
电动汽车参与主动配电网电压调控的策略研究
2023-12-07 08:14王伟杰黄海宇徐远途武小梅阮灿华王晓琳姜淞峻
广东电力 2023年10期
王伟杰,黄海宇,徐远途,武小梅,阮灿华,王晓琳,姜淞峻
(1.南方电网广东清远供电局,广东 清远 511500;2. 广东工业大学 自动化学院,广东 广州 510006)
构建以新能源为主体的新型电力系统已成为我国实现“双碳”目标的重要手段[1]。电动汽车作为一种环境友好的交通工具得到迅猛发展,渗透率日益提升,充电负荷已经成为城市配电网中一种重要的新型负荷。电动汽车的使用在一定程度上缓解了环境和能源压力[2],给电网带来新挑战的同时也给新能源的消纳带来了契机[3-4]。当大量电动汽车渗透到配电网中充电时,充电负荷在时空上具有随机性和分散性,将会造成配电网节点电压降低、变压器过载、线路过负荷、无功匮乏、网损增加等[5-8]。
针对电动汽车充电负荷并网导致节点无功匮乏进而扩大节点电压偏差等问题,文献[9-11]通过传统无功补偿设备(如电容器组、有载调压变压器等)来减小随机充电负荷所带来的电压偏差。传统无功补偿设备的布局是前期规划完成的,通常位置与容量固定不变。当集群式充电负荷并网后需要增设新的无功补偿设备,但电动汽车充电负荷具有时空分布随机性,新增大量的电容器组来缓解充电负荷所产生的负面影响容易引起无功设备的浪费[12-13],降低配电网运行的经济性。
为保障配电网的安全稳定运行和提高配电网运行的经济性,需要科学引导电动汽车与配电网之间的能量交互。目前大多研究集中在电动汽车与电网进行有功功率交换的情形。文献[14]在长时间尺度下研究由于大量电动汽车接入引起配电变压器(以下简称“配变”)容量不足的问题,提出将有序充电和新建配变互补,获得最佳的投资组合规划方案。随着电动汽车充电机的改进与发展[15-16],通过控制充电机内部的电力电子器件即可实现电动汽车在并网过程中对电网进行无功补偿。对此,文献[17]利用充电设施剩余容量进行无功补偿,改善了配电网电压质量,但未考虑与电网中现有无功补偿设备的协同配合;文献[18]提出一种多时间尺度有功无功混合控制的电动汽车集群优化充电策略,在满足充电需求的同时参与电网优化调度并提供无功支持;文献[12,19]通过优化各时段电动汽车的有功及无功或是建立电压无功优化模型来达到降低网络损耗的目,未充分考虑电动汽车的充电需求和不确定性,忽视了用户特性。文献[16-17]直接假定了车辆数与充电需求规律。文献[17,20-21]主要针对慢充且可以长时间停留的充电场景,未考虑快充站中集群式电动汽车接入配电网的运行风险。
大量分散且具备出力随机性和不确定性的分布式电源并入使传统配电网呈现出潮流双向化、控制复杂化等特点,因此仅依靠变电站的调节能力难以满足主动配电网电压质量的要求,还需要综合考虑负荷侧[22]。文献[23]考虑在风电出力波动的情况下,利用鲁棒随机最短路径模型优化电动汽车充电功率消纳风电出力,提高了可再生能源的利用率,但忽视了高渗透率风电接入带来的电压质量问题。文献[24]提出一种分布式光伏并网电压控制方法,通过控制光伏逆变器工作状态,限制光伏发电出力,进而解决并网点电压越限问题,该方法不可避免地会造成弃光问题。如果能充分发挥电动汽车充电负荷的灵活性,使负荷变化与分布式电源出力协调一致,就可以在保证主动配电网电压质量的同时,尽量避免因电压越限而出现的弃风弃光现象。
综上所述,本文充分考虑电动汽车充电机的无功补偿潜力,使其配合传统电容器组的投切,针对高渗透率分布式电源接入和快充站中发生的集群式电动汽车短时大量接入带来的配电网电压偏差,提出一种利用电动汽车充电参与主动配电网电压调节的优化策略。首先,建立基于实际充电数据的电动汽车充电负荷模型;其次,利用电动汽车接入充电机后调整其功率因数以实现无功补偿,并且分析电动汽车接入充电机可对电网进行无功补偿的运行区域;然后,根据潮流计算结果调整充电机的工作区域,同时兼顾车主的充电需求,搭建电动汽车参与主动配电网电压调节的优化模型,以保证车主在驱车离开时充至所需的目标电量;最后,利用改进的粒子群算法求解充电机的最优充电功率以及对电网补偿的无功功率,并以清远某10 kV配电线路为例进行仿真验证。
1 电动汽车充电特性
本文采用清远某10 kV配电线路的充电数据,针对电动汽车的充电行为,剔除统计数据的异常值后,对荷电状态(state of charge,SoC)状态、车辆起始充电时间、停车时长分别采用已知形式的概率分布和未知形式的核密度估计方法进行拟合,拟合结果如图1所示。

图1 起始SoC、结束SoC、起始充电时间和停车时长的概率分布Fig.1 Probability distribution of initial SoC ,final SoC,initial charging time and parking duration of vehicles
由充电数据发现,该地区电动汽车接入的起始SoC和停车时长近似满足韦布尔分布(Weibull distribution),拟合曲线如图1 (a)、(d)所示,拟合所得到的概率密度函数
(1)
式中:x为随机变量;l为比例参数;k为形状参数。图1 (a)起始SoC的比例参数l1=38.933,形状参数k1=1.747,拟合的均方根误差为0.011;图1 (d)停车时长的比例参数l2=64.626,形状参数k2=2.952,拟合的均方根误差为0.010。
电动汽车充电结束的SoC分布符合广义极值分布(generalized extreme value distribution,GEV),拟合所得概率密度函数
(2)
式中:μ为位置参数;σ为尺度参数;ξ为形状参数;c1、c1、c1为常数。图1(b)中μ=75.690,σ=23.999,ξ=1.076,c1=6.910,c2=299.981,c3=-2.118,拟合的均方根误差为0.016。
由图1(c)起始充电时间的分布可以看出,该数据具有多峰分布形状,是非典型分布形状。若直接采用已知分布拟合,函数复杂且拟合效果不佳。核密度估计可以通过将每个数据点周围的核函数组合起来构建概率密度函数,在整个数据范围内提供平滑的估计曲线。这种方法能够捕捉到数据中的多峰性、偏态和其他非典型形状,而不受特定分布形式的限制。本文选择高斯核密度估计方法来对电动汽车起始充电时间进行拟合,指定带宽为0.02,最终拟合曲线如图1(c)所示 ,拟合的均方根误差为0.001 184。
2 充电机运行特性分析
2.1 利用充电机无功补偿原理
电动汽车接入双向充电机可对电网进行无功补偿的运行原理如图2所示,图2中:SEV为充电机的额定容量;PEV为电动汽车充电消耗的有功功率;QEV为充电机向电网吸收或发出的无功功率。本文仅考虑电动汽车在充电过程中参与电网电压调节,因此充电机实际运行在圆的右半部分。当充电机能够提供无功功率时,通过控制信号改变充电机的功率因数,调整其运行模式,使充电过程不仅消耗有功功率,还能根据此刻的电压信息向电网补偿无功功率。
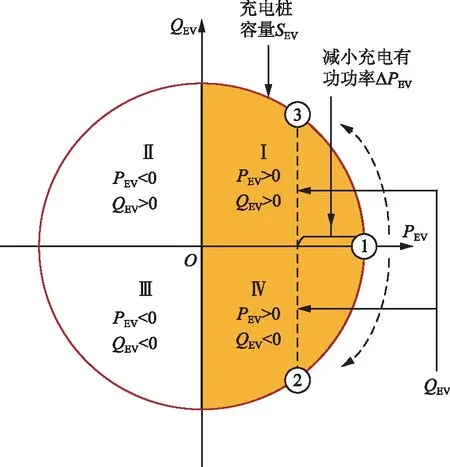
图2 充电机工作特性Fig.2 Working characteristics of EV charger
在参与电压调节的过程中,充电机可以工作在3种状态:充电机工作于状态①时,执行常规充电模式,电动汽车仅完成充电任务,不参与电网电压调节;充电机工作于状态②时,在充电的同时发出无功功率,抬高节点电压;充电机工作于状态③时,在充电的同时吸收无功功率,节点电压会降低。充电机额定容量是固定的,向电网发出的无功大小和自身的充电有功相互影响,并非是单方面的递增或递减。因此,充电机在参与电压调节的过程中势必会减少充电的有功功率,从而换取无功补偿的容量。
2.2 利用充电机无功补偿原理
只有集中式充电站的直流快充桩才有双向充放电功能,因此以充电站为单位进行分析。图3为一个简化的配电网模型,图中:s为始端节点,Us为始端电压,Ps和Qs分别为始端的有功和无功功率;R和X分别为配电网线路中的等效电阻和等效电感;e为末端节点,Ue为末端电压,Pe和Qe分别为末端常规负荷的有功和无功功率;PEV和QEV分别为电动汽车充电站的充电功率和向电网吸收或者注入的无功功率;SEV为充电站的额定容量。

图3 配电网简化模型Fig.3 Simplified model of distribution network
(3)
忽略损耗和电压降落的横分量,可得
(4)
将式(3)代入式(4)可得
(5)
假设始端的电压和末端传统负荷有功功率和无功功率保持不变,则上式可分为两部分,一部分是常数项A,另一部为变量,可得
(6)
式中A=Us-(Pe×R+Qe×X)/Us。
充电机工作在第I象限时,对式(6)求导可得
(7)

图4 充电机感性工作模式 Fig.4 Inductive mode of EV charger
充电机工作在第Ⅳ象限时,即处于容性模式下对电动汽车充电。根据式(7)可知导数小于0,因此末端电压Ue与无功功率QEV呈单调减关系,如图5所示,当QEV=-QEVmax时调节效果最好,此时末端电压为Ue2。当节点电压较低需要提高时,需要向系统注入无功,此时调整充电机处于容性模式向电网发出无功。
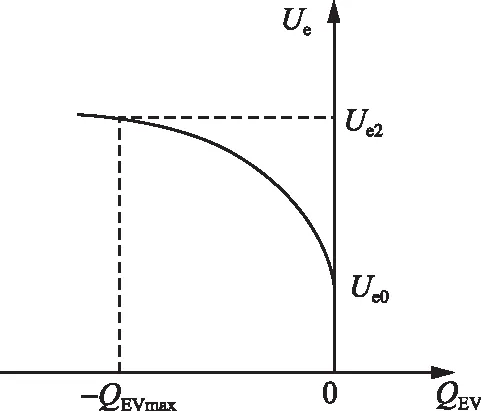
图5 充电机容性工作模式Fig.5 Capacitive mode of EV charger
3 集群式电动汽车参与节点电压调控的模型及求解
3.1 目标函数及约束条件
本文优化调控的变量为各时刻电动汽车可向电网提供无功功率的绝对值,同时考虑电动汽车的充电需求。本文对电压及充电功率进行归一化处理,优化目标为:①当前时刻节点电压偏差的标幺值最小;②所有参与调控的电动汽车仍有充电需求时充电功率标幺值最大;③当前时刻所有节点偏差的平均标幺值最小。因此模型的总目标函数
minF(t)=
(8)
(9)
式(8)、(9)中:t为采样时刻;m为接入了可参与电压调节电动汽车的节点数,简称参与调控节点;μ1,i、μ2,i、μ3均为权重系数,若当前时刻节点电压偏差较大时应调大μ1,i和μ3使得电压偏差尽可能地减小,若当前时刻电压偏差较小时可调大μ2,i以保证车主的充电需求;Up,i(t)为t时刻接入第i个参与调控节点的节点电压标幺值;S为配电网中的节点数;Uj(t)为t时刻第j个节点的电压标幺值;Ni(t)为t时刻第i个参与调控节点参与电压调节的总电动汽车数;PEV,n,i为第i个参与调控节点的第n台电动汽车的充电功率;PEV_st,i为第i个参与调控节点的充电机的额定充电功率。
本文提出的模型,需要满足以下约束条件。
a)潮流约束为:
PGi,t+PWTi,t+PPVi,t=PBi,t+PEVi,t+
(10)
QGi,t=QBi,t+QEVi,t+
(11)
式(10)、(11)中:PGi,t和QGi,t分别为第i个节点在时刻t发电机的有功和无功功率;PWTi,t和PPVi,t分别为第i个节点的风电和光伏在时刻t注入节点i的有功功率;PBi,t和QBi,t分别为第i个节点在时刻t的常规有功和无功功率;PEVi,t和QEVi,t分别为时刻t接在第i个节点的所有充电负荷的有功功率和充电机提供的无功功率;Ui,t和Uj,t分别为时刻t节点i和节点j的电压幅值;Gi,j和Bi,j分别为ij支路的电导和电纳;θi,j为节点i和j的电压相角差。
b)电压约束为
Umin≤Ui≤Umax.
(12)
式中:Ui为节点i的节点电压;Umax、Umin分别为节点电压允许偏差范围的上、下限。
c)电动汽车约束为:
ρstart≤ρn,i≤ρend,
(13)
PEVmin≤PEV,n,i≤PEVmax,
(14)
(15)
式(13)—(15)中:ρn,i为参与调控节点i的第n台电动汽车的SoC;ρstart为充电起始SoC;ρend为充电目标SoC;PEVmax、PEVmin分别为参与调控节点i的第n台车的充电功率上、下限;QEV,n,i为参与调控节点i的第n台车充电机提供的无功功率。
d)电容器组约束为
0≤NCBi≤NCBi,max.
(16)
式中:NCBi为节点i投入的电容组数;NCBi,max为接入节点i的并联电容器组的总电容器组数。
3.2 电动汽车充电机参与电压调控时的无功补偿范围
电动汽车参与主动配电网电压调节模型的前提是电动汽车充电过程中存在无功容量,因此根据电动汽车电池的荷电状态以及充电需求,可计算电动汽车充电过程中向电网提供的无功范围。如果当前时刻节点电压偏低,则调控充电机向电网发出无功功率,提高节点电压;如果节点电压较高,则调控充电机吸收无功功率,降低节点电压。
根据车主的预计停车时长Tuser和目标SoC可求得充电机工作在额定功率时电动汽车充至目标SoC所需要的最小充电时长Tmin。如果Tuser>Tmin,该电动汽车在充电过程中存在无功容量可参与电压调节,调整充电机位于模式②或③从而实现对电网的无功补偿;反之则该电动汽车仅完成自身充电任务,不参与电压调节。如果Tuser>Tmin,在满足车主的充电需求前提下,求出每个采样间隔内的最小充电功率PEVmin以保证车主在驱车离开时达到预期的电量。同时在采样间隔内保持PEV不变,直到下一个采样时刻才更新PEV。通过式(17)可求出在当前采样间隔内的最小充电功率PEVmin以及向电网提供最大无功功率的绝对值|QEVmax|。
(17)
式中:ρnow为当前时刻的SoC;B为电动汽车电池容量;tend、tnow分别为车主的取车时刻、当前时刻。
3.3 集群式电动汽车提供无功补偿的电压调节流程
根据当前时刻的节点电压情况、分布式电源出力大小、每台电动汽车的预计驶离时刻和充电目标SoC等信息,分别求解参与电压调节的电动汽车向电网补偿的最优无功功率。充电机工作在容性模式下提高节点电压;而在感性模式下可降低节点电压,并根据当前时刻的电压信息相应地调整充电机的运行模式。每个采样周期操作完成后需要更新电动汽车充电信息,更新完成后进入下一采样周期。电压调控模型如图6所示。

图6 电动汽车参与主动配电网电压调控流程Fig.6 Voltage regulation flowchart of EVs participating in active distribution network
3.4 基于淘汰与纵横交叉混合机制的改进粒子群算法
本文优化模型中的数据具备较强的耦合性以及高维度特征,采用传统的粒子群算法会存在早熟的问题。本文在粒子进行更新迭代的过程中引入纵横交叉与淘汰2种机制,并利用改进的粒子群算法求解上述电压调控模型。具体步骤为:
a)为保证种群多样性,采用 Halton序列对初始粒子进行映射,使粒子均匀分布于空间内不同位置,见式(18)。
xi,d=xmin,d+σ(i)×(xmax,d-xmin,d).
(18)
式中:xi,d为第i个初始粒子在d维度上的映射值;xmin,d和xmax,d分别为粒子在d维度上的下限、上限;σ(i)为Halton序列生成[0,1]之间的第i个随机数。
b)将潮流计算所得的潮流收敛状态、电动汽车荷电状态和电容器组无功出力等数据代入约束条件进行判定,只要有一条不符合约束条件即有个体越界。本文采用Beta分布随机数的策略对越界粒子进行修正,根据式(19)将越界粒子均匀分布至可行解的搜索空间内。
(19)
式中:xi,d和x′i,d分别为第i个粒子在第d维修正前、修正后的位置;xmax,d、xmin,d分别为第i个粒子在第d维中最大值、最小值;b(α,β)为服从Beta分布的随机数,α、β均为决定Beta分布概率密度函数的形状参数;xgbest,d为当前搜索空间中适应度最好的粒子个体在第d维的位置。
c)速度和位置更新方法为:
v′i=ωvi+c1r1(pbest,i-xi)+c2r2(gbest-xi),
(20)
x′i=xi+v′i.
(21)
式(20)、(21)中:vi、v′i分别为粒子i更新前、更新后的速度;c1为个体学习因子,c2为整体学习因子;r1、r2均为(0,1)范围内的随机数;pbest,i为粒子i的自身历史最优解;gbest为全局最优解;xi、x′i分别为粒子i更新前、更新后的位置;ω为非线性惯性权重,表征粒子受更新前运动惯性的影响程度,如式(22)。
ω=ωmin+(ωmax-ωmin)cos[(h/hmax)1/2×π/2].
(22)
式中:ωmax、ωmin分别为最大、最小惯性权重;h为当前迭代次数;hmax为最大迭代次数。
d)本文采用淘汰与纵横交叉混合机制处理位置更新后的粒子群。该混合机制的优势在于:基于适应度值对位置较差的个体进行淘汰之后,算法会通过横向交叉对种群中的不同个体进行空间边缘搜索,可以在减少盲点的同时提升算法全局寻优能力;并且通过纵向交叉对个体不同维度进行交叉运算,在不影响其他维度的前提下,促进陷入停滞的维度跳出局部最优。
淘汰机制会在粒子群算法的惯性权重自适应调整完后,根据这一轮各粒子的适应度值进行降序排列,淘汰适应度值排在后50%的粒子,保留前50%的粒子。
纵横交叉机制会对未被淘汰的粒子进行横向交叉运算和纵向交叉运算生成新的粒子,新产生粒子成功通过步骤b)越界判断后,将被填补至种群当中,完成更新之后的粒子与淘汰机制下保留的前50%粒子组成新的种群。其中横向和纵向交叉的具体运算方法如下:
横向交叉是对种群中2个不同粒子在同一维度进行交叉运算,促使不同粒子之间相互学习,以增加种群的多样性和全局搜索能力。粒子进行横向交叉之前,首先对粒子进行两两配对,假设对父代个体xi和xj进行横向交叉,则根据式(23)、(24)获得交叉后的子代个体,产生的子代个体称之为横向交叉中庸解,用Mhc表示。
Mhci,d=a1×xi,d+(1-a1)×xj,d+
b1×(xi,d-xj,d),
(23)
Mhcj,d=a2×xj,d+(1-a2)×xi,d+
b2×(xj,d-xi,d).
(24)
式(23)、(24)中:a1和a2为区间[0,1]上的随机数;b1和b2为区间[-1,1]上的随机数;xi,d和xj,d分别为第i个和第j个个体作为父代进行横向交叉的第d维的位置;Mhci,d和Mhcj,d为2个横向交叉中庸解的第d维的位置。
纵向交叉是针对个体自身2个不同的维度进行的一种交叉操作。通过这种操作可有一定几率使得陷入局部最优的粒子跳出局部最优,从而避免粒子的寻优过程提早结束。与横向交叉不同的是,纵向交叉一次只对一维进行更新,这是为了保留不参与纵向交叉的维度中所具有的信息。假设对父代xi的第d1维和d2维进行纵向交叉,通过式(25)产生新的个体,产生的个体称之为纵向交叉中庸解,用Mvc表示。
Mvci,d1=c×xi,d1+(1-c)×xi,d2.
(25)
式中:c为区间[0,1]上的随机数;Mvci,d1为父代xi的第d1维和d2维进行纵向交叉后产生的纵向中庸解的第d1维。横向和纵向的双交叉算子的交替运行,使得纵横交叉机制具备较强的搜索能力。在每次交叉完成,得到的中庸解都需要与其父代进行竞争,唯有具备更高的适应度才能进入步骤c)进行下一次迭代,直至满足停止条件或到达最大迭代次数。
4 算例分析
将本文所提策略用于清远某10 kV配电线路,其总容量为26 540 kVA,网络拓扑如图7所示,新能源发电主要用于充电站内电动汽车充电。在8号节点接入容量为4 000 kW的分布式风电,在10号节点以及18号节点接入容量为3 000 kW的分布式光伏;在9号节点和17号节点配备电容器组CB1、CB2,单组容量为100 kvar,最大组数为5组;在10号节点以及18号节点接入电动汽车充电站,每个充电站配备10台充电机,单个充电机的额定功率为120 kW,电动汽车的电池容量为100 kWh,其充电规律符合第1章所拟合的分布。本模型采用基于纵横交叉与淘汰混合机制的改进粒子群算法求解最优无功功率,设置粒子的种群数为40,迭代次数200,最大惯性权重0.75,最小惯性权重0.25,纵向交叉的概率为60%。

图7 清远某10kV配电线路拓扑
建立风电出力的组合预测模型[25],经过变分模态分解(variational mode decomposition,VMD)后的子序列个数为5,惩罚系数设为2 000,建立的深度神经网络包含4个一维卷积神经网络层、2个长短期记忆网络层和2个全连接层,数据集包括风速、温度、湿度和风电出力;建立基于VMD和核极限学习机(kemel based extreme learning machine,KELM)的光伏出力预测模型[26],经过VMD分解后的子序列个数为6,惩罚系数设为2 000,KELM的核函数设为高斯核函数,初始惩罚系数和初始核参数均位于[10-2,102],数据集包括辐照度、温度和光伏出力。数据来源为清远的风电场与光伏电站的历史气象数据和出力数据,得到典型日的出力预测如图8所示。

图8 典型日分布式电源出力预测Fig.8 Distributed power output forecast in typical daily
为了评估本文所提电压调控模型对节点电压的改善情况,设置4个典型场景进行仿真分析,4个场景见表1。本算例中调控策略的周期为15 min,记录并分析各时刻节点的电压水平、电动汽车充电消耗的有功功率、电动汽车对电网补偿的无功功率以及电容器组的投放量。仿真结果中不同场景充电站节点电压曲线如图9所示。

表1 仿真场景Tab.1 Simulation scenarios

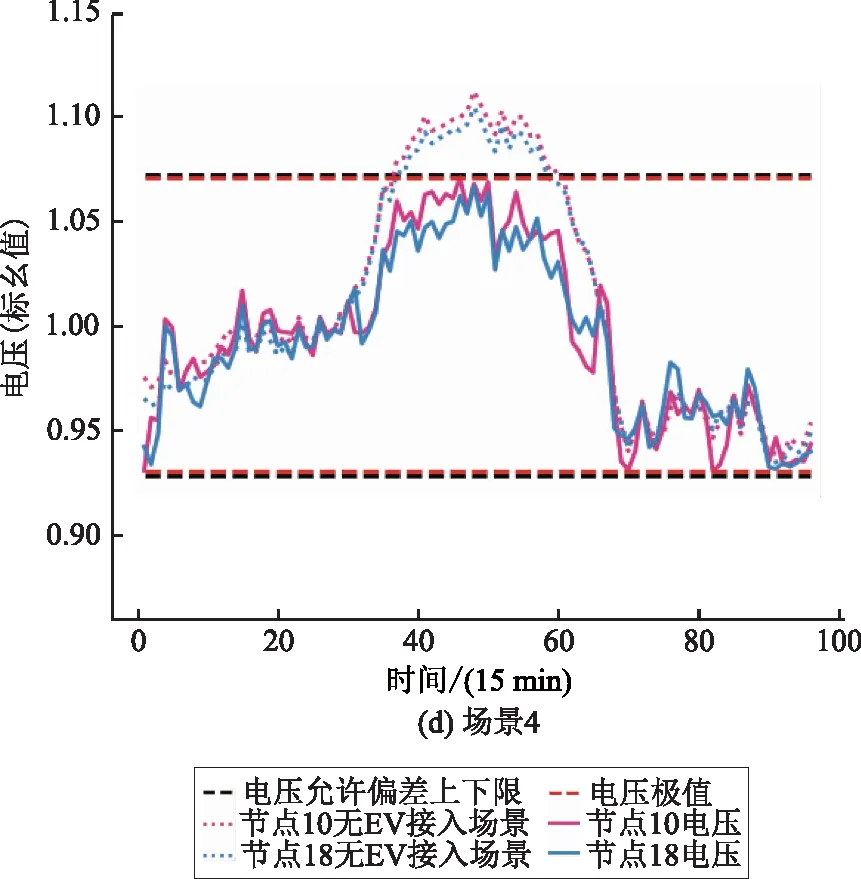
图9 不同场景充电站节点电压曲线Fig.9 Node voltage curves of charging stations in different scenarios
该配电网在无电动汽车接入的情况下,节点在09:00—15:00即分布式电源出力较大的时间段发生电压越上限,没有发生电压越下限情况。如图9(a)所示:当集群式电动汽车接入且电容器组没有投入的情况下,充电站所在的10号节点和18号节点在多个时刻出现了不同程度的电压越限;10号与18号节点电压越下限时间段主要集中于00:30前与17:00后,18号节点电压在00:15时刻低至0.882(标幺值,下同);由于电动汽车无序消纳部分分布式电源出力,电压越上限的情况有所改善。如果集群式电动汽车在10号和18号节点参与电压调控,消耗适量无功与优化充电负荷使得电压不再越上限,节点电压偏差明显降低,均方根误差从0.065降至0.045,10号节点与18号节点电压具体情况见表2与表3。

表2 不同场景10号节点电压(标幺值)情况Tab.2 Voltage of node 10 in different scenarios

表3 不同场景18号节点电压(标幺值)情况Tab.3 Voltage of node 18 in different scenarios
当配电网电压普遍偏低时,一般采用投入并联电容器组调压,从图9(c)可以看出,当投入一定组数的电容器组后,10号和18号节点电压不再越下限,由于电容器组无法应对电压偏高情况,此时节点电压仍有部分时刻越上限。结合表2、3与图9(d)可以看出,在投入电容器组调压的同时集群式电动汽车也参与电压调控,不仅保证了电压处于允许范围内,还使得电压偏离额定值的程度减小,电压波动幅度减小,提高了电压质量。
图10为接入10号节点的充电站在日内96个时段的有功功率和无功功率补偿情况。在场景1中,由于电动汽车不参与调控,充电站只作为负荷,消耗电网的有功功率,如图10(a)所示。在场景2中,参与电压调控的充电机在合适的时段提供无功功率来支撑电压,如图10(b)所示。在00:30前与17:00后这2个时间段,充电机转移了部分有功功率,以减轻功率峰值,并释放出容量进行无功补偿,从而提高越限时段节点的电压;在07:30—16:00时间段,分布式电源大量出力导致节点电压偏高,充电机此时处于感性模式,在充电的同时吸收无功功率,每个时刻都需要通过优化求解寻找最佳运行点,使电压降低效果最好。充电站的有功功率和无功补偿会根据电压状况和车主充电需求被灵活调整,以满足电网的要求。

图10 10号节点充电站有功功率与无功功率Fig.10 Active power and reactive power of charging station at node 10
图11为18节点处充电站某辆电动汽车参与电压调控前后的充电功率对比,该电动汽车起始SoC为22%,结束SoC为98%,停留时间为47 min。不参与调控的场景下该电动汽车“即来即充”,仅消耗有功功率,且在图11中充电时间段T1(共38 min),充电机以最高有功功率运行,充到所需SoC仍有9 min的停留时间,即图11中空闲时间段T2,该时间段内车主未驶离车辆且无充电行为;参与调控后该电动汽车所消耗的有功功率并非固定,每隔15 min针对配电网电压状况进行1次充电功率优化,充电功率整体呈现“先快后慢”的趋势,能在较短时间内充入大部分电量以应对车主提前驶离的状况。本文所提方法不会影响车主停留时间,仅利用电动汽车充电结束时刻与驶离时刻之间的空闲时间段T2,充电机可以改变充电功率以对有功和无功功率进行有效调整,进而参与主动配电网电压调控;另外本文的调控不涉及放电过程,且无功补偿是通过控制充电机内部的电力电子器件完成,故提出的电动汽车参与主动配电网电压调节策略可以充分满足车主的充电需求且不会影响电池寿命。

图11 电动汽车参与电压调控前后的充电功率曲线 Fig.11 Charging power curves of before and after EV in voltage regulation
配电网运行过程中通常会采用电容器组的投切来保证节点电压满足电能质量的要求。图12为场景3和场景4的电容器组(CB)投放数量对比。由图12可见,场景3由于电压偏低,电容器组所需投切组数较多才能保证电压不越下限。由于集群式电动汽车参与电压调控,已经对整体电压进行了优化,因此在场景4中,CB1与CB2的投切组数都明显下降,只需要在个别电压越下限的时刻投入少量组数,便可保证电压偏差在允许范围以内。

图12 不同场景电容器组投放组数Fig.12 Used capacitor banks in different scenarios
5 结论
针对集群式电动汽车接入配电网的运行风险,本文提出了一种利用电动汽车充电过程中充电机的无功容量参与主动配电网电压调节模型。并采用纵横交叉与淘汰混合机制的改进粒子群算法求解该模型,对清远某10 kV配电线路进行仿真分析,验证了所提策略的有效性,得到如下结论:
a)本文提出的电动汽车参与调压策略能够有效降低配电网电压越下限的风险。规模化集群式电动汽车接入配电网中会对节点电压造成冲击,通过调控可以有效转移部分充电功率,减少功率峰值,并提供容量进行无功补偿,以减小节点电压偏差、无功不足等问题。
b)通过电动汽车参与调压策略可以充分发挥充电负荷的灵活性,使负荷变化与分布式电源出力协调一致,解决并网点电压越限问题的同时,减少因此出现的弃风弃光现象。
c)在电动汽车参与调控的基础上,只需要投入更少的电容器组便可确保电压偏差不越限。在未来电动汽车充电基础设施大幅增长且有一定比例参与调控的情况下,可以节省电网对无功补偿设备的投资。
d)通过电动汽车参与电压调控和灵活投切电容器组相互配合,系统能够更全面地管理主动配电网电压,不仅在电压偏差越下限时段利用电容器组保证电压在允许范围内,而且在其他时段也能有效控制电压偏离的程度,从而减小电压波动范围,有利于电力系统的稳定运行和提高电压质量。
猜你喜欢
物理之友(2020年12期)2020-07-16
电子制作(2019年22期)2020-01-14
山东冶金(2019年5期)2019-11-16
初中生世界·八年级(2019年6期)2019-08-13
电子测试(2018年13期)2018-09-26
小学生导刊(低年级)(2016年6期)2016-07-02
通信电源技术(2016年6期)2016-04-20
通信电源技术(2016年4期)2016-04-04
计算机工程(2015年8期)2015-07-03
振动、测试与诊断(2014年6期)2014-03-01
