭代次数以及学习因子设定[7]。每个群体在特定的空间内进行搜索,将瞬态干扰信号最小幅值作为两个子群动态搜索的目标。在迭代计算过程中两个子群不断更新,产生新的种群,其更新用公式表示为:
式中,u(t)表示更新后的粒子群种群;z(t-1)表示上一时刻个体所在的位置;v表示粒子个体移动速度;c表示学习因子;r表示独立的参数;P表示粒子个体所处的历史最优位置;z表示粒子当前所处的位置;x(t)表示更新后的人工蜂群种群;xd表示在搜索空间内得到的第d维的最小值;ε 表示一个随机数;xz表示在搜索空间内得到的第d维的最大值[8]。更新后的两个子群开展信息交流,按照集成电路瞬态干扰信号最小幅值μ 对两个子群中各个个体适应度值进行计算,其计算公式为:
式中,f(x)表示双子群中个体适应度值;ψ 表示适应度函数。对迭代条件进行检验,如果符合迭代条件,则输出适应度值最大的个体,其对应的集成电路信号为瞬态干扰信号;如果没有符合迭代条件,则继续干扰上述过程对双子群进行动态迭代搜索,直至符合迭代条件为止,以此完成基于动态双子群的集成电路瞬态干扰信号识别。
4 实验论证
4.1 实验准备与设计
为了验证本文提出的基于动态双子群的集成电路瞬态干扰信号识别方法的可靠性与可行性,选择某集成电路作为实验对象,利用本文设计方法对该集成电路瞬态干扰信号进行识别。为了使实验结果与实验数据具有一定的说明性与可靠性,选择两种传统方法作为对比,设计一组对比实验,两种传统方法分别为基于线性模型的识别方法和基于多普勒图的识别方法,以下用传统方法1与传统方法2表示。实验准备了一台AGIU-a5f8无线传感器,将其接入到集成电路总线上,对电路信号样本进行采集,根据该集成电路实际情况,将传感器脉冲信号发射频率设定为2.46Hz,采样周期设定为0.01s,实验共采集到2400个电路信号,其中含有800个瞬态干扰信号,按照上述流程对电路信号进行小波分析,提取到信号特征,并根据实际情况对动态双子群算法参数进行设定,双子群种群大小设定为100,迭代次数设定为200次,惯性权重设置为0.01~0.25,学习因子设置为0.05~2.45,通过迭代计算识别到瞬态干扰信号,以下对具体的识别效果进行检验。
4.2 实验结果与讨论
本次实验以瞬态干扰信号错误识别数量作为三种方法可行性评价指标,瞬态干扰信号错误识别数量越多,表示方法识别精度越低,可行性越差。实验以瞬态干扰信号样本数量为变量,使用电子表格对不同样本下瞬态干扰信号错误识别数量,具体数据如表1所示。

表1 三种方法瞬态干扰信号错误识别数量对比(个)
从上表中数据可以看出,在本次实验中设计方法瞬态干扰信号错误识别数量相对比较少。虽然三种方法瞬态干扰信号错误识别数量均随着识别样本数量的增加而不断增加,但是设计方法增加比例比较小,当识别样本数量达到800个时,瞬态干扰信号错误识别数量仅为4,错识率仅为0.5%,从数量上比传统方法1少88个,比传统方法2少98个;从错识率来看比传统方法1低10.2%,比传统方法2低11.6%,因此证明在精度方面设计方法优于两种传统方法。为了进一步验证设计方法的适用性,对三种方法识别时间进行对比,以采集到电路信号时间作为开始时间,以输出识别结果时间作为结束时间,实验以信号干扰水平作为变量,在采样过程中使用IYHF干扰设备对无线传感器进行干扰,每隔10min提升1Hz干扰频率,对不同干扰水平下三种方法识别时间进行对比,具体数据如表2所示。
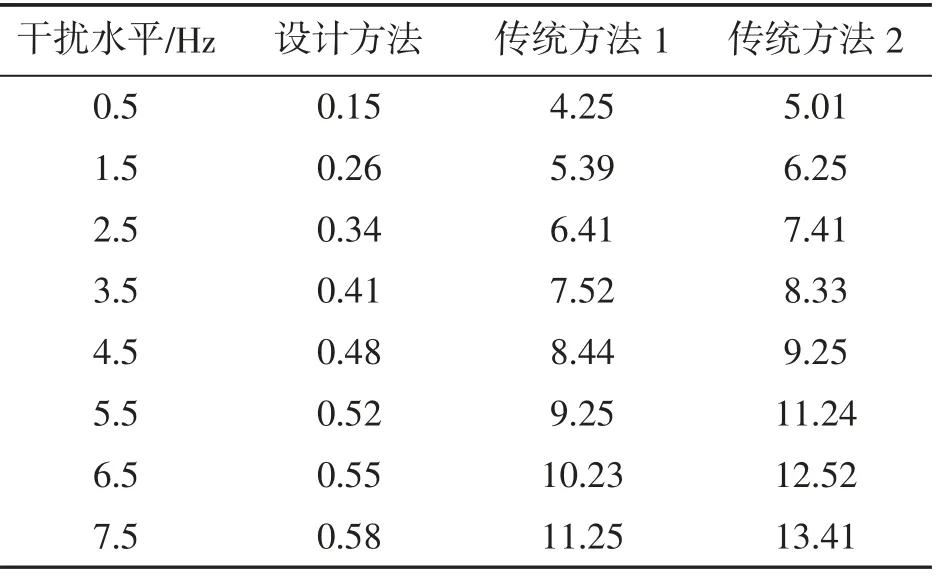
表2 三种方法识别时间对比(s)
从上表中数据可以看出,本文设计方法识别时间相对比较短。虽然三种方法识别时间均随着干扰水平的提升而不断增长,但是设计方法识别时间增长比例比较小,当干扰水平达到7.5Hz时,识别时间仅为0.58s,可以将其控制在1s以内,比传统方法1快将近11s,比传统方法2快将近13s。因此本次实验证明,无论是识别精度还是识别速度,设计方法均表现出明显的优势,相比较两种传统方法更适用于集成电路瞬态干扰信号识别。
5 结论
瞬态干扰信号识别作为集成电路安全可靠运行的重要保障,同时也是集成电路管理工作中一个重要项目,本文参考相关文献资料,针对当前集成电路瞬态干扰信号识别理论存在的不足与缺陷,将动态双子群应用到信号识别中,提出了一个全新的瞬态干扰信号识别思路,并通过实验论证了该思路的可行性与可靠性,有效提高了瞬态干扰信号识别精度与速度,实现了对传统方法的优化与创新,以及对识别理论的补充,具有一定的研究价值。但是本文研究方法尚未在实际中得到大量的实践与应用,在某些方面可能存在一些不足,今后会在方法优化设计方面展开进一步探究,为集成电路瞬态干扰信号识别提供有力的理论支撑。
猜你喜欢
电气技术(2021年3期)2021-03-26 02:46:08
防爆电机(2020年3期)2020-11-06 09:07:36
通信电源技术(2020年22期)2020-03-27 06:48:02
学生天地(2017年20期)2017-11-07 02:26:30
看小说(2017年5期)2017-06-30 20:45:04
工业设计(2016年6期)2016-04-17 06:42:54
中国光学(2015年5期)2015-12-09 09:00:39
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:07
电源技术(2015年12期)2015-08-21 08:58:30
空间控制技术与应用(2015年1期)2015-06-05 12:22:16